Изобретение относится к области охраны периметров объектов с использованием робототехнических систем. Предлагаемое изобретение может также использоваться при проектировании антитеррористической защищенности объектов и территорий.
В настоящее время имеются похожие решения по использованию подвижных роботов и механизмов для задач охраны объектов и территорий.
Например, известна «Система ограждения периметра и способ ее применения» (Perimeter containment system and method of use thereof), описанная в патенте US №7325243, МПК G08B 1/08, опубл. 2008 г. Система содержит центр управления, контактные узлы (или блоки) периметра и конструкцию периметра (например, в виде тюремного забора). Весь периметр разбит на зоны (участки) с расположенными на них средствами сигнализации. Контактные узлы периметра представляют собой электронные блоки, которые размещены на соответствующих подвижных транспортных средствах (автомобилях, платформах, тележках). Группа транспортных средств с контактными узлами периметра размещается снаружи замкнутого периметра (забора) и они могут совершать движения вокруг периметра. Каждый из контактных узлов периметра имеет радиосвязь с центром управления и выполнен с возможностью осуществлять аудио передачу и видео передачу с определенного участка периметра по команде от центра управления. Задача контактных узлов периметра заключается в слежении за нарушением структуры периметра, например, за возможным разрушением заграждения нарушителями. Контактные узлы периметра могут анализировать тревожную ситуацию на определенном участке периметра и передавать, при необходимости, аудио- и видеоинформацию в центр управления. Учитывая, что количество контактных узлов периметра, размещенных на транспортных средствах, значительно меньше, чем участков периметра, то этот факт компенсируется возможностью передвижения их по периметру для анализа состояния угроз на разных участках. Алгоритм функционирования системы работает таким образом, что при получении тревожного сообщение от одного из участков периметра, центр управления передает команду ближайшему к этому участку контактному узлу периметра, чтобы он переместился в зону, где произошло нарушение. Подъехав к этому месту, контактный узел периметра оценивает ситуацию и передает информацию в центр управления. В случае отсутствия тревожной ситуации (например, отсутствия разрушения забора) сигнал тревоги в системе снимается. В противном случае дается команда службе охраны по противодействию нарушителям.
Сходными существенными признаками являются: центр управления, контактные узлы (или блоки) периметра, средства сигнализации, подвижные транспортные средства, радиосвязь контактных узлов периметра с центром управления, возможность передачи аудио- и видеоинформации в центр управления.
Недостатком системы является то, что она не приспособлена для контроля технического состояния множества периметровых средств обнаружения на местности, образующих протяженный рубеж охраны.
«Система безопасности и движущийся робот» (Security system and moving robot), описанные в патенте US №7750803, МПК G08B 13/00, опубл. 2010 г. Указанное изобретение направлено на обеспечение безопасности людей в жилых домах и других закрытых помещениях. Система безопасности содержит группу стационарных датчиков безопасности, которые установлены на окнах и входных дверях в некотором контролируемом помещении. В качестве датчиков обычно используются датчики вибрации, акустические датчики, инфракрасные датчики, датчики ультразвуковой волны и другие. Все стационарные датчики объединены в локальную сеть и подключены к серверу (главному компьютеру поста охраны). В систему безопасности дополнительно включен подвижный робот, который предназначен для патрулирования здания в определенном режиме работы. Подвижный робот оснащен видеокамерой, а также различными видами бортовых датчиков (например, датчиком вибрации, акустическим датчиком, инфракрасным датчиком и другими) для мониторинга ситуации в здании пока его патрулирует. Робот наделен охранными функциями и при обнаружении аномального состояния в помещении передает данные о тревожном состоянии в главный компьютер. Датчики, установленные в жилых помещениях, часто выдают ложные срабатывания и органы безопасности должны направлять охранников для анализа сигналов тревоги, что вызывает большую нагрузку на силовые структуры. Поэтому в системе предусмотрена возможность посылать подвижного робота чаще в комнаты с более высокой частотой обнаружения аномалий.
Сходными существенными признаками являются: группа стационарных датчиков, главный компьютер поста охраны, подвижный робот с видеокамерой и набором бортовых датчиков, возможность патрулирования роботом контролируемого объекта.
Недостатком системы является то, что она не приспособлена для контроля технического состояния множества периметровых средств обнаружения на местности, образующих протяженный рубеж охраны.
Известна «Робототехническая система и автономный мобильный робот» (Robot system and autonomous mobile robot), описанные в патенте US №7218993, МПК G06F 19/00, опубл. 2007 г. Указанная робототехническая система включает в себя автономного мобильного робота, который перемещается по заданной траектории с целью патрулирования местности с определенными интервалами времени. Робот имеет камеру, которая фотографируя окрестности, делает фотографии в заданных местах во время движения по заданной траектории. В состав системы входят передающая станция, установленная на роботе, и приемный пункт (центральный пост) с приемной станцией. Связь между роботом и приемной станцией осуществляется по беспроводному каналу связи. Снимки, сделанные камерой, сохраняются в памяти робота и передаются с помощью передающей станции по беспроводному каналу связи в приемный пункт или на сотовый телефон по запросу оператора системы с сотового телефона. Робот имеет датчики состояния окружающей среды (датчики температуры, влажности, шума, яркости света) для мониторинга экологического состояния местности. Робот имеет также звуковой датчик (микрофон) для записи звука и его анализа. Для осуществления патрулирования на местности робот имеет механизм перемещения с колесами. Движение робота обеспечивает секция управления его перемещением по заданной траектории. Фотокамера и датчики робота предназначены также для функционирования секции обнаружения подозрительных объектов, существование которых на местности недопустимо.
Сходными существенными признаками являются: автономный мобильный робот и приемный пункт (центральный пост), передающая и приемная станции, образующие канал беспроводной связи, механизм перемещения с колесами и секция управления перемещением по заданной траектории, возможность использования робота в режиме патрулирования.
Недостатком системы является то, что она не приспособлена для контроля технического состояния множества периметровых средств обнаружения на местности, образующих протяженный рубеж охраны.
Наиболее близкой по технической сущности к заявленному изобретению является «Система охранной сигнализации с возможностью беспроводного дистанционного управления средствами обнаружения», описанная в патенте RU №2614565, МПК G08B 13/00, G08B 25/00, опубл. 2017 г., которая выбрана в качестве прототипа. Система содержит центральный пост охраны, множество средств обнаружения, выполненных с возможностью формирования номера участка рубежа охраны, и группу мобильных пунктов контроля и управления средствами обнаружения с возможностью подключения к линии интерфейса. Каждый мобильный пункт контроля и управления средствами обнаружения содержит адаптер связи с первой приемопередающей антенной и переносной пульт со второй приемопередающей антенной, которые связаны между собой посредством радиосвязи. Система обеспечивает как централизованное, так и децентрализованное управление средствами обнаружения при использовании радиосвязи. При децентрализованном управлении для корректировки параметров обнаружения на определенном участке охраняемого рубежа дежурный оператор с мобильным пунктом контроля и управления выдвигается на участок. При вхождении в зону действия радиосвязи оператор подключает переносной пульт посредством защищенного процесса идентификации с вводом пароля доступа к средству обнаружения и получает информацию о состоянии средства обнаружения, проводит его настройку и осуществляет контрольные пересечения рубежа охраны. На оператора также возлагается обязанность дежурного обхода объекта охраны для контроля состояния охранной системы.
Сходными существенными признаками являются: центральный пост охраны, множество средств обнаружения, линия интерфейса, группа мобильных пунктов контроля и управления средствами обнаружения, а также возможность децентрализованного управления средствами обнаружения с использованием радиосвязи.
Недостатком системы является то, что для децентрализованного управления средствами обнаружения и дежурного обхода объекта охраны с целью контроля состояния охранной системы используются людские ресурсы, что делает работу службы охраны рутинной и трудоемкой. Кроме того, не исключены ошибочные действия операторов, особенно в критических погодных условиях (сильный дождь, ветер, обледенение, вьюга и т.п.).
Целью настоящего изобретения является создание автоматизированного комплекса для охраны периметров объектов с робототехнической системой, выполненного с возможностью облегчения труда для сотрудников службы охраны.
Охрана протяженных периметров особо важных объектов предъявляет повышенные требования к выявлению тревожных ситуаций и пресечению несанкционированных действий, что должно обеспечиваться особым подходом к организации функционирования системы с возможным исключением человеческого фактора из процесса обеспечения режима охраны. Особенностью изобретения является то, что в качестве мобильных пунктов контроля и управления средствами обнаружения используется, по меньшей мере, один подвижный робот, который заменяет собой функции мобильных пунктов, а также функции оператора при дежурном обходе объекта охраны.
Для достижения поставленной цели в известное техническое решение введены новые существенные признаки, которые позволяют обеспечить надежную охрану протяженных периметров особо важных объектов.
Эта цель достигнута в предложенном «Автоматизированном комплексе для охраны периметров объектов с робототехнической системой», который содержит центральный пост охраны, множество средств обнаружения, расположенных на местности вдоль протяженного периметра рубежа охраны объекта и образующих участки охраны с номерами 1-n, средства обнаружения подключены к центральному посту охраны посредством линии интерфейса, в состав автоматизированного комплекса введен, по меньшей мере, один подвижный робот, содержащий блок электронный, автономное устройство контроля с видеокамерой, приемопередающие антенны ближней и дальней радиосвязи, каждое из средств обнаружения наделено радиоканалом связи с ближней зоной действия, центральный пост охраны содержит приемопередающую антенну для дальней связи, а подвижный робот выполнен с возможностями:
- патрулирования периметра охраняемого объекта при движении вдоль рубежа охраны, причем с возможностью поочередного образования ближних радиоканалов связи со средствами обнаружения при вхождении в зоны их ближней радиосвязи;
- образования дальнего радиоканала связи с центральным постом охраны для приема команд и передачи сообщений о техническом состоянии средств обнаружения и видеоинформации;
- осуществления проверки технического состояния каждого средства обнаружения после образования с ним ближнего радиоканала связи путем считывания необходимой информации из его памяти;
- осуществления контроля за состоянием инженерных средств физической защиты на периметре (в том числе защитных заграждений, ворот, калиток, мачт освещения) на каждом из участков охраны с номерами 1-пс помощью видеокамеры автономного устройства контроля по команде от центрального поста охраны;
- осуществления видеосъемки местности в окрестностях рубежа охраны каждого из участков охраны с номерами 1-n с помощью видеокамеры автономного устройства контроля по команде от центрального поста охраны для проверки состояния рубежа охраны и анализа тревожных ситуаций;
- осуществления контрольных проходов через зоны обнаружения на выбранных участках охраны по командам от центрального поста охраны;
- обеспечения временной охраны одного из участков при выходе из строя средства обнаружения или ремонтных работах на участке за счет приведения в действие автономного устройства контроля с видеокамерой.
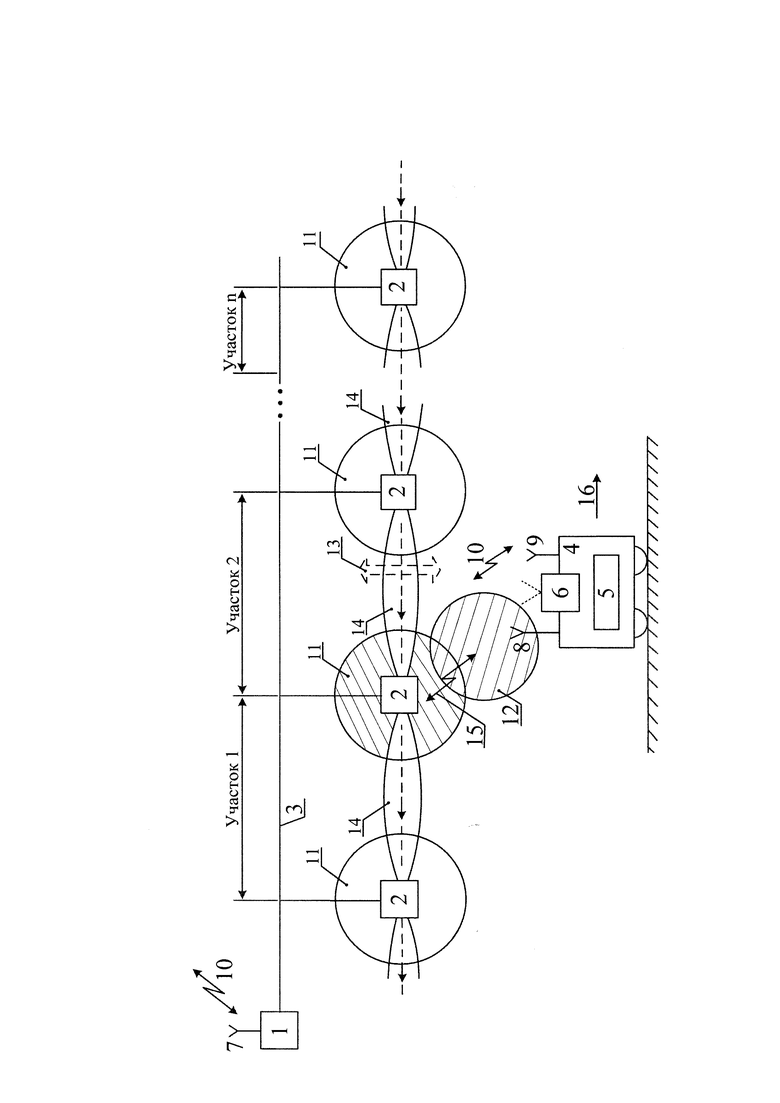
Сущность изобретения поясняется чертежом, на котором изображена структурная схема автоматизированного комплекса. На чертеже введены следующие обозначения: центральный пост охраны - 1, средства обнаружения - 2, линия интерфейса - 3, подвижный робот - 4, блок электронный - 5, автономное устройство контроля с видеокамерой - 6, приемопередающая антенна центрального поста охраны - 7, приемопередающая антенна ближней радиосвязи - 8, приемопередающая антенна дальней радиосвязи - 9, радиоканал связи центрального поста охраны с подвижным роботом - 10, зона ближней радиосвязи средства обнаружения - 11, зона ближней радиосвязи подвижного робота - 12, траектория движения подвижного робота при осуществлении контрольного прохода - 13, зоны обнаружения средств обнаружения - 14, радиоканал связи подвижного робота со средством обнаружения - 15, направление движения подвижного робота при патрулировании периметра охраняемого объекта - 16.
Предлагаемый автоматизированный комплекс обеспечивает:
- возможность удаленной диагностики и сбора данных о состоянии средств обнаружения без участия людских ресурсов с помощью подвижного робота;
- возможность обеспечения с помощью робота временного закрытия участка периметра при замене вышедшего из строя оборудования;
- резервирование (за счет использования подвижного робота) и бесперебойность функционирования автоматизированного комплекса.
Предложенный автоматизированный комплекс работает следующим образом. При организации охраны протяженного рубежа (например, 20 км), весь рубеж разделяется на множество участков длиной 100-500 м с номерами 1-n. На каждом из участков устанавливается средство обнаружения 2, которое соответствует номеру соответствующего участка. Все средства обнаружения 2 подключаются к центральному посту охраны 1 посредством линии интерфейса 3. Средства обнаружения 2 формируют на соответствующих участках зоны обнаружения 14, которые обеспечивают формирование непрерывной протяженной контролируемой зоны вдоль охраняемого периметра. Каждое из средств обнаружения 2 наделено радиоканалом связи с объемной ближней зоной действия радиосвязи 11, условно обозначенной на чертеже в виде круговой зоны определенного радиуса. Центральный пост охраны 1 содержит приемопередающую антенну 7 для дальней связи и образует радиоканал связи 10 с подвижным роботом 4. В свою очередь, подвижный робот 4 содержит приемопередающие антенны ближней 8 и дальней 9 радиосвязи, а также блок электронный 5 и автономное устройство контроля 6 с видеокамерой. Приемопередающая антенна ближней радиосвязи 8 формирует объемную зону ближней радиосвязи 12 подвижного робота 4, условно обозначенную на чертеже в виде круговой зоны определенного радиуса. При вхождении зоны ближней радиосвязи 8 подвижного робота 4 в зону ближней радиосвязи 11 средства обнаружения (как обозначено на чертеже) образуется радиоканал связи 15 подвижного робота 4 со средством обнаружения 2. Для обеспечения помехоустойчивой работы автоматизированного комплекса радиоканалы связи предлагается использовать в разных частотных диапазонах (например, радиоканал связи 15 - на радиочастоте 433 МГц, радиоканал связи 10 - на радиочастоте 868 МГц).
Подвижный робот 4 обеспечивает патрулирование периметра охраняемого объекта при движении вдоль рубежа охраны по направлению 16, указанному на чертеже, с поочередным обходом всех средств обнаружения 2. При вхождении зоны ближней радиосвязи 8 подвижного робота 4 в одну из зон ближней радиосвязи 11 одного из средств обнаружения 2 (например, как обозначено на чертеже) происходит радиоконтакт подвижного робота с этим средством обнаружения. Подключение подвижного робота к средству обнаружения представляет собой информационно защищенный процесс идентификации подвижного робота с вводом пароля на доступ к средству обнаружения. После получения доступа подвижный робот осуществляет проверку технического состояния средства обнаружения путем считывания необходимой информации из его памяти с последующим ее анализом. При этом могут быть проверены алгоритмы функционирования средства обнаружения, его чувствительность, пороговые уровни, запас по динамическому диапазону уровня зондирующего сигнала и другие параметры. При обнаружении неисправности подвижный робот 4 по дальнему радиоканалу связи 10 передает в центральный пост охраны 1 сообщение о необходимости перенастройки средства обнаружения или его ремонте.
Другая функция подвижного робота 4 заключается в осуществлении контроля за состоянием инженерных средств физической защиты (защитных заграждений, ворот, калиток, мачт освещения и других сооружений) каждого из участков охраны 1-n протяженного периметра. Для этого по команде от центрального поста охраны 1 подвижный робот 4 осуществляет видеосъемку выбранного участка рубежа охраны с помощью видеокамеры автономного устройства контроля 6 и передает полученную информацию для анализа в центральный пост охраны. Подвижный робот 4 может осуществлять также видеосъемку местности в окрестностях каждого из участков охраны 1-n с последующей передачей информации в центральный пост охраны. Необходимость этой функции определяется тем, что на отдельных участках охраны могут появиться нежелательные загромождения, ухудшающие видимость (упало дерево, скопился мусор, образовался сугроб снега и т.п.), что может привести к возникновению тревожной ситуации.
Следующая функция подвижного робота 4 заключается в осуществлении контрольных проходов через зоны обнаружения 14 на выбранных участках охраны по командам от центрального поста охраны 1. Пример траектории 13 движения подвижного робота 4 при осуществлении контрольного прохода (туда и обратно) изображен на чертеже. При выполнении контрольного прохода и правильной работе средства обнаружения на этом участке охраны формируется сигнал тревоги. В противном случае, отсутствие сигнала тревоги свидетельствует о неисправности средства обнаружения, что сообщается в центральный пост охраны.
Если требуется ремонт или замена неисправного средства обнаружения, то подвижный робот 4 может выполнить дополнительную функцию обеспечения временной охраны одного из участков за счет приведения в действие автономного устройства контроля с видеокамерой 6. Кроме видеокамеры, автономное устройство контроля может быть оснащено, например, однопозиционным радиолучевым средством обнаружения, инфракрасным пассивным средством обнаружения, сейсмическим средством обнаружения или тепловизором. После ремонта и возобновления охраны на участке подвижный робот может приступить к выполнению основных функций.
Введенные в известную систему дополнительные признаки позволяют придать предлагаемому автоматизированному комплексу новые существенные свойства, увеличить степень универсальности комплекса, приводящую к повышению его эффективности и надежности выполняемых функций по охране периметров объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для охраны территорий объектов с робототехнической системой | 2020 |
|
RU2759345C1 |
| Робототехническая система для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора | 2021 |
|
RU2756335C1 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ БЕСПРОВОДНОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2015 |
|
RU2614565C2 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| Интегрированный комплекс физической защиты периметров и территорий объектов | 2019 |
|
RU2726942C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| СИСТЕМА ОХРАНЫ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ | 2013 |
|
RU2536429C1 |
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2504015C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2023 |
|
RU2822878C1 |
Изобретение относится к области охраны периметров объектов с использованием робототехнических систем. Техническим результатом является обеспечение автоматизированного контроля технического состояния множества периметровых средств обнаружения на местности, образующих протяженный рубеж охраны. Технический результат достигается тем, что в заявленном решении предусмотрен автоматизированный комплекс для охраны периметров объектов, в состав которого введен подвижный робот с возможностью патрулирования периметра охраняемого объекта при движении вдоль рубежа охраны, причем с возможностью поочередного образования ближних радиоканалов связи со средствами обнаружения для проверки их технического состояния, образования дальнего радиоканала связи с центральным постом охраны, осуществления контроля за состоянием инженерных средств физической защиты на периметре, осуществления видеосъемки местности в окрестностях рубежа охраны, обеспечения временной охраны одного из участков при выходе из строя средства обнаружения или ремонтных работах на участке за счет приведения в действие автономного устройства контроля с видеокамерой. 1 ил.
Автоматизированный комплекс для охраны периметров объектов с робототехнической системой, содержащий центральный пост охраны, множество средств обнаружения, расположенных на местности вдоль протяженного периметра рубежа охраны объекта и образующих участки охраны с номерами 1-n, средства обнаружения подключены к центральному посту охраны посредством линии интерфейса, отличающийся тем, что в состав автоматизированного комплекса введен по меньшей мере один подвижный робот, содержащий блок электронный, автономное устройство контроля с видеокамерой, приемопередающие антенны ближней и дальней радиосвязи, каждое из средств обнаружения наделено радиоканалом связи с ближней зоной действия, центральный пост охраны содержит приемопередающую антенну для дальней связи, а подвижный робот выполнен с возможностями:
- патрулирования периметра охраняемого объекта при движении вдоль рубежа охраны, причем с возможностью поочередного образования ближних радиоканалов связи со средствами обнаружения при вхождении в зоны их ближней радиосвязи;
- образования дальнего радиоканала связи с центральным постом охраны для приема команд и передачи сообщений о техническом состоянии средств обнаружения и видеоинформации;
- осуществления проверки технического состояния каждого средства обнаружения после образования с ним ближнего радиоканала связи путем считывания необходимой информации из его памяти;
- осуществления контроля за состоянием инженерных средств физической защиты на периметре, в том числе защитных заграждений, ворот, калиток, мачт освещения, на каждом из участков охраны с номерами 1-n с помощью видеокамеры автономного устройства контроля по команде от центрального поста охраны;
- осуществления видеосъемки местности в окрестностях рубежа охраны каждого из участков охраны с номерами 1-n с помощью видеокамеры автономного устройства контроля по команде от центрального поста охраны для проверки состояния рубежа охраны и анализа тревожных ситуаций;
- осуществления контрольных проходов через зоны обнаружения на выбранных участках охраны по командам от центрального поста охраны;
- обеспечения временной охраны одного из участков при выходе из строя средства обнаружения или ремонтных работах на участке за счет приведения в действие автономного устройства контроля с видеокамерой.
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ БЕСПРОВОДНОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2015 |
|
RU2614565C2 |
| ИВАНЕНКОВ В.В | |||
| и др.: "Роботизированная система охраны и обороны специальных объектов и участков границы", Вестник МГТУ им | |||
| Н.Э | |||
| Баумана | |||
| Сер | |||
| "Машиностроение", 2012, [найдено: 24.09.2021] | |||
| Способ получения сульфокислот из нефтяных дестиллатов, минеральных масел, парафина или церезина, обработанных серною кислотою | 1912 |
|
SU460A1 |
| ЛИТВИНОВ О.В | |||
| и др: "Использование | |||

