ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству и способу для манипулирования прутками, в частности, металлическими прутками.
Термин «прутки» включает в себя продукты продолговатой формы, такие как, например, стержни, арматурные стержни, прутки, круглые куски, квадратные прутки и т. п. Таким образом, прутки могут быть использованы, например, в строительной отрасли.
Настоящие устройство и способ позволяют, в частности, получать группы или подгруппы прутков в зависимости от конкретных целей использования прутков и, следовательно, в зависимости от потребностей пользователя, нуждающегося в прутках, которые, естественно, могут быть подвергнуты последующей обработке в соответствии с их конкретным применением.
УРОВЕНЬ ТЕХНИКИ
Известно, что в сфере распределения и продажи металлических прутков существует потребность в обеспечении конечного пользователя металлическими прутками в требуемом и предварительно определенном количестве.
Также известно, что металлические прутки, обычно производимые в процессе прокатки или вытяжки, поставляют дистрибьютору в виде пучков прутков, собранных вместе.
Пучки прутков подразделяют по типу, например, в соответствии с размерами поперечных сечений, длиной, видом материала, из которого они изготовлены, формой поперечного сечения и т. п.
Также известно, что прутки чрезвычайно длинные, например, 6, 8, 10 или 12 метров, и при сборе в пучки спутываются друг с другом, так что выделить их из пучка крайне трудно.
В настоящее время операции по выделению прутков и подсчету их для доставки конечному покупателю выполняют вручную с огромными сложностями и рисками для операторов.
Также известно, что для предоставления конечному покупателя требуемого количества прутков их количество оценивают по общему весу, который должны иметь эти прутки.
Однако при таком решении неизбежны ошибки, так как прутки могут отличаться по весу друг от друга и потому вносить искажения в расчетную количественную оценку.
В этой связи известно, что в области распределения прутков существует потребность в создании устройства, которое позволяет поставлять конечному покупателю предварительно определенное количество прутков.
В области механической обработки известны машины для обработки металлических прутков, в основном гибочные машины и машины для изготовления арматурных хомутов, которые обрабатывают один или более прутков одновременно, например, с целью создания фасонных скоб для строительной отрасли или продуктов другого типа. Эти машины обслуживаются складскими зонами, которые обычно имеют один или более контейнеров, например, расположенных на перемещающихся ползунах, в которых находятся пучки прутков, и из которых каждый раз извлекают прутки, подлежащие отправке на определенную обработку.
Например, в документе WO-A-2012/120361 описано устройство для извлечения по меньшей мере одного прутка из пучка прутков.
Это устройство содержит по меньшей мере один блок подъема, пригодный для подъема по меньшей мере одного концевого сегмента прутка относительно пучка, и блок экстрактора, пригодный для выделения прутка из пучка. Блок подъема содержит средство захвата и удержания, пригодное для удержания, по меньшей мере временно, поднятого концевого сегмента прутка. Блок экстрактора содержит множество элементов экстрактора, выполненных с возможностью перемещения в по меньшей мере одном из их рабочих режимов между пучком и поднятым концевым сегментом прутка, который нужно извлечь, и последующего постепенного взаимного перемещения от поднятого концевого сегмента, а также от блока подъема в направлении, по существу параллельном продольной протяженности пучка, и к одному концу прутка, противоположному поднятому концевому сегменту.
Данное устройство имеет очевидные преимущества с точки зрения автоматизации выделения, по меньшей мере, одного прутка из пучка прутков без необходимости вмешательства операторов.
Однако в таких выводящих машинах или устройствах прутки впоследствии подают непосредственно в обрабатывающую машину, где в операциях выбора и группирования прутков в различные группы или подгруппы нет необходимости. Под операциями выбора мы понимаем, например, подсчет, группирование и взвешивание металлических прутков.
Известны также устройства для манипулирования прутками, например, описанные в документах DE-A-40.35.345 и US-A-3.712.458, которые включают в себя панель подачи прутков к блоку селектора. Блок селектора выполнен с возможностью извлечения по одному прутку за раз и подачи его в пункт сбора, где формируют комплект из предварительно определенного количества прутков.
Блок селектора снабжен устройством обнаружения, выполненным с возможностью определения количества прутков, доставленных в пункт сбора.
В DE-A-40.35.345 блок селектора оборудования зубчатым колесом, или зубчатым ремнем, зубья которого имеют соответствующую конфигурацию для приема и транспортировки по одному прутку за раз с панели подачи в пункт сбора. Данное решение, тем не менее, не очень эффективно, особенно в случае прутков большой длины и ограниченного диаметра. Действительно, прутки этих типов часто поступают на панель подачи перепутанными и перекрещенными друг над другом. В этой ситуации зубья блока селектора не в состоянии принимать прутки или временами теряют их из захвата во время транспортировки.
В US-A-3.712.458 блок селектора оборудован множеством фасонных пластин, расположенных рядом друг с другом и снабженных на продольной кромке множество посадочных канавок для приема прутков.
Фасонные пластины соединены с исполнительным механизмом, предусмотренным для перемещения пластин с помощью эксцентрикового механизма и в соответствии с предварительно определенной последовательностью, пригодной для определения подачи прутков из одной посадочной канавки в следующую.
Однако даже это решение не гарантирует правильной подачи прутков с панели подачи в пункт сбора, так как и в данном случае, некоторые прутки могут неправильно удерживаться в приемных посадочных канавках.
К тому же оба известных решения, описанных выше, сложны для осуществления и часто подвергаются блокировкам прутками.
Другие ограничения и недостатки традиционных решений и технологий будет очевидны специалисту в данной области техники после прочтения оставшейся части настоящего описания со ссылкой на чертежи и последующего описания вариантов осуществления, хотя ясно, что описание уровня техники в связи с настоящим описанием нельзя рассматривать как признание того, что описанное в настоящем документе уже известно из предшествующего уровня техники.
Следовательно, существует потребность в создании устройства и способа для манипулирования прутками, в частности, металлическими прутками, которые могут преодолеть, по меньшей мере, один из недостатков известного уровня техники.
Поэтому одной из целей настоящего изобретения является создание устройства для манипулирования прутками, в частности, металлическими прутками, которое автоматически выбирает один или более прутков из данной пачки или пучка прутков, загруженных в устройство, чтобы получить одну или более групп или комплектов металлических прутков в соответствии с потребностями пользователя металлических прутков.
Другой целью настоящего изобретения является создание устройства для манипулирования прутками, в частности, металлическими прутками, которое эффективно устраняет или, по меньшей мере, ограничивает ручные операции и автоматизирует процесс извлечения, выбора и группирования металлических прутков.
Еще одной целью настоящего изобретения является создание устройства для манипулирования прутками, в частности, металлическими прутками, быстрого и эффективного, чтобы быстро получать группы или комплекты прутков, подлежащих непосредственному использованию или отправке для последующей обработки.
Другой целью настоящего изобретения является создание устройства для манипулирования прутками, в частности, металлическими прутками, которое также в состоянии гарантировать целостность прутков на протяжении всего процесса классификации и группирования.
Цель настоящего изобретения состоит также в создании устройства для манипулирования прутками, которое обеспечивает надлежащее манипулирование прутками даже в том случае, если они наложены и нагромождены друг на друга.
Другая цель состоит в создании быстрого и эффективного способа манипулирования прутками, в частности, для извлечения и выбора металлических прутков.
Заявитель разработал, испытал и осуществил настоящее изобретение, чтобы преодолеть недостатки известного уровня техники и добиться этих и других целей и преимуществ.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Настоящее изобретение изложено с указанием отличительных признаков в независимых пунктах формулы изобретения, тогда как зависимые пункты описывают другие отличительные признаки изобретения или варианты главной идеи изобретения.
В соответствии с вышеуказанными целями и согласно первой особенности изобретения устройство для манипулирования прутками, в частности, металлическими прутками, содержит блок загрузки, снабженный элементами транспортера, образующими опорную плоскость для прутков, и выполненный с возможностью передачи прутков в первом направлении поперек продольного направления прутков и к блоку селектора.
В соответствии с одной особенностью настоящего изобретения блок селектора содержит средство захвата, выполненное с возможностью взятия по меньшей мере одного участка одного или более прутков и поднятия его относительно опорной плоскости. Между блоком загрузки и блоком селектора предусмотрено по меньшей мере одно отделительное устройство, которое содержит множество кронштейнов, выполненных с возможностью перемещения во втором направлении, поперечном первому направлению, для отделения от блока загрузки одного или более прутков, поднятых средством захвата, и для высвобождения их в сторону последующего участка сбора, а также содержит датчики, выполненные с возможностью автоматического определения по меньшей мере количества прутков, извлеченных и высвобожденных средством захвата в сторону пункта сбора.
В соответствии с другой особенностью изобретения блок селектора содержит зажимное устройство, которое может действовать совместно со средством захвата, и выполнено с возможностью удержания одного или более прутков, извлеченных средством захвата.
В некоторых вариантах осуществления изобретения средство захвата содержит, по меньшей мере, подвижную магнитную головку.
Магнитная головка может быть перемещена к пруткам и от них с помощью соответствующего приводного средства; магнитная головка может взаимодействовать с одним или более упорными элементами, выполненными с возможностью обеспечения автоматического высвобождения одного или более прутков, извлеченных магнитной головкой.
Магнитная головка может также содержать одну или более приемных посадочных канавок одного или более извлеченных прутков.
В соответствии с другой особенностью изобретения пункт сбора содержит средство временного расположения прутков для формирования предварительно заданного комплекта прутков.
Устройство также может содержать блок взвешивания, расположенный на выходе пункта сбора и выполненный с возможностью контроля веса комплекта отобранных прутков.
В некоторых вариантах осуществления устройство может содержать блок съема прутков, расположенный на выходе блока взвешивания и выполненный с возможностью съема комплекта прутков с блока взвешивания и передачи ее в накопитель комплектов отобранных прутков.
В некоторых вариантах осуществления устройство может содержать блок управления, выполненный с возможностью управления и обработки, по меньшей мере, данных подсчета и выбора прутков, выполняемых блоком селектора.
Изобретение также относится к способу манипулирования продолговатыми металлическими прутками, включающему в себя загрузку прутков на опорную плоскость, образуемую элементами транспортера блока загрузки, и с помощью элементов транспортера передачи прутков в первом направлении, поперек направления вдоль прутков, и к блоку селектора. В соответствии с одной особенностью изобретения способ включает в себя захват и подъем относительно опорной поверхности, по меньшей мере, одного участка одного или более прутков с помощью средства захвата блока селектора и отделение от блока загрузки одного или более прутков, поднятых средством захвата, путем перемещения во втором направлении, поперечном первому направлению, множества кронштейнов, которые соприкасаются с одним или более этих прутков и высвобождают их в сторону последующего пункта сбора. Способ также включает в себя определение количества прутков, извлеченных и высвобожденных средством захвата в сторону пункта сбора.
Эти и другие особенности, отличительные признаки и преимущества настоящего изобретения будут лучше понятны со ссылкой на последующее описание, чертежи и приложенную формулу изобретения. Чертежи, которые являются неотъемлемой частью настоящего описания, показывают некоторые формы варианта осуществления настоящего изобретения и вместе с описанием предназначены для описания принципов изобретения.
Различные особенности и отличительные признаки, приведенные в настоящем описании, могут применяться по отдельности, где это возможно. Эти отдельные особенности, например, особенности и отличительные признаки, указанные в описании изобретения или в прилагаемых зависимых пунктах формулы изобретения, могут быть объектом разделенных заявок.
Понятно, что любые особенность или отличительный признак, в отношении которых в процессе патентования выясняется, что они уже известны, не должны включаться формулу изобретения и должны быть объектом отказа от пункта формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие отличительные признаки настоящего изобретения станут очевидны из последующего описания некоторых вариантов осуществления, приведенных в качестве не имеющих ограничительного характера примеров со ссылкой на чертежи, прилагаемые к данному документу:
- на Фиг. 1 приведено трехмерное изображение устройства для манипулирования прутками, в частности, металлическими прутками, в соответствии с изобретением;
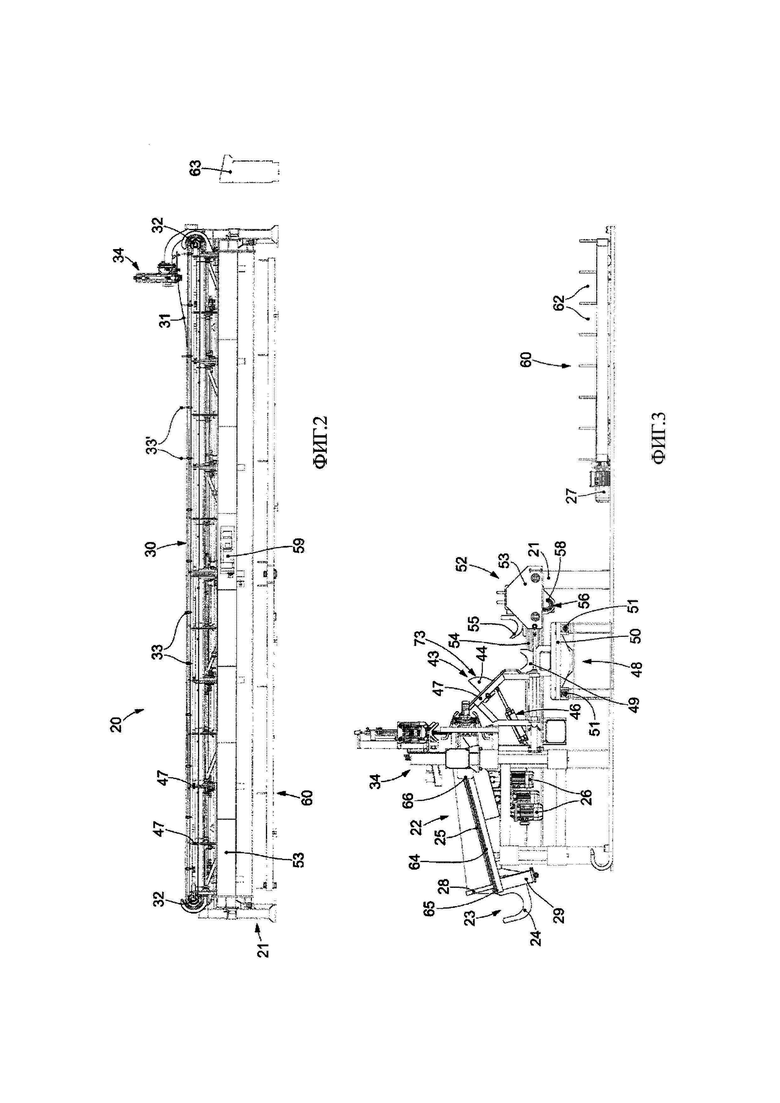
- на Фиг. 2 приведен вид спереди настоящего устройства для манипулирования прутками;
- на Фиг. 3 приведен вид сбоку в вертикальном разрезе настоящего устройства;
- на Фиг. 4 приведено трехмерное изображение блока селектора для одного или более прутков;
- на Фиг. 4a приведен вид в увеличенном масштабе, показывающий магнитную головку блока селектора;
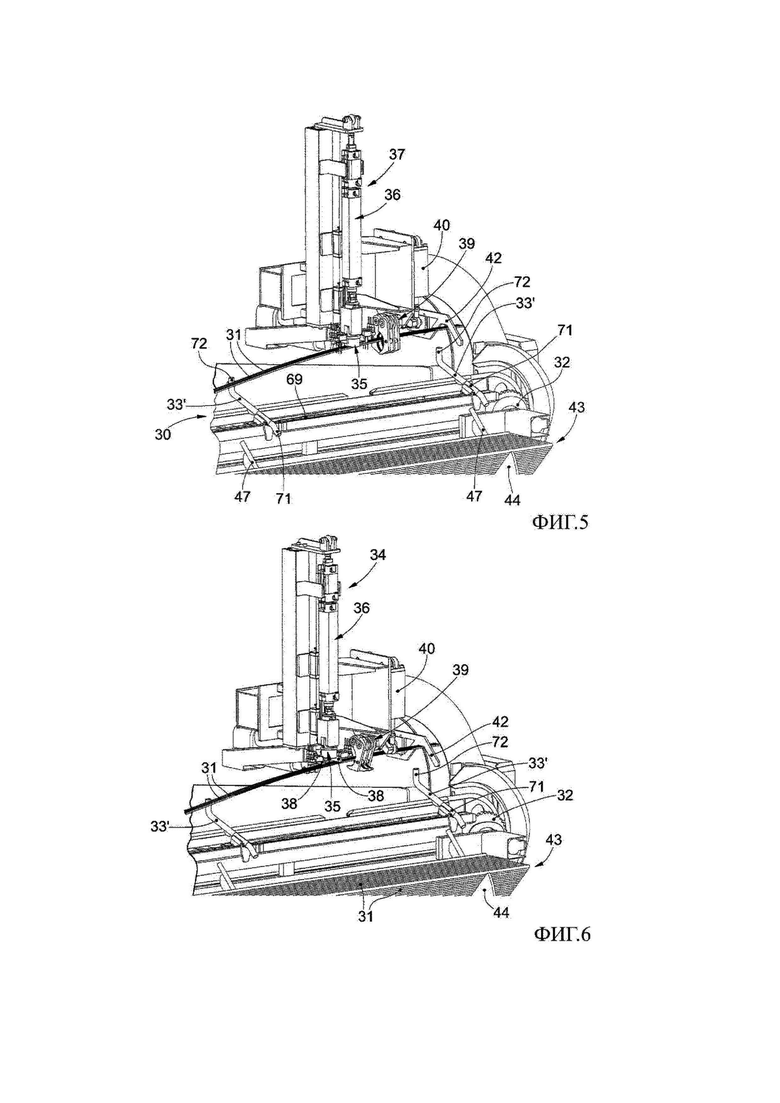
- на Фиг. 5 приведено трехмерное изображение блока селектора на определенном этапе работы;
- на Фиг. 6 приведено трехмерное изображение блока селектора на этапе работы, следующим за этапом работы, показанным на Фиг. 5;
- на Фиг. 7 приведен еще один вид сбоку в вертикальном разрезе настоящего устройства, например, в конце этапа выбора металлических прутков;
- на Фиг. 8 приведен еще один вид сбоку в вертикальном разрезе настоящего устройства, относящийся к расположению комплекта или группы прутков на блоке взвешивания;
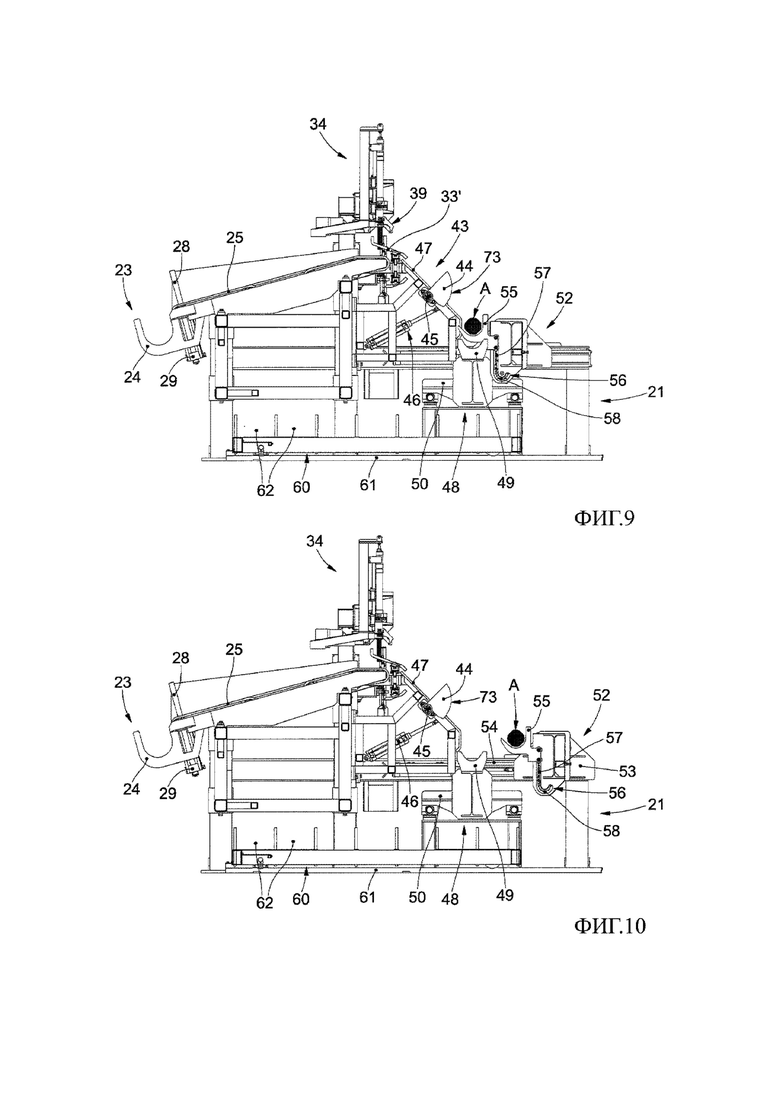
- на Фиг. 9 приведен еще один вид сбоку в вертикальном разрезе настоящего устройства, относящийся к этапу извлечения комплекта прутков из блока взвешивания;
- на Фиг. 10 приведен еще один вид сбоку в вертикальном разрезе настоящего устройства, относящийся к другому этапу извлечения комплекта прутков из блока взвешивания;
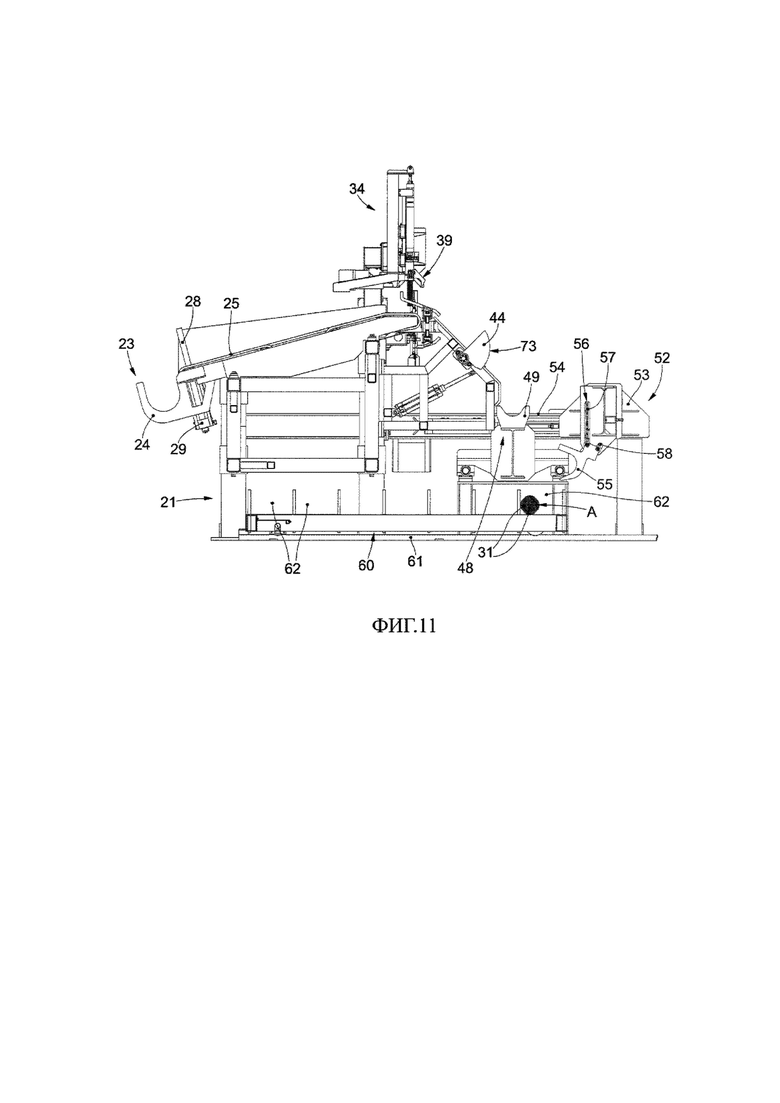
- на Фиг. 11 приведен еще один вид сбоку в вертикальном разрезе настоящего устройства, относящийся к этапу размещения группы прутков, полученной в подвижном хранилище;
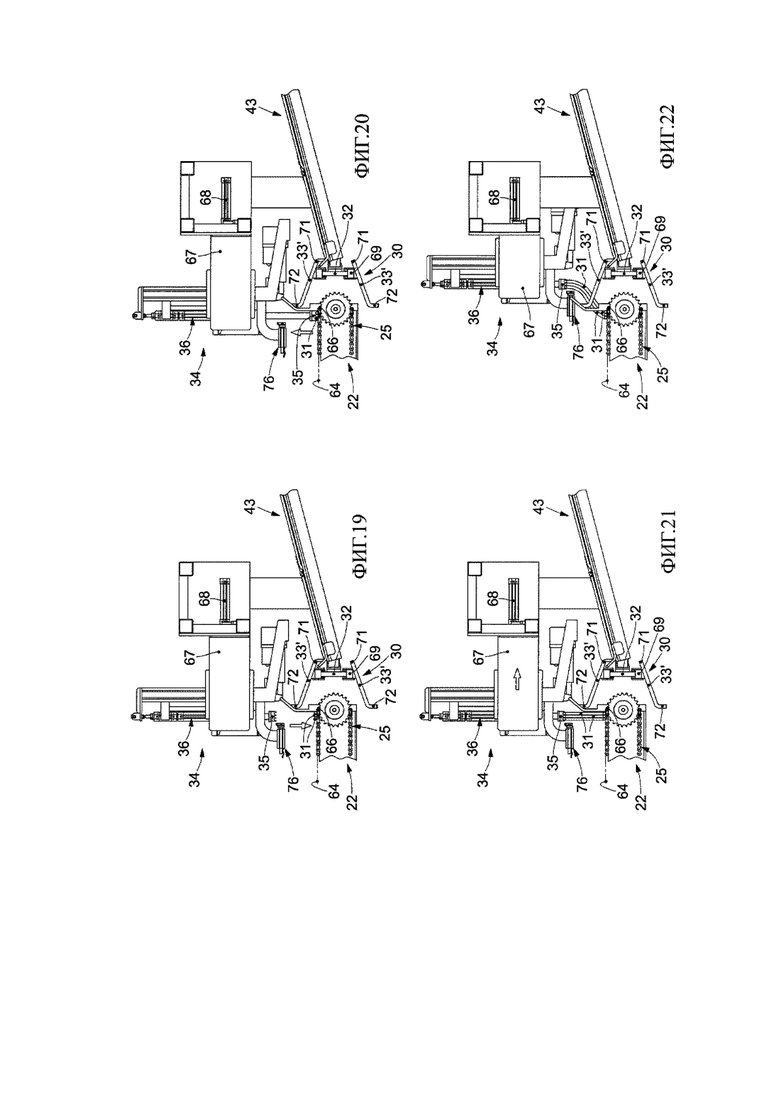
- на Фиг. 12 приведен вид сбоку, частично в разрезе, возможной версии варианта осуществления, изображенной на Фиг. 2;
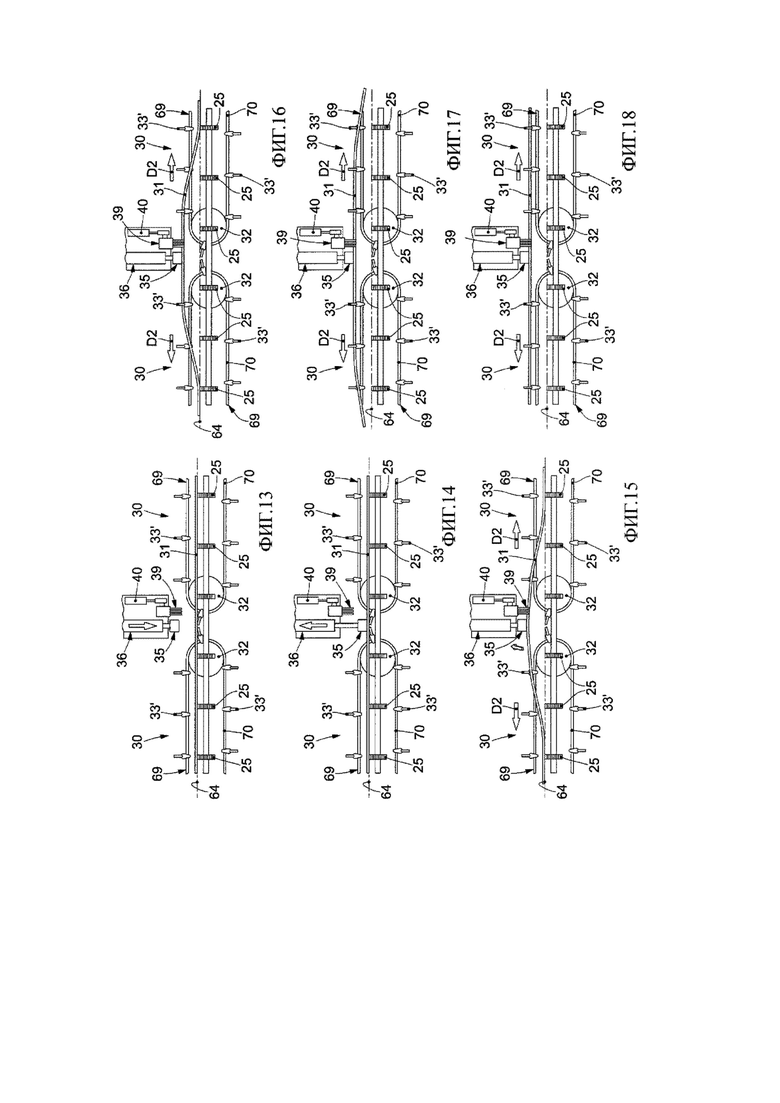
- на Фиг. 13–18 приведены схематичные виды спереди детали устройства, показанной на Фиг. 12, в различных рабочих состояниях;
- на Фиг. 19–22 приведены схематичные виды спереди детали, показанной на Фиг. 12, в различных рабочих состояниях устройства.
Чтобы облегчить понимание, для указания идентичных общих элементов на чертежах, по возможности, использованы одинаковые номера позиций. Понятно, что элементы и отличительные признаки одного варианта осуществления могут быть удобно включены в другие варианты осуществления без дальнейших пояснений.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Теперь подробно остановимся на различных вариантах осуществления настоящего изобретения, один или более примеров которых показаны на прилагаемых чертежах. Каждый пример представлен с целью иллюстрации изобретения и не должен пониматься как ограничивающий изобретение. Например, отличительные признаки, показанные или описанные как часть одного варианта осуществления, могут быть внедрены в других вариантах осуществления или совместно с ними для создания другого варианта осуществления. Понятно, что настоящее изобретение включает в себя все модификации и варианты.
Прежде чем описывать эти варианты осуществления, мы должны также уяснить, что настоящее описание не ограничивается в своем применении деталями конструкции и расположением компонентов, которые указаны в последующем описании с использованием прилагаемых чертежей. Настоящее описание может обеспечить другие варианты осуществления и может быть применено или осуществлено различными другими способами. Мы также должны уяснить, что фразеология и терминология, используемые в настоящем документе, предназначены только для целей описания и не могут рассматриваться как имеющие ограничительный характер.
Как показано на прилагаемых чертежах (см., например. Фиг. 1–3), устройство 20 для манипулирования прутками 31, в частности, металлическими прутками, в соответствии с изобретением содержит блок 22 загрузки, на который сваливают пучок прутков 31, в частности, металлических прутков, например, с помощью мостового крана и т. п.
Блок 22 загрузки может включать в себя зону 23 для разгрузки излишних прутков 31.
Блок 22 загрузки может быть расположен по существу горизонтально (Фиг. 12) или с наклоном к зоне 23 разгрузки (Фиг. 3).
Зона 23 разгрузки может представлять собой, например, ряд рычагов 24 для размещения излишних прутков 31, поступающих из блока 22 загрузки. Рычаги 24 могут быть расположены рядом друг с другом и выровнены в направлении, параллельном направлению вдоль прутков 31.
Блок 22 загрузки содержит ряд элементов 25 транспортера для транспортировки прутков 31, образующих опорную плоскость 64 для прутков 31. Опорная плоскость 64 может быть горизонтальной или наклонной.
Блок 22 загрузки, или опорная поверхность 64, снабжены первой продольной кромкой 65 и второй продольной кромкой 66, находящейся напротив первой продольной кромки 65, причем во время работы они обе расположены параллельно направлению вдоль прутков 31.
Зона 23 разгрузки расположена в соответствии с первой торцевой кромкой 65.
Зона 23 разгрузки расположена, по меньшей мере, частично ниже опорной плоскости 64.
Элементы 25 транспортера выполнены с возможностью переноса прутков 31 в первом направлении D1, которое по существу поперечно направлению вдоль прутков 31 и параллельно опорной плоскости 64.
Элементы 25 транспортера расположены параллельно друг другу в направлении, параллельном первому направлению D1, и снабжены соответствующим приводным средством 26 (Фиг. 3).
Элементы 25 транспортера могут представлять собой, например, множество цепей, расположенных параллельно друг другу и обращающихся вокруг роликов, приводимых во вращение посредством приводного механизма 26.
Элементы 25 транспортера используют для разъединения прутков 31, сваленных на блок 22 разгрузки, например, посредством возвратно-поступательного движения, а также для перемещения разрозненных прутков 31 к блоку 34 селектора, выполненного с возможностью, как будет показано, извлечения и высвобождения одного или более прутков 31.
В соответствии с возможным решением блок 34 селектора устанавливают, по меньшей мере в рабочем состоянии, над опорной плоскостью 64.
Блок 34 селектора может быть расположен в соответствии со второй продольной кромкой 66 опорной плоскости 64.
Элементы 25 транспортера могут быть выполнены с возможностью переноса прутков 31 к зоне 23 разгрузки.
Блок 22 загрузки может быть снабжен, на входе зоны 23 разгрузки, рядом штырей 28, предусмотренных для удержания прутков 31 на блоке 22 загрузки и предотвращения сползания сваливаемых на блок 22 загрузки прутков 31 от сползания прямо в зону 23 разгрузки.
Однако блок 22 загрузки может содержать, в альтернативном варианте осуществления, который показан на Фиг. 12, элементы 25 транспортера, расположенные на по существу горизонтальной плоскости.
Штыри 28 могут быть расположены в соответствии с ориентацией, наклонной по отношению к опорной плоскости 64.
Каждый из штырей 28 может иметь, например, исполнительный механизм 29, выполненный с возможностью опускания и подъема штыря 28 относительно опорной плоскости 64. В частности, когда штырь 28 в поднятом положении, или выступает относительно опорной плоскости 64, прутки 31 гарантированно удерживаются на блоке 22 разгрузки, тогда как если штырь 28 в опущенном положении, или втянут по отношению к опорной плоскости 64, прутки 31 могут перемещаться к зоне 23 разгрузки с целью разгрузки прутков 31.
В соответствии с одной особенностью настоящего изобретения блок 34 селектора содержит средство 35 захвата, выполненное с возможностью взятия по меньшей мере одного участка одного или более прутков 31 и по меньшей мере поднятия ее относительно опорной плоскости 64.
В соответствии с вариантом осуществления, показанным на Фиг. 1 и 4, блок 34 селектора расположен на одном конце устройства 20 или на одном конце второй продольной кромки 66 опорной плоскости 64. В соответствии с данным вариантом осуществления блок 34 селектора выполнен с возможностью взятия и подъема концевого участка прутка или прутков 31.
В соответствии с другой версией варианта осуществления (Фиг. 12–22) блок 34 селектора расположен в промежуточной зоне вдоль длины опорной плоскости 64 или вдоль длины второй продольной кромки 66. В соответствии с данным вариантом осуществления блок 34 селектора выполнен с возможностью взятия и подъема промежуточного участка прутка или прутков 31.
Средство 35 захвата может быть связано с приводным средством 36, выполненным с возможностью перемещения средства 35 захвата между положением извлечения, в котором оно расположено по существу на одной линии с опорной поверхностью 64, чтобы обеспечивать возможность извлечения прутков, и положением подъема, в котором средство 35 захвата удерживается над опорной плоскостью 64 и удерживает извлеченный участок прутка 31 поднятым.
Средство 35 захвата может содержать, например, по меньшей мере одну магнитную головку, которая может перемещаться вверх или вниз приводным механизмом 36. Приводное средство 36 может представлять собой, например, линейный исполнительный механизм, шток которого может быть связан со средством 35 захвата.
Блок 34 селектора может также обеспечивать манипуляционное устройство магнитного типа, такое как описанное в международной заявке PCT/EP2017/064239.
Средство 35 захвата блока 34 селектора может быть также механического или электромеханического типа.
Далее в этом документе описание будет относится, в качестве не имеющего ограничительного характера примера, к случаю, в котором средство захвата представляет собой показанную магнитную головку 35.
Магнитная головка 35 снабжена множеством приемных посадочных канавок 37, каждая из которых выполнена с возможностью приема и удержания соответствующего прутка 31 (Фиг. 4a).
Посадочные канавки 37 могут иметь размер, пригодный для обеспечения возможности размещения одного прутка 31, то есть, они могут иметь ширину, по существу равную диаметру прутка 31.
Как мы увидим, в зависимости от настроек, предоставляемых в устройство 20, например, в блок 63 управления устройства 20, и в зависимости от количества прутков 31, которые нужно извлечь, можно использовать любое количество посадочных канавок 37, от одной до всех посадочных канавок 37.
В соответствии с возможным решением магнитная головка 35 на одной или двух своих противоположных сторонах содержит по меньшей мере один упорный элемент 38, который может быть фиксированным или подвижным относительно магнитной головки 35, так чтобы обеспечивать возможность контакта с одним или более прутками 31, помещенными в средство захвата, например в посадочные канавки 37.
Упорная поверхность упорного элемента 38 может быть расположена на плоскости, соответствующей плоскости расположения посадочных канавок 37, когда средство захвата находится в своем положении подъема.
В частности, за счет соответствующего расположения упорного элемента 38 можно брать только некоторые из прутков 31 во взаимодействии с упорным элементом 38, тогда как остальные остаются свободными. При подъеме магнитной головки 35 прутки 31 во взаимодействии с упорным элементом 38 за счет механической помехи будут высвобождаться магнитной головкой 35, тогда как остальные прутки 31 будут удерживаться захваченными и впоследствии высвободятся в сторону выхода пункта, как описано ниже.
В соответствии с возможным вариантом осуществления (Фиг. 12 и 19–22) средство 35 захвата может содержать элемент 76 селектора, выполненный с возможностью удаления прутков 31, не вставленных в посадочные канавки 37, из средства захвата.
Только в качестве примера, если магнитная головка 35 удерживает с помощью магнитного действия прутки 31 вне посадочных канавок 37, элемент 76 селектора удаляет их.
Элемент 76 селектора может представлять собой скобу, выполненную с возможностью линейного перемещения в плоскости, соответствующей плоскости расположения отверстий посадочных канавок 37. Столкновение подвижной скобы с прутками 31, не содержащимися в посадочных канавках 37, препятствует извлечению прутков магнитной головкой 35, предотвращая нежелательный перенос прутков.
Блок 34 селектора также содержит зажимное устройство 39, открываемое и закрываемое с помощью соответствующего приводного средства 40.
Зажимному устройству 39 отводится функция удержания и прочного зажатия прутков 31, первоначально извлекаемых магнитной головкой 35. Для подсчета количества прутков 31, извлекаемых магнитной головкой 35 или средством захвата блока 34 селектора, вблизи магнитной головки 35 расположены датчики 41, например, лазерные датчики, фотоэлементы и т. п.
Чтобы сделать возможным подсчет каждого отдельного прутка 31, можно обеспечить, чтобы каждый из датчиков 41 был связан с соответствующей посадочной канавкой 37 для размещения прутка 31.
Если, как в данном случае (опять см. Фиг. 4a), датчики 41 размещены на обеих сторонах магнитной головки 35, то датчики 41 расположены таким образом, что, например, если первая посадочная канавка 37 примыкает ко второй посадочной канавке 37, то датчик 41 первой посадочной канавки 37 находится на одной стороне магнитной головки 35, а датчик 41 второй посадочной канавке 37 находится на другой стороне магнитной головки 35.
Блок 34 селектора может также содержать контрастный элемент 42, который взаимодействует с целью обеспечения правильного расположения прутка или прутков 31, извлеченных блоком 34 селектора.
В соответствии с возможным вариантом осуществления (Фиг. 12 и 19–22) средство 35 захвата может быть установлено на ползунке 67, выполненном с возможностью перемещения в направлении, параллельном первому направлению D1, для приведения средства 35 захвата из положения над плоскостью 64 загрузки в положение перемещения над отделительным устройством 30, как описано ниже.
Блок 22 загрузки расположен последовательно с отделительным устройством 30 и выровнен с ним в первом направлении D1.
В частности, можно обеспечить, чтобы отделительное устройство 30 располагалось у второй продольной кромки опорной плоскости 64.
К ползунку 67 может быть присоединен исполнительный механизм 68, выполненный с возможностью приведения ползунка 67 в два положения.
С помощью отделительного устройства 30 можно отделять пруток или множество прутков 31 из числа забранных элементами 25 транспортера по существу в непосредственной близости от блока 34 селектора.
В соответствии с одной особенностью изобретения отделительное устройство 30 содержит множество кронштейнов 33’, выполненных с возможностью перемещения во втором направлении D2, поперечном первому направлению D1, для отделения от блока 22 загрузки одного или более прутков 31, поднятых средством 35 захвата, и высвобождения их в сторону последующего пункта 43 сбора.
В соответствии с одним вариантом осуществления изобретения во втором направлении D2 отделительное устройство 30 расположено между блоком 22 загрузки и блоком 34 селектора.
В соответствии с возможными вариантами осуществления кронштейны 33’ могут быть расположены, по меньшей мере в их рабочем состоянии для выделения прутков 31, над опорной плоскостью 64.
По меньшей мере некоторые из кронштейнов 33’ в их состоянии выделения, расположены на одной линии и разнесены относительно друг друга во втором направлении D2.
Отделительное устройство 30 может содержать элементы 69 передачи движения, предусмотренные для перемещения кронштейнов 33’ во втором направлении D2.
Элементы 69 передачи движения могут находиться по существу на одной линии во втором направлении D2.
Элементы 69 передачи движения могут представлять собой цепь 70, или ремень, или трос, обернутые кольцом вокруг по меньшей мере одной пары роликов 32 обратной подачи. По меньшей мере один из роликов 32 связан со средством привода для элементов передачи движения.
Цепь 70 образует первый сегмент возврата, который помещает кронштейны 33’ над опорной плоскостью 64 в положение, пригодное для выделения или отделения прутков 31, и второй сегмент возврата, который помещает кронштейны 33’ под опорную плоскость 64.
В соответствие с версией варианта осуществления элементы передачи движения могут представлять собой линейное исполнительное устройство, выполненное с возможностью линейного перемещения и поддерживающее кронштейны 33’.
В соответствии с первым вариантом осуществления (Фиг. 1–11), устройство 20 содержит одно отделительное устройство 30, которое простирается по существу на всю длину опорной панели 64 или на всю длину второй продольной кромки 66.
В данном случае кронштейны 33’ выполнены с возможностью перемещения во втором направлении D2 и в сторону от средства 35 захвата, которое расположено в соответствии с одним концом второй продольной кромки 66.
В некоторых вариантах осуществления можно обеспечить, чтобы кронштейны 33’ были выполнены с возможностью перемещения от первого конца второй продольной кромки 66 к противоположному концу.
В соответствии с версией варианта осуществления (Фиг. 12–22) устройство 20 содержит два отделительных устройства 30, расположенных по отношению к первому направлению D1 на одной стороне и другой стороне средства 35 захвата и параллельно второй продольной кромке 66 опорной плоскости 64.
В соответствии с данным вариантом осуществления средство 35 захвата расположено в промежуточном положении вдоль длины второй продольной кромки 66 опорной плоскости 64.
Кроме того, кронштейны 33’ двух отделительных устройств 30 могут быть выполнены с возможностью перемещения во втором направлении D2, причем оба в сторону от средства 35 захвата. В частности, предусматривается, что кронштейны 33’ первого отделительного устройства 30 выполнены с возможностью перемещения в противоположную сторону относительно кронштейнов 33’ второго отделительного устройства 30, как показано на Фиг. 15–18.
В соответствии с возможными решениями (Фиг. 5–7 и Фиг. 19–22) кронштейны 33’ могут иметь крюкообразную форму, причем первый концевой участок 71 прикреплен к элементу 69 передачи движения, а второй концевой участок 72 оставлен свободным и во время использования вступает в контакт с прутками 31, определяя их выделение.
В соответствии с вариантами осуществления, показанными на Фиг. 1–11, и в случае, где средство 35 захвата зафиксировано и находится над опорной плоскостью 64, по меньшей мере второй концевой участок 72 кронштейнов 33’ перекрывает опорную плоскость 64, чтобы перехватить участки прутка 31, которые подняты средством 35 захвата, и определить их последующее выделение.
В соответствии с данным решением отделительное устройство 30 может представлять собой отклоняющие кронштейны 33 (Фиг. 4), установленные на первом продольном сегменте отделительного устройства 30 и выполненные с возможностью отклонения прутков 31 к пункту 43 сбора.
В соответствии с данным решением можно обеспечить, чтобы кронштейны 33’ были установлены на втором продольном сегменте отделительного устройства 30, который следует за первым продольным сегментом.
Кронштейны 33 и 33’ могут быть эффективно наклонены к зоне, где прутки 31 выгружают из блока 34 селектора.
Хотя на прилагаемых чертежах устройство 20 содержит только один пункт 43 сбора, не исключено, что в других возможных версиях варианта осуществления устройство 10 содержит два или более пунктов 43 сбора, расположенных последовательно один за другим, и каждый из них выполнен с возможностью приема прутков 31, подаваемых блоком 34 селектора.
Пункты 43 сбора (Фиг. 1–11) могут действовать в качестве временных зон сбора для пучков прутков 31, например, чтобы обеспечивать возможность их дальнейшей подачи на последующие устройства с учетом временных требований, предъявляемых устройствами, расположенным далее в потоке обработки.
Пункт сбора 43 может содержать средство 73 временного размещения для прутков 31, обеспечиваемое, например, с помощью подвижных скоб 44.
Подвижные скобы 44 могут быть связаны с валом 45, выполненным с возможностью вращения с помощью одного или более приводных средств 46.
Подвижные скобы 44 расположены на определенной высоте ряда элементов 47 скольжения, которые двигают прутки 31.
Элементы 47 скольжения могут представлять собой, например, стержни, наклоненные соответствующим образом к блоку 48 взвешивания прутков 31.
Наклон элементов 47 скольжения по существу противоположен наклону элементов 25 транспортера блока 22 загрузки.
В частности, приводное средство 46 выполнено с возможностью приведения подвижных скоб 44 в выдвинутое состояние по отношению к плоскости, определяемой элементами 47 скольжения, чтобы временно удерживать прутки 31, и задвинутое состояние по отношению к указанной плоскости, чтобы обеспечивать возможность разгрузки прутков 31.
В соответствии с возможной версией варианта осуществления, показанной на Фиг. 12–22, пункт 43 сбора может также содержать передаточное устройство 74, расположенное между отделительными устройствами 30 и средством 73 временного размещения и выполненное с возможностью передачи прутков 31, принимаемых из отделительных устройств 30, к средству 73 временного размещения.
Передаточное устройство 74 может содержать множество элементов 75 передачи, например, цепей, обернутых в виде замкнутой петли, которые выполнены с возможностью передачи прутков 31 в направлении, параллельном первому направлению D1.
В соответствии с возможным решением элементы 75 передачи образуют плоскость для перемещения прутков 31, которая наклонена вверх и к средству 73 временного размещения.
Передаточное устройство 74 может определять, например, временное накопление прутков 31, чтобы обеспечивать возможность, например, совершения ручных операций, выполняемых операторами на выход пункта 43 сбора, например, после блока 48 взвешивания.
Блок 48 взвешивания может содержать ряд рычагов 49 для размещения прутков 31. Рычаги 49 могут быть расположены на опоре 50, связанной с тензодатчиками 51, выполненными с возможностью взвешивания прутков 31.
На выходе блока 48 взвешивания настоящее устройство 20 содержит блок 52 съема, выполненный с возможностью съема прутков 31 с блока 48 взвешивания.
Блок 52 съема снабжен ползунком 53, который может перемещаться в двух направлениях вдоль соответствующих неподвижных направляющих 54. Для выполнения перемещения в одном или другом направлении ползунок 53 связан с соответствующим приводным средством.
В некоторых вариантах осуществления ползунок 53 содержит ряд кронштейнов 55 для удаления прутков 31 из блока 48 взвешивания. Кронштейны 55 для удаления прутков 31 находятся в смещенном положении относительно рычагов 49 чтобы они могли удалять прутки 31 из рычагов 49, не сталкиваясь с ними.
Кронштейны 55 для удаления могут быть связаны с направляющими 56 скольжения (см., например, Фиг. 7), которые имеют первый по существу линейный сегмент 57 для подъема или опускания кронштейнов 55 и второй криволинейный сегмент 58 для опрокидывания кронштейнов 55.
Скольжение кронштейнов 55 вдоль направляющих 56 осуществляется с помощью соответствующего приводного средства 59, предпочтительно размещенного в ползунке 53.
На выходе блока 52 съема настоящее устройство 20 содержит накопитель 60 для сбора снятых прутков 31.
Накопитель 60 выполнен с возможностью перемещения и расположен на соответствующих направляющих 61 скольжения, покоящихся на земле.
Направляющие 61 скольжения выполнены с возможностью обеспечения поступательного движения накопителя 60 под опорной конструкцией 21 настоящего устройства 20, как ясно видно на Фиг. 1.
Расположение накопителя 60 под конструкцией 21 позволяет оптимизировать пространства и доставлять комплект прутков 31 в любую зону, где бы ни находился сам накопитель 60.
Накопитель 60 перемещается вдоль направляющих 61 скольжения с помощью соответствующего приводного средства 27.
Накопитель 60 разбит на множество отсеков 62 или секторов, в которые помещают группы прутков 31, взятые из блока 52 съема.
В частности, можно обеспечить, чтобы каждый сектор 62 был связан с определенным заказчиком, которому эти прутки 31 предназначены.
В соответствии с некоторыми вариантами осуществления блок 63 управления может быть соединен по меньшей мере с приводным средством 27, чтобы перемещать накопитель 60 управляемым образом и определять точное позиционирование данного сектора 62, например, в соответствии с зоной разгрузки блока 52 съема.
Функционированием устройства 20, пример которого показан ниже, руководит блок 63 управления, к которому может получать доступ оператор, чтобы управлять и различными операциями и контролировать их (см., например, Фиг. 4–11).
Пачку или пучок прутков 31, в частности, металлических прутков, помещают с помощью мостового крана и т. п. на элементы 25 транспортера блока 22 загрузки.
Таким образом, элементы 25 транспортера принимают некоторое количество прутков 31, подлежащих передаче в разрозненном виде к блоку 34 селектора.
Для предотвращения на этом этапе соскальзывания прутков 31 в зону разгрузки 23 или падения их с опорной плоскости 25, с помощью исполнительных механизмов 29 соответствующим образом поднимают штыри 28, расположенные возле нижнего конца блока 22 загрузки.
Магнитную головку или средство 35 захвата (Фиг. 14, 20) опускают с помощью соответствующего приводного средства 36, чтобы обеспечить возможность съема множества прутков 31 с блока 22 загрузки.
Каждый пруток 31 будет помещен в соответствующую посадочную канавку 37 магнитной головки 35 и удерживаться в ней. Для каждой посадочной головки 37 предусмотрен, как было сказано, датчик 41, который обнаруживает наличие прутка 31: с помощью датчиков 41 в конечном счете можно подсчитать извлеченные прутки 31 и сообщить их количество в блок 63 управления.
На этапе извлечения прутков 31 с помощью магнитной головки 35 и помещения их в посадочные канавки 37 зажимное устройство 39 находится в открытом положении, как, например, на Фиг. 4.
После того, как магнитная головка 35 извлекла прутки 31, их поднимают с помощью приводных средств 36, чтобы привести прутки 31 по существу на высоту зажимного устройства 39 (см. Фиг. 5, 15, 21). На этой стадии зажимное устройство 39 частично закрывают с помощью соответствующего приводного средства 40 (Фиг. 5).
Зажимное устройство 39 полностью закрывают и магнитную головку 35 поднимают дальше (см. Фиг. 6), чтобы извлеченные прутки 31 оказались напротив упорных элементов 38. Таким образом, прутки 31 отделяют от магнитной головки 35 и зажимают зажимным устройством 39.
Как было сказано, можно обеспечить, чтобы упорные элементы 38 можно было располагать относительно прутков 31, присутствующих в посадочных канавках 37 магнитной головки 35. Таким образом, при поднятии магнитной головки 35 некоторые из прутков 31, присутствующих в посадочных канавках 37, упираются в упорные элементы 38 и высвобождаются непосредственно в блок 22 загрузки для последующего извлечения.
Другие прутки 31, не вступающие во взаимодействие с упорными элементами 38, остаются захваченными в магнитной головке 35 и могут впоследствии удерживаться зажимным устройством 39.
Таким образом, зажимное устройство 39 удерживает поднятыми концевые участки (Фиг. 6) или промежуточные участки (Фиг. 15 и 21) прутков 31, извлеченных из магнитной головки 35, тогда как остальная часть прутка 31 по-прежнему находится в блоке 22 загрузки.
В этом состоянии приводят в действие отделительное устройство 30, выполненное с возможностью отделения прутков 31 на блоке 22 загрузки и передачи их к пункту 43 сбора.
В соответствии с вариантом осуществления, показанным на Фиг. 2, 4, 4a, 5 и 6, за счет приведения в действие элементов 69 передачи движения можно крюкообразные кронштейны 33’ привести в положение, заключенное между элементом 25 транспортера, то есть, опорной плоскостью 64, и поднятыми концами прутков 31.
Кронштейны 33’ перемещаются вдоль продольного направления элементов передачи движения, вступая в контакт с остальной частью прутков 31, которая по-прежнему находится в блоке 22 загрузки. Таким образом, кронштейны 33’ оказывают действие по отделению прутков 31 от блока 22 загрузки, чтобы привести их к пункту 43 сбора.
В показанном примере предполагается, что с помощью блока 34 селектора отделяют и впоследствии извлекают множество прутков 31, но, естественно, можно обеспечить отделение и извлечение одного прутка 31.
Действие по отделению выполняют с прутками 31, зажатыми зажимным устройством 39, чтобы действие по отделению прутков 31 не привело также к перемещению в направлении вдоль длины прутков 31.
При открытии зажимного устройства 39 (см. Фиг. 7) извлеченные прутки 31 соскальзывают вдоль кронштейнов 33’ и вдоль элементов 47 скольжения до тех пор, пока они не достигнут подвижных скоб 44 для временного размещения прутков 31.
В соответствии с вариантом осуществления, показанном на Фиг. 16–18 и 22, средство 35 захвата извлекает и поднимает с плоскости 64 загрузки промежуточные участки прутков 31 (Фиг. 20, 21). Средство 35 захвата (Фиг. 21 и 22) перемещается с помощью ползунка 67 в направлении, параллельном первому направлению D1.
Таким образом, средство 35 захвата располагается за пределами габаритов плоскости 64 загрузки и над двумя отделительными устройствами 30 (Фиг. 22).
В этом состоянии приводят в действие оба отделительных устройства 30, чтобы начать выделение прутков 31, поднятых с помощью средства 35 подъема.
В частности, каждое отделительное устройство 30 отделяет и передает соответствующую половину длины прутков 31, чтобы передать их к пункту сбора (Фиг. 16–18).
Когда прутки 31 полностью отделены от блока 22 загрузки, они могут быть выгружены на передаточное устройство 74 и впоследствии переданы к средству 73 временного размещения.
В соответствии с вариантами осуществления, показанными на чертежах, прутки 31 могут выгружаться на подвижные скобы 44 пункта 43 сбора до тех пор, пока не будет получен комплект A из предварительно определенного количества прутков 31, например, на основе запроса конечного пользователя.
Поэтому комплект A представляет подгруппу исходного пучка или пачки прутков 31, первоначально сваленных в блок 22 загрузки.
По сути, блок 34 селектора может срабатывать несколько раз до тех пор, пока не будет достигнуто требуемое количество прутков 31 для формирования комплекта A. Затем операцию по извлечению прутков 31 из отделительного устройства 30 или непосредственно из блока 22 загрузки и последующему высвобождению с помощью зажимного устройства 39 продолжают до тех пор, пока не будет достигнуто требуемое количество прутков 31 для комплекта A. Естественно, может оказаться достаточно и одной операции извлечения блоком 34 селектора, или, наоборот, может потребоваться несколько операций извлечения.
Когда с помощью датчиков 41 установлено, что комплект A содержит требуемое количество прутков 31, блок 63 управления подает приводному средству 46 подвижных скоб 44 команду повернуть их и позволить комплекту A прутков 31 пройти из пункта 43 сбора к блоку 48 измерения за счет дальнейшего сползания вдоль элементов 47 скольжения. На практике в приведенном выше примере подвижные скобы 44 будут повернуты вниз примерно на 90°.
На этом этапе, и как показано на Фиг. 1–11, также могут быть втянуты штыри 28 с помощью соответствующих исполнительных механизмов 29, и поэтому прутки 31, которые остались после операции выбора, могут сползти вдоль блока 22 загрузки до зоны 23 разгрузки.
Прутки 31, которые будут собраны на рычагах 24 зоны 23 разгрузки, могут быть затем удалены с помощью мостового крана и т. п. для последующего использования в блоке 22 загрузки или иным образом.
Таким образом, комплект A оказывается на рычагах 49 блока 48 взвешивания (Фиг. 8) для проверки путем взвешивания при помощи, например, опоры 50 рычагов 49, которая связана с тензодатчиками 51.
Ползунок 53 блока 52 съема перемещается вдоль направляющих 54 таким образом, чтобы кронштейны 55 расположились в соответствии с рычагами 49.
После того, как операция взвешивания комплекта A прутков 31 завершена, кронштейны 55 блока 52 съема поднимаются приводным средством 59 вдоль первого сегмента 57 направляющих 56, чтобы они подняли комплект A прутков 31 из рычагов 49, например, как на Фиг. 9.
В это время ползунок 53 втягивается, как на Фиг. 10, чтобы переместить комплект A прутков 31 из зоны блока 48 взвешивания.
В этом состоянии прутки 31 на ползунке 53 могут быть связаны друг с другом, например, с помощью железных лент или проволок, чтобы получить компактный пучок. Операция связывания комплекта A прутков 31 может быть выполнена вручную или в автоматизированном режиме. В последнем случае устройство 20 для манипулирования прутками 31 снабжено автоматизированным блоком связывания, например, установленным на ползунке 53, и выполнено с возможностью связывания прутков 31 вместе без вмешательства операторов.
На этом этапе комплект прутков 31 помещают в один из секторов 62 накопителя 60 (Фиг. 11), который был перемещен под конструкцией 21 устройства 20 при помощи соответствующего приводного средства 27.
Помещение комплекта A прутков 31 в один из секторов 62, или отсеков, накопителя 60 осуществляют поворотом кронштейнов 55, которые скользят вдоль второго криволинейного сегмента 58 направляющих 56, так что кронштейны 55 автоматически сваливают комплект A прутков 31 в сектор 62.
Перемещая поступательно накопитель 60 вдоль направляющих 61, можно привести второй пустой сектор 62 в соответствие с кронштейнами 55 блока съема 52 для помещения нового комплекта A прутков 31 в этот другой пустой сектор 62.
Для ускорения операций наполнения накопителя 60 можно обеспечить, чтобы при помещение первого комплекта A прутков 31 на рычаги 49 блока 48 взвешивания новый комплект прутков 31 уже помещался на подвижные скобы 44 пункта 43 сбора.
Когда секторы 62 накопителя 60 заняты требуемыми наборами прутков, которые могут быть также одним комплектом A прутков 31, накопитель 60 можно извлекать из конструкции 21 устройства 20, перемещая его вдоль направляющих 61.
Ясно, что в устройство 20 и способ манипулирования прутками 31, в частности, металлическими прутками, можно внести модификации и/или добавить детали, как описано выше, без отклонения от области и объема настоящего изобретения.
Например, можно обеспечить, чтобы в возможной версии варианта осуществления пункт 43 сбора был связан с блоком 48 взвешивания и/или встроен в него, чтобы блок 34 селектора после подсчета доставлял прутки 31 непосредственно в блок 48 взвешивания.
В соответствии с другой версией варианта осуществления комплект A прутков 31, подсчитанных с помощью датчиков 41, может передаваться непосредственно в накопитель 60, для исключения, например, этапов взвешивания. Следовательно, в этом случае блок 52 съема может быть выполнен с возможностью извлечения комплекта A прутков 31 непосредственно из пункта 43 сбора и доставки его в накопитель 60.
Также ясно, что, хотя настоящее изобретение описано со ссылкой на некоторые конкретные примеры, специалист в данной области техники несомненно сможет добиться многих других эквивалентных форм устройства 20 и способа для манипулирования прутками 31, в частности, металлическими прутками, имеющих отличительные признаки, которые изложены в формуле изобретения, и, следовательно, все входящие в определенную ею область охраны.
В следующей формуле изобретения ссылки в скобках предназначены исключительно для облегчения чтения: они не должны рассматриваться в качестве ограничивающих факторов в отношении области охраны, заявленной в конкретных пунктах формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2534916C2 |
| ПЫЛЕСОС ЦИЛИНДРИЧЕСКОГО ТИПА | 2010 |
|
RU2557743C2 |
| Устройство для уплотнения и переноса комплектов фильтрующих пакетов, содержащих вещества для настаивания | 2013 |
|
RU2622712C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2531263C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ПРУТКОВ | 2018 |
|
RU2773074C2 |
| УСТРОЙСТВО ДЛЯ УДАЛЕНИЯ И ОБРАБОТКИ ФОРМОВАННЫХ ИЗДЕЛИЙ ИЗ УСТАНОВКИ ДЛЯ ФОРМОВАНИЯ ЛИСТОВЫХ ТЕРМОПЛАСТОВ | 1997 |
|
RU2174069C2 |
| СПОСОБ ПОДАЧИ ПРУТКОВ К СТАНКУ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО | 2007 |
|
RU2440207C2 |
| МАШИНА ДЛЯ НАПОЛНЕНИЯ ЕМКОСТЕЙ | 2002 |
|
RU2288887C2 |
| Устройство и способ обработки прутков | 2018 |
|
RU2764934C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО МАНИПУЛИРОВАНИЯ ЛЕГКОПОВРЕЖДАЕМЫМИ ЗАГОТОВКАМИ | 1997 |
|
RU2194606C2 |




Группа изобретений относится к устройствам для манипулирования металлическими прутками и может быть использована в строительной отрасли. Устройство содержит блок (22) загрузки, снабженный элементами (25) транспортера для передачи ряда прутков (31) к блоку (34) селектора, который содержит средство (35) захвата, выполненное с возможностью извлечения одного или более прутков (31) с элементов (25) транспортера блока (22) загрузки и высвобождения их в сторону последующего пункта (43) сбора. Устройство содержит датчики (41), выполненные с возможностью автоматического определения по меньшей мере количества прутков (31), извлеченных и высвобожденных средством (35) захвата в сторону пункта (43) сбора. Раскрыт способ манипулирования прутками с использованием заявленного устройства. Обеспечивается быстрое и эффективное извлечение и выбор металлических прутков. 2 н. и 15 з.п. ф-лы, 22 ил.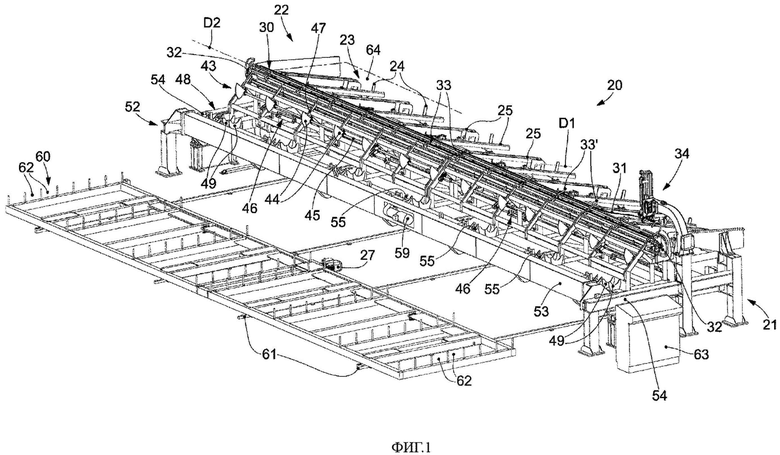
1. Устройство для манипулирования продолговатыми металлическими прутками (31), содержащее блок загрузки (22) с элементами транспортера (25), образующими опорную плоскость (64) для указанных прутков (31), блок селектора (34) и по меньшей мере один пункт сбора (43), выполненный с возможностью приема прутков (31), подаваемых блоком (34) селектора, при этом блок загрузки (22) выполнен с возможностью передачи прутков (31) в первом направлении (D1), поперечном направлению вдоль длины прутков (31) к блоку (34) селектора, отличающееся тем, что блок селектора (34) снабжен средствами захвата (35), выполненными с возможностью захвата по меньшей мере участка одного или более прутков (31) и поднятия его относительно опорной плоскости (64), при этом упомянутые средства захвата (35) закреплены и размещены над упомянутой опорной плоскостью (64); между блоком (22) загрузки и указанным блоком селектора (34) предусмотрено по меньшей мере одно отделительное устройство (30), содержащее кронштейны (33’) и элементы передачи движения (69), предназначенные для перемещения указанных кронштейнов (33′) во втором направлении (D2), поперечном первому направлению (D1), для отделения от блока загрузки (22) одного или более прутков (31), поднятых средством захвата (35), и для высвобождения их в сторону соответствующего пункта сбора (43), при этом кронштейны (33') выполнены крюкообразной формы и установлены из условия их расположения при извлечении прутков (31) выше указанной опорной плоскости (64) и отклонения прутков (31) к пункту сбора (43), причем первый концевой участок (71) кронштейнов (33′) прикреплен к элементу передачи движения (69), а второй свободный концевой участок (72) расположен с возможностью его контакта с прутками (31) при их извлечении и перекрытия по меньшей мере упомянутым вторым концевым участком (72) указанной опорной плоскости (64), при этом устройство снабжено датчиками (41), выполненными с возможностью автоматического определения по меньшей мере количества прутков (31), извлеченных и высвобожденных средством захвата (35) в сторону пункта сбора (43).
2. Устройство по п. 1, отличающееся тем, что опорная плоскость (64) содержит первую продольную кромку (65) и вторую продольную кромку (66), находящуюся напротив первой продольной кромки (65), при этом блок селектора (34) расположен в соответствии со второй продольной кромкой (66) опорной плоскости (64), а указанное отделительное устройство (30) расположено с возможностью отделения по меньшей мере одного прутка в непосредственной близости от блока (34) селектора.
3. Устройство по п. 1 или 2, отличающееся тем, что оно содержит одно отделительное устройство (30), которое расположено на всю длину опорной плоскости (64).
4. Устройство по п. 2 или 3, отличающееся тем, что блок (34) селектора расположен на одном конце второй продольной кромки (66) опорной плоскости (64) с обеспечением захвата и подъема концевых участков одного или более прутков (31).
5. Устройство по п. 2, отличающееся тем, что содержит два отделительных устройства (30), расположенных относительно первого направления (D1) на одной стороне и другой стороне средства захвата (35) и параллельно второй продольной кромке (66) опорной плоскости (64).
6. Устройство по п. 5, отличающееся тем, что блок селектора (34) расположен вдоль второй продольной кромки (66) с возможностью захвата и подъема участка по меньшей мере одного прутка (31).
7. Устройство по одному из пп. 1-6, отличающееся тем, что средство захвата (35) установлено на ползунке (67), выполненном с возможностью перемещения в направлении, параллельном первому направлению (D1), и предназначено для приведения средства захвата (35) из положения над плоскостью загрузки (64) в смещенное положение над отделительным устройством (30).
8. Устройство по одному из пп. 1-7, отличающееся тем, что указанный пункт (43) сбора содержит средство (73) временного размещения прутков (31) для формирования по меньшей мере части комплекта (A) прутков (31).
9. Устройство по одному из пп. 1-8, отличающееся тем, что оно снабжено блоком взвешивания (48), расположенным на выходе блока (34) селектора и выполненным с возможностью контроля веса комплекта (A) прутков (31).
10. Устройство по п. 9, отличающееся тем, что пункт сбора (43) расположен на выходе блока селектора (34) и на входе блока (48) взвешивания, а средство (73) временного расположения прутков (31) выполнено с возможностью подачи прутков (31) в блок (48) взвешивания.
11. Устройство по одному из пп. 1-10, отличающееся тем, что оно снабжено накопителем (60), расположенным на выходе пункта сбора и выполненным с секторами (62), каждый из которых предназначен для размещения одного или более комплектов (A) отобранных прутков (31).
12. Устройство по п. 11, отличающееся тем, что оно снабжено блоком съема (52) комплекта (A) прутков (31), выполненным с возможностью съема комплекта (A) прутков (31) и доставки его в один из секторов (62) накопителя (60).
13. Устройство по п. 12, отличающееся тем, что блок съема (52) расположен на выходе блока взвешивания (48) и на входе накопителя (60) и выполнен с возможностью съема комплекта (A) прутков (31) с блока (48) взвешивания и доставки их в накопитель (60).
14. Устройство по одному из пп. 1-13, отличающееся тем, что оно снабжено блоком управления (63), соединенным с датчиками (41) и выполненным с возможностью управления и обработки по меньшей мере данных подсчета и выбора прутков (31), выполняемых блоком (34) селектора.
15. Устройство по одному из пп. 1-14, отличающееся тем, что средство захвата содержит по меньшей мере подвижную магнитную головку (35).
16. Устройство по п. 15, отличающееся тем, что магнитная головка (35) может быть перемещена к пруткам (31) и от них посредством соответствующего приводного средства (36), и с возможностью взаимодействия с одним или более упорных элементов (38), выполненных с возможностью обеспечения автоматического высвобождения одного или более прутков (31), извлеченных магнитной головкой (35).
17. Способ манипулирования продолговатыми металлическими прутками (31), включающий загрузку прутков (31) на опорную плоскость (64), образованную элементами транспортера (25) блока загрузки (22), и перенос прутков (31) посредством элементов транспортера (25) в первом направлении (D1), поперечном длине прутков (31), к блоку селектора (34), отличающийся тем, что осуществляют захват и подъем относительно указанной опорной плоскости (64) по меньшей мере одного участка одного или более прутков (31) с использованием средства захвата (35) блока селектора (34), отделение от блока загрузки (22) одного или более прутков (31), поднятых средством захвата (35), путем перемещения во втором направлении (D2), поперечном первому направлению (D1), посредством кронштейнов (33’), высвобождение прутков в сторону пункта сбора (43) и определение количества прутков (31), извлеченных и высвобожденных средством захвата (35) в сторону пункта сбора (43), при этом используют кронштейны (33') крюкообразной формы, которые устанавливают из условия их расположения при извлечении прутков (31) выше указанной опорной плоскости (64) и отклонения их к пункту сбора (43), причем первый концевой участок (71) кронштейнов (33′) прикрепляют к элементу передачи движения (69), а второй свободный концевой участок (72) располагают с возможностью его контакта с прутками (31) при их извлечении и перекрытия по меньшей мере упомянутым вторым концевым участком (72) указанной опорной плоскости (64).
| КАРТРИДЖ ПРОЯВЛЕНИЯ | 2006 |
|
RU2412456C2 |
| DE 4035345 A, 14.05.1992 | |||
| US 3712458 A1, 23.01.1973 | |||
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ МАНИПУЛИРОВАНИЯ ДЛИННОМЕРНЫМИ ЭЛЕМЕНТАМИ | 2009 |
|
RU2521125C2 |
| Устройство для ориентированной укладки длинномерных заготовок | 1985 |
|
SU1301636A1 |

