Изобретение относится к области охраны территорий объектов с использованием робототехнических систем. Предлагаемое изобретение может также использоваться при проектировании антитеррористической защищенности территорий охраняемых объектов.
В настоящее время имеются похожие решения по использованию подвижных роботов и летательных аппаратов для задач охраны территорий и проверке технического состояния объектов. Например, известны «Беспилотные системы для пред-рейсовой инспекции и вспомогательной поддержки» (Drone systems for pre-trip inspection and assisted backing), описанные в патенте US №2016/0129999, МПК: B64C 39/02, B60R 1/00, G05D 1/00, опубл. 2016 г. В патенте описано использование БПЛА для оказания помощи водителям крупногабаритных колесных транспортных средств и для проведения пред-рейсовых осмотров транспортных средств перед началом движения. БПЛА содержит видеокамеру и блок электронный (контроллер), сконфигурированный для связи с БПЛА, который обеспечивает передачу видеоизображений во время полета в реальном времени для проверки технического состояния.
Сходным существенным признаком с заявленным техническим решением является использование БПЛА с видеокамерой для проверки технического состояния объектов.
Недостатком системы является то, что она не приспособлена для проверки технического состояния множества пунктов охранной сигнализации, расположенных в местах наиболее вероятного проникновения нарушителей на обозначенной территории.
Известна система обнаружения радиочастотных устройств и вмешательства («Radiofrequency device and intervention»), описанная в патенте US №9996079, МПК: G05D 1/00, H04L 29/08, G07C 9/00, Н04В 1/707, F41H 13/00, опубл. 2018 г. Система обеспечивает с помощью беспилотного летательного аппарата мониторинг и защиту обозначенной территории. В одном из аспектов изобретения описана система обнаружения радиоуправляемых транспортных средств, движущихся в заданной зоне, путем мониторинга радиолиний, которые используются для их управления. Для этого применяется сканирование одной или нескольких радиочастот. Система содержит одну или несколько приемных и передающих антенн, сконфигурированных для приема-передачи одного или нескольких радиочастотных сигналов связи, и блок электронный для обработки данных. Для обнаружения объектов с радиочастотными устройствами используются характеристики радиочастотных сигналов, а также протоколы радиоуправления. Система позволяет идентифицировать объект в качестве разрешенного или несанкционированного нахождения в заданной зоне.
Сходными существенными признаками с заявленным техническим решением является наличие приемо-передающих антенн, сконфигурированных для приема и передачи радиочастотных сигналов, и блока электронного, а также возможность мониторинга беспилотным летательным аппаратом обозначенной территории.
Недостатком системы является то, что она не приспособлена для проверки технического состояния множества пунктов охранной сигнализации, расположенных в местах наиболее вероятного проникновения нарушителей на обозначенной территории.
Наиболее близкой по технической сущности к заявленному изобретению является «Робототехническая система и автономный мобильный робот» (Robot system and autonomous mobile robot), описанные в патенте US №7218993, МПК G06F 19/00, опубл. 2007 г. Указанная робототехническая система включает в себя автономного мобильного робота, который перемещается по заданной траектории с целью патрулирования местности с определенными интервалами времени. Робот имеет видеокамеру, которая фотографируя окрестности, делает фотографии в заданных местах во время движения по заданной траектории. В состав системы входят передающая станция, установленная на роботе, и приемный пункт (центральный пост) с приемной станцией. Связь между роботом и приемной станцией осуществляется по беспроводному каналу связи (радиоканалу). Снимки, сделанные видеокамерой, сохраняются в памяти робота и передаются с помощью передающей станции по радиоканалу связи в приемный пункт или на сотовый телефон по запросу оператора системы с сотового телефона. Робот имеет датчики состояния окружающей среды (датчики температуры, влажности, шума, яркости света) для мониторинга экологического состояния местности. Робот имеет также звуковой датчик (микрофон) для записи звука и его анализа. Для осуществления патрулирования на местности робот имеет механизм перемещения. Движение робота обеспечивает секция управления его перемещением по заданной траектории. Видеокамера и датчики робота предназначены также для функционирования секции обнаружения подозрительных объектов, существование которых на местности недопустимо.
Сходными существенными признаками с заявленным техническим решением являются: автономный мобильный робот и приемный пункт (центральный пост охраны), передающая и приемная станции, образующие канал радиосвязи, механизм перемещения и секция управления перемещением по заданной траектории, возможность использования робота в режиме патрулирования.
Недостатком системы является то, что она не приспособлена для обзора местности и проверки в автоматизированном режиме технического состояния множества пунктов охранной сигнализации на местности, расположенных в местах наиболее вероятного проникновения нарушителей на объект, без привлечения сотрудников службы охраны.
Целью настоящего изобретения является создание робототехнической системы для охраны территории объекта, выполненной с возможностью обзора местности и проверки в автоматизированном режиме с помощью беспилотного летательного аппарата-инспектора технического состояния множества пунктов охранной сигнализации для облегчения труда сотрудников службы охраны.
Охрана территорий особо важных объектов предъявляет повышенные требования к выявлению тревожных ситуаций и пресечению несанкционированных действий, что должно обеспечиваться особым подходом к организации функционирования системы с возможным исключением человеческого фактора из процесса обеспечения режима охраны. Особенностью изобретения является то, что для обзора местности и проверки технического состояния множества пунктов охранной сигнализации используется, по меньшей мере, один беспилотный летательный аппарат-инспектор, который заменяет собой функции операторов при дежурном обходе территории объекта охраны. Для достижения поставленной цели в известное техническое решение введены новые существенные признаки, которые позволяют обеспечить надежную охрану территорий особо важных объектов. Эта цель достигнута в предложенной «Робототехнической системе для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора», содержащей центральный пост охраны с приемопередающей антенной, а также, по меньшей мере, одного автономного мобильного робота, который выполнен с возможностью перемещения по заданной траектории с целью патрулирования местности, содержащий механизм перемещения, секцию управления перемещением по заданной траектории, приемопередающую антенну дальней радиосвязи с центральным постом охраны и видеокамеру. В качестве автономного мобильного робота используется беспилотный летательный аппарат-инспектор, а робототехническая система дополнительно содержит станции подзарядки для беспилотного летательного аппарата-инспектора и множество пунктов охранной сигнализации с номерами 1- n, расположенных на территории охраняемого объекта и образующих зоны обнаружения нарушителей, каждый из пунктов охранной сигнализации наделен аппаратурой спутниковой навигации GPS/ГЛОНАСС и радиоканалом связи с ближней зоной действия, в состав беспилотного летательного аппарата-инспектора введены блок электронный и приемопередающая антенна ближней радиосвязи, в секцию управления перемещением по заданной траектории дополнительно введена аппаратура спутниковой навигации GPS/ГЛОНАСС, а беспилотный летательный аппарат-инспектор выполнен с дополнительными возможностями:
- патрулирования с видеосъемкой местности охраняемой территории при полете по определенному маршруту, причем с возможностью поочередного образования ближних радиоканалов связи с пунктами охранной сигнализации при вхождении в зоны их ближней радиосвязи;
- осуществления проверки технического состояния каждого пункта охранной сигнализации после образования с ним ближнего радиоканала связи путем считывания необходимой информации из его памяти;
- осуществления видеосъемки местности в окрестностях зоны обнаружения каждого из пунктов охранной сигнализации с помощью видеокамеры по команде от центрального поста охраны для проверки состояния зоны обнаружения и анализа тревожных ситуаций с дальнейшей передачей информации на центральный пост охраны,
- встраивания в систему функционирования одного из пунктов охранной сигнализации для идентификации объекта-нарушителя с использованием видеоизображений при обмене информацией с данным пунктом охранной сигнализацией и центральным постом охраны;
- сопровождения объекта-нарушителя по территории объекта охраны с продолжением видеонаблюдения и сообщением дополнительной информации в центральный пост охраны;
- осуществления инициализации пунктов охранной сигнализации, находящихся в «спящем» (sleep) режиме, при обнаружении возможных угроз в ходе видеосъемки при патрулировании местности.
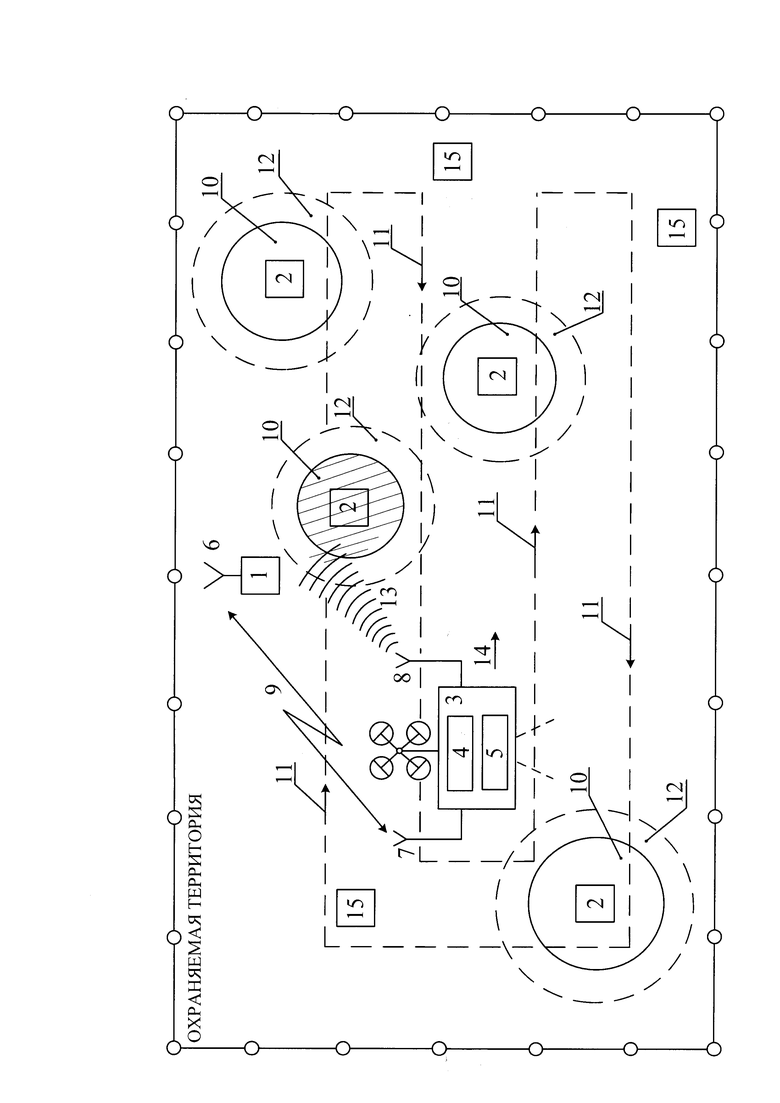
Сущность изобретения поясняется чертежом, на котором изображена структурная схема робототехнической системы. На чертеже введены следующие обозначения: центральный пост охраны - 1, пункты охранной сигнализации - 2, беспилотный летательный аппарат-инспектор - 3, блок электронный - 4, видеокамера - 5, приемопередающая антенна центрального поста охраны - 6, приемопередающая антенна ближней радиосвязи - 7, приемопередающая антенна дальней радиосвязи - 8, радиоканал связи центрального поста охраны с беспилотным летательным аппаратом-инспектором - 9, зона ближней радиосвязи пункта охранной сигнализации -10, траектория полета беспилотного летательного аппарата-инспектора по охраняемой территории - 11, зоны обнаружения нарушителей пунктов охранной сигнализации - 12, радиоканал связи беспилотного летательного аппарата-инспектора с пунктом охранной сигнализации - 13, направление полета беспилотного летательного аппарата-инспектора - 14, станции подзарядки для беспилотного летательного аппарата-инспектора - 15.
Предлагаемая робототехническая система обеспечивает обзор местности и возможность удаленной диагностики и сбора данных о состоянии пунктов охранной сигнализации без участия людских ресурсов с помощью беспилотного летательного аппарата-инспектора.
Предложенная робототехническая система работает следующим образом. При организации охраны обширной территории в местах наиболее вероятного проникновения нарушителей (дороги, лесные тропы, овраги, кустарники, прибрежные зоны и т.п.) располагаются пункты охранной сигнализации с номерами 1- n, образующие соответствующие зоны обнаружения нарушителей. Все пункты охранной сигнализации 2 подключаются к центральному посту охраны 1 посредством радиоканала дальней радиосвязи. Пункты охранной сигнализации 2 формируют зоны обнаружения 12, например, в виде круговых зон, обозначенных на чертеже. Каждый из пунктов охранной сигнализации 2 наделен радиоканалом связи с объемной ближней зоной действия радиосвязи 10, условно обозначенной на чертеже в виде круговой зоны определенного радиуса. Центральный пост охраны 1 содержит приемопередающую антенну 6 для дальней связи и образует радиоканал связи 9 с беспилотным летательным аппаратом-инспектором 3. В свою очередь, беспилотный летательный аппарат-инспектор 3 содержит приемопередающие антенны ближней 8 и дальней 7 радиосвязи, а также блок электронный 4 и видеокамеру 5. Приемопередающая антенна ближней радиосвязи 8 формирует зону распространения радиоволн ближней радиосвязи и, при вхождении радиоволн в зону ближней радиосвязи 10 пункта охранной сигнализации (как обозначено на чертеже), образуется радиоканал связи 13 беспилотного летательного аппарата-инспектора 3 с пунктом охранной сигнализации 2. Для обеспечения помехоустойчивой работы робототехнической системы радиоканалы связи предлагается использовать в разных частотных диапазонах (например, радиоканал связи 13 - на радиочастоте 433 МГц, радиоканал связи 9 - на радиочастоте 868 МГц).
Беспилотный летательный аппарат-инспектор 3 обеспечивает обзор местности и патрулирование территории охраняемого объекта при полете, например, по траектории 11, указанной на чертеже, в направлении 14 с поочередным облетом всех пунктов охранной сигнализации 2. При вхождении радиоволн беспилотного летательного аппарата-инспектора 3 в одну из зон ближней радиосвязи 10 одного из пункта охранной сигнализации 2 (например, как обозначено на чертеже) происходит радиоконтакт беспилотного летательного аппарата-инспектора с этим пунктом охранной сигнализации. Подключение беспилотного летательного аппарата-инспектора к пункту охранной сигнализации представляет собой информационно защищенный процесс идентификации беспилотного летательного аппарата-инспектора с вводом пароля на доступ к пункту охранной сигнализации. После получения доступа беспилотный летательный аппарат-инспектор осуществляет проверку технического состояния пункта охранной сигнализации путем считывания необходимой информации из его памяти в блок электронный 4 с последующим ее анализом. При этом могут быть проверены алгоритмы функционирования пункта охранной сигнализации, его чувствительность, пороговые уровни, запас по динамическому диапазону уровня зондирующего сигнала и другие параметры. При обнаружении неисправности беспилотный летательный аппарат-инспектор 3 по дальнему радиоканалу связи 9 передает в центральный пост охраны 1 сообщение о необходимости перенастройки пункта охранной сигнализации или его ремонте. Пункты охранной сигнализации могут изменять свое расположение на местности в зависимости от тактических соображений охраны. При этом с помощью аппаратуры спутниковой навигации GPS/ГЛОНАСС отслеживаются соответствующие изменения координат для новой привязки к местности. При смене дислокаций постов охранной сигнализации должна измениться, соответственно, и траектория полета беспилотного летательного аппарата-инспектора. Аппаратура спутниковой навигации GPS/ГЛОНАСС, введенная в секцию управления полетом по заданной траектории беспилотного летательного аппарата-инспектора, позволяет осуществлять топографическую привязку к местности координат полета беспилотного летательного аппарата-инспектора и корректировать его траекторию полета в случае изменения дислокации пунктов охранной сигнализации.
Вторая функция беспилотного летательного аппарата-инспектора 3 заключается в осуществлении видеосъемки местности в окрестностях каждой из зон обнаружения 12 с последующей передачей информации в центральный пост охраны 1. Для этого по команде от центрального поста охраны 1 беспилотный летательный аппарат-инспектор 3 осуществляет видеосъемку выбранной зоны обнаружения с помощью видеокамеры 5 и передает полученную информацию для анализа в центральный пост охраны 1. Необходимость этой функции определяется тем, что на отдельных зонах обнаружения могут появиться нежелательные загромождения, ухудшающие видимость (упало дерево, скопился мусор, образовался сугроб снега и т.п.), что может привести к возникновению тревожной ситуации.
Следующая функция беспилотного летательного аппарата-инспектора 3 заключается в возможности встраивания его в систему функционирования одного из пунктов охранной сигнализации для идентификации объекта-нарушителя с использованием видеоизображений при обмене информацией с данным пунктом охранной сигнализацией и центральным постом охраны. Необходимость этой функции определяется тем, что беспилотный летательный аппарат-инспектор с его видеокамерой может существенно помочь пункту охранной сигнализации в идентификации объекта-нарушителя. Беспилотный летательный аппарат-инспектор может зависать над подозреваемом объектом и совершать его видеосъемку под разными ракурсами (вид с верху, сбоку), что обеспечивает возможность в получении дополнительной информации для распознавания объекта-нарушителя.
К другим функциям беспилотного летательного аппарата-инспектора можно отнести возможность сопровождения объекта-нарушителя по территории объекта охраны с продолжением видеонаблюдения и сообщением дополнительной информации в центральный пост охраны, а также осуществления инициализации пунктов охранной сигнализации, находящихся в «спящем» (sleep) режиме, при обнаружении возможных угроз в ходе видеосъемки при патрулировании местности.
В качестве беспилотного летательного аппарата-инспектора может использоваться квадракоптер, как изображено на чертеже, или любой другой беспилотный летательный аппарат.
Станции подзарядки 15 для беспилотного летательного аппарата-инспектора 3 располагаются на территории охраняемого объекта в удобных местах для возможности подзарядки энергией и технического обслуживания.
В качестве пунктов охранной сигнализации 2 могут использоваться, например, быстроразвертываемые сигнализационные комплексы (БСК) «Паутина-М» БАЖК.425624.016, представленные в интернете на сайте www.nikiret.ru. В состав каждого БСК входят следующие средства обнаружения нарушителей, работающие на разных физических принципах:
- сейсмическое средство обнаружения БСК-С БАЖК.425139.010;
- средство обнаружения радиолучевое двухпозиционное БСК-РЛД БАЖК.425142.051;
- средство обнаружения двухпозиционное радиоволновое подземное БСК-РВП БАЖК.425142.058;
магнитометрическое средство обнаружения БСК-МСО БАЖК.425113.005;
- двухпозиционное радиоволновое средство обнаружения БСК-РВД БАЖК425142.048;
- инфракрасное средство обнаружения БСК-ИК БАЖК.425152.003;
- обрывное средство обнаружения БСК-О БАЖК.468173.026.
Указанные средства обнаружения могут использоваться в БСК по отдельности или совместно с другими средствами обнаружения из состава БСК.
Введенные в известную систему дополнительные признаки позволяют придать предлагаемой робототехнической системе новые существенные свойства, увеличить степень универсальности системы, приводящую к повышению его эффективности и надежности выполняемых функций по охране территорий объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для охраны территорий объектов с робототехнической системой | 2020 |
|
RU2759345C1 |
| Автоматизированный комплекс для охраны периметров объектов с робототехнической системой | 2020 |
|
RU2759423C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2023 |
|
RU2822878C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории | 2016 |
|
RU2629521C1 |
| Интеллектуальная сеть технических средств обнаружения с возможностью функционирования в среде big data для контроля периметров и территорий объектов | 2018 |
|
RU2682013C1 |
| Интегрированный комплекс физической защиты периметров и территорий объектов | 2019 |
|
RU2726942C1 |
| Беспроводная самоорганизующаяся сетевая система мониторинга охраняемой территории | 2016 |
|
RU2620239C1 |
Робототехническая система для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора содержит центральный пост охраны с приемопередающей антенной, по меньшей мере один беспилотный летательный аппарат-инспектор, содержащий механизм перемещения, секцию управления перемещением по заданной траектории, приемопередающую антенну дальней радиосвязи и видеокамеру. Система также содержит станции подзарядки, множество пунктов охранной сигнализации, снабженных аппаратурой спутниковой навигации и радиоканалом с ближней зоной действия. Обеспечивается автоматизация обзора местности, а также автоматизация процесса проверки технического состояния пунктов охранной сигнализации. 1 ил.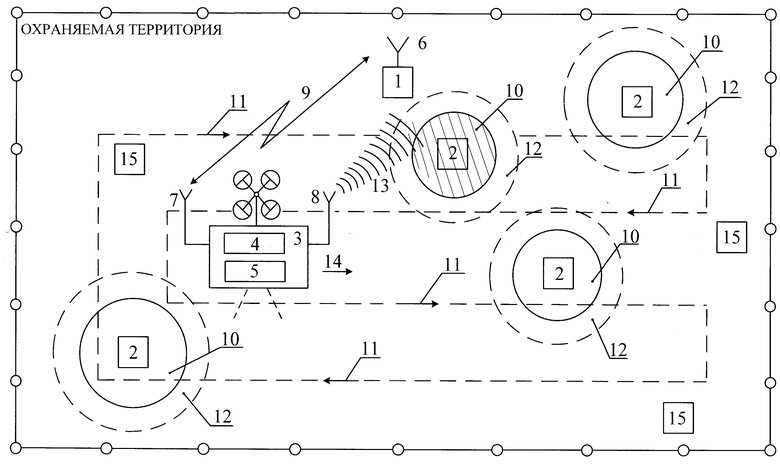
Робототехническая система для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора, содержащая центральный пост охраны с приемопередающей антенной, а также по меньшей мере один автономный мобильный робот, который выполнен с возможностью перемещения по заданной траектории с целью патрулирования местности, содержащий механизм перемещения, секцию управления перемещением по заданной траектории, приемопередающую антенну дальней радиосвязи с центральным постом охраны и видеокамеру, отличающаяся тем, что в качестве автономного мобильного робота используется беспилотный летательный аппарат-инспектор, а робототехническая система дополнительно содержит станции подзарядки для беспилотного летательного аппарата-инспектора и множество пунктов охранной сигнализации с номерами 1- n, расположенных на территории охраняемого объекта и образующих зоны обнаружения нарушителей, каждый из пунктов охранной сигнализации наделен аппаратурой спутниковой навигации GPS/ГЛОНАСС и радиоканалом связи с ближней зоной действия, в состав беспилотного летательного аппарата-инспектора введены блок электронный и приемопередающая антенна ближней радиосвязи, в секцию управления перемещением по заданной траектории дополнительно введена аппаратура спутниковой навигации GPS/ГЛОНАСС, а беспилотный летательный аппарат-инспектор выполнен с дополнительными возможностями:
- патрулирования с видеосъемкой местности охраняемой территории при полете по определенному маршруту, причем с возможностью поочередного образования ближних радиоканалов связи с пунктами охранной сигнализации при вхождении в зоны их ближней радиосвязи;
- осуществления проверки технического состояния каждого пункта охранной сигнализации после образования с ним ближнего радиоканала связи путем считывания необходимой информации из его памяти;
- осуществления видеосъемки местности в окрестностях зоны обнаружения каждого из пунктов охранной сигнализации с помощью видеокамеры по команде от центрального поста охраны для проверки состояния зоны обнаружения и анализа тревожных ситуаций с дальнейшей передачей информации на центральный пост охраны;
- встраивания в систему функционирования одного из пунктов охранной сигнализации для идентификации объекта-нарушителя с использованием видеоизображений при обмене информацией с данным пунктом охранной сигнализацией и центральным постом охраны;
- сопровождения объекта-нарушителя по территории объекта охраны с продолжением видеонаблюдения и сообщением дополнительной информации в центральный пост охраны;
- осуществления инициализации пунктов охранной сигнализации, находящихся в «спящем» (sleep) режиме, при обнаружении возможных угроз в ходе видеосъемки при патрулировании местности.
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС БЕСПИЛОТНОГО ВОЗДУШНОГО МОНИТОРИНГА | 2015 |
|
RU2612754C1 |
| KR 102192797 B1, 18.12.2020 | |||
| US 20170330466 A1, 16.11.2017 | |||
| БЕСПИЛОТНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОГО МОНИТОРИНГА И БЛОКИРОВАНИЯ ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ВОЗДУШНЫМИ РОБОТАМИ, ОСНАЩЕННЫЙ ИНТЕГРИРОВАННОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ПО ОБЕСПЕЧЕНИЮ ТРЕБУЕМОЙ ЭФФЕКТИВНОСТИ ИХ ПРИМЕНЕНИЯ | 2007 |
|
RU2353891C1 |

