Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных системах для выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами.
Известно радиолокационное устройство для обнаружения движущейся цели [патент Японии №63-49193, МПК G01S 13/52], содержащее последовательно включенные блоки задержки, перемножитель комплексных чисел и вычитатель. Однако это устройство обладает низкой эффективностью выделения сигнала движущейся цели.
Наиболее близкий к данному изобретению режекторный фильтр [патент RU №2786410, МПК Н03Н 7/12, G01S 7/36], выбранный в качестве прототипа, содержит блоки задержки, комплексный сумматор, комплексный перемножитель и измеритель доплеровской фазы. Однако данное устройство имеет потери в эффективности подавления помех.
Задачей, решаемой в изобретении, является повышение эффективности подавления пассивной помехи и выделения сигналов движущихся целей при обработке сигналов от цели на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
Для решения поставленной задачи в фильтр подавления помех, содержащий первый, второй и третий блоки задержки, комплексный сумматор, комплексный перемножитель, измеритель доплеровской фазы и синхрогенератор, введены вычислитель весового коэффициента и весовой блок, соединенные между собой определенным образом.
Сущность изобретения как технического решения характеризуется совокупностью существенных признаков, изложенных в формуле изобретения и обеспечивающих решение поставленной задачи путем адаптивной обработки поступающих импульсов.
Технический результат изобретения состоит в повышении эффективности подавления пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей.
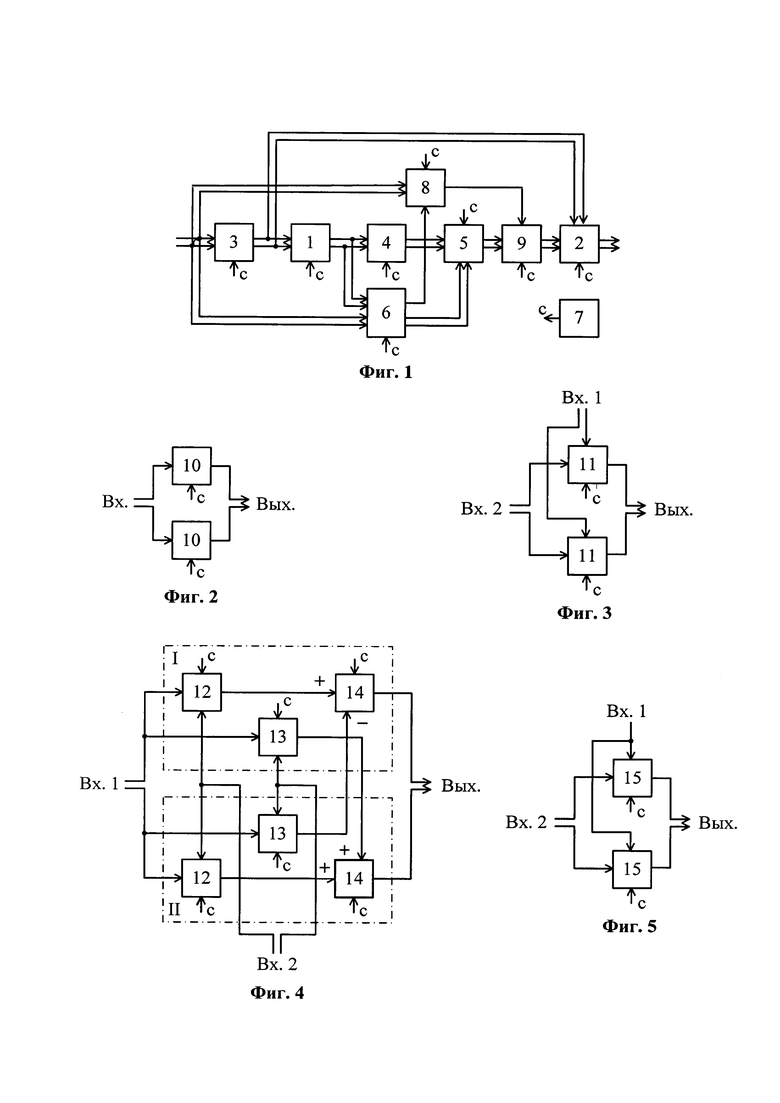
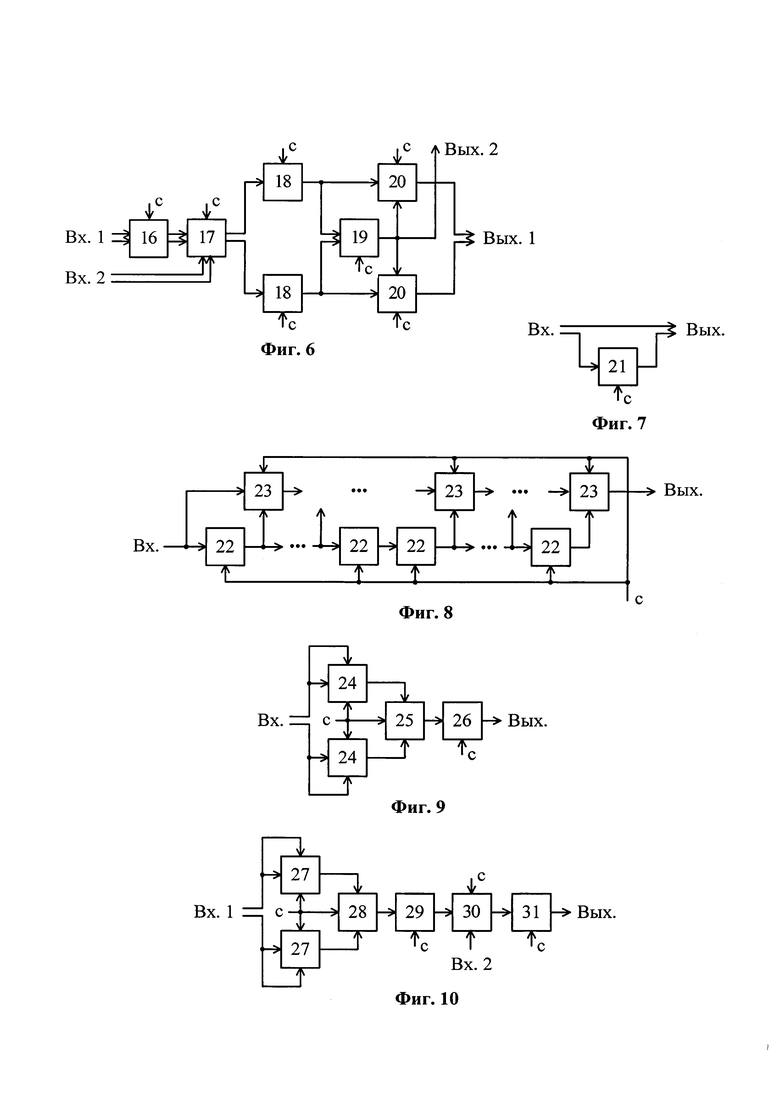
На фиг. 1 представлена структурная электрическая схема фильтра подавления помех; на фиг. 2 - блока задержки; на фиг. 3 - комплексного сумматора; на фиг. 4 - комплексного перемножителя; на фиг. 5 - весового блока; на фиг. 6 - измерителя доплеровской фазы; на фиг. 7 - блока комплексного сопряжения; на фиг. 8 - накопителя; на фиг. 9 - блока вычисления модуля; на фиг. 10 - вычислителя весового коэффициента.
Фильтр подавления помех (фиг. 1) содержит, блоки 1, 3, 4 задержки, комплексный сумматор 2, первый комплексный перемножитель 5, измеритель 6 доплеровской фазы; синхрогенератор 7; вычислитель 8 весового коэффициента и весовой блок 9.
Блоки 1, 3, 4 задержки (фиг. 2) содержат две линии 10 задержки; комплексный сумматор 2 (фиг. 3) содержит два сумматора 11; первый и второй комплексные перемножители 5, 17 (фиг. 4) содержат два канала (I, II), каждый из которых содержит первый и второй перемножители 12, 13 и сумматор 14; весовой блок 9 (фиг. 5) содержит два перемножителя 15; измеритель 6 доплеровской фазы (фиг. 6) содержит блок 16 комплексного сопряжения, второй комплексный перемножитель 17 (фиг. 4), два накопителя 18, блок 19 вычисления модуля и два делителя 20; блок 16 комплексного сопряжения (фиг. 7) содержит инвертор знака 21; каждый накопитель 18 (фиг. 8) содержит n элементов 22 задержки на интервал tд и n сумматоров 23; блок 19 вычисления модуля (фиг. 9) содержит два квадратора 24, сумматор 25 и блок 26 извлечения квадратного корня; вычислитель 8 весового коэффициента (фиг. 10) содержит два квадратора 27, сумматор 28, накопитель 29 (фиг. 8), делитель 30 и инвертор знака 31.
Фильтр подавления помех может быть осуществлен следующим образом.
Поступающие на вход заявляемого устройства (фиг. 1) цифровые отсчеты (xkl, ykl) следуют через период повторения T и в каждом элементе разрешения по дальности (кольце дальности) каждого периода повторения образуют последовательность комплексных чисел.
Ukl=xkl+iykl=|Ukl|ехр(ikϕl),
где k - номер текущего периода, l - номер текущего кольца дальности, ϕl - доплеровский сдвиг фазы за период повторения (доплеровская фаза), обычно помехи, ввиду ее значительного превышения над сигналом.
Цифровые отсчеты в заявляемом устройстве (фиг. 1) поступают на соединенные входы второго блока 3 задержки на интервал τ, вторые входы измерителя 6 доплеровской фазы и первые входы вычислителя 8 весового коэффициента. На первые входы измерителя 6 доплеровской фазы поступают отсчеты с выхода первого блока 1 задержки на интервал Т-τ. Отсчеты на первых и вторых входах измерителя 6 доплеровской фазы разделены на интервал Т.
Отсчеты с выхода второго блока 3 задержки поступают на первые входы комплексного сумматора 2 и на входы первого блока 1 задержки, с выхода которого отсчеты поступают в каскадно соединенные третий блок 4 задержки, первый комплексный перемножитель 5, весовой блок 9 и комплексный сумматор 2, выходы которого являются выходами заявляемого устройства.
В инверторе знака 21 (фиг. 7) блока 16 комплексного сопряжения измерителя 6 (фиг. 6) происходит инвертирование знака мнимых проекций задержанных отсчетов. Во втором комплексном перемножителе 17 происходит перемножение комплексных чисел, реализуемое путем операций с проекциями этих чисел в соответствии с фиг. 4 и приводящее к образованию величин

В накопителях 18 (фиг. 6) с помощью элементов 22 задержки и сумматоров 23 (фиг. 8) осуществляется скользящее вдоль дальности в каждом периоде повторения суммирование проекций ReXkl и ImXkl с n+1 смежных элементов разрешения по дальности временного строба, кроме элемента с номером n/2+1, для чего выходные величины элемента 22 задержки с номером n/2 поступают только на последующий элемент 22 задержки (фиг. 8). В результате накопления образуются величины

где  - оценка доплеровского сдвига фазы помехи за период повторения Т, усредненная по n смежным элементам разрешения по дальности.
- оценка доплеровского сдвига фазы помехи за период повторения Т, усредненная по n смежным элементам разрешения по дальности.
В блоке 19 вычисления модуля (фиг. 9) определяются величины  а затем на выходах делителей 20 (фиг. 6) - величины
а затем на выходах делителей 20 (фиг. 6) - величины  поступающие на вторые входы первого комплексного перемножителя 5. Накопление n отсчетов обеспечивает высокоточное измерение величины
поступающие на вторые входы первого комплексного перемножителя 5. Накопление n отсчетов обеспечивает высокоточное измерение величины 
С помощью квадраторов 27, сумматора 28, накопителя 29 и делителя 30 (фиг. 10) по величине |Yk|, поступающей от измерителя 6 доплеровской фазы, и по входным отсчетам Ukl определяется оценка коэффициента корреляции помехи  , по которой в инверторе знака 31 находится весовой коэффициент
, по которой в инверторе знака 31 находится весовой коэффициент

Первый блок 1 задержки на интервал Т - τ совместно с третьим блоком 4 задержки на интервал τ образуют результирующую задержку на интервал Т. В результате на входы комплексного сумматора 2 отсчеты поступают синхронно. С учетом комплексного перемножения с величиной  и взвешивания задержанных отсчетов весовым коэффициентом α от вычислителя 8 в весовом блоке 9 в результате синфазных суммирований в комплексном сумматоре 2 на его выходе вычисляются отсчеты остатков помехи
и взвешивания задержанных отсчетов весовым коэффициентом α от вычислителя 8 в весовом блоке 9 в результате синфазных суммирований в комплексном сумматоре 2 на его выходе вычисляются отсчеты остатков помехи

Двумерный поворот задержанных отсчетов в первом комплексном перемножителе 5 на угол ϕ обеспечивает необходимую для компенсации помехи синфазность суммируемых отсчетов. Взвешивание весовым коэффициентом  в блоке 9 учитывает корреляционные свойства помехи, повышающие эффективность ее режектирования. Отсчеты сигнала от движущейся цели из-за сохранения доплеровских сдвигов фазы не подавляются.
в блоке 9 учитывает корреляционные свойства помехи, повышающие эффективность ее режектирования. Отсчеты сигнала от движущейся цели из-за сохранения доплеровских сдвигов фазы не подавляются.
Введение второго блока 3 задержки на интервал τ обеспечивает соответствие оценок  и
и  среднему элементу обучающей выборки, исключенному в накопителях 18 (фиг. 8). Величина т определяется выражением
среднему элементу обучающей выборки, исключенному в накопителях 18 (фиг. 8). Величина т определяется выражением
τ=tв+ntд/2,
где tв - время вычисления оценок  и , n - количество элементов обучающей выборки, tд - интервал (период) временной дискретизации.
и , n - количество элементов обучающей выборки, tд - интервал (период) временной дискретизации.
При компенсации отсчетов помехи с элемента разрешения, содержащего сигнал, исключается возможность ослабления или подавления сигнала за счет его влияния на используемые оценки. Кроме того, уменьшаются ошибки за счет рассогласования между оцениваемыми и действительными величинами доплеровской фазы и коэффициента корреляции помехи.
Синхронизация фильтра подавления помех осуществляется подачей на все блоки заявляемого устройства последовательности синхронизирующих импульсов от синхрогенератора 7 (фиг. 1).
Достигаемый технический результат состоит в повышении эффективности подавления пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей, что достигается адаптацией к параметрам помехи и уменьшением рассогласования между получаемыми усреднением отсчетов обучающей выборки оценками и отсчетами, соответствующими среднему элементу обучающей выборки.
Таким образом, фильтр подавления помех позволяет повысить эффективность компенсации пассивной помехи и выделения сигналов движущихся целей на фоне пассивных помех с априорно неизвестными корреляционными свойствами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫЧИСЛИТЕЛЬ ДЛЯ ПОДАВЛЕНИЯ ПОМЕХ | 2024 |
|
RU2840116C1 |
| ВЫЧИСЛИТЕЛЬ-ПОДАВИТЕЛЬ ПОМЕХ | 2024 |
|
RU2835118C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2024 |
|
RU2835120C1 |
| РЕЖЕКТОРНЫЙ ФИЛЬТР | 2024 |
|
RU2825253C1 |
| ФИЛЬТР КОМПЕНСАЦИИ ПОМЕХ | 2024 |
|
RU2834699C1 |
| ВЫЧИСЛИТЕЛЬ-РЕЖЕКТОР ПОМЕХ | 2024 |
|
RU2831755C1 |
| ВЫЧИСЛИТЕЛЬ РЕЖЕКЦИИ ПОМЕХ | 2024 |
|
RU2834767C1 |
| ВЫЧИСЛИТЕЛЬ ДЛЯ КОМПЕНСАЦИИ ПОМЕХ | 2024 |
|
RU2836219C1 |
| ВЫЧИСЛИТЕЛЬ-КОМПЕНСАТОР ПОМЕХ | 2024 |
|
RU2825197C1 |
| ФИЛЬТР РЕЖЕКЦИИ ПОМЕХ | 2024 |
|
RU2837274C1 |
Изобретение относится к радиолокационной технике и может быть использовано в когерентно-импульсных радиолокационных системах для выделения сигналов движущихся целей на фоне пассивных помех с неизвестными корреляционными свойствами. Техническим результатом изобретения является повышение эффективности подавления пассивной помехи с априорно неизвестными корреляционными свойствами и выделения сигналов движущихся целей. В фильтре подавления помех выход синхрогенератора соединен с синхровходами сумматоров. Входами фильтра подавления помех являются входы второго блока задержки, а выходами - выходы комплексного сумматора. 10 ил.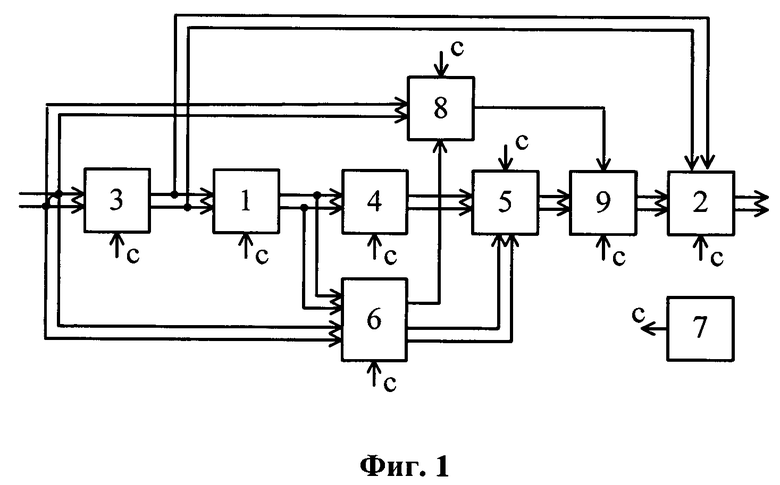
Фильтр подавления помех, содержащий первый блок задержки, комплексный сумматор, содержащий сумматоры, второй блок задержки, третий блок задержки, первый комплексный перемножитель, измеритель доплеровской фазы, вычислитель весового коэффициента, весовой блок и синхрогенератор, при этом входы первого блока задержки соединены с первыми входами комплексного сумматора, входы второго блока задержки соединены с вторыми входами измерителя доплеровской фазы и с первыми входами вычислителя весового коэффициента, выходы второго блока задержки соединены с входами первого блока задержки, выходы которого соединены с входами третьего блока задержки и первыми входами измерителя доплеровской фазы, первые выходы которого соединены с вторыми входами первого комплексного перемножителя, выходы третьего блока задержки соединены с первыми входами первого комплексного перемножителя, второй выход измерителя доплеровской фазы соединен с вторым входом вычислителя весового коэффициента, выход которого соединен с первым входом весового блока, выходы первого комплексного перемножителя соединены с вторыми входами весового блока, выходы которого соединены с вторыми входами комплексного сумматора, выход синхрогенератора соединен с синхровходами первого блока задержки, второго блока задержки, третьего блока задержки, первого комплексного перемножителя, измерителя доплеровской фазы, вычислителя весового коэффициента и весового блока, отличающийся тем, что выход синхрогенератора соединен с синхровходами сумматоров, причем входами фильтра подавления помех являются входы второго блока задержки, а выходами - выходы комплексного сумматора.
| ФИЛЬТР ПОДАВЛЕНИЯ ПОМЕХ | 2022 |
|
RU2796444C1 |
| ПОПОВ Д.И | |||
| Анализ эффективности подавления пассивных помех режекторными фильтрами // Известия высших учебных заведений | |||
| Поволжский регион | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| С | |||
| Торфодобывающая машина с вращающимся измельчающим орудием | 1922 |
|
SU87A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| СТЕНД-ПРИСТАВКА ДЛЯ ИСПЫТАНИЯ ИЗНОСОСТОЙКОСТИ УПЛОТНЕНИЙ ШТОКОВ ГИДРОМАШИН | 0 |
|
SU209015A1 |
| US 10536126 B2, 14.01.2020 | |||
| EP 0218861 A2, 22.04.1987 | |||
| JPS 6097730 A, 31.05.1985 | |||
| МНОГОКАНАЛЬНЫЙ ПЕРЕПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ ТРАКТ | 2004 |
|
RU2289202C2 |

