Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных системах для выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами.
Известно радиолокационное устройство для обнаружения движущейся цели [1], содержащее последовательно включенные блоки задержки, перемножитель комплексных чисел и вычитатель. Однако это устройство обладает низкой эффективностью выделения сигнала движущейся цели.
Другим известным устройством является корреляционный автокомпенсатор [2], который содержит ряд блоков задержки, два перемножителя, сумматор и блок оценки параметров коррелированной помехи. Недостатком этого устройства является плохое подавление кромок протяженной помехи из-за большой постоянной времени цепи адаптивной обратной связи.
Наиболее близкое к данному изобретению цифровое устройство для подавления пассивных помех [3], выбранное в качестве прототипа, содержит весовой блок, комплексный сумматор и блоки задержки. Однако данное устройство имеет потери в эффективности компенсации помех.
Задачей, решаемой в изобретении, является повышение эффективности компенсации пассивной помехи и выделения сигналов движущихся целей при обработке сигналов от цели на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
Для решения поставленной задачи в фильтр компенсации помех, содержащий весовой блок, первый блок задержки, первый и второй комплексные сумматоры, второй блок задержки и синхрогенератор, введены третий и четвертый блоки задержки и вычислитель весового коэффициентов, соединенные между собой определенным образом.
Сущность изобретения как технического решения характеризуется совокупностью существенных признаков, изложенных в формуле изобретения и обеспечивающих решение поставленной задачи путем оптимальной и согласованной обработки поступающих импульсов.
Технический результат изобретения состоит в повышении эффективности компенсации пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей.
На фиг. 1 представлена структурная электрическая схема фильтра компенсации помех; на фиг. 2 - весового блока; на фиг. 3 - блока задержки; на фиг. 4 - комплексного сумматора; на фиг. 5 - вычислителя весового коэффициента; на фиг. 6 - накопителя.
Фильтр компенсации помех (фиг. 1) содержит весовой блок 1, блоки 2, 4, 7, 8 задержки, комплексные сумматоры 3, 5, синхрогенератор 6 и вычислитель 9 весового коэффициента.
Весовой блок 1 (фиг. 2) содержит два перемножителя 10; блоки 2, 4, 7, 8 задержки (фиг. 3) содержат две линии 11 задержки; комплексные сумматоры 3, 5 (фиг. 4) содержат два сумматора 12; вычислитель 9 весового коэффициента (фиг. 5) содержит четыре перемножителя 13, сумматор 14, два накопителя 15, делитель 16, блок 17 объединения, линию 18 задержки, блок 19 извлечения квадратного корня и блок 20 памяти; накопитель 15 (фиг. 6) содержат n элементов 21 задержки на интервал tд и n сумматоров 22.
Фильтр компенсации помех может быть осуществлен следующим образом.
Последовательность когерентных радиоимпульсов, состоящих из сигнала от движущейся цели и пассивной помехи, значительно превышающей сигнал, представлена цифровыми кодами (xjl, уjl) входных квадратурных проекций, следующих через период повторения Т в каждом (1-м) элементе разрешения по дальности (кольце дальности) каждого (j-го) периода повторения.
Цифровые отсчеты в заявляемом устройстве (фиг. 1) поступают на соединенные входы третьего блока 7 задержки (фиг. 3) на интервал τ и первые входы вычислителя 9 весового коэффициента (фиг. 5). На вторые входы вычислителя 9 весового коэффициента поступают отсчеты с выхода первого блока задержки на интервал Т - τ. Отсчеты на первых и вторых входах вычислителя 9 весового коэффициента разделены на интервал Т.
В вычислителе 9 осуществляется перемножение задержанных и незадержанных одноименных проекций с последующим суммированием полученных произведений в сумматоре 15. В блоке 17 объединения вычисляется сумма квадратов проекций. В накопителях 15 (фиг. 6) с помощью элементов 21 задержки и сумматоров 22 осуществляется скользящее вдоль дальности в каждом периоде повторения суммирование поступающих отсчетов с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером n/2+1, для чего выходные величины элемента 21 задержки с номером n/2 поступают только на последующий элемент 21 задержки. В результате накопления на первом входе делителя 16 образуется величина
где j - номер текущего периода, l - номер текущего кольца дальности, n - объем обучающей выборки, определяемый числом отсчетов со смежных элементов разрешения по дальности, за исключением среднего отсчета с номером l=n/2+1.
В блоке 19 извлечения квадратного корня с учетом предыдущих операций в блоках 17, 15, 18 и 13 вычисляется поступающая на второй вход делителя 16 величина
b=(c1c2)1/2,
где

На выходе делителя 16 образуется оценка действительной части комплексного коэффициента корреляции  в виде
в виде

где  - оценка коэффициента межпериодной корреляции,
- оценка коэффициента межпериодной корреляции,  - оценка доплеровского сдвига фазы за период повторения Т.
- оценка доплеровского сдвига фазы за период повторения Т.
В результате перемножения оценки  с хранимым в блоке 20 памяти множителем « - 2 » образуется весовой коэффициент
с хранимым в блоке 20 памяти множителем « - 2 » образуется весовой коэффициент

поступающий на второй вход весового блока 1 (фиг. 2).
Четвертый блок 8 задержки на интервал τ совместно с первым блоком 2 задержки на интервал T - τ образуют результирующую задержку на интервал, равный периоду повторения Т. Во втором блоке 4 задержки осуществляется задержка на интервал Т. В результате на входы комплексных сумматоров 3 и 5 отсчеты поступают синхронно, образуя на выходе комплексного сумматора 5 отсчеты остатков скомпенсированной помехи в виде

где Ukl=xkl+iykl.
Весовой коэффициент  учитывает коэффициент корреляции помехи
учитывает коэффициент корреляции помехи  и ее доплеровский сдвиг фазы
и ее доплеровский сдвиг фазы  что повышает эффективность компенсации помехи.
что повышает эффективность компенсации помехи.
Введение третьего блоке 7 задержки входных отсчетов на интервал τ обеспечивает вычисление оценок и весового коэффициента  для среднего элемента обучающей выборки, исключенному в накопителях 15 (фиг. 6). Величина τ определяется выражением τ=tв+ntд/2,
для среднего элемента обучающей выборки, исключенному в накопителях 15 (фиг. 6). Величина τ определяется выражением τ=tв+ntд/2,
где tв - время вычисления весового коэффициента  n - количество элементов обучающей выборки, tд - интервал (период) временной дискретизации.
n - количество элементов обучающей выборки, tд - интервал (период) временной дискретизации.
При этом достигается соответствие вводимого в весовой блок 1 весового коэффициента  среднему элементу, исключенному из обучающей выборки. Тогда в случае сигнала, соизмеримого по величине с помехой, или разрывной помехи при компенсации отсчетов помехи с элемента разрешения, содержащего сигнал, исключается возможность ослабления или подавления сигнала за счет его влияния на используемые оценки. Кроме того, уменьшаются ошибки за счет рассогласования оцениваемых и действительных корреляционных свойств помехи.
среднему элементу, исключенному из обучающей выборки. Тогда в случае сигнала, соизмеримого по величине с помехой, или разрывной помехи при компенсации отсчетов помехи с элемента разрешения, содержащего сигнал, исключается возможность ослабления или подавления сигнала за счет его влияния на используемые оценки. Кроме того, уменьшаются ошибки за счет рассогласования оцениваемых и действительных корреляционных свойств помехи.
Адаптивная обработка осуществляется для среднего элемента обучающей выборки, исключенного в накопителях 15 (фиг. 6) в соответствии с алгоритмами вычисления оценки  и не влияющего на получаемую оценку
и не влияющего на получаемую оценку 
Синхронизация фильтра компенсации помех осуществляется подачей на все блоки заявляемого устройства последовательности синхронизирующих импульсов от синхрогенератора 6 (фиг. 1). Период повторения синхронизирующих импульсов равен интервалу временнóй дискретизации fд, выбираемому из условия требуемой разрешающей способности по дальности.
Достигаемый технический результат состоит в следующем. Вычисляемые оценки параметров помехи используются при взвешивании ее отсчетов, соответствующих среднему элементу обучающей выборки, что уменьшает рассогласования между получаемыми усреднением отсчетов обучающей выборки оценками и реальными свойствами помехи. Исключение среднего элемента из обучающей выборки позволяет исключить возможное влияние сигнала на эффективность компенсации помехи.
Таким образом, фильтр компенсации помех позволяет повысить эффективность подавления пассивной помехи и выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
Источники информации
1. Патент № 63-49193 (Япония), МПК G01S 13/52. Радиолокационное устройство для обнаружения движущейся цели / К.К. Тосиба. Опубл. 03.10.1988. - Изобретения стран мира. - 1989. - Выпуск 109. - № 15. - С. 52.
2. Радиоэлектронные системы: основы построения и теория. Справочник / Я.Д. Ширман, С.Т. Багдасарян, А.С. Маляренко, Д.И. Леховицкий [и др.]; под ред. Я.Д. Ширмана. - 2-е изд., перераб. и доп. - М.: Радиотехника, 2007; с. 439, рис. 25.22.
3. АС № 743208 СССР, МПК G01S 7/36. Цифровое устройство для подавления пассивных помех / Д.И. Попов. - № 2540079 / 09; заявл. 03.11.1977; опубл. 25.06.1980. Бюл. № 23. - 4 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬ-КОМПЕНСАТОР ПАССИВНЫХ ПОМЕХ | 2021 |
|
RU2760961C1 |
| ФИЛЬТР РЕЖЕКЦИИ ПАССИВНЫХ ПОМЕХ | 2021 |
|
RU2765852C1 |
| ФИЛЬТР КОМПЕНСАЦИИ ПОМЕХ | 2024 |
|
RU2834699C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2021 |
|
RU2759150C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2024 |
|
RU2825253C1 |
| ФИЛЬТР ПОДАВЛЕНИЯ ПОМЕХ | 2024 |
|
RU2835058C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКЦИИ ПОМЕХ | 2021 |
|
RU2764874C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ | 2021 |
|
RU2755978C1 |
| ФИЛЬТР РЕЖЕКЦИИ ПОМЕХ | 2024 |
|
RU2837274C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2024 |
|
RU2835120C1 |

Использование: изобретение относится к радиолокационной технике и предназначено для выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами. Сущность: фильтр компенсации помех содержит весовой блок, первый и второй комплексные сумматоры, первый, второй, третий и четвертый блоки задержки, вычислитель весового коэффициента и синхрогенератор, определенным образом соединенные между собой и осуществляющие адаптивную когерентную обработку исходных цифровых отсчетов. Технический результат: повышение эффективности выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами. 6 ил.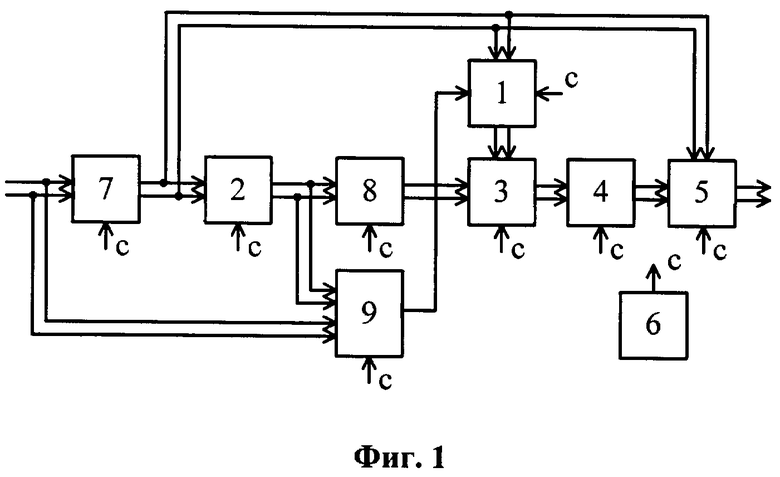
Фильтр компенсации помех, содержащий весовой блок, первый блок задержки, первый комплексный сумматор, второй блок задержки, второй комплексный сумматор и синхрогенератор, при этом входы первого блока задержки соединены с первыми входами весового блока и первыми входами второго комплексного сумматора, выходы весового блока соединены с первыми входами первого комплексного сумматора, выходы которого соединены с входами второго блока задержки, выходы которого соединены с вторыми входами второго комплексного сумматора, выход синхрогенератора соединен с синхровходами весового блока, первого блока задержки, первого комплексного сумматора, второго блока задержки и второго комплексного сумматора, отличающийся тем, что введены третий блок задержки, четвертый блок задержки и вычислитель весового коэффициента, при этом входы третьего блока задержки соединены с первыми входами вычислителя весового коэффициента, выходы третьего блока задержки соединены с входами первого блока задержки, выходы которого соединены с входами четвертого блока задержки и вторыми входами вычислителя весового коэффициента, выход которого соединен с вторым входом весового блока, выходы четвертого блока задержки соединены с вторыми входами первого комплексного сумматора, выход синхрогенератора соединен с синхровходами третьего блока задержки, четвертого блока задержки и вычислителя весового коэффициента, причем входами фильтра компенсации помех являются соединенные входы третьего блока задержки и первые входы вычислителя весового коэффициента, а выходами – выходы второго комплексного сумматора.
| 0 |
|
SU184016A1 | |
| ФИЛЬТР РЕЖЕКЦИИ ПОМЕХ | 2017 |
|
RU2660803C1 |
| ВЫЧИСЛИТЕЛЬ ДОПЛЕРОВСКОЙ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА | 2016 |
|
RU2629642C1 |
| ФЛОТАЦИОННАЯ МАШИНА | 0 |
|
SU182620A1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2016 |
|
RU2628904C1 |
| ФИЛЬТР РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2016 |
|
RU2642418C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХ В РЕАЛЬНОМ ВРЕМЕНИ | 2002 |
|
RU2271066C2 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОГО ПОДАВЛЕНИЯ ПОМЕХ | 1990 |
|
SU1802616A1 |
| ФИЛЬТР КОМПЕНСАЦИИ ПАССИВНЫХ ПОМЕХ | 2017 |
|
RU2674467C1 |

