Изобретение относится к техническим средствам охраны территории объектов и может быть использовано для обнаружения нарушителя, проникающего через зону обнаружения протяженного рубежа охраны.
Известно устройство обнаружения проникновения человека через контур запрещенной зоны (см. патент РФ 2209467, С2. кл. G08B 13/16 (2000.01) опубл. 27.07.2003 Бюл. №21), содержащее расположенные по контуру сейсмические приемники, включающие в себя сейсмические датчики в виде геофонов с преимущественной чувствительностью к вертикальной составляющей сейсмического поля, предварительные дифференциальные и парафазные усилители, соединенные протяженным кабелем с аппаратурой поста наблюдения, содержащей приемные модули информации со вторыми дифференциальными усилителями, систему цифровой обработки и блок питания постоянного электрического тока.
Недостатком известного решения является низкая вероятность обнаружения нарушителя, его классификацию и сопровождение, так как осуществляется только спектрально-энергетическая обработка сигнала, согласованная с особенностями спектра одиночного сигнала от шагающего человека, что при наличии группы движущихся нарушителей или использовании нарушителем средств снижения шума будет приводить к снижению точности определения факта их проникновения через рубеж охраны, их классификацию и сопровождение как цели, кроме того необходимо наличие большого количества сейсмических приемников для охраны протяженных рубежей.
Известны также ряд устройств охраны объектов: «Устройство определения степени возмущения оптического волокна, установленного по периметру охраняемого контура за счет микровибраций, возникающих при преодолении защитного барьера» (см. Волоконно-оптическая система ТСО "СОВА", О.В. Горбачев, Информост- радиоэлектроника и телекоммуникации №1 (43) 2006); «Устройство определения степени и места возмущения охраняемого контура в волоконно-оптических системах» (см. Распределенные волоконно-оптические системы для охраны периметра: перспективные технологии, П. Иванченко, В. Красовский, Алгоритм безопасности, №4, 2003); «Устройство определения степени и места возмущения волоконно-оптической системы при охране объекта» (см. патент РФ 2007122828/28 от 18.06.2007. автор Хопов В.В.); «Устройство определения степени и места возмущения зонной волоконно-оптической системы охраны объектов» (см. патент РФ 2695415, С2. кл. G08B 13/186 (2006.01) опубл. 23.07.2019 Бюл. №21). В известных устройствах в качестве чувствительного элемента используют оптическое волокно, при возмущении которого микро вибрациями и микро изгибами в любом месте контура происходит изменение спектр-структуры света на выходе волокна. Регистрация этого изменения позволяет судить о проникновении через рубеж охраны.
Недостатком известных устройств является низкая вероятность обнаружения нарушителя, так как определяют только место возмущения оптического волокна на границе охраняемого рубежа, при этом в качестве такого события, может выступить не только нарушитель, но и упавшее дерево или животное, а также невозможность его сопровождения после преодоления охраняемого рубежа.
Наиболее близкой по технической сущности к заявленному устройству (прототипом) является робототехническое устройство для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора (см. патент РФ 2756335, С1. кл. В64С 39/02 (2006.01), G08B 13/00 (2006.01) G08B 25/00 (2006.01), опубл. 29.09.2021 Бюл. №28), содержащая центральный пост охраны с приемопередающей антенной, а также по меньшей мере один беспилотный летательный аппарат-инспектор, который выполнен с возможностью перемещения по заданной траектории с целью патрулирования местности, содержащий механизм перемещения, секцию управления перемещением по заданной траектории, приемопередающую антенну дальней радиосвязи с центральным постом охраны и видеокамеру, робототехническая система содержит станции подзарядки для беспилотного летательного аппарата-инспектора и множество пунктов охранной сигнализации с номерами 1-n, расположенных на территории охраняемого объекта и образующих зоны обнаружения нарушителей, каждый из пунктов охранной сигнализации наделен аппаратурой спутниковой навигации GPS/ГЛОНАСС и радиоканалом связи с ближней зоной действия, беспилотный летательный аппарат-инспектор содержит блок электронный, приемопередающую антенну ближней радиосвязи, секцию управления перемещением по заданной траектории с аппаратурой спутниковой навигации GPS/TJIOHACC, а беспилотный летательный аппарат-инспектор выполнен с возможностями: патрулирования с видеосъемкой местности охраняемой территории при полете по определенному маршруту, причем с возможностью поочередного образования ближних радиоканалов связи с пунктами охранной сигнализации при вхождении в зоны их ближней радиосвязи; осуществления проверки технического состояния каждого пункта охранной сигнализации после образования с ним ближнего радиоканала связи путем считывания необходимой информации из его памяти; осуществления видеосъемки местности в окрестностях зоны обнаружения каждого из пунктов охранной сигнализации с помощью видеокамеры по команде от центрального поста охраны для проверки состояния зоны обнаружения и анализа тревожных ситуаций с дальнейшей передачей информации на центральный пост охраны; встраивания в систему функционирования одного из пунктов охранной сигнализации для идентификации объекта-нарушителя с использованием видеоизображений при обмене информацией с данным пунктом охранной сигнализацией и центральным постом охраны; сопровождения объекта-нарушителя по территории объекта охраны с продолжением видеонаблюдения и сообщением дополнительной информации в центральный пост охраны; осуществления инициализации пунктов охранной сигнализации, находящихся в«спящем» (sleep) режиме, при обнаружении возможных угроз в ходе видеосъемки при патрулировании местности.
Устройство-прототип содержит по меньшей мере один беспилотный летательный аппарат (БПЛА), который обеспечивает патрулирование с видеосъемкой местности охраняемой территории при полете по определенному маршруту.
Однако устройство-прототип имеет недостаток: низкую вероятность обнаружения нарушителя, объясняемую необходимостью постоянного перемещения БПЛА по заданной траектории с целью патрулирования местности, что снижает вероятность обнаружения нарушителя при приближении и преодолении им рубежа охраны сразу после его пролета и удаления внутрь него на расстояние, когда при следующем пролете местности в окрестностях зоны обнаружения нарушитель обнаружен не будет. Кроме того, для обмена информацией между БПЛА с центральным постом охраны используют радиолинию дальней радиосвязи, на которую могут воздействовать преднамеренные и непреднамеренные помехи, что затруднит передачу информации о состоянии зоны обнаружения и анализа тревожных ситуаций при преодолении нарушителем рубежа охраны. Кроме того, на канал спутниковой навигации GPS/ГЛОНАСС БПЛА могут воздействовать преднамеренные помехи, что нарушит его перемещение по заданной траектории при охране протяженных рубежей.
Техническим результатом при использовании заявляемого устройства является повышение вероятности обнаружения нарушителя на протяженных рубежах охраны в сложной помеховой обстановке.
Для достижения сформулированного технического результата в известном устройстве контроля протяженных рубежей охраны, содержащем центральный пост охраны, по меньшей мере один беспилотный летательный аппарат (БПЛА) А и модуль управления БПЛА, дополнительно введены по меньшей мере один модуль запуска/посадки беспилотного летательного аппарата Z, при этом Z - А, по меньшей мере один распределенный акустический сенсор. Распределенный акустический сенсор содержит не менее трех токопроводящих проводов, один из которых подключен к генератору электрического поля, а два других к модулю электропитания, и не менее одного оптического волокна, подключенного между модулем волоконно-оптической системы передачи со спектральным разделением каналов (ВОСП-СР), и, по меньшей мере, одним оптическим приемопередатчиком. Оптический приемопередатчик соединен с соответствующим радиочастотным приемопередатчиком, электропитание которого осуществляется по двум токопроводящим проводам модулем электропитания. Модуль ВОСП-СР соединен с модулем управления БПЛА и модулем анализа сигналов соединенного с модулем памяти. БПЛА содержит датчик измерения напряженности электрического поля, радиочастотный приемопередатчик, блок навигации, видеокамеру и тепловизор.
Благодаря новой совокупности существенных признаков за счет введения распределенного акустического сенсора и беспилотного летательного аппарата обеспечивается регистрация координат изменения спектр-структуры света на выходе акустического сенсора, вылет к этому месту БПЛА по сигналам с датчика измерения напряженности электрического поля, определение нарушителя и его сопровождения. Этим достигается повышение вероятности обнаружения нарушителя на протяженном рубеже охраны и сопровождения его в сложной помеховой обстановке.
Заявленное устройство поясняется чертежами:
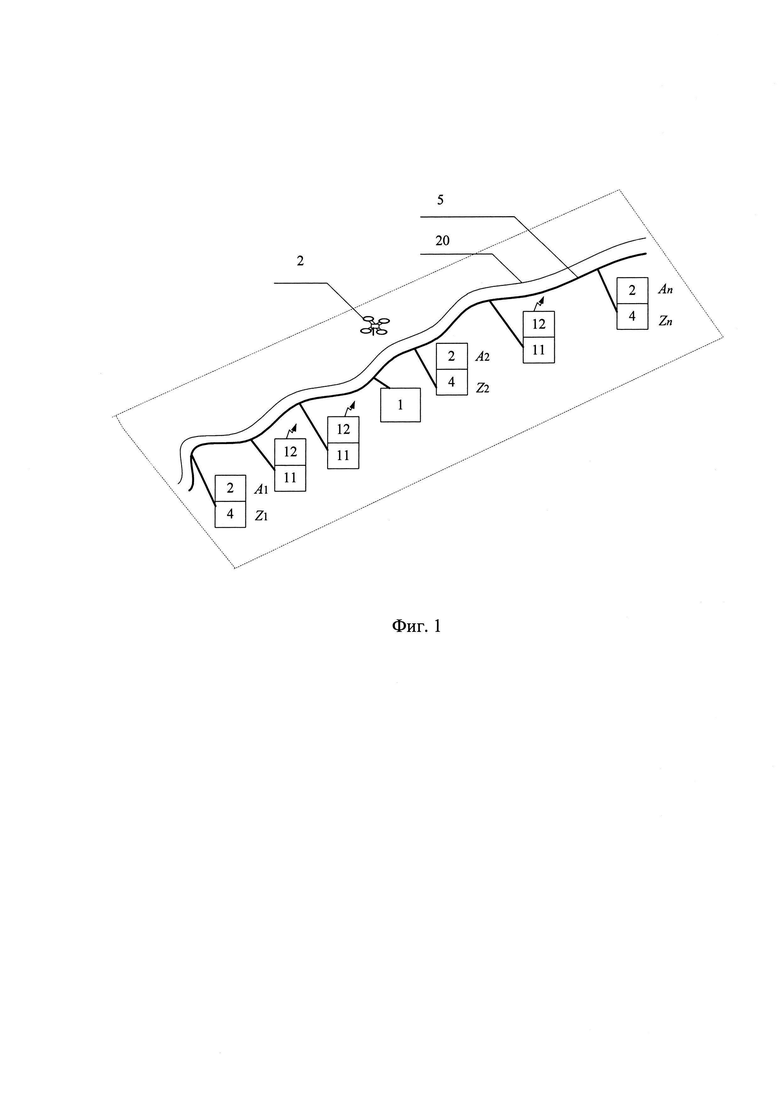
фиг. 1 - схема устройства контроля протяженных рубежей охраны;
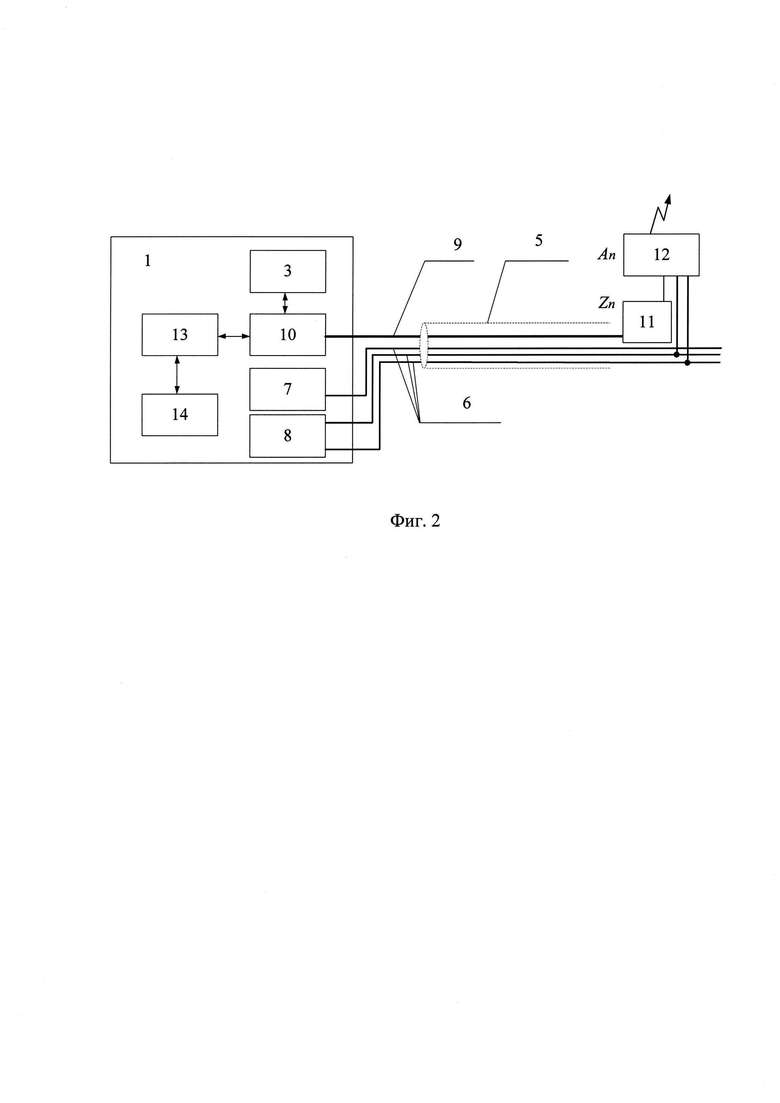
фиг. 2 - схема подключения акустического сенсора к центральному посту охраны;
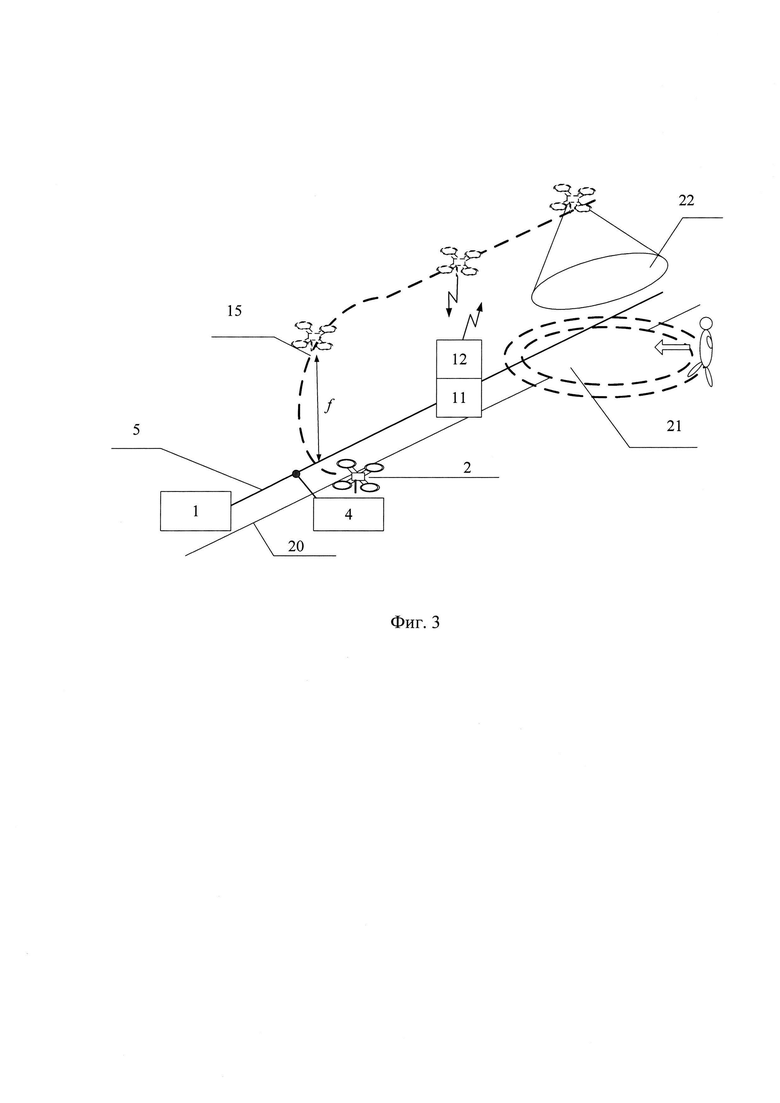
фиг. 3 - схема пояснения принципа работы устройства контроля протяженных рубежей охраны;
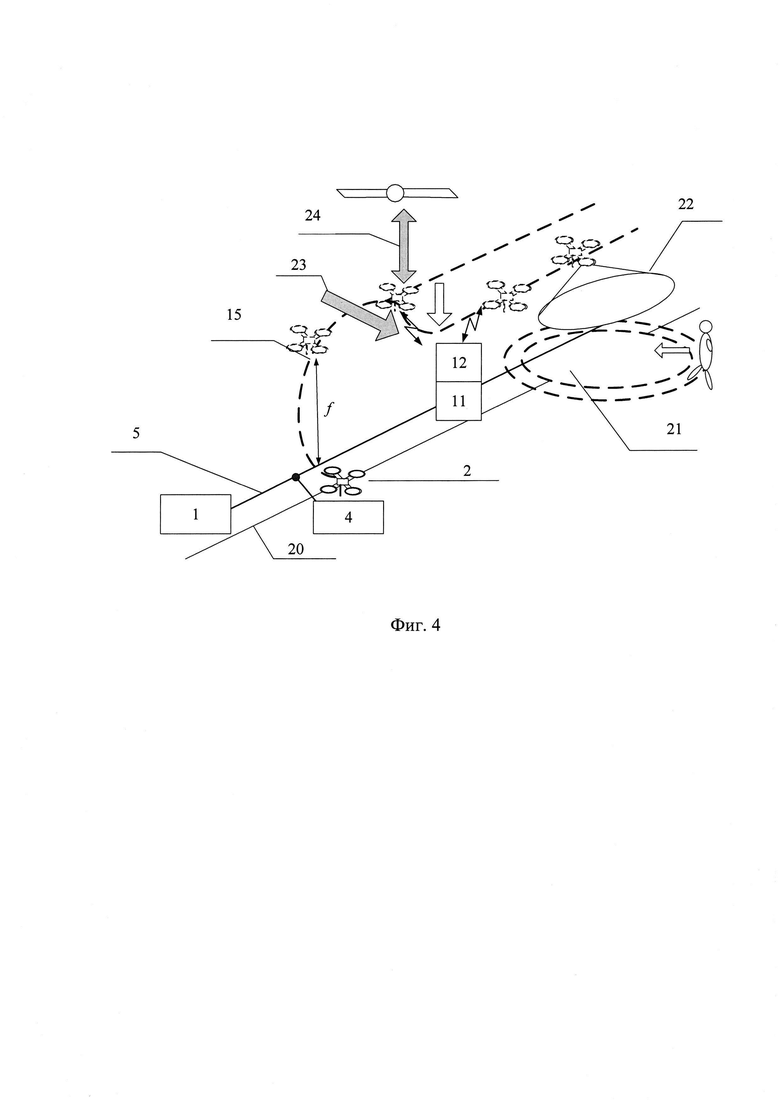
фиг. 4 - схема пояснения принципа работы устройства контроля протяженных рубежей охраны в сложной помеховой обстановке.
Заявленное устройство, показанное на фиг. 1, содержит центральный пост охраны 1, по меньшей мере один беспилотный летательный аппарат БПЛА 2, распределенный акустический сенсор 5, располагаемый вдоль протяженных рубежей охраны 20.
На центральном посту охраны 1 (фиг. 2) размещают: модуль управления БПЛА 3, модуль волоконно-оптической системы передачи со спектральным разделением каналов 10, модуль анализа сигналов 13, модуль памяти 14 и генератор электрического поля 7. К центральному посту охраны 1 подключают распределенный акустический сенсор 5. Распределенный акустический сенсор 5 содержит не менее трех токопроводящих проводов 6 и не менее одного оптического волокна 9. Один из токопроводящих проводов 6 подключен к генератору электрического поля 7, который генерирует поле на определенной перестраиваемой частоте f, а два других к модулю электропитания 8. К оптическому волокну 9 распределенного акустического сенсора 5 подключают N радиочастотных приемопередатчиков 12, каждый из которых соединен через соответствующий оптический приемопередатчик 11 с модулем ВОСП-СР 10 расположенным на центральном посту охраны 1.
Беспилотный летательный аппарат 2 содержит датчик измерения напряженности электрического поля 15, радиочастотный приемопередатчик 16, блок навигации 17, видеокамеру 18 и тепловизор 19. БПЛА 2 во время полета к месту регистрации координат изменения спектр-структуры света на выходе акустического сенсора 5 ориентируют по показаниям с датчика измерения напряженности электрического поля 15, получающего сигналы с частотой f от распределенного акустического сенсора 5, проложенного вдоль рубежа охраны и вырабатываемых в свою очередь генератором электрического поля 7. Кроме того БПЛА 2 ориентируют в пространстве по навигационным сигналам, например от ГЛОНАСС, принимаемых блоком навигации 17.
Центральный пост охраны 1 предназначен для сбора и анализа информации о состоянии охраняемой границы протяженной территории и управления беспилотным летательным аппаратом.
Модуль волоконно-оптической системы передачи со спектральным разделением каналов 10 предназначен для формирования типовых каналов и трактов передачи с использованием в качестве направляющей среды оптического кабеля и передачей по нему оптических сигналов [см. Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, P.M. Шарафутдинов. Под ред. Профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368 с: ил. стр. 12]. Спектральным уплотнением, или волновым мультиплексированием, или мультиплексирование по длинам волн (WDM - Wavelength Division Multiplexing) называют передачу нескольких сигналов в одном оптическом волокне на разных длинах волн (несущих), соответствующих частотному плану Сектора по стандартизации телекоммуникаций Международного союза электросвязи ITU-T [см. Листвин В.Н., Трещиков В.Н. DWDM-системы. Москва: Техносфера, 2015. - 296 с., стр. 8]. Под оптическим сигналом понимают модулированное оптическое излучение определенной длины волны. Модуль ВОСП-СР 10 может быть реализован в различных вариантах, например, в виде оборудования «Волга» с блоком мультиплексора ОМ-40-AV-PM, который обеспечивает формирование 40 номиналов длин волн, соответствующих диапазону МСЭ-Т G.694.1 [см. Оборудование волоконно-оптической системы передачи со спектральным уплотнением «Волга». Блок мультиплексора OM-40-AV-PM. Руководство по эксплуатации ТВСЕ.433771.050 РЭ]. Модуль волоконно-оптической системы передачи со спектральным разделением каналов 10 обеспечивает прием на одной длине волны сигналов с распределенного акустического сенсора о координатах изменения спектр-структуры света на выходе акустического сенсора, а на других длинах волн сигналы с оптических приемопередатчиков 11.
Оптический приемопередатчик 11 предназначен для преобразование электрического сигнала в оптический сигнал, длина волны которого совпадает с одним из окон прозрачности оптического волокна и обратное преобразование его на приемной стороне. Схемы оптических приемопередатчиков 11 известны и описаны, например, в книге Оптические телекоммуникационные системы. Учебник для вузов / В.Н. Гордиенко, В.В. Крухмалев, А.Д. Моченов, P.M. Шарафутдинов. Под ред. Профессора В.Н. Гордиенко. - М: Горячая линия - Телеком, 2011. - 368 с: ил. стр. 15 и может быть реализован, например, на основе модуля SFP FG-FO-S1.1-S-s(LC).
Модуль анализа сигналов 13 предназначен для первичной обработки и конвертирования оптических сигналов с распределенного акустического сенсора 5. Модуль анализа сигналов 13 может быть реализован в различных вариантах, например, в виде программно-аппаратного комплекса (ПАК) с системой распознавания на основе машинного обучения и нейронных сетей, например ПАК «Дунай», представляющего собой устройство для мониторинга виброакустической характеристики протяженного объекта с системой распознавания на основе машинного обучения и нейронных сетей [см. Т8 Сенсор (t8-sensor.ru), Электронный ресурс.- Режим доступа: https://t8.ru/wp-content/uploads/2022/08/T8-Sensor_web_2022_rus.pdf, вход свободный].
Модуль памяти 14 предназначен для хранения информации о характеристиках различных объектов, которые могут быть объектами приближающимися или находящимися на рубеже охраны и приводящими к изменению спектр-структуры света на выходе акустического сенсора. В память записывают типовые варианты изменения спектр-структуры света на выходе акустического сенсора для каждого такого объекта, например человека, автомобиля и др. Схемы модуля памяти 11 известны и показаны, например, в книге В.В. Стрыгина, Л.С. Щарева «Основы вычислительной микропроцессорной техники и программирования» (М.: Высшая школа, 1989 г.) и может быть реализован, например, на основе микросхем типа AM29DL800BB.
Генератор электрического поля 7 предназначен для создания электрического поля с заданной напряженностью. Схемы генераторов электрического поля 7 известны и описаны, например, в книге В.П. Дьяконов «Генерация и генераторы сигналов», 2009 г. В частности, такая схема может быть реализована на базе генератора ГЗЧ-2500.
Распределенный акустический сенсор 5 предназначен для непрерывного мониторинга виброакустических событий вдоль оптоволоконного кабеля. В качестве чувствительного элемента, как правило, используют стандартное телекоммуникационное одномодовое волокно (G.652, G.655, G.657). Схемы акустического сенсора 5 известны и описаны, например, в патенте RU №128372 U1, опубл. 20.05.2013 «Волоконно-оптическое охранное устройство на основе рэлеевского рассеяния»; патенте RU №2801071 С1, опубл. 01.08.2023 «Устройство для мониторинга виброакустической характеристики протяженного объекта с системой распознавания на основе машинного обучения и нейронных сетей».
Радиочастотные приемопередатчики 12 и 16 предназначены для приема и передачи информации между БПЛА 2 и модулем управления БПЛА 3. От БПЛА 2 передается изображение с видеокамеры 18, тепловизора 19, а также может передаваться телеметрическая информация о состоянии БПЛА и параметрах его полета, а от модуля управления БПЛА 3 управляющие сигналы, например по корректировке курса полета. К распределенному акустическому сенсору 5 подключен по меньшей мере один радиочастотный приемопередатчик 12. Их количество зависит от протяженности охраняемого рубежа. Наличие N приемопередатчиков 12 позволяет сделать радиочастотные приемопередатчики 12 и 16 маломощными, так как передача информации между ними осуществляется на малых расстояниях, например, непосредственно при пролете БПЛА 2 над очередным радиочастотным приемопередатчиком 12. Это в свою очередь позволяет повысить скрытность БПЛА 2 и обеспечить управление им в сложной помеховой обстановке. Схемы радиочастотных приемопередатчиков 12 и 16 известны и описаны, например, в книге Л.А. Белова, М.В., Благовещенского, В.М. Богачева и др. «Радиопередающие устройства» под ред. М.В. Благовещенского, Г.М. Уткина, М. Радио и связь, 1982 г. и могут быть выполнены на интегральной микросхеме СМХ992 - передатчик, интегральной микросхеме СМХ994 - приемник и СМХ902 - усилитель мощности.
Беспилотный летательный аппарат 2 предназначен для вылета к месту регистрации координат изменения спектр-структуры света на выходе акустического сенсора 5 и визуального контроля за охраняемой границы территории, как в месте регистрации координат события, так и на определенном участке границы, в том числе и сопровождения проникнувшего объекта за ее пределы и удаления от нее вглубь. Для охраны границы протяженной территории могут использованы М количество БПЛА, установленных на L расстоянии друг от друга в зависимости от характеристик самого БПЛА: скорости полета, времени полета с учетом возвращения к месту взлета и сопровождения объекта-нарушителя границы до прибытия охранной группы. Беспилотный летательный аппарат 2 может быть реализован в различных вариантах, например, в виде летательного аппарата, выполненного по нормальной аэродинамической схеме с возможностью вертикального взлета и посадки [см. В.М. Корнеев. Особенности конструкции и эксплуатации беспилотных летательных аппаратов самолетного типа, 2018 г; В.Я. Петраш. Баллистическое и массово-геометрическое проектирование беспилотных ЛА в учебной САПР, МАИ, 2020 г.].
Датчик измерения напряженности электрического поля 15 предназначен для фиксации параметров индукционного наведенного поля на различных допустимых высотах полета на установленной частоте, выработанного генератором электрического поля и передаваемого по одному из токопроводящих проводов 6 распределенного акустического сенсора 5. В качестве датчика измерения напряженности электрического поля 15 может использована одна из известных схем, например, приведенная в патенте SU 1711110 А1, опубл. 07.02.92 Бюл. №5 «Датчик измерителя напряженности электрического поля в среде».
Блок навигации 17 предназначен для определения пространственных координатах, вектора скорости, текущего времени и других навигационных параметров, полученных в результате приема и обработки радиосигналов от навигационных спутников. В качестве блока навигации 17 может быть использована одна из известных схем, например приведенная в патенте RU 132218 U1, опуб. 10.09.2013 «Спутниковый навигационный приемник ГЛОНАСС/GPS».
Видеокамера 18 предназначена для получения оптических образов снимаемых объектов на светочувствительном элементе, приспособленное для записи движущихся изображений. В качестве видеокамеры 18 может быть использована одна из известных схем, например, приведенная в статье Скидан, Д.Е. Системы видеосопровождения для беспилотного летательного аппарата/ Д.Е. Скидан. - Текст: непосредственный // Молодой ученый. №22 (102). - С. 187-191. - URL: http:moluch.ru/archive/102/23109/ (дата обращения: 31.0.2023).
Тепловизор 19 предназначен для наблюдения за распределением температуры исследуемой поверхности. В качестве тепловизора 19 может быть использована одна из известных схем, например приведенная в книге Колючкин В.Я., Мосягин Г.М. Тепловизионные приборы и системы. Учебное пособие. М.: МГТУ им. Н.Э. Баумана, 2000.
Устройство работает следующим образом. При приближении нарушителя к рубежу охраны (фиг. 3) распределенный акустический сенсор 5 фиксирует координаты 21 изменения спектр-структуры света. На центральном посту охраны 1 в автоматическом или ручном режиме оператор определяет ближайший к нему модуль запуска/посадки БПЛА 4 и включает находящийся на нем БПЛА 2. БПЛА 2 осуществляет вылет, ориентируясь при полете с помощью датчика измерения напряженности электрического поля 15, получающего сигналы с частотой / от распределенного акустического сенсора 5, проложенного вдоль рубежа охраны и вырабатываемых в свою очередь генератором электрического поля 7. Кроме того БПЛА 2 во время полета для уточнения своего положения в пространстве принимает с помощью блока навигации 17 навигационные сигналы, например от ГЛОНАСС. Беспилотный летательный аппарат 2 при пролете вдоль проложенного распределенного акустического сенсора 5 передает при помощи радиочастотного приемопередатчика 16 информацию с видеокамеры 18 и тепловизора 19, поочередно на N радиочастотные приемопередатчики 12. Передачу информации от текущего радиочастотного приемопередатчика 12 к последующему осуществляют эстафетно, исходя из уровня принимаемого сигнала от очередного радиочастотного приемопередатчика 12. Принятую радиочастотным приемопередатчиком 12 информацию передают на соответствующий взаимодействующий оптический приемопередатчик 11, где преобразуют из электрического вида в оптический и по оптическому волокну 9 распределенного акустического сенсора 5 передают на модуль ВОСП-СР 10, расположенный на центральном посту охраны 1. На центральном посту охраны 1 оператор наблюдает за обстановкой при пролете вдоль рубежа охраны и в месте регистрации координат изменения спектр-структуры света на выходе акустического сенсора 5. При необходимости оператор через модуль управления БПЛА 3 может подать управляющие сигналы на БПЛА 2 через модуль ВОСП-СР 10 по оптическому волокну 9 на ближайший к нему радиочастотный приемопередатчик 12. Радиочастотный приемопередатчик 16 БПЛА 2 принимает данные управляющие сигналы и корректирует курс для поиска нарушителя на месте регистрации координат изменения спектр-структуры света, например для его поиска вглубь от границы охраняемого рубежа 22 или его сопровождения при удалении от места пересечения охраняемого рубежа. При поиске нарушителя используют установленные на БПЛА 2 видеокамера 18 и тепловизор 19, что делает возможным его определение, в том числе и в условиях недостаточной видимости.
В случае наличия помех 23 (фиг. 4) между радиочастотным приемопередатчиком 12 и радиочастотным приемопередатчиком 16 БПЛА он снижает высоту полета, тем самым уменьшая протяженность радиолинии до высоты, обеспечивающей уверенный прием и передачу сигнала или движется по сигналам GPS/ГЛОНАСС. При подавлении канала спутниковой навигации 24 GPS/ГЛОНАСС БПЛА 2 ориентируют только по показателям с датчика измерения напряженности электрического поля 15 до пролета зоны подавления.
Наличие в устройстве распределенного акустического сенсора и беспилотного летательного аппарата позволяет осуществить точное определение координат изменения спектр-структуры света на выходе акустического сенсора охраняемого рубежа, сократить время классификации объекта за счет вылета к этому месту БПЛА с ближайшего модуля запуска/посадки и его сопровождения. При этом управление БПЛА осуществляется по сигналам с распределенного акустического сенсора и по радиоканалам незначительной протяженности, что делает возможным управление БПЛА в сложной помеховой обстановке. Этим достигается повышение вероятности обнаружения нарушителя на протяженном рубеже охраны и сопровождения его в сложной помеховой обстановке, т.е. достигается сформулированный технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| Робототехническая система для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора | 2021 |
|
RU2756335C1 |
| Мобильный быстроустанавливаемый автономный пост технического наблюдения для контроля обстановки на охраняемой территории на базе аэромодуля на привязи | 2021 |
|
RU2759977C1 |
| Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами | 2024 |
|
RU2838977C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| КОМПЛЕКС ОХРАНЫ МЕСТНОСТИ С ПРИМЕНЕНИЕМ БЕСПИЛОТНОГО ВОЗДУШНОГО СРЕДСТВА | 2024 |
|
RU2834502C1 |
| СПОСОБ ОХРАНЫ ОБЪЕКТОВ ОТ ПРОНИКНОВЕНИЯ ДИСТАНЦИОННО УПРАВЛЯЕМЫХ МАЛОРАЗМЕРНЫХ МАЛОВЫСОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (ТИПА БПЛА) | 2019 |
|
RU2744497C2 |
Изобретение относится к техническим средствам охраны территории объектов и может быть использовано для обнаружения нарушителя, проникающего через зону обнаружения протяженного рубежа охраны. Техническим результатом заявляемого изобретения является повышение вероятности обнаружения нарушителя на протяженных рубежах охраны в сложной помеховой обстановке. Технический результат достигается тем, что устройство содержит центральный пост охраны, по меньшей мере один беспилотный летательный аппарат (БПЛА) А и модуль управления БПЛА, по меньшей мере один модуль запуска/посадки беспилотного летательного аппарата Z, при этом Z=А, по меньшей мере один распределенный акустический сенсор, содержащий не менее трех токопроводящих проводов, один из которых подключен к генератору электрического поля, а два других к модулю электропитания, и не менее одного оптического волокна, подключенного между модулем волоконно-оптической системы передачи со спектральным разделением каналов (ВОСП-СР) и по меньшей мере одним оптическим приемопередатчиком, соединенного с соответствующим радиочастотным приемопередатчиком, электропитание которого осуществляется по двум токопроводящим проводам модуля электропитания, модуль ВОСП-СР соединен с модулем управления БПЛА и модулем анализа сигналов, соединенным с модулем памяти, а БПЛА содержит датчик измерения напряженности электрического поля, радиочастотный приемопередатчик, блок навигации, видеокамеру и тепловизор. 4 ил.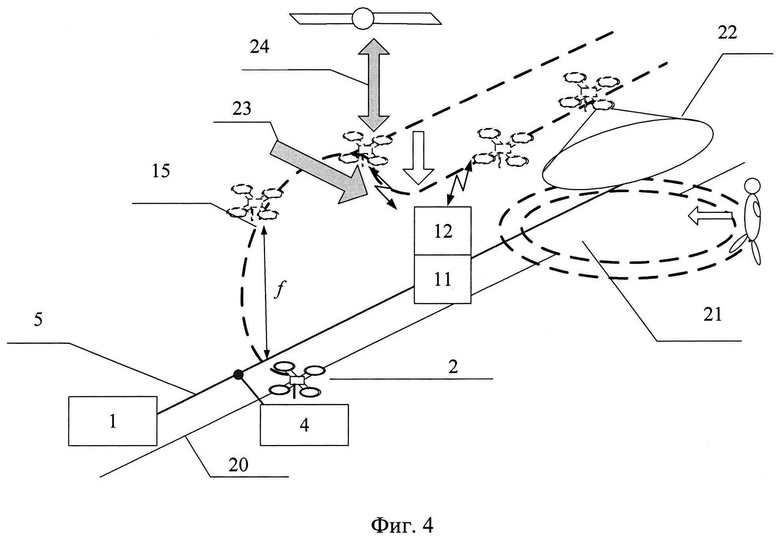
Устройство для контроля протяженных рубежей охраны, содержащее центральный пост охраны (1), по меньшей мере один беспилотный летательный аппарат (БПЛА) А (2) и модуль управления БПЛА (3), отличающееся тем, что дополнительно введены по меньшей мере один модуль запуска/посадки беспилотного летательного аппарата Z (4), при этом Z=А, по меньшей мере один распределенный акустический сенсор (5), содержащий не менее трех токопроводящих проводов (6), один из которых подключен к генератору электрического поля (7), а два других к модулю электропитания (8), и не менее одного оптического волокна (9), подключенного между модулем волоконно-оптической системы передачи со спектральным разделением каналов (ВОСП-СР) (10) и по меньшей мере одним оптическим приемопередатчиком (11), соединенного с соответствующим радиочастотным приемопередатчиком (12), электропитание которого осуществляется по двум токопроводящим проводам (6) модулем электропитания (8), модуль ВОСП-СР (10) соединен с модулем управления БПЛА (3) и модулем анализа сигналов (13), соединенным с модулем памяти (14), а БПЛА (2) содержит датчик измерения напряженности электрического поля (15), радиочастотный приемопередатчик (16), блок навигации (17), видеокамеру (18) и тепловизор (19).
| Робототехническая система для охраны территории объекта с использованием беспилотного летательного аппарата-инспектора | 2021 |
|
RU2756335C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ КОМПЛЕКС ДИАГНОСТИКИ ПРОТЯЖЕННЫХ ОБЪЕКТОВ, ОСНАЩЕННЫХ СОБСТВЕННОЙ ИНФОРМАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2343438C1 |
| Интеллектуальная система автоматического дистанционного мониторинга состояния ЛЭП | 2022 |
|
RU2789896C1 |
| Устройство для мониторинга виброакустической характеристики протяженного объекта с системой распознавания на основе машинного обучения и нейронных сетей | 2023 |
|
RU2801071C1 |

