Изобретение относится к подъёмным устройствам, а именно к оборудованию подъёмного отделения ствола рудничными скиповыми подъёмниками.
Известна скиповая пневмоподъёмная установка (Патент РК № 3343. Карьерный скиповой пневматический подъёмник. Николаев Ю.А. - Зарегистрирован в Государственном реестре изобретений 10.06.1996), включающая скип с гладкой цилиндрической частью, трассу в виде шахтного ствола с направляюще-уплотнительными устройствами, расположенными в стволе с шагом, равным половине высоты цилиндрической части скипа, воздуходувку, загрузочную и разгрузочную станции. Подъём гружёного скипа осуществляется за счёт потока воздуха, подаваемого воздуходувкой в ствол, спуск порожнего скипа происходит под собственным весом с выпуском воздуха в нижней части ствола в атмосферу.
Недостатком указанной установки является необходимость в высоком давлении воздуха, создаваемом воздуходувкой, из-за значительного аэродинамического сопротивления, вызванного многочисленными направляюще-уплотнительными устройствами.
Известна также скиповая пневмоподъёмная установка, включающая трассу с подъёмным трубопроводом, скип, имеющий цилиндрическую часть с закреплёнными на ней направляюще-уплотнительными устройствами и верхний открытый торец, и разгрузочную станцию (Таугер В. М., Волков Е. Б., Леонтьев А. А. Теоретико-механический расчёт устойчивости движения сосуда в шахтной скиповой пневмоподъёмной установке. - Изв. УГГУ, 2018, № 1 (49). - С. 89-93.). В разгрузочную станцию входит опрокидывающая секция, снабжённая фиксаторами скипа и установленная соосно с подъёмным трубопроводом с возможностью вращения на стойках посредством оси, соединённой с выходным валом мотор-редуктора, и приёмный бункер.
Гружёный скип по подъёмному трубопроводу поступает в опрокидывающую секцию разгрузочной станции. В крайнем верхнем положении опрокидывающей секции скип удерживается фиксаторами. Затем производится поворот опрокидывающей секции со скипом посредством мотор-редуктора в сторону приёмного бункера. Опрокидная секция и скип занимают наклонное положение над приёмным бункером, вследствие чего транспортируемый материал под собственным весом пересыпается в приёмный бункер. После опорожнения скипа путём реверсирования двигателя мотор-редуктора опрокидывающая секция со скипом возвращается в соосное с подъёмным трубопроводом положение. Спуск порожнего скипа происходит под собственным весом.
Недостаток известного технического решения состоит в наличии конструктивно сложного дорогостоящего мотор-редуктора и необходимости его технического обслуживания и ремонтов.
Целью изобретения является упрощение конструкции разгрузочной станции.
Указанная цель достигается тем, что поворот опрокидывающей секции осуществляется за счёт собственного веса гружёного скипа.
Сущность изобретения заключается в том, что в скиповой пневмоподъёмной установке, включающей подъёмный трубопровод, скип, имеющий цилиндрическую часть с закреплёнными на ней направляюще-уплотнительными устройствами и верхний открытый торец, и разгрузочную станцию, содержащую стойки, опрокидывающую секцию с фиксаторами скипа и приёмный бункер, опрокидывающая секция снабжена противовесом и тормозом-замедлителем вращения и установлена на стойках так, что центр тяжести опрокидывающей секции с гружёным скипом расположен между осью вращения опрокидывающей секции и приёмным бункером, центры тяжести опрокидывающей секции с гружёным и порожним скипами в положении разгрузки расположены с противоположных сторон от оси вращения указанной секции, причём обеспечивается выполнение неравенств:
где G1 - суммарный вес опрокидывающей секции и гружёного скипа;
G 2 - суммарный вес опрокидывающей секции и порожнего скипа;
a - эксцентриситет веса G1 относительно оси вращения опрокидывающей секции;
b - эксцентриситет веса G2 относительно оси вращения опрокидывающей секции;
М 1 - момент сопротивления вращению опрокидывающей секции с гружёным скипом;
М 2 - момент сопротивления вращению опрокидывающей секции с порожним скипом.
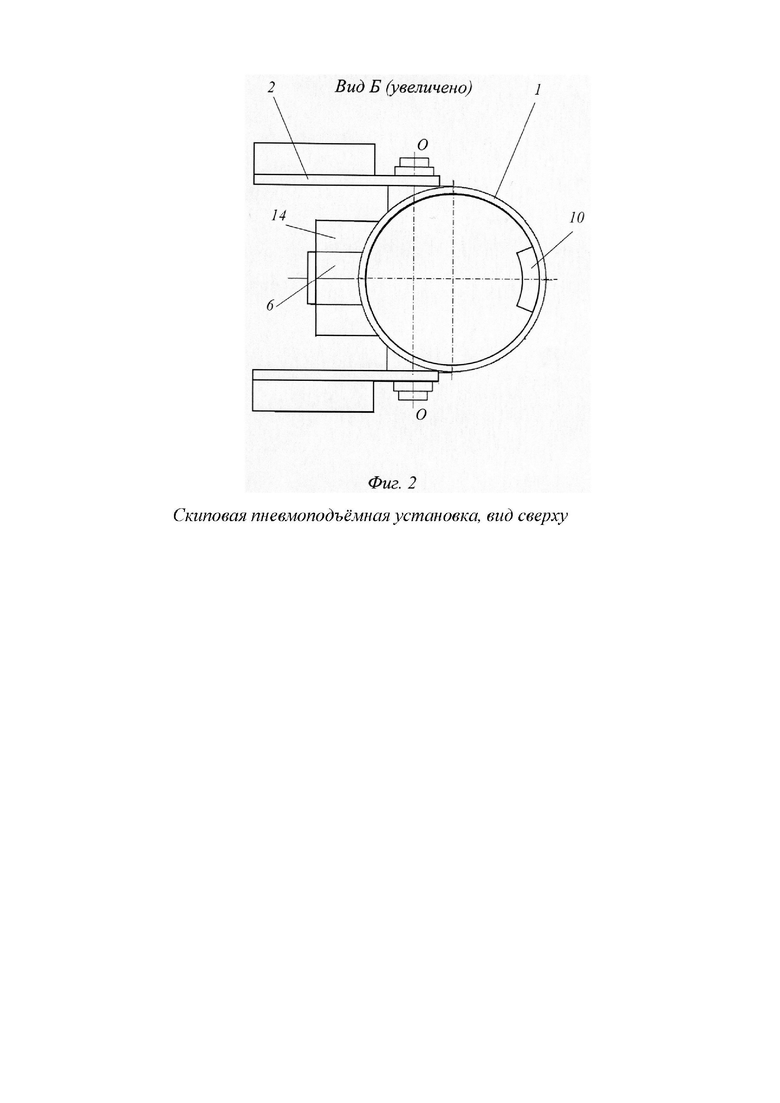
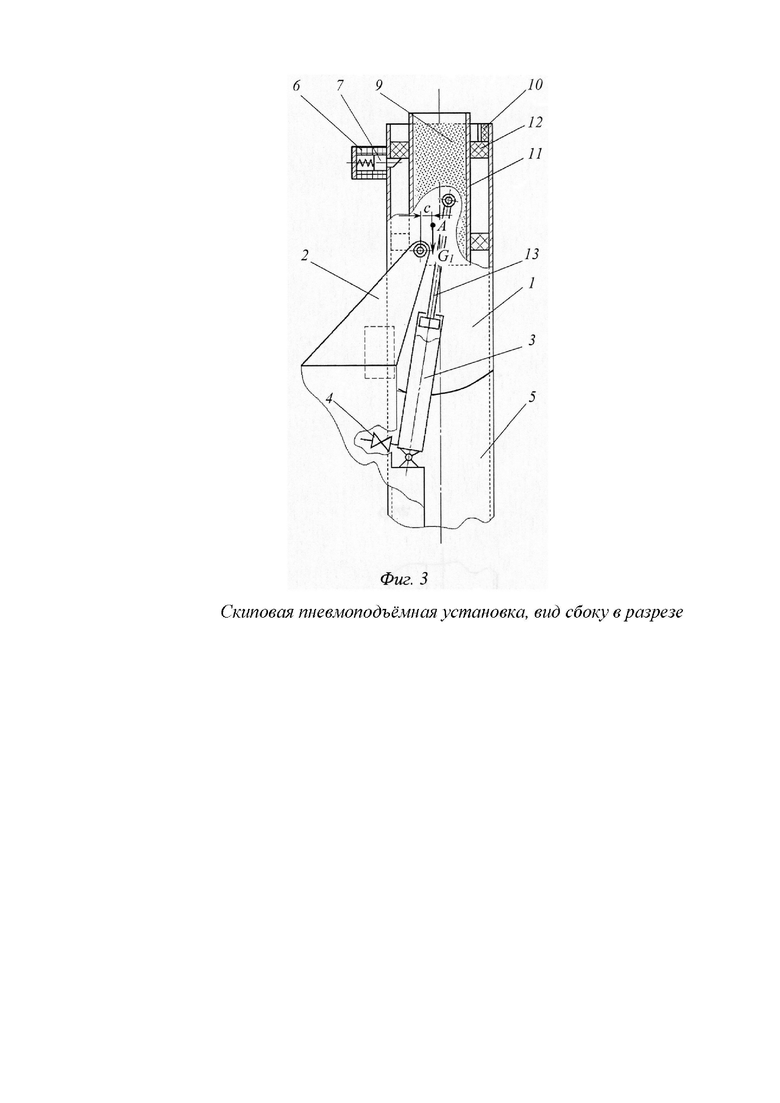
Разгрузочная станция предлагаемой скиповой пневмоподъёмной установки показана на фиг. 1 - 5. Опрокидывающая секция 1 (фиг. 1, 2), выполненная из отрезка трубы, внутренний диаметр которой равен внутреннему диаметру подъёмного трубопровода 5, установлена с возможностью вращения на стойках 2 не соосно с подъёмным трубопроводом с эксцентриситетом, равным е. К нижней части опрокидывающей секции 1 прикреплён противовес 14. Функцию фиксаторов скипа выполняют закреплённая на внешней поверхности опрокидывающей секции катушка 6 электромагнита (система питания электропитания катушки 6 не показана) с помещённым внутрь её с возможностью продольного перемещения подпружиненным стопором 7 и упор 10 (фиг. 2), прикреплённый к внутренней поверхности опрокидывающей секции в её верхней части. Тормоз-замедлитель вращения состоит из двух смонтированных на стойках 2 пневмоцилиндров 3 одностороннего действия, штоки 13 которых шарнирно соединены с опрокидывающей секцией 1, штоковые полости сообщаются с атмосферой непосредственно, а поршневые полости - через дистанционно управляемый кран 4. Система управления крана 4 на фиг. 1 - 5 не показана.
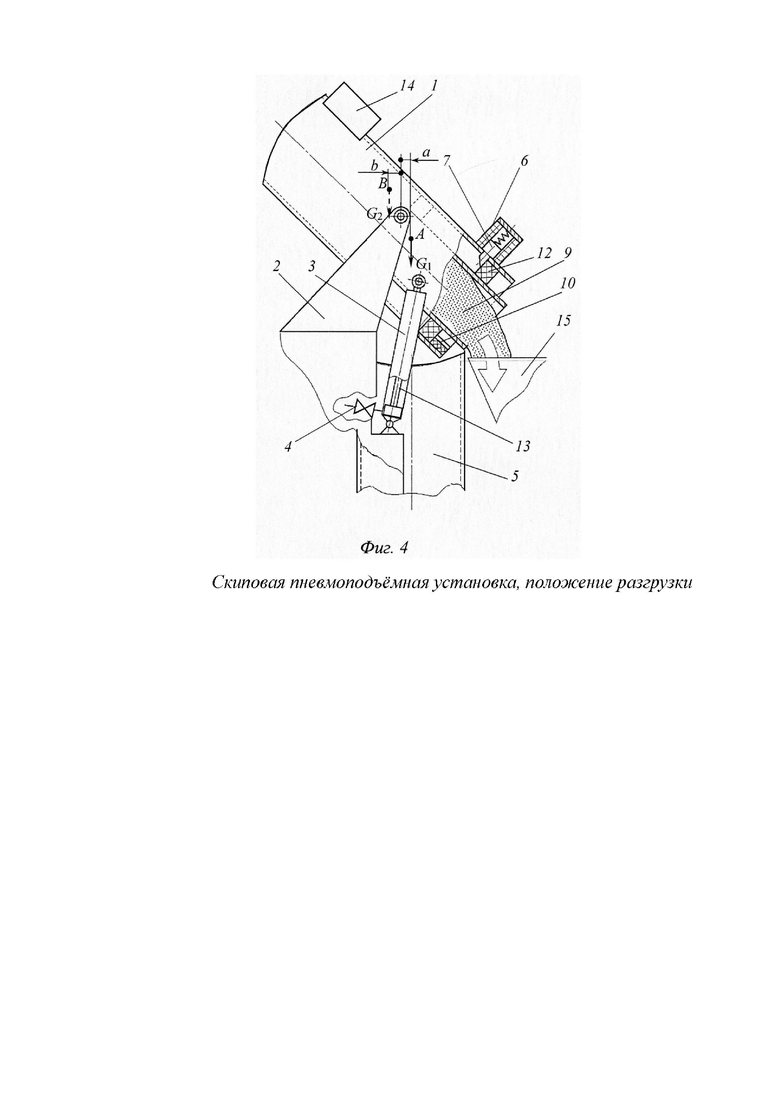
Скип 11 (фиг. 3) выполнен в виде цилиндрического контейнера с верхним открытом торцом, снабжённого направляюще-уплотнительными устройствами в виде колец 12. Показанный на фиг. 3 скип 11 заполнен транспортируемым материалом 9. Вблизи концевого участка подъёмного трубопровода 5 расположен приёмный бункер 15 (фиг. 4). На фиг. 1 - 4 приёмный бункер 15 не показан.
Работает скиповая пневмоподъёмная установка следующим образом.
В период подъёма скипа 11 по подъёмному трубопроводу 5 опрокидывающая секция 1 расположена соосно с подъёмным трубопроводом 5 (фиг. 1). Штоки 13 пневмоцилиндров 3 полностью выдвинуты, краны 4 закрыты. Катушка 6 обесточена, и стопор 7 полностью выдвинут из неё (фиг. 2).
В конце подъёма (фиг. 3) заполненный материалом 9 скип 11 входит в опрокидывающую секцию 1, воздействует кольцом 12 на стопор 7 и вдвигает его в катушку 6. В дальнейшем движении скипа 11 кольцо 12 освобождает стопор 7, который выдвигается из катушки 6 в исходное положение. Кольцо 12 входит в контакт с упором 10, и на этом подъём скипа 11 завершается. В крайнем верхнем положении скип 11 зафиксирован относительно опрокидывающей секции 1 стопором 7 и упором 10.
Общий вес опрокидывающей секции 1, скипа 11 и материала 9 показан на фиг. 3 в виде силы G1, приложенной в точке А, которая расположена на расстоянии a от оси О-О (фиг. 2) вращения поворотной секции относительно опор 2.
Вес противовеса 14 и эксцентриситет е подобраны такими, что выполняется неравенство
где G1 - суммарный вес опрокидывающей секции 1 и скипа 11 с материалом 9;
М 1 - момент сопротивления вращению опрокидывающей секции 1 со скипом 11, заполненным материалом 9.
Величина момента М1 обусловлена трением в парах вращения опрокидывающей секции 1 относительно стоек 2 и поршней 13 по внутренним поверхностям пневмоцилиндров 3.
Система дистанционного управления открывает краны 4, и поршневые полости пневмоцилиндров 3 сообщаются с атмосферой. Момент силы G1 на плече а преодолевает момент М1, штоки 13 пневмоцилиндров 3 начинают вдвигаться, обеспечивая вращение опрокидывающей секции 1 с расчётной угловой скоростью по часовой стрелке. После того как штоки 13 полностью вдвинутся, опрокидывающая секция 1 занимает положение разгрузки, показанное на фиг. 4, и система дистанционного управления закрывает краны 4.
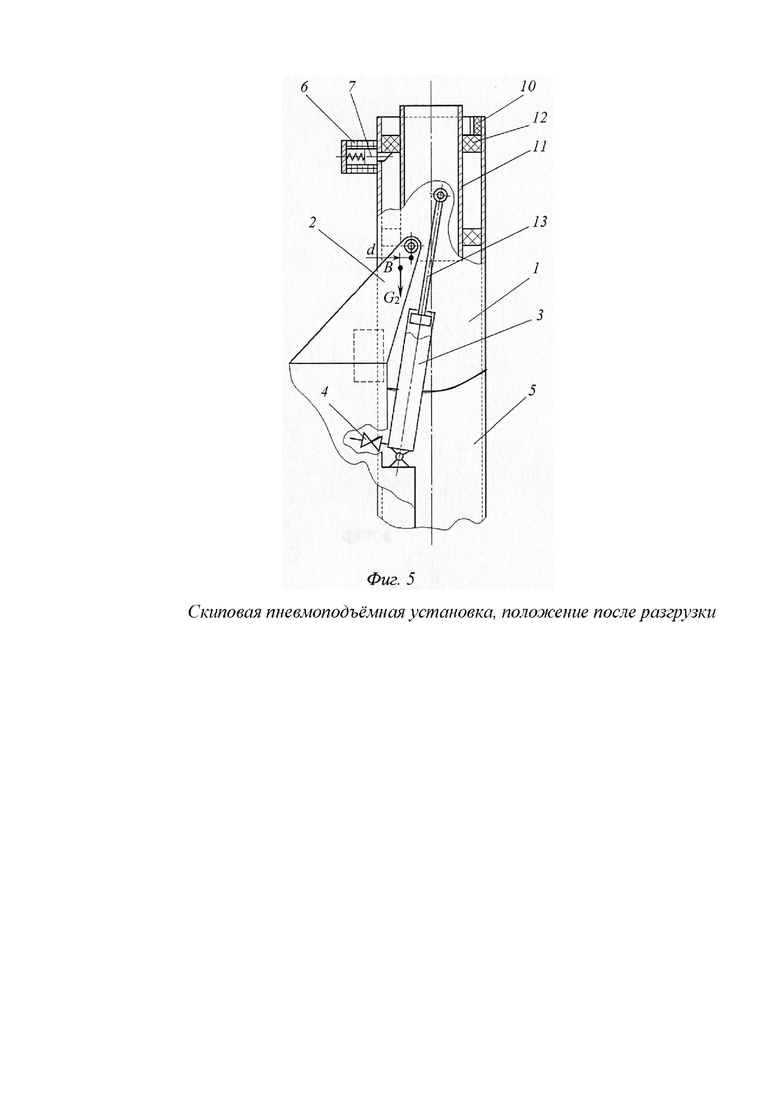
В положении разгрузки материал 9 под собственным весом пересыпается в приёмный бункер 15. После опорожнения скипа 11 суммарный вес опрокидывающей секции 1 и скипа 11 становится равным G2. Он показан на фиг. 4 в виде силы, приложенной в точке В, которая расположена на расстоянии b от оси О-О вращения опрокидывающей секции 1 относительно стоек 2 (фиг. 2). Вес противовеса 14 и эксцентриситет е подобраны такими, что выполняется неравенство
где G2 - суммарный вес опрокидывающей секции 1 и скипа 11;
М 2 - момент сопротивления вращению опрокидывающей секции 1 со скипом 11.
Система дистанционного управления открывает краны 4. Момент силы G2 на плече b преодолевает момент М2, штоки 13 пневмоцилиндров 3 начинают выдвигаться, обеспечивая вращение опрокидывающей секции 1 с расчётной угловой скоростью против часовой стрелки. После того как штоки 13 полностью выдвинутся, опрокидывающая секция 1 занимает положение, соосное с подъёмным трубопроводом 5 (фиг. 5), и система дистанционного управления закрывает краны 4.
Штоки 13 пневмоцилиндров 3 полностью выдвинуты и предотвращают дальнейшее вращение опрокидывающей секции 1.
Система электропитания подаёт электроэнергию на катушку 6, и под воздействием магнитного поля стопор 7 вдвигается в катушку 6, освобождая кольцо 12 скипа 11. Скип 11 под собственным весом начинает движение (на фиг. 5 - вниз) вдоль опрокидывающей секции 1 и далее по подъёмному трубопроводу 5. Система дистанционного управления закрывает краны 4, и устройство для разгрузки скипа возвращается в исходное положение, показанное на фиг. 1.
Оснащение опрокидывающей секции противовесом и тормозом-замедлителем вращения и установка её на стойках с расчётным эксцентриситетом обеспечит поворот опрокидывающей секции из исходного положения в положение разгрузки за счёт собственного веса опрокидывающей секции и гружёного скипа, а из положения разгрузки в исходное положение за счёт собственного веса опрокидывающей секции и порожнего скипа, что позволит упростить конструкцию разгрузочной станции путём исключения мотор-редуктора из её состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| СКИПОВАЯ ПНЕВМОПОДЪЁМНАЯ УСТАНОВКА | 2017 |
|
RU2667430C1 |
| Многоканатный подъемник | 1989 |
|
SU1782907A1 |
| Шахтная подъемная установка | 1990 |
|
SU1791318A1 |
| ШАХТНЫЙ СКИПОВОЙ ГРУЗОВОЙ ПОДЪЕМНИК | 2013 |
|
RU2549722C1 |
| Подъемная скиповая установка | 1987 |
|
SU1579451A3 |
| СКИПОВАЯ УСТАНОВКА ДЛЯ НАКЛОННОГО ПОДЪЕМА | 2005 |
|
RU2293702C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ ОТХОДОВ ПРОИЗВОДСТВА В ПОДЗЕМНЫЕ ВЫРАБОТКИ | 2006 |
|
RU2303133C1 |
| Скиповый подъемник | 1986 |
|
SU1397394A1 |
| Скиповый подъемник | 1980 |
|
SU927709A1 |
| Скиповой подъемник доменной печи | 1980 |
|
SU897854A1 |
Изобретение относится к оборудованию подъёмного отделения ствола рудничными скиповыми подъёмниками. Скиповая пневмоподъёмная установка включает подъёмный трубопровод, скип, имеющий цилиндрическую часть с закреплёнными на ней направляюще-уплотнительными устройствами и верхний открытый торец, а также разгрузочную станцию. Разгрузочная станция содержит стойки, опрокидывающую секцию с фиксаторами скипа и приёмный бункер. Опрокидывающая секция снабжена противовесом и тормозом-замедлителем вращения и установлена на стойках так, что размещение в ней гружёного скипа приводит к её повороту из исходного положения в положение разгрузки скипа в приёмный бункер, а опорожнение скипа - к возвращению из положения разгрузки в исходное положение. Изобретение обеспечивает упрощение конструкции разгрузочной станции. 5 ил.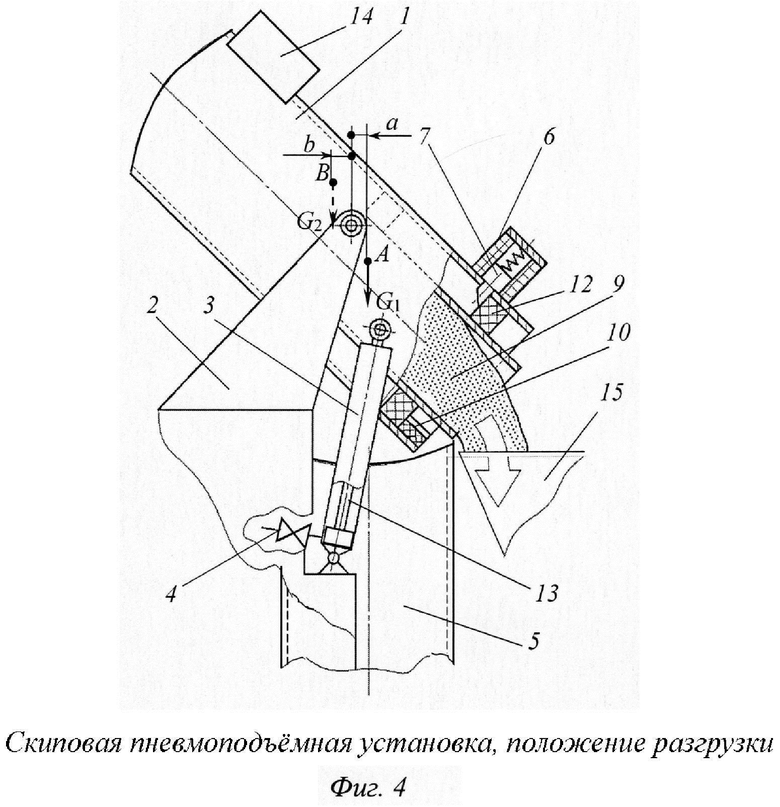
Скиповая пневмоподъёмная установка, включающая подъёмный трубопровод, скип, имеющий цилиндрическую часть с закреплёнными на ней направляюще-уплотнительными устройствами и верхний открытый торец, и разгрузочную станцию, содержащую стойки, опрокидывающую секцию с фиксаторами скипа и приёмный бункер, отличающаяся тем, что опрокидывающая секция снабжена противовесом и тормозом-замедлителем вращения и установлена на стойках так, что центр тяжести опрокидывающей секции с гружёным скипом расположен между осью вращения опрокидывающей секции и приёмным бункером, центры тяжести опрокидывающей секции с гружёным и порожним скипами в положении разгрузки расположены с противоположных сторон от оси вращения указанной секции, причём обеспечивается выполнение неравенств:
где G1 – суммарный вес опрокидывающей секции и гружёного скипа;
G2 – суммарный вес опрокидывающей секции и порожнего скипа;
a – эксцентриситет веса G1 относительно оси вращения опрокидывающей секции;
b – эксцентриситет веса G2 относительно оси вращения опрокидывающей секции;
М1 – момент сопротивления вращению опрокидывающей секции с гружёным скипом;
М2 – момент сопротивления вращению опрокидывающей секции с порожним скипом.
| ТАУБЕР В | |||
| М., ВОЛКОВ Е | |||
| Б., ЛЕОНТЬЕВ А | |||
| А | |||
| Теоретико-механический расчёт устойчивости движения сосуда в шахтной скиповой пневмоподъёмной установке | |||
| - Изв | |||
| УГГУ, 2018 | |||
| RU 2003621 C1, 30.11.1993 | |||
| Устройство для разгрузки опрокидного скипа | 1979 |
|
SU899450A1 |
| US 20100276253 A1, 04.11.2010. | |||

