Изобретение относится к области авиастроения, в частности к конструированию интеллектуальных воздушных боеприпасов и беспилотных летательных аппаратов.
При конструировании интеллектуальных воздушных боеприпасов и ударных беспилотных летательных аппаратов стоит задача повышения их скорости полета одновременно с обеспечением высокой маневренности при наведении на скоростную воздушную цель. Также является актуальным обеспечение возможности барражирующего полета интеллектуальных воздушных боеприпасов и ударных беспилотных летательных аппаратов в поисках цели и полета с огибанием поверхности при выходе в район поиска цели. Известны технические решения, обеспечивающие максимальную скорость полета, но не позволяющие выполнять сложные маневры при наведении на воздушную цель.
Известен беспилотный летательный аппарат (БПЛА) [п. на полезную модель РФ №107126, МПК (2006.01) В64С 39/10, опубликован 10.08.2011 г. ], содержащий корпус (крыло) и двигатель. Также содержит фюзеляж и винт. Крыло с органами управления выполнено из условия использования аэродинамической схемы «летающее крыло». Фюзеляж расположен в носовой части БПЛА в контакте с передней кромкой крыла, а двигатель - в хвостовой части в контакте с задней кромкой крыла.
Недостатком данного технического решения является низкая маневренность в горизонтальной плоскости, свойственная большенству летательных аппаратов, выполненных по схеме «бесхвостовика».
Известен беспилотный летательный аппарат типа «летающее крыло» [з. Китай №106347663, МПК(2006.01) В64С 39/10, 3/10, 3/40, B64D 37/04, опубликована 25.01.2017 г.], содержащий корпус и двигатель. Корпус выполнен по интегральной аэродинамической схеме, в хвостовой части которого установлен двигатель.
Двигатель выполнен с толкающим винтом. Симметрично с двух сторон корпуса расположены внешние панели крыла, объединенные с корпусом за счет соединительных конструкций. Передние и задние кромки внешних панелей крыла откидываются назад.
Достоинством известного летательного аппарата является улучшение боковой устойчивости, повышение подъемной силы.
Недостатками известного устройства являются низкая маневренность в горизонтальной плоскости, приводящая к большому радиусу поворота при горизонтальном маневре. Кроме того расположение двигателя с толкающим винтом сзади крыла приводит к частичному экранированию воздушного двигателя при вертикальных маневрах.
Данное устройство принимается за прототип, как наиболее близкое по технической сущности к заявляемому изобретению.
Задачей, на решение которой направлено изобретение, является создание летательного аппарата обеспечивающего повышенную маневренность с возможностью устойчивого полета с огибанием поверхности.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении маневренности летательного аппарата в горизонтальной плоскости и обеспечение возможности полета с огибанием поверхности.
Указанный технический результат достигается тем, что летательный аппарат с повышенной маневренностью содержит корпус и двигатель, корпус выполнен по интегральной аэродинамической схеме, в хвостовой части которого установлен двигатель, согласно изобретению в носовой части корпуса установлено управляемое переднее вертикальное оперение, на поверхности корпуса установлены вертикальные кили, а на задней поверхности корпуса выполнены элевоны.
Выполнение в носовой части корпуса управляемого переднего вертикального оперения, за счет выноса в носовую часть корпуса за центр масс летательного аппарата позволяет обеспечить гораздо большее отклонение летательного аппарата в горизонтальной плоскости, чем разнонаправленные элевоны и не приводит к боковому наклону летательного аппарата. Установка на поверхности корпуса вертикальных килей за счет продольного обтекания набегающим потоком воздуха позволяет обеспечить курсовую и боковую устойчивость летательного аппарата. А выполнение на задней поверхности корпуса элевонов за счет синхронного отклонения во время движения летательного аппарата позволяет выполнять вертикальные маневры.
Кроме того, с целью подавления эффекта экранирования воздушного двигателя при вертикальных маневрах летательного аппарата, в хвостовой части корпуса выполнена свободная зона перед воздухозабором двигателя, выполненного в виде импеллера.
Также с целью обеспечения полета на предельно малой скорости при огибании поверхности, летательный аппарат оснащен дополнительными крыльями, в исходном положении расположенными внутри корпуса с возможностью выдвижения и фиксации в конечном положении.
С целью обеспечения полета на предельно высокой скорости на финальной стадии выполнения полетного задания, дополнительные крылья выполнены с возможностью сброса в полете.
Кроме того с целью повышения устойчивости полета на предельных скоростях, по краям корпуса установлены гондолы, во внутренней полости которых размещены оптические стереоскопические головки самонаведения.
Также с целью понижения расположения центра масс летательного аппарата, и как следствие для повышения устойчивости полета на предельно малой скорости, на нижней поверхности корпуса вдоль оси летательного аппарата выполнен продольный выступ.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки, которые содержит отличительная часть формулы изобретения, не выявлены в технических решениях аналогичного назначения, на этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежом:
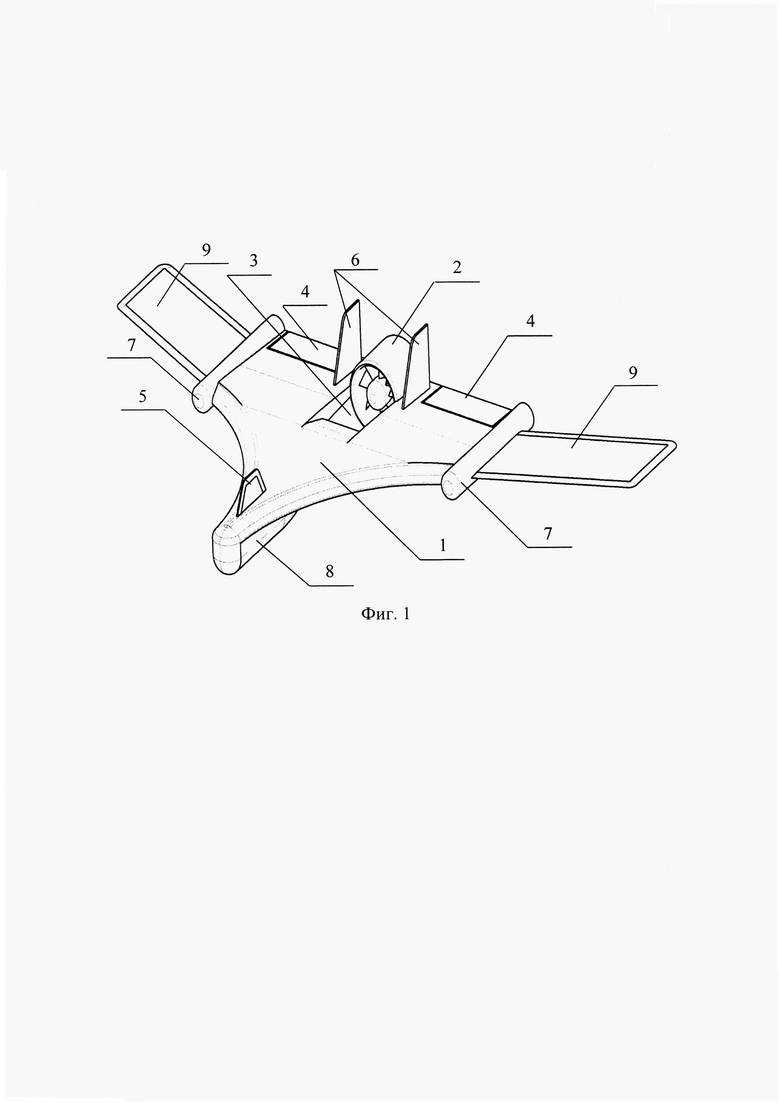
на фиг. 1 представлен общий вид летательного аппарата.
Летательный аппарат с повышенной маневренностью содержит корпус 1 и двигатель 2. Корпус 1 выполнен по интегральной аэродинамической схеме. В хвостовой части корпуса 1 установлен двигатель 2, выполненный в виде импеллера, и выполнена свободная зона 3 перед двигателем 2 для воздухозабора. Свободная зона перед двигателем 2 исключает эффект экранирования при изменении угла атаки. На задней поверхности корпуса 1 расположены два элевона 4, выполненные с возможностью поворота. В носовой части корпуса 1 установлено управляемое переднее вертикальное оперение 5 с возможностью вращения. Управляемое переднее вертикальное оперение 5 за счет выноса в носовую часть корпуса 1 за центр масс летательного аппарата обеспечивает гораздо большее отклонение летательного аппарата в горизонтальной плоскости чем разнонаправленное отклонение элевонов 4 и не приводит к боковому наклону летательного аппарата. На поверхности корпуса 1 параллельно оси летательного аппарата установлены неуправляемые вертикальные кили 6. По краям корпуса 1 с максимальным разнесением от центральной оси летательного аппарата установлены гондолы 7, в которых размещены видео модули оптических стереоскопических головок самонаведения (не показано) для обнаружения воздушных целей с селекцией по расстоянию. Такое размещение позволяет обеспечить максимальный стереобазис оптических стереоскопических головок самонаведения, что повышает расстояние, на котором происходит селекция целей. На нижней поверхности корпуса 1 вдоль оси летательного аппарата выполнен продольный выступ 8, в котором размещены внутренние элементы летательного аппарата, обеспечивающие понижение по высоте выступа 8 расположение центра масс летательного аппарата, повышая боковую устойчивость полета на предельно малой скорости. Летательный аппарат оснащен дополнительными крыльями 9, в исходном положении расположенными внутри корпуса 1.
Работает устройство следующим образом
Запускают двигатель 2 летательного аппарата. Затем осуществляют запуск летательного аппарата с катапульты (не показано). Во время взлета, на минимальной скорости полета, неуправляемые кили 6, гондолы 7 и выступ 8 за счет продольного обтекания набегающим потоком воздуха обеспечивают курсовую и боковую устойчивость летательного аппарата. Набрав высоту, летательный аппарат продолжает движение на крейсерской скорости, устойчивость полета при которой обеспечивается за счет продольного обтекания набегающим потоком воздуха неуправляемых килей 6, гондол 7 и продольного выступа 8. Продолжая движение по заданному маршруту, летательный аппарат выполняет вертикальный маневр для движения на заданной высоте полета за счет синхронного отклонения элевонов 4 на задней поверхности корпуса 1. При отклонении элевонов 4 ниже поверхности корпуса 1 летательный аппарат набирает высоту, а при отклонении элевонов 4 выше поверхности корпуса 1 летательный аппарат снижается. Аналогичный вертикальный маневр осуществляется при наведении на цель. При движении по маршруту летательный аппарат выполняет курсовой (горизонтальный) маневр за счет отклонения на заданный азимут управляемого переднего вертикального оперения 5, расположенного в носовой части корпуса 1. Аналогичный маневр летательный аппарат выполняет при наведении на цель. Достигнув определенной точки, летательный аппарат продолжает движение в барражирующем режиме поиска цели. Поиск цели с селекцией по расстоянию осуществляют видео модули оптической стереоскопической головки самонаведения, размещенные в гондолах 7. Двигаясь в барражирующем режиме, летательный аппарат снижает скорость полета за счет выдвижения дополнительных крыльев 9, механически фиксирующихся в конечном положении. Аналогичное снижение скорости полета летательного аппарата осуществляется и при полете с огибанием поверхности при движении по заданному маршруту. На финальной стадии полетного задания при наведении на обнаруженную цель дополнительные крылья 9 сбрасываются для достижения максимальной скорости полета за счет снижения лобового сопротивления потоку воздуха. При изменении угла атаки для наведения на цель летательного аппарата свободная зона 3 перед воздухозабором двигателя 2 в хвостовой части корпуса 1 обеспечивает устойчивость работы двигателя 2, за счет того что корпус 1 не экранирует поток воздуха в направлении вертикального маневра.
Таким образом, вышеизложенные сведения свидетельствуют о выполнении при использовании заявленного изобретения следующей совокупности условий:
- средство, воплощающее заявленное изобретение при его осуществлении, предназначено для интеллектуальных боеприпасов и ударных беспилотных летательных аппаратов;
- для заявленного устройства в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления;
- средство, воплощающее заявленное изобретение при осуществлении, способно обеспечить повышенную маневренность с возможностью полета с огибанием поверхности.
Следовательно, заявленное изобретение соответствует условию «Промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой беспилотный летательный аппарат | 2021 |
|
RU2763896C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Барражирующий боеприпас | 2023 |
|
RU2818171C1 |
| КОМПЛЕКС АВИАЦИОННО-РАКЕТНЫЙ АДАПТИВНЫЙ | 2019 |
|
RU2720569C1 |
| КОМПЛЕКС АДАПТИВНЫЙ РАКЕТНО-АВИАЦИОННЫЙ | 2019 |
|
RU2720592C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| ВОЗВРАЩАЕМЫЙ МНОГОРЕЖИМНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2006 |
|
RU2327604C1 |
Изобретение относится к области авиастроения, в частности к конструированию интеллектуальных воздушных боеприпасов и беспилотных летательных аппаратов. Летательный аппарат с повышенной маневренностью содержит корпус и двигатель. Корпус выполнен по интегральной аэродинамической схеме, в хвостовой части которого установлен двигатель. В носовой части корпуса установлено управляемое переднее вертикальное оперение, а на поверхности корпуса установлены вертикальные кили. На задней поверхности корпуса выполнены элевоны. Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении маневренности летательного аппарата в горизонтальной плоскости и обеспечении возможности полета с огибанием поверхности. 5 з.п. ф-лы, 1 ил.
1. Летательный аппарат с повышенной маневренностью, содержащий корпус и двигатель, корпус выполнен по интегральной аэродинамической схеме, в хвостовой части которого установлен двигатель, отличающийся тем, что в носовой части корпуса установлено управляемое переднее вертикальное оперение, на поверхности корпуса установлены вертикальные кили, а на задней поверхности корпуса выполнены элевоны.
2. Летательный аппарат с повышенной маневренностью по п. 1, отличающийся тем, что в хвостовой части корпуса выполнена свободная зона перед воздухозабором двигателя, выполненного в виде импеллера.
3. Летательный аппарат с повышенной маневренностью по п. 1, отличающийся тем, что летательный аппарат оснащен дополнительными крыльями, в исходном положении расположенными внутри корпуса с возможностью выдвижения и фиксации в конечном положении.
4. Летательный аппарат с повышенной маневренностью по п. 3, отличающийся тем, что дополнительные крылья имеют возможность сброса в полете.
5. Летательный аппарат с повышенной маневренностью по п. 1, отличающийся тем, что по краям корпуса установлены гондолы.
6. Летательный аппарат с повышенной маневренностью по п. 1, отличающийся тем, что на нижней поверхности корпуса вдоль оси летательного аппарата выполнен продольный выступ.
| US 2021053683 A1, 25.02.2021 | |||
| CN 110987287 A, 10.04.2020 | |||
| CN 108974361 A, 11.12.2018 | |||
| CN 203740126 U, 30.07.2014 | |||
| САМОЛЕТ | 1999 |
|
RU2168447C2 |

