Изобретение относится к области авиации, в частности к беспилотным летательным аппаратам (БПЛА), и может быть использовано при разработке конструкций БПЛА с использованием аэродинамической схемы «летающее крыло», которые могут найти широкое применение, в частности, при мониторинге земной и водной поверхности, грузоперевозках, разведке, поиске, в условиях чрезвычайных ситуаций для обеспечения эффективного управления и получения оперативной информации.
Известен беспилотный летательный аппарат (патент RU №107126 от 2011 г.), включающий фюзеляж, крыло с органами управления, двигатель и винт, крыло выполнено из условия использования аэродинамической схемы «летающее крыло», при этом фюзеляж расположен в носовой части БПЛА в контакте с передней кромкой крыла, а двигатель - в хвостовой части БПЛА в контакте с задней кромкой крыла.
Недостатком этого устройства является наличие фюзеляжа, как элемента, не участвующего в создании подъемной силы, при этом фюзеляж создает дополнительные потери на трение - увеличивает лобовое сопротивление летательного аппарата, что ухудшает взлетно-посадочные характеристики БПЛА (увеличивает длину разбега). Использование толкающего винта обуславливает необходимость высокоточной балансировки аппарата.
Наиболее близкой по технической сущности к заявленному изобретению является беспилотный летательный аппарат короткого взлета и посадки (патент RU №2606216 от 2015 г.), содержащий крыло прямой стреловидности, выполненное из условия использования аэродинамической схемы «летающее крыло», силовую установку, включающую двигатель с воздушным винтом, и органы управления, крыло в носовой части оснащено силовой установкой и органами управления, выполненными в виде переднего горизонтального оперения и переднего вертикального оперения, при этом силовая установка, переднее горизонтальное оперение и переднее вертикальное оперение размещены над верхней поверхностью крыла на опоре с возможностью обдува воздушным винтом верхней поверхности крыла и органов управления.
Недостатком этого устройства является то что, при выполнение короткого взлета и посадки, осуществляемых на больших углах атаки, уменьшается скорость летательного аппарата и ухудшаются характеристики его маневренности - устойчивости и управляемости. Для удержания летательного аппарата на наименьшей скорости требуется наибольшее значение подъемной силы. Однако увеличение коэффициента подъемной силы путем увеличения угла атаки возможно только до критического значения угла атаки. Увеличение угла атаки свыше критического приводит к срыву потока на верхней поверхности крыла и к резкому уменьшению коэффициента подъемной силы, что недопустимо.
Задачей изобретения является создание конструкции беспилотного летательного аппарата, которая обеспечит возможность повышения подъемной силы, повышения маневренности и управляемости в полете летательного аппарата, возможности использования в полете экранного эффекта, возможностью длительного нахождения в воздухе и совершение длительных перелетов с применением электродвигателей и пополнения запасов электроэнергии в полете, возможностью доставки различных видов полезной нагрузки в заданную точку маршрута.
Требуемый технический результат достигается тем, что многоцелевой беспилотный летательный аппарат, содержит крыло прямой стреловидности, выполненное по схеме «летающее крыло» (3), силовую установку с воздушным винтом (9), носовая часть беспилотного летательного аппарата приподнята над поверхностью корпуса, на ней расположено горизонтальное крыло (2), имеющее горизонтальное оперение, на законцовках которого в поворотных гондолах (1) располагаются два электродвигателя с воздушным винтом, в носовой части расположена система спутниковой связи и навигации GPS/ГЛОНАСС (7), система управления, приборы оптического наблюдения (8) в видимом и инфракрасном диапазонах, в нижней и верхней полусфере, малогабаритная РЛС (9), лазерный дальномер, в хвостовой части корпуса расположены два наклонных киля (6) с вертикальным оперением, верхняя поверхность корпуса представляет собой солнечную батарею (5), соединенную с аккумулятором находящимся в корпусе беспилотного летательного аппарата, там же находится закрытый грузовой отсек (4), внизу корпус снабжен многоколесными не убираемыми шасси (11) защищенными обтекателями (10).
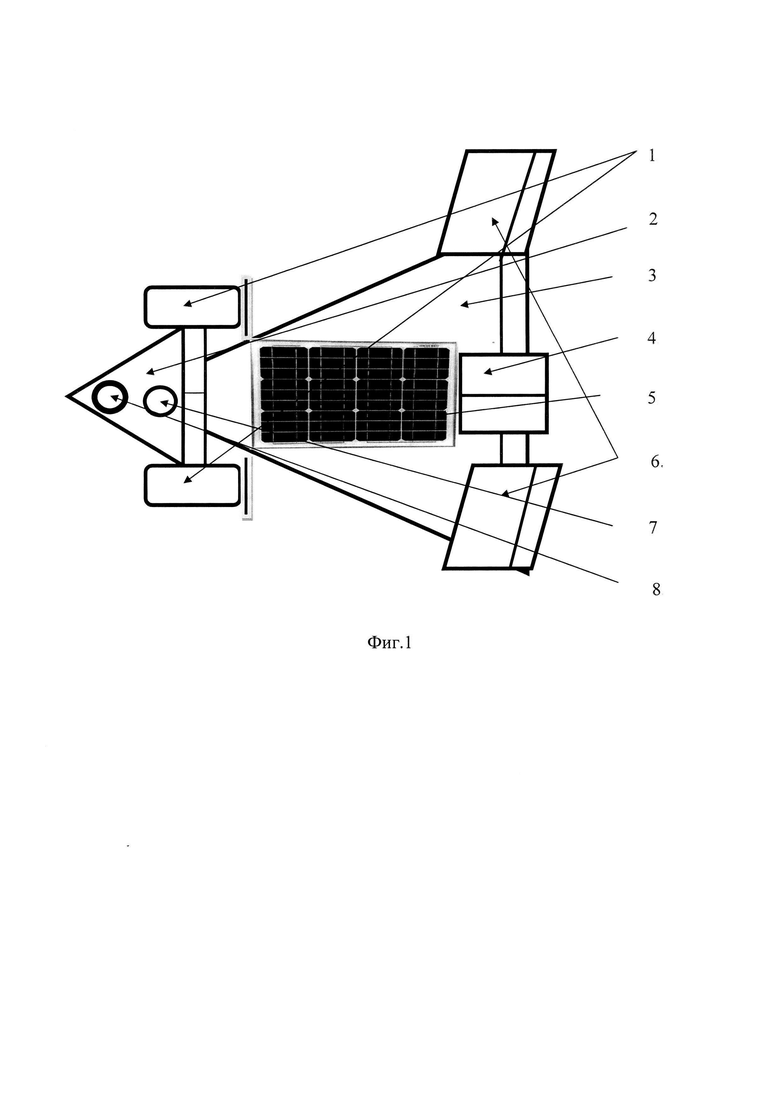
Сущность изобретения поясняется чертежом, где на Фиг. 1 представлен многоцелевой беспилотный летательный аппарат, включающий в свой состав:
1 - поворотные гондолы с двигателями;
2 - горизонтальное крыло;
3 - корпус крыла;
4 - грузовой отсек;
5 - солнечная батарея;
6 - наклонный киль;
7 - система спутниковой связи и навигации GPS/ГЛОНАСС;
8 - приборы оптического наблюдения.
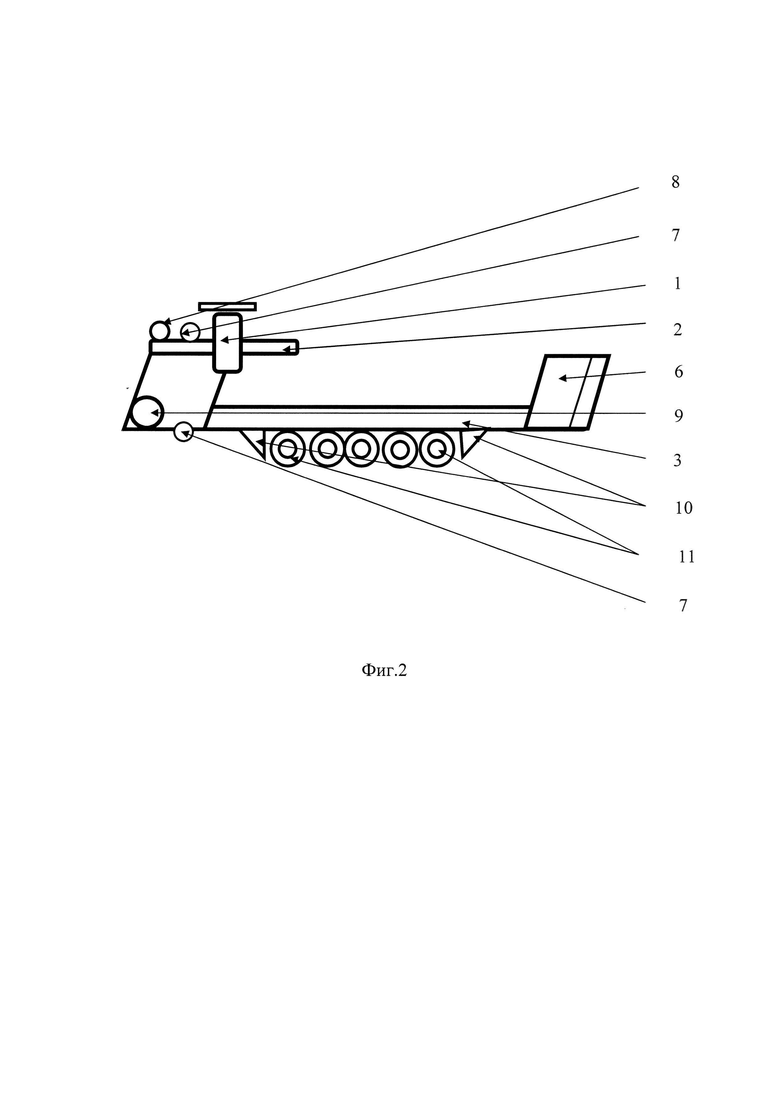
На Фиг. 2 представлен вид справа на многоцелевой беспилотный летательный аппарат, где:
1 - поворотные гондолы с двигателями;
2 - горизонтальное крыло;
3 - корпус крыла;
6 - наклонный киль;
7 - система спутниковой связи и навигации GPS/ГЛОНАСС;
8 - приборы оптического наблюдения;
9 - малогабаритная РЛС;
10 - обтекатели шасси;
11 - многоколесные не убираемые шасси.
Изобретение работает следующим образом: взлет многоцелевого беспилотного летательного аппарата осуществляется за счет разворота в вертикальное положение поворотных гондол с двигателями (1) на взлетном режиме двигателя. При наборе двигателями мощности достаточной для отрыва, летательный аппарат осуществляет взлет в вертикальном положении. Далее за счет поворота гондол с двигателями (1) и механизации крыла придается горизонтальное движение, создается дополнительная подъемная сила от перепада давлений на верхней и нижней поверхности крыла за счет обдува воздушным винтом верхней поверхности крыла.
Такой взлет осуществляется при отсутствии взлетно-посадочных полос достаточной протяженности. При наличии взлетно-посадочных полос взлет осуществляется с разбегом при горизонтальном расположении поворотных гондол с двигателями (1) для экономии заряда аккумуляторных батарей. В режиме крейсерского полета обдув верхней поверхности крыла и органов управления позволяет существенно улучшить маневренность летательного аппарата за счет повышения эффективности органов управления по тангажу, крену и рысканью в широком диапазоне углов атаки.
В процессе полета существует возможность придания многоцелевому беспилотному летательному аппарату, в зависимости от решаемых задач, различных параметров движения. Высоту и скорость полета для эффективного применения средств наблюдения, поражения и осуществления полета до выполнения задачи или исчерпания энергетических ресурсов. Для увеличения дальности и длительности полета летательный аппарат выполненный по схеме «летающее крыло» может использовать экранный эффект - эффект резкого увеличения подъемной силы крыла и других аэродинамических характеристик летательного аппарата при полете вблизи экранирующей поверхности (воды, земли и др.)
Посадка с коротким пробегом осуществляется за счет поворота поворотных гондол с двигателями (1) в вертикальное положение и уменьшения оборотов двигателей. Наличие многоколесных неубираемых шасси (11) защищенных обтекателями (10) позволяют осуществлять посадку, как на обычные, так и заснеженные площадки и воду. При посадке на снег многоколесные не убираемые шасси (11) работают как лыжи, а от механического повреждения защищены обтекателями (10). При посадке на воду многоколесные не убираемые шасси (11) работают как дополнительные поплавки.
В процессе полета многоцелевого беспилотного летательного аппарата имеется возможность осуществления визуального наблюдения по маршруту полета с помощью приборов оптического наблюдения (8) в видимом и инфракрасном диапазонах, в нижней и верхней полусфере, радиолокационного наблюдения малогабаритной РЛС (9), определением дальности до обнаруженных объектов с помощью лазерного дальномера. Изображение обнаруженных объектов и их координаты через систему спутниковой связи и навигации GPS/ГЛОНАСС (7) передаются на пункт управления, который через систему управления управляет параметрами полета и применением полезной нагрузки, размещаемой в закрытом грузовом отсеке (4). В качестве полезной нагрузки могут выступать средства поражения, различные виды малогабаритных боеприпасов, средства обнаружения, сбрасываемые датчики, гидроакустические буи и т.п., средства постановки пассивных и сбрасываемые станции активных помех и другие известные средства.
Полет летательного аппарата осуществляется с помощью двух электродвигателей с воздушным винтом. Питание электродвигателей осуществляется от солнечной батареи (5) на верхней поверхности корпуса и аккумуляторной батареи, находящейся в корпусе беспилотного летательного аппарата. Во время полета имеется возможность зарядки аккумуляторной батареи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ МАЛОЗАМЕТНОЙ МОДУЛЬНОЙ БЕСПИЛОТНОЙ ЛЕТАТЕЛЬНОЙ СИСТЕМЫ | 2023 |
|
RU2829915C1 |
| Энергонезависимый многоцелевой беспилотный летательный аппарат | 2020 |
|
RU2741825C1 |
| БЕСПИЛОТНЫЙ УДАРНО-РАЗВЕДЫВАТЕЛЬНЫЙ АВИАНОСИТЕЛЬ | 2023 |
|
RU2829114C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| Многоцелевой комбинированный беспилотный летательный аппарат | 2024 |
|
RU2831435C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2485018C1 |
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС ДЛЯ ПРОТИВОДЕЙСТВИЯ МИКРО- И МИНИ-БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТАМ ПРОТИВНИКА | 2021 |
|
RU2802236C2 |
| УДАРНЫЙ АВИАЦИОННЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2022 |
|
RU2810821C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| ВЫСОКОСКОРОСТНОЙ БЕСПИЛОТНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2464203C2 |
Изобретение относится к области авиации, в частности к беспилотным летательным аппаратам (БПЛА), и может быть использовано при разработке конструкций БПЛА с использованием аэродинамической схемы «летающее крыло». Носовая часть БПЛА приподнята над поверхностью корпуса, на ней расположено горизонтальное крыло, имеющее оперение, на законцовках которого в поворотных гондолах располагаются два двигателя. В носовой части расположена система спутниковой навигации, система связи и управления, приборы оптического наблюдения в видимом и инфракрасном диапазонах, в нижней и верхней полусферах, малогабаритная РЛС, лазерный дальномер. В хвостовой части расположены два наклонных киля с вертикальным оперением. Верхняя поверхность корпуса представляет собой солнечную батарею, соединенную с аккумулятором, находящимся в корпусе, там же находится закрытый грузовой отсек. Внизу корпус снабжен многоколесными неубираемыми шасси. Повышается подъемная сила, маневренность и управляемость в полете. Обеспечивается возможность использования в полете экранного эффекта, длительного нахождения в воздухе и пополнения запасов электроэнергии в полете. 2 ил.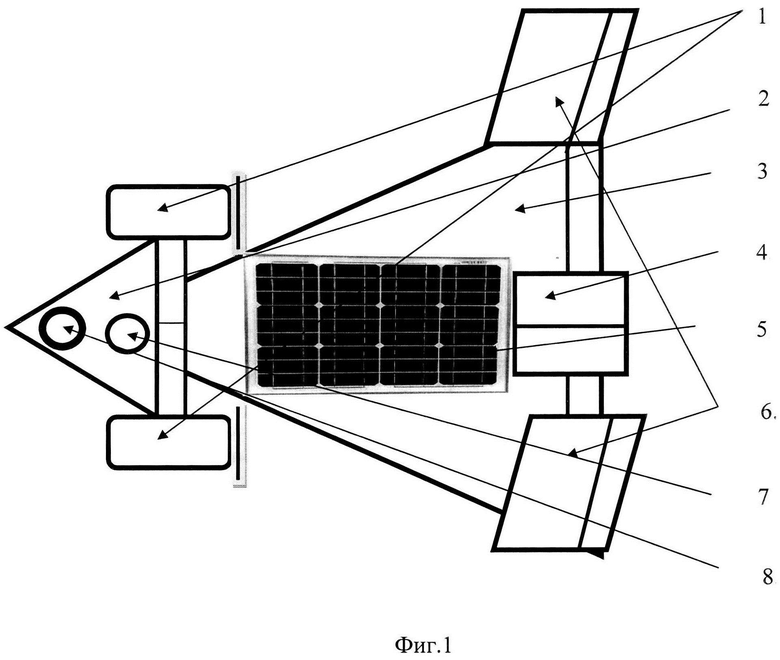
Многоцелевой беспилотный летательный аппарат, содержащий крыло прямой стреловидности, выполненное по схеме «летающее крыло», силовую установку с воздушным винтом, отличающийся тем, что носовая часть беспилотного летательного аппарата приподнята над поверхностью корпуса, на ней расположено горизонтальное крыло, имеющее оперение, на законцовках которого в поворотных гондолах располагаются два двигателя, в носовой части расположена система спутниковой навигации GPS/ГЛОНАСС, система связи и управления, приборы оптического наблюдения в видимом и инфракрасном диапазонах, в нижней и верхней полусферах, малогабаритная РЛС, лазерный дальномер, в хвостовой части корпуса расположены два наклонных киля с вертикальным оперением, верхняя поверхность корпуса представляет собой солнечную батарею, соединенную с аккумулятором, находящимся в корпусе беспилотного летательного аппарата, там же находится закрытый грузовой отсек, внизу корпус снабжен многоколесными неубираемыми шасси.
| СПОСОБ РЕГИСТРАЦИИ ТЕКУЩЕГО ЗНАЧЕНИЯ СТАТИСТИЧЕСКОЙ ВЕРОЯТНОСТИ ПОЯВЛЕНИЯ СЛУЧАЙНОЙ КОМБИНАЦИИ НА ВБ1ХОДЕ ДАТЧИКА СЛУЧАЙНЫХ ЧИСЕЛ | 0 |
|
SU199511A1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ (ВАРИАНТЫ) | 2015 |
|
RU2613629C2 |
| БЕСПИЛОТНЫЙ САМОЛЕТ-ВЕРТОЛЕТ-РАКЕТОНОСЕЦ | 2019 |
|
RU2708782C1 |
| US 20170203839 A1, 20.07.2017 | |||
| US 20070034739 A1, 15.02.2007 | |||
| WO 2017163157 A1, 28.09.2017. | |||

