Изобретение относится к области авиации, в частности к беспилотным летательным аппаратам (БПЛА) и беспилотным летательным системам (БПЛС), и может быть использовано при разработке многофункциональных беспилотных летательных систем.
Известны:
1. Проект «Tom - Tom» (США) [1].
2. Проект самолета вертикального взлета и посадки (СВВП), выполненный по схеме «бесхвостка» под руководством академика Б.Н. Юрьева и И.П. Братухина [1].
3. Авиационный комплекс вертикального взлета, состоящий из беспилотного тяжелого самолета-носителя и двух буксируемых на концах крыла легких многоцелевых самолетов, каждый из которых представляет собой СВВП модели «XFV-1 Сэлмон» (США) [1].
4. Авиационный комплекс вертикального взлета, включающий беспилотный тяжелый самолет-носитель (БТСН) и два буксируемых на концах крыла беспилотных легких многоцелевых самолета (БЛМС), каждый из которых имеет фюзеляж с передним размещением двигателя и два соосных тянущих винта, четырехопорное неубирающееся шасси с колесами, смонтированными в обтекателях на концах килей хвостового оперения [1], смонтированными в обтекателях на концах килей хвостового оперения [1].
Недостатками вышеперечисленных способов являются:
1. Используемая конфигурация буксировки БПЛА носителем остальных БПЛА, приводит к мощным завихрениям, сходящимся с законцовок крыльев самолета-носителя, которые вызывают сильнейшие крены БПЛА, особенно при мощных воздушных турбулентных потоках, которые приводят к раскачиванию - увеличению амплитуды колебания и к возможному разрушению конструкций всех БПЛА.
2. Во время полета практически невозможно маневрировать, особенно при больших углах атаки, кроме того, все БПЛА имеют высокий коэффициент лобового сопротивления, что приводит к повышенному потреблению топлива, к меньшему времени полета и низкой скорости.
3. Применение турбовинтовых силовых установок приводит к снижению скрытности в инфракрасном и звуковом диапазоне.
Наиболее близким к заявляемому способу по совокупности совпадающих существенных признаков является способ, который выбран в качестве прототипа [2]. Суть данного способа заключается в том, что формирование беспилотной летательной системы происходит на основе БПЛА тягача и двух функциональных БПЛА. Все БПЛА, выполнены по аэродинамической схеме «летающее крыло», где БПЛА-тягач имеет «ромбовидный» вид, а два БПЛА - «треугольный». Стыковка/расстыковка БПЛА осуществляется с помощью устройств крепления, находящихся вдоль кромок крыльев.
Недостатками такой системы доставки «функциональных» БПЛА в заданный район являются:
1. Необходим поочередный запуск БПЛА с площадок взлета, чем увеличиваются временные затраты.
2. Данный способ позволяет осуществить доставку только двух функциональных БПЛА при соблюдении схемы «аэродинамическое летающее крыло треугольного вида».
3. Отсутствует жесткая структура крепления «функциональных» БПЛА с БПЛА-тягачом, что приведет к невозможности маневрирования на больших углах атаки, а также ухудшаются устойчивость и управляемость системы.
4. БПЛА-тягач использует тянущий, а не толкающий способ полета, что значительно снижает скорость и ускорение всей системы.
5. Все БПЛА используют реактивные двигатели, которые обладают значительным топливным расходом, что снижает длительность и дальность полета. Кроме того, реактивные выхлопные струи БПЛА-тягача попадают на корпуса функциональных БПЛА, что может вызвать термическое поражение корпусов и последующее их разрушение.
6. Низкая скрытность полета. Так как в связи с применением реактивных двигателей остается тепловой след в инфракрасном диапазоне.
Цель изобретения - улучшение массогабаритных показателей системы, повышение маневренных и скоростных характеристик, увеличение числа функциональных элементов, повышение скрытности, расширение функциональности.
Указанный технический результат при осуществлении предлагаемого способа достигается тем, что в предлагаемом способе изменяется сам принцип построения беспилотной летательной системы, основанный на модульном подходе.
Суть этих изменений заключается в следующем. Малозаметная модульная беспилотная летательная системы (ММБЛС) включает пять модулей: БПЛА-носитель и четыре функциональных БПЛА. Вся конструкция формируется путем размещения четырех функциональных БПЛА на поверхности БПЛА-носителя, образуя при этом жесткую сцепную структуру на основе сервоприводов и электромагнитов. Такая конструкция позволяет значительно повысить аэродинамические показатели по скорости, маневренности и энергоэффективности электродвигателей, а выбранный способ доставки многократно увеличивает время работы каждого функционального БПЛА. На фиг.1 предвид ММБЛС с размещенными на поверхности БПЛА-носителя четырех функциональных БПЛА. Цифрами обозначены функциональные БПЛА. На фиг.2 показан вид ММБЛС сверху.
Функциональные БПЛА конструктивно выполнены по трехроторной схеме, первый БПЛА располагается в носовой, второй с нижним закрылком моторного отсека для повышения аэродинамических свойств - в центре, второй и третий расположены в хвостовой части и являются толкающими силовыми электродвигателями, повышающими скоростные и ускорительные характеристики ММБЛС, а также могут изменять вектор тяги на угол от 0 до 90 градусов, обеспечивая таким образом как вертолетный, так и самолетный режим полета. Конструкция функциональных БПЛА позволяет очень плотно (кромка одного крыла БПЛА к противоположной кромке другого) размещать их на поверхности БПЛА-носителя, создавая при этом форму «второго летающего крыла».
На фиг.3, 4, 5 изображен БПЛА-носитель, в носовой части которого конструктивно располагаются передние горизонтальные оперения 1, нейросетевая оптическая система распознавания, идентификации и классификации объектов в пространстве с обработкой изображений в видимом и инфракрасном диапазонах в углах обзора в нижней и верхней полусферах 2. В центральной части располагаются: подсистема спутниковой и инерционной навигации, подсистема связи и управления, лазерный дальномер, литий-ионные аккумуляторы и водородные топливные элементы. В хвостовой части по бокам расположены два элевона с функцией задних оперений 3, что значительно улучшает управляемость по крену и тангажу при больших углах атаки. На верхней поверхности корпуса размещается солнечная батарея 4, осуществляющая подзарядку аккумулятора, находящимся в корпусе, система стыковки/расстыковки (сервоприводы с замками и электромагниты) 5. Сзади находится мощный общий электродвигатель толкающего типа 6. Сбоку расположены воздухозаборники 7.
БПЛА-модули изготавливаются из легких композитных материалов на основе технологии 3D печати [3,4], и имеют поверхность с низкой отражательной способностью. Они также оснащены электродвигателями, что дополнительно повышает скрытность полета из-за отсутствия «теплового следа» и низкого уровня звуковых колебаний [5].
Вся конструкция в сборе имеет аэродинамическую форму «летающее крыло» прямой стреловидности с низким коэффициентом лобового сопротивления, что значительно повышает скорость полета, подъемную силу, маневренность и управляемость в полете, а также энергоэффективность отдельных функциональных БПЛА [6].
Функциональные БПЛА представляют собой трикоптер - конверто-план, имеющий трехроторную электродвигательную схему. Внешний общий вид функционального БПЛА (с различными положениями задних электродвигателей) представлен на фиг.6, 7. Для обеспечения горизонтального баланса вертолетного (вертикальный взлет и посадка) и самолетного режима полета силовая установка разделена на три точки опоры тремя воздушными электродвигателями: один (с нижним закрылком моторного отсека) 8 располагается в носовой части, два других 9 расположены в хвостовой части и являются толкающими силовыми электродвигателями для повышения скоростных и ускорительных характеристик с изменяемым вектором тяги на угол от 0 до 90 градусов, что позволяет переход от вертикального режима полета в самолетный. Совместное функционирование электродвигателей и трех хвостовых элевонов (один по центру и два по бокам) создает повышение подъемной силы, а также улучшение управляемости по крену и тангажу, особенно при больших углах атаки. В носовой части беспилотного летательного аппарата размещается нейросетевая оптическая система распознавания объектов верхнего 10 обзора. В центральной части расположены: функциональные модули, система связи, навигации и управления, лазерный дальномер, литий-ионные аккумуляторы и водородные топливные элементы. Функциональные модули могут быть различными, в зависимости от поставленной задачи. Таким образом, ММБЛС является многофункциональной системой. На верхней поверхности БПЛА имеется система подзарядки аккумуляторных батарей в виде солнечных элементов преобразования энергии 11. Система стыковки/расстыковки на основе сервоприводов с замками 12 и электромагнитов 13 располагается в БПЛА на нижней и боковой поверхности конструкции в трех точках в соответствии с треугольной конфигурацией. По бокам расположены воздуховоды 14. На фиг.8 изображен вид функционального БПЛА снизу, где расположены нижние центральный и боковые хвостовые элевоны 15, нижний закрылок колодца переднего электродвигателя 16 и нейросетевая оптическая система распознавания объектов нижнего обзора 17.
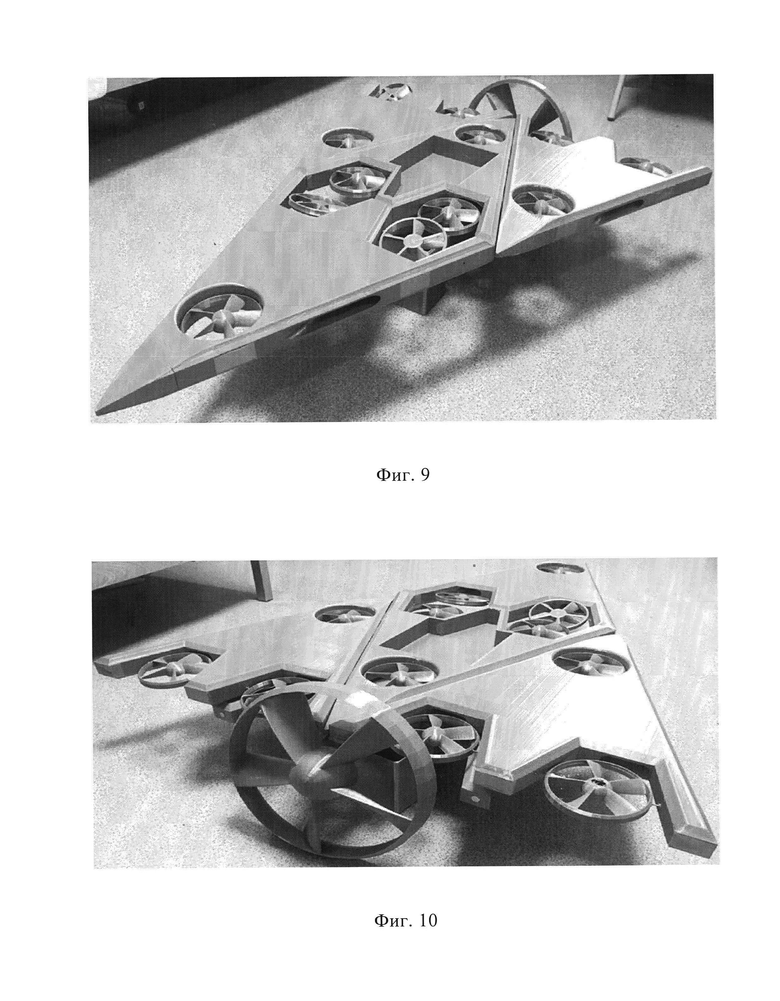
Произведено моделирование макета малозаметной модульной беспилотной летательной системы, который распечатан с применением 3D-технологий, что позволило получить эффективные массово-весовые показатели и сравнительно низкие экономические затраты. На фиг.9 приведен вид спереди, на фиг.10 - вид сзади.
Исходя из способа формирования малозаметной модульной беспилотной летательной системы варианты ее применения могут быть следующие. Четыре функциональных БПЛА плотно размещаются на верхней поверхности БПЛА-носителя и создают при этом жесткую единую конструкцию «двойного летающего крыла», за счет системы стыковки/расстыковки на основе сервоприводов и электромагнитов. Взлет малозаметной модульной беспилотной летательной системы осуществляется за счет разгона на специальной разгонной тележке по рельсовой складной дорожке, которая может размещаться на крыше мобильного транспортного средства. При наборе двигателем максимальных оборотов, достаточных для отрыва, летательный аппарат осуществляет короткий взлет, тележка при этом во время отрыва самостоятельно отсоединяется и падает на землю. Одновременно за счет механизации передних горизонтальных оперений и совмещенных задних горизонтальных оперений и элевонов создается подъемная сила и впоследствии придается горизонтальное движение.
Полет ММБЛС осуществляется с помощью одного электродвигателя повышенной мощности с воздушным винтом. Энергия для всех электродвигателей обеспечивается от литий-ионных аккумуляторов и водородных топливных элементов, размещенные в центральной части корпусов как БПЛА-носителя, так и отдельных функциональных БПЛА. Во время полета имеется возможность зарядки аккумуляторной батареи за счет солнечных батарей, находящиеся на верхней поверхности корпуса.
В режиме крейсерского полета ММБЛС спроектированная аэродинамическая форма «двойное летающее крыло» позволяет существенно улучшить маневренность летательного аппарата за счет повышения эффективности органов управления по тангажу, крену и рысканью в широком диапазоне углов атаки, а также увеличить дальность и длительность полета летательного аппарата в целом. При прибытии, в назначенный географический район, электродвигатель БПЛА-носителя снижает свои обороты и осуществляет планирование. В процессе планирования одновременно электродвигатель с вентилятором опускаются вниз на угол 45 градусов и включаются все бортовые электродвигатели функциональных БПЛА, в последующем происходит расстыковка, которая может быть в 2 вариантах либо групповая (4 БПЛА) или попарная (2 БПЛА).
Для эффективного и рационального потребления электроэнергии и уменьшения временных показателей при выполнении поставленных задач, функциональные БПЛА обладает двумя режимами работы: самолетным и вертолетным, последний позволяет зависать в воздухе и осуществлять взлет и посадку в любом сухопутном и морском географическом районе. Самолетный режим обеспечивает оперативное перемещение между соответствующими районами, при этом переход в данный режим производится путем разворота в вертикальное положение поворотных гондол с двигателями на угол от 0 до 90 градусов, в дальнейшем происходит набор соответствующей скорости и последующее отключение переднего электродвигателя и закрытие моторного отсека.
Система управления полетом БПЛА представляет собой механизацию задних двух боковых и одного центрального элевонов, автоматическое закрытие переднего моторного отсека для придания горизонтального баланса полета и повышение аэродинамических свойств, а также управление оборотами и изменением угла вектора тяги электродвигателей, что в совокупности позволят увеличить подъемную силу, повысит эффективность управления по тангажу, крену и рысканью при больших углах атаки.
Двухступенчатая система стыковки/расстыковки, включающая сервоприводы с замками и электромагниты, позволяет создавать различные соединения для широкого круга задач с другими БПЛА в пространстве, в результате чего может формироваться жесткая несущая модульная конструкция. Питание электродвигателей обеспечивается аккумуляторной батареей и водородными топливными элементами, а также восстановление энергии от солнечной батареи на верхней поверхности корпуса.
После расстыковки БПЛА-носитель может возвратиться обратно, либо возможно использование его в качестве самостоятельного функционального БПЛА. Посадка БПЛА-носителя осуществляется путем отключения электродвигателя с последующим попаданием в специальные улавливающие сети.
Предлагаемое изобретение иллюстрируются чертежами, на которых изображены:
на фиг.1 - общий вид ММБЛС с размещенными на поверхности БПЛА-носителя четырех функциональных БПЛА;
на фиг.2 - вид ММБЛС сверху;
на фиг.3 - вид сверху БПЛА-носителя;
на фиг.4 - вид сбоку БПЛА-носителя;
на фиг.5 - общий вид БПЛА-носителя;
на фиг.6 - внешний общий вид функционального БПЛА, задние электродвигатели в положении самолетного режима полета;
на фиг.7 - внешний общий вид функционального БПЛА, задние электродвигатели в положении вертолетного режима полета;
на фиг.8 - вид функционального БПЛА снизу;
на фиг.9 - вид спереди разработанного макета ММБЛС;
на фиг.10 - вид сзади разработанного макета ММБЛС.
Сопоставительный анализ предлагаемого технического решения с прототипом показывает, что предлагаемый способ отличается от известного меньшими массогабаритными показателями конструкции, улучшенными маневренными и скоростными характеристиками, увеличением числа функциональных элементов, повышением скрытности, расширением функциональности. Таким образом, заявляемый способ соответствует критерию "новизна".
Источники информации:
1. Патент RU №2582743 от 2014 г.
2. Проект «The transformers, «Future aviation concept» оборонной компании BAE System (Великобритания) (Huffingtonpost.co.uk/2014/07/09/transformers-plane-bae-systems_n5569846.html. 07.09.2014).
3. 3 ds Max 2020. Александр Горелик. Изд. БХВ-Петербург, с. 543. Санкт-Петербург. 2021 г.
4. Самоучитель Blender 2.6. Андрей Прахов. Изд. БХВ-Петербург. с. 543. Санкт-Петербург. 2015 г.
5. Аэродинамика воздушных винтов и винтокольцевых движителей. С.П. Остроухов. Изд. «Физико-математическая литература», с. 329. 2016 г.
6. Аэродинамика и компоновка маневренных дозвуковых и сверхзвуковых летательных аппаратов. С.Г. Бураго, С.А. Попов, Изд. МАИ. Москва. 2019 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЯЖЕЛЫЙ СКОРОСТНОЙ ВИНТОКРЫЛ | 2016 |
|
RU2608122C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| АВИАЦИОННЫЙ КОМПЛЕКС ВЕРТИКАЛЬНОГО ВЗЛЕТА | 2014 |
|
RU2582743C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
Изобретение относится к области авиации, в частности к беспилотным летательным аппаратам (БПЛА) и системам (БПЛС), и может быть использовано при разработке многофункциональных беспилотных летательных систем. Малозаметная модульная беспилотная летательная система (ММБЛС) формируется путем размещения на поверхности БПЛА-носителя четырех функциональных БПЛА, образуя при этом жесткую сцепную структуру на основе сервоприводов и электромагнитов. Каждый БПЛА оборудован подсистемой спутниковой и инерционной навигации, подсистемой системы связи и управления, комплексной подсистемой электропитания. Все БПЛА имеют также функциональные модули, которые могут иметь различное назначение в зависимости от выполняемых задач, что делает ММБЛС многофункциональной системой. БПЛА-модули изготавливаются из легких композитных материалов на основе технологии 3D-печати и имеют поверхность с низкой отражательной способностью. Они также оснащены электродвигателями, что дополнительно повышает скрытность полета из-за отсутствия «теплового следа» и низкого уровня звуковых колебаний. БПЛА-носитель оборудован электродвигателем повышенной мощности, что значительно расширяет радиус действия системы. Функциональные БПЛА оснащены тремя электродвигателями, два из которых имеют изменяемый вектор тяги с возможностью вертолетного и самолетного режима полета. БПЛА-носитель доставляет функциональные БПЛА в заданный район, где происходит расстыковка системы и разделение на отдельные БПЛА, которые выполняют задачу в зависимости от функционального назначения. В результате уменьшаются массогабаритные показатели конструкции, улучшаются маневренные и скоростные характеристики системы, увеличивается число функциональных элементов, повышается скрытность, расширяется функциональность. 10 ил.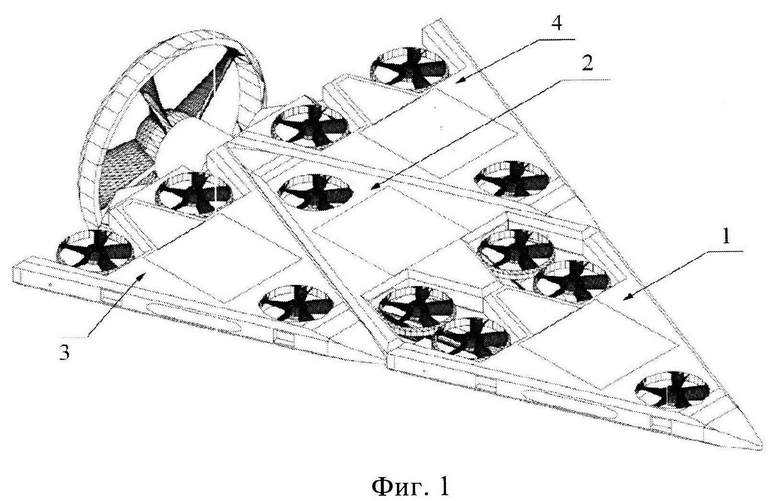
Способ формирования малозаметной модульной беспилотной летательной системы (ММБЛС), заключающийся в том, что создают группу БПЛА, включающую БПЛА-носитель и группу функциональных БПЛА, образующих с носителем единую систему, для перемещения в заданный географический район для выполнения поставленных задач, отличающийся тем, что на верхней поверхности БПЛА-носителя размещают четыре функциональных БПЛА, выполненные по схеме «летающее крыло» прямой стреловидности, которые вместе с БПЛА-носителем образуют единую жесткую сцепную конструкцию, обладающую низким уровнем коэффициента лобового сопротивления, с двухступенчатой системой стыковки/расстыковки на основе сервоприводов и электромагнитов, в качестве силовой установки БПЛА используют электродвигатели с высокими скоростными и ускорительными характеристиками, способные изменять вектор тяги на угол от 0 до 90 градусов, обеспечивающий как вертолетный, так и самолетный режим полета.
| Проект "The transformers, "Future aviation concept" оборонной компании BAE System (Великобритания), 07.09.2014 [онлайн] [найдено 23.08.2024] | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 20220355932 A1, 10.11.2022 | |||
| US 11643207 B1, 09.05.2023 | |||
| ТРАНСПОРТНОЕ СРЕДСТВО, ТРАНСПОРТНАЯ СИСТЕМА (ВАРИАНТЫ) И СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2789564C1 |
| FR | |||

