Изобретение относится к колебательным системам и может использоваться в робототехнике для генерации сигналов, задающих походку шагающего робота, а также для управления режимами походки (например, переключение между режимами «ходьба»/ «быстрая ходьба»/«бег»).
В настоящей заявке на изобретение используются следующие понятия:
- Центральный генератор сигналов, который представляет собой генератор паттернов ритмического сигнала, далее по тексту - центральный генератор ритмов (ЦГР).
- Линейный диссипативный колебательный контур - пассивный генератор.
Движение человека и большинства животных - это ритмический процесс. В настоящее время в робототехнике большое внимание привлекают исследования управления движением конечностей. Это обусловлено стремительным развитием технологий и необходимостью роботов как в промышленности, так и дома. Особое внимание уделяется исследованиям в области управления конечностями роботов, которые направлены на конструирование движущихся механических и бионических устройств, способных решать сложные задачи в различных условиях окружающей среды [1-8]. Исследования в данной области привели к появлению и развитию центрального контроллера, так называемого центрального генератора ритмов (ЦГР), который генерирует ритмические команды для управления движениями.
В простейшем случае для управления походкой робота используются осцилляторы, например осциллятор Ван дер Поля. В данном случае сигналы с осцилляторов, входящих в ЦГР, подаются на отдельные сочленения («суставы») шагающего робота и определяют соответствующие углы поворотов звеньев конечностей. Такие осцилляторы отвечают за выработку правильного ритма движения для каждого сустава на основе сгенерированных паттернов.
Важнейшим свойством ЦГР является стабильная и предсказуемая генерация управляющих сигналов требуемой формы и амплитуды, а также задание и сохранение требуемых сдвигов фаз между отдельными сигналами. Также важна возможность управления режимом работы ЦГР.
Известно техническое решение «Система управления, устройство управления колебаниями и способ генерации управляющих сигналов», патент №US20110015790 [9], приоритет от 04.03.2008г. Изобретение позволяет реализовать сеть ЦГР, имеющую высокую управляемость. Система включает в себя набор отдельных ЦГР (CPG) и один задающий генератор (RG). Все элементы (CPG и RG) описываются уравнениями Ван дер Поля, а амплитуды и периоды выходных сигналов независимо регулируются внешним сигналом. Чтобы контролировать разность фаз между элементами CPG, период каждого CPG контролируется через соединения между каждым CPG и RG.
Недостатком такого технического решения является то, что в нем используется сеть, состоящая из множества активных осцилляторов, что приводит к усложнению конструкции при его использовании в многоногих роботах.
Наиболее близким техническим решением является устройство, описанное в статье «Использование нелинейных связей в центральном генераторе паттернов: повышение надежности за счет расширения области притяжения и производительности за счет уменьшения переходного времени», 2020 г. [10]. В данном устройстве содержится 4 осциллятора Ван дер Поля, связанных между собой нелинейными связями. Устройство работает следующим образом: отдельные осцилляторы генерируют управляющие сигналы, а нелинейные связи между осцилляторами поддерживают необходимые фазы колебаний каждого из осцилляторов, которые соответствуют ходьбе.
Недостатком такого технического решения является то, что при работе устройства используется колебательная система, состоящая из N активных нелинейных осцилляторов, что приводит к усложнению конструкции генератора при его использовании. Также такое решение усложняет реализацию, снижает надёжность и стабильность генератора ритмов.
Предлагаемое изобретение свободно от упомянутых недостатков и состоит из одного активного осциллятора в отличие от аналогов, у которых конструкция состоит только из N активных осцилляторов равных количеству конечностей, которыми планируется управлять. Также, в предлагаемом изобретении имеется, по меньшей мере, один линейный диссипативный колебательный контур - пассивный генератор, это позволяет упростить конструкцию, повысить надежность и стабильность колебательной системы в целом.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является упрощение конструкции и расширение возможностей генератора ритмов.
Технический результат достигается тем, что центральный генератор ритмов для генерации сигналов управления походкой шагающего робота состоит из одного активного осциллятора с нелинейным затуханием, и по меньшей мере, одного линейного диссипативного колебательного контура - пассивного генератора, включенного в цепь активного осциллятора параллельно через конденсатор.
Также технический результат достигается тем, что в центральном генераторе ритмов для генерации сигналов управления походкой шагающего робота активный осциллятор с нелинейным затуханием представляет собой осциллятор Ван дер Поля.
Также технический результат достигается тем, что центральный генератор ритмов для генерации сигналов управления походкой шагающего робота содержит элемент внешнего воздействия, включенного в цепь активного осциллятора параллельно через конденсатор.
Также технический результат достигается тем, что в центральном генераторе ритмов для генерации сигналов управления походкой шагающего робота элемент внешнего воздействия представляет собой генератор синусоидальных сигналов.
Сущность заявляемого изобретение поясняется чертежами.
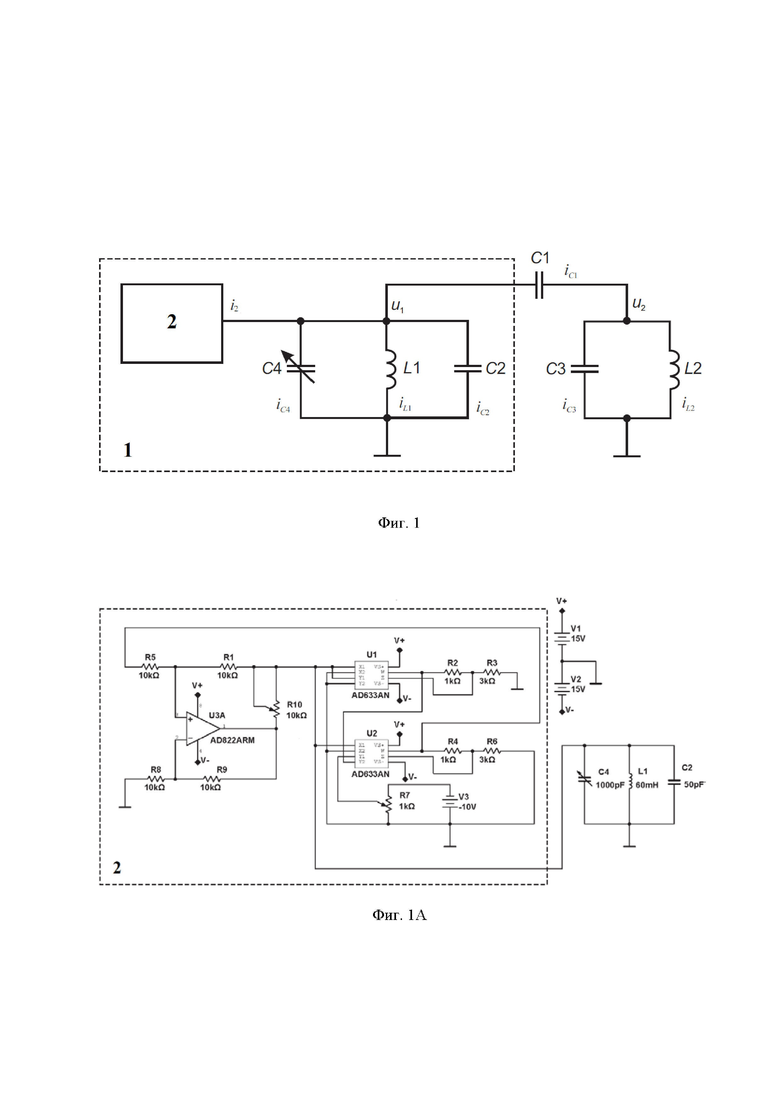
На фиг. 1 показана общая структурная схема предлагаемого генератора ритмов с одним пассивным колебательным контуром.
На фиг. 1А показана схема осциллятора Ван дер Поля и его нелинейного элемента.
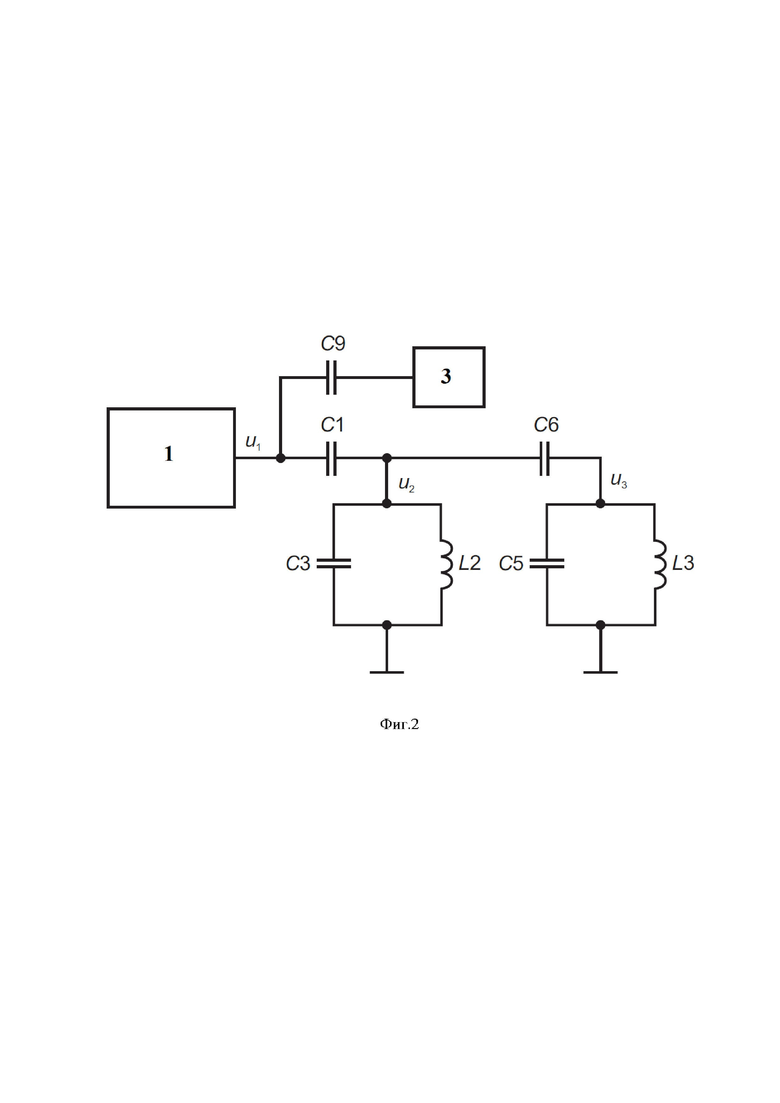
На фиг. 2 показана структурная схема предлагаемого генератора ритмов с двумя пассивными колебательными контурами.
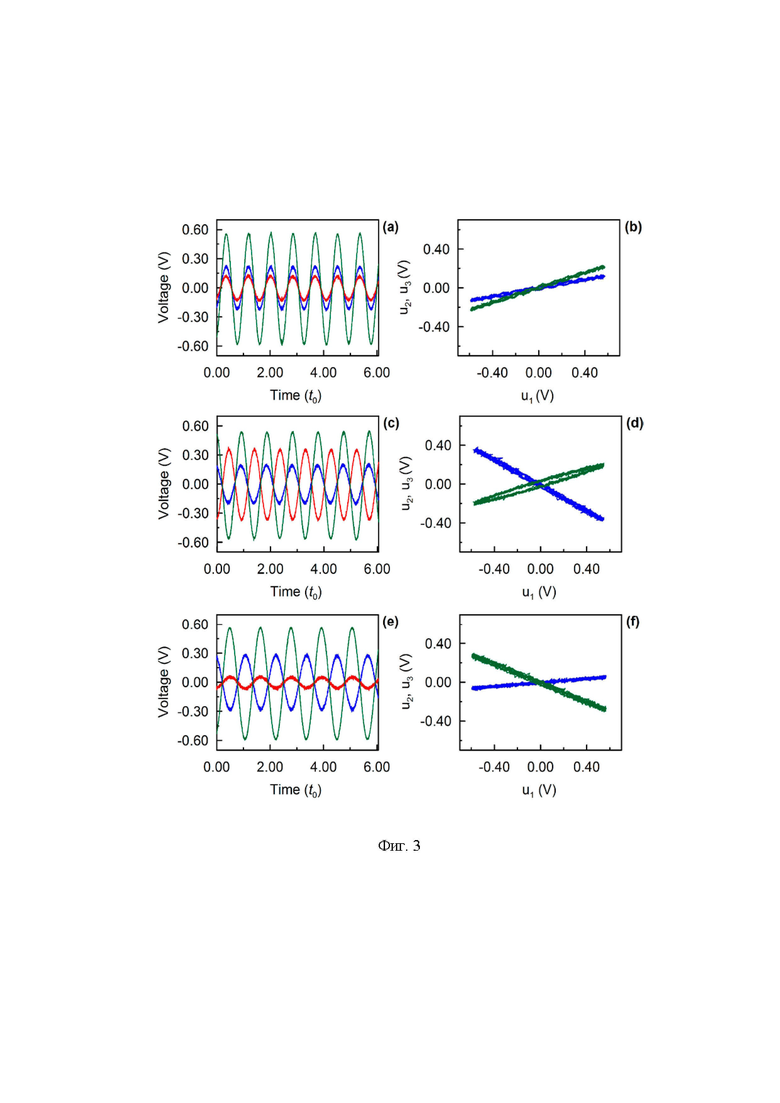
На фиг. 3 показаны экспериментальные временные ряды и фазовые портреты системы с одним активным осциллятором Ван дер Поля и двумя пассивными осцилляторами.
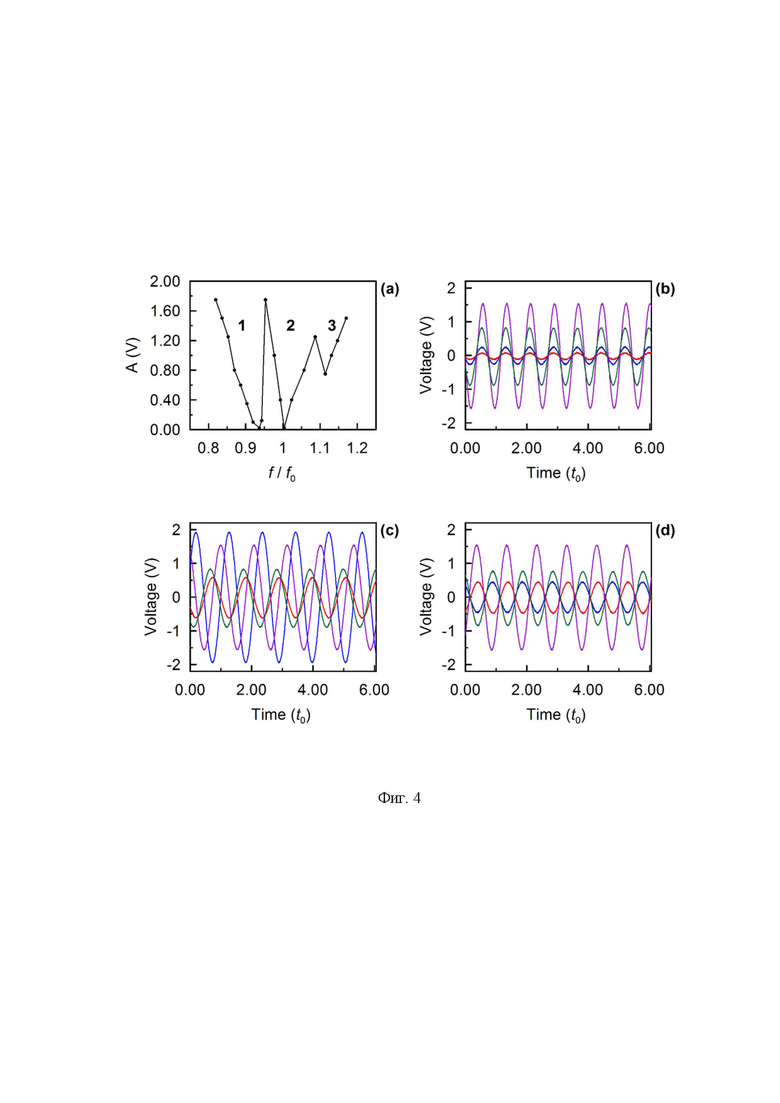
На фиг. 4 показана карта режимов предложенного генератора под внешним гармоническим воздействием.
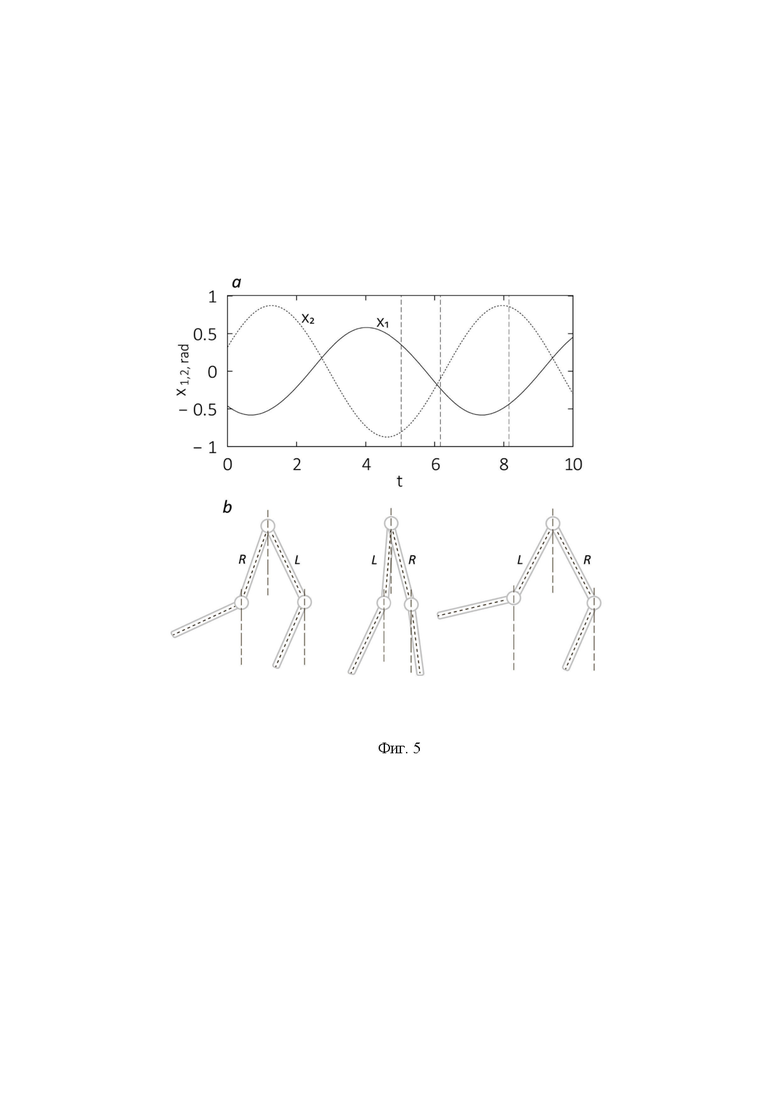
На фиг. 5 показаны: а) временные ряды, сгенерированные предложенным генератором ритмов, которые определяют угловые смещения бедра и голени первой ноги в режиме бега; б) моделируемая двуногая походка в моменты времени, обозначенные на (а).
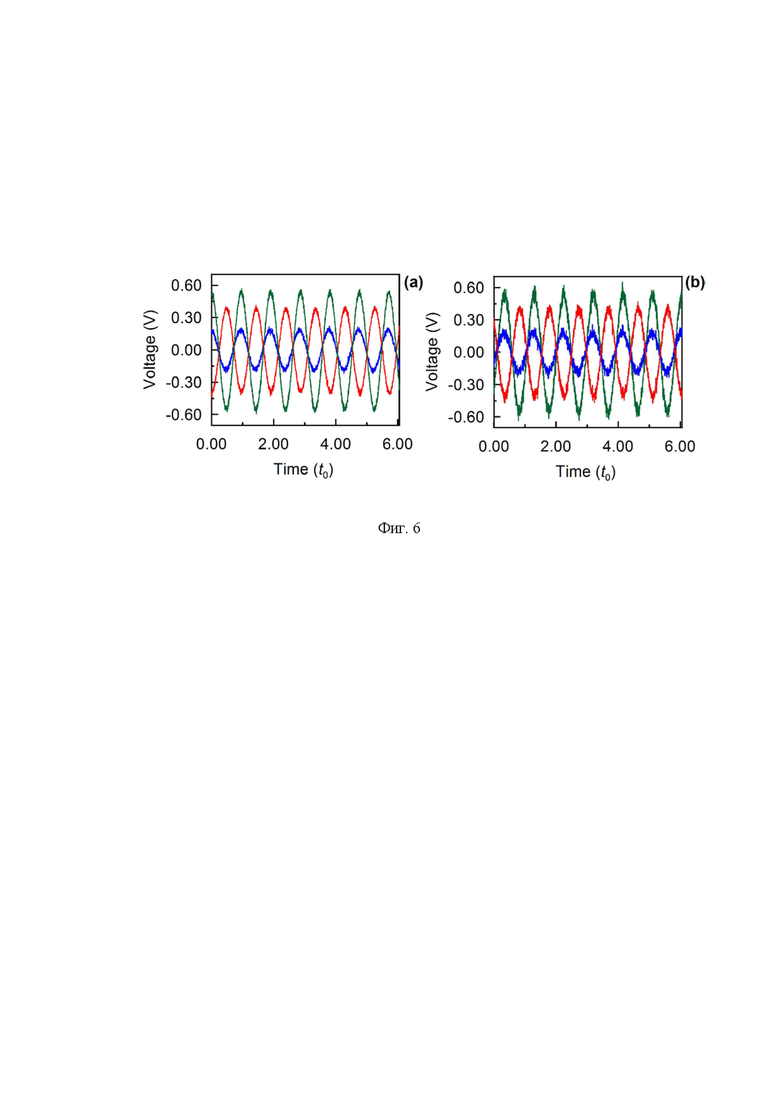
На фиг. 6 показаны экспериментальные временные ряды предложенного генератора под воздействием внешнего белого гауссова шума.
На фигурах обозначены: 1 - осциллятор Ван дер Поля; 2 - нелинейный элемент осциллятора Ван дер Поля; 3 - генератор синусоидальных сигналов. Условные обозначения на схемах соответствуют ГОСТ 2.710-81 «Единая система конструкторской документации. Обозначения буквенно-цифровые в электрических схемах».
Предлагаемый центральный генератор ритмов для генерации сигналов управления походкой шагающего робота работает следующим образом.
На фиг. 1 представлен центральный генератор ритмов, основанный на простой системе из двух связанных электрической схемой элементов, активного осциллятора (1) и пассивного генератора. Активный осциллятор (1) представляет собой автогенератор - осциллятор Ван дер Поля, в котором мягкое возбуждение обеспечивается двумя электронными умножителями (2), которые, в свою очередь, реализуют в схеме кубическую нелинейность (фиг. 1 и фиг.1А). Линейный диссипативный колебательный контур представляет собой пассивный генератор, который состоит из катушки индуктивности и конденсатора.
Предлагаемое изобретение реализует автоколебательные режимы, представляемые предельными циклами на фазовом портрете, и характеризуется мультистабильностью и гистерезисом.
В предлагаемое изобретением напряжение подается между клеммами полярности подключения источника питания + и - (фиг. 1А). Управляемый напряжением источник тока на базе операционного усилителя обеспечивает возбуждение цепи L1C2C4 (фиг.1 и фиг.1А). Пассивный колебательный контур (2) (фиг. 1) с цепью L2C3 (фиг.1) связан с активным осциллятором (1) через конденсатор C1. Переключение сосуществующих режимов реализуется путем варьирования емкости конденсатора С4, которая определяет расстройку собственных частот активного осциллятора (1) и пассивного генератора (2) (фиг. 1). Полезный управляющий сигнал снимается с точек u1 и u2 (фиг. 1).
Уравнения Кирхгофа для токов в активном осцилляторе и пассивном колебательном контуре имеют следующий вид:
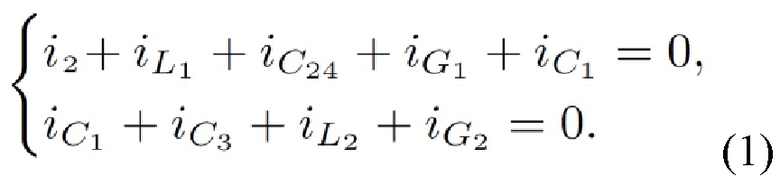
где iC24 = iC2 + iC4, iG1 и iG2 - токи, протекающие через резисторы в цепях с проводимостями G1 и G2, которые отражают суммарные потери в соответствующих цепях.
Далее преобразуем уравнения (1) в форму с напряжениями в цепях, считая, что вольт-амперная характеристика электронного умножителя (2) осциллятора (1) - кубическая полиномиальная функция (i2(u1) =αu1 + ):
):
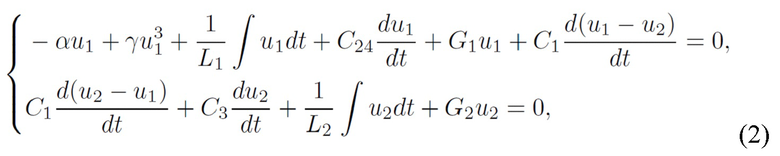
где C24 = C2+C4, u1 и u2 - напряжения в активном и пассивном контурах; данные сигналы являются выходными управляющими сигналами центрального генератора ритмов. Дифференцируя первое и второе уравнения во времени и переходя к новому безразмерному времени  , получим:
, получим:

Далее, заменив переменные и параметры следующим образом:
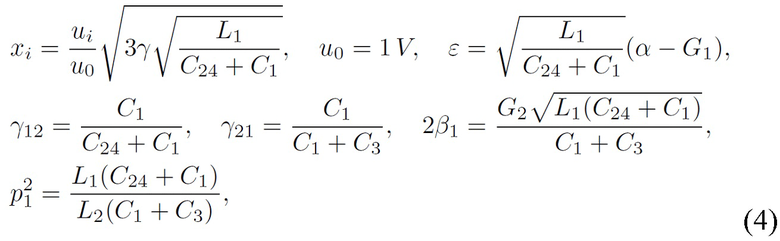
получаем уравнения в виде двух связанных элементов активного осциллятора и пассивного генератора, описывающих динамику:
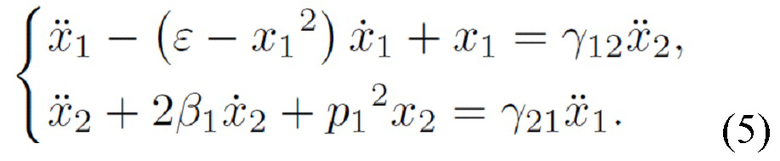
где  - параметр диссипации, управляющий накачкой энергией активного осциллятора;
- параметр диссипации, управляющий накачкой энергией активного осциллятора;  - параметр диссипации пассивного осциллятора; p1 - параметр, определяющий расстройку собственных частот осцилляторов;
- параметр диссипации пассивного осциллятора; p1 - параметр, определяющий расстройку собственных частот осцилляторов;  - параметры связи между соответствующими осцилляторами.
- параметры связи между соответствующими осцилляторами.
Для расширения возможностей центрального генератора ритмов имеется возможность увеличения числа пассивных генераторов (линейных диссипативных колебательных контуров), с которых снимаются управляющие сигналы, а также управления режимом работы. В устройстве на фиг. 2 используется два пассивных генератора L2C3 и L3C5 и элемент внешнего воздействия - генератор синусоидальных сигналов (3). В этом случае уравнение Кирхгофа принимает следующий вид:
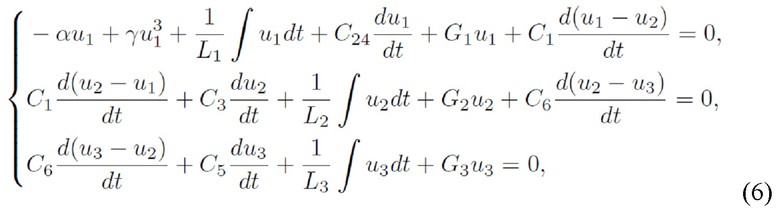
Обозначения в формуле (6) аналогичны используемым в формуле (1); G3 - проводимость резистора во втором пассивном контуре, отражающая суммарные потери в контуре; u3 - напряжение во втором пассивном контуре; данный сигнал является третьим выходным управляющим сигналом центрального генератора ритмов (первый и второй управляющие сигналы - u1 и u2).
В нормированных переменных система уравнений (6), описывающая динамику центрального генератора ритмов с одним активным (1) и двумя пассивными колебательными контурами (фиг. 2), принимает следующий вид:
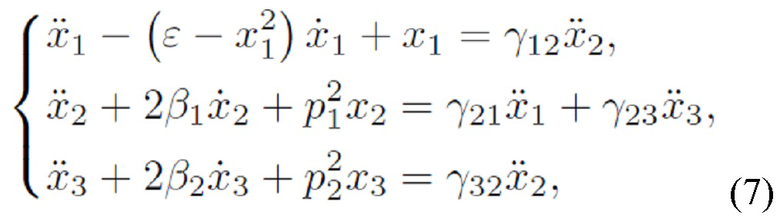
где
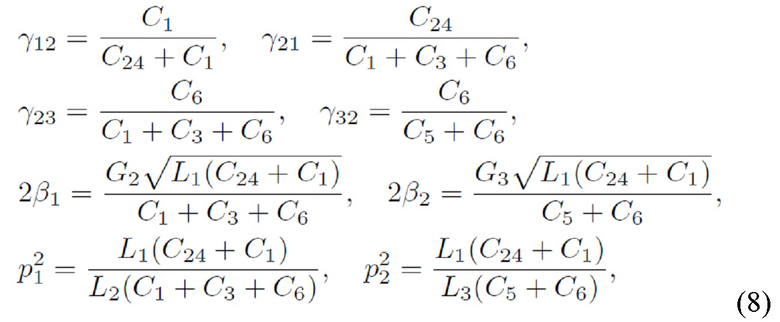
 - параметры диссипации пассивных осцилляторов; Р1;2 - параметры, определяющие расстройку собственных частот между активным и соответствующим пассивным осцилляторами;
- параметры диссипации пассивных осцилляторов; Р1;2 - параметры, определяющие расстройку собственных частот между активным и соответствующим пассивным осцилляторами;  - параметры связи между соответствующими осцилляторами; и
- параметры связи между соответствующими осцилляторами; и  определяются как в (4).
определяются как в (4).
Далее рассмотрим результаты проведенных экспериментов согласно заявляемому изобретению.
На фиг. 3 показаны временные ряды и фазовые портреты системы с одним активным осциллятором (1) и двумя пассивными контурами до (a, b), после первого (c, d) и после второго (e, f) бифуркационных переходов; при этом C4 = 150 пФ (a, b), C4 = 250 пФ (c, d), C4 = 400 пФ (e, f). Зеленая кривая на временных рядах соответствует сигналу u1 с активного осциллятора (1) показанного на фиг. 2, синяя кривая - сигналу u2 с первого пассивного колебательного контура, а красная кривая - сигналу u3 со второго пассивного колебательного контура.
На фиг. 4 представлена карта режимов предложенного ЦГР под внешним гармоническим воздействием, создаваемым генератором сигналов (3). Переключение между различными режимами динамики происходит за счет изменения собственной частоты активного осциллятора (1) или параметров внешнего воздействия, например с помощью генератора синусоидальных сигналов (3). Изменение собственной частоты меняет фазовые сдвиги между пассивными генераторами (линейными колебательными контурами) и соотношение амплитуд. Напротив, внешнее воздействие изменяет частоту и амплитуды, сохраняя фазовые сдвиги. Соотношение амплитуды и фазы между активным осциллятором и пассивным генератором контролирует походку и, таким образом, может регулироваться в зависимости от внешних условий. Например, частота внешнего сигнала может служить в качестве параметра для управления режимом ЦГР и реализации обратной связи, что позволит изменять характеристики паттернов, формируемых ЦГР, и контролируемых ими движений в зависимости от условий окружающей среды. Таким образом возможно управлять режимами, на фиг.3 представлены временные ряды при C4 = 170 пФ для режима 3 (f = f0 = 1.13, b); режима 1 (f = f0 = 0.93, c) и режима 2 (f = f0 = 1, d); A = 1.5 В. Зеленая кривая на временных рядах соответствует сигналу u1 с активного осциллятора (1), синяя кривая - сигналу u2 с первого пассивного колебательного контура, красная кривая - сигналу u3 со второго пассивного колебательного контура, фиолетовая кривая - сигнал внешнего гармонического воздействия.
В качестве иллюстрации на фиг. 5 представлены а) временные ряды, сгенерированные предложенным центрального генератора ритмов с двумя пассивными колебательными контурами, которые определяют угловые смещения бедра и голени первой ноги в режиме бега; x1 - сигнал с активного осциллятора, x2 - с первого пассивного контура; А = 0.03, f = 0.94;
b) снимки моделируемой двуногой походки в моменты времени, обозначенные вертикальными пунктирными линиями на (а).
Вследствие того, в реальных системах практически всегда присутствуют шумы различного характера, необходимо, чтобы ЦГР был устойчивым к воздействию внешних шумов. Было показано, что характеристики выходных сигналов в предложенном ЦГР стабильны при наличии интенсивных внешних шумов. Для иллюстрации этого на фиг. 6 представлены экспериментальные временные ряды предложенного ЦГР под воздействием внешнего белого гауссова шума, создаваемого генератором синусоидальных сигналов (3).
На фиг.6 представлена (a) амплитуда шума в четыре раза меньше амплитуды напряжения в активном осцилляторе, т. е. отношение сигнал/шум (SNR) составляло 24 дБ; (b) SNR = 12 дБ. Вносимый шум не влияет на среднюю частоту колебаний в системе; переключение колебательных режимов осуществляется даже при SNR = 12 дБ, а фазовые сдвиги между сигналами сохраняются даже при высоких уровнях шума.
Основными преимуществами предлагаемого центрального генератора ритмов для генерации сигналов управления походкой шагающего робота, по сравнению с известными техническими решениями являются следующие.
Во-первых, в предлагаемом решении имеется возможность изменять амплитудные и фазовые соотношения между активным осциллятором (осциллятором Ван дер Поля) и линейным диссипативным колебательным контуром, что позволяет управлять походкой робота, задавая её ритм.
Во-вторых, в предлагаемом решении используется генератор синусоидальных сигналов, что позволяет изменять в колебательной системе центрального генератора ритмов частоту и амплитуду, сохраняя фазовые сдвиги между генераторами. Это позволяет управлять режимами центрального генератора ритмов.
Литература
1. L.M. Izquierdo-Coordoba, J.M. Rosario, D.A. Hurtado, in Advanced Robotics and Intelligent Automation in Manufacturing (IGI Global, 2020), pp. 233-268.
2. C.M. Pinto, Nonlinear Dynamics 70 (3), 2089, 2012г.
3. M. Vukobratovic, B. Borovac, International Journal of Humanoid Robotics 1(01), 157, 2004г.
4. B. Siciliano, O. Khatib, Springer Handbook of Robotics (Springer, 2016г.).
5. G. Taga, Biological Cybernetics 78(1), 9, 1998г.
6. H. Kimura, Y. Fukuoka, A.H. Cohen, The International Journal of Robotics Research 26 (5), 475, 2007г.
7. A.J. Ijspeert, Neural Networks 21 (4), 642, 2008г.
8. S.L. Hooper, e LS, 2001г.
9. Патент США №US20110015790, «Система управления, устройство управления колебаниями и способ генерации управляющих сигналов», приоритет от 04.03.2008г.
10. Alireza Bahramian, Ali Nouri, Farzad Towhidkhah, Hamed Azarnoush and Sajad Jafari, «Introducing a nonlinear coupling for central pattern generator: Improvement on robustness by expanding basin of attraction and performance by decreasing the transient time», Journal of Vibration and Control, 2020, Vol. 0(0) 1-10.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРАТОР ШУМА | 1990 |
|
RU2030830C1 |
| Мобильный шагающий робот | 2023 |
|
RU2834558C1 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2486636C1 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2496221C2 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2568927C1 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2698543C1 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2599348C2 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2473165C2 |
| СПОСОБ ГЕНЕРАЦИИ ВЫСОКОЧАСТОТНЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461952C1 |
| Фазогенераторный измеритель магнитной восприимчивости | 1986 |
|
SU1420564A1 |
Изобретение относится к колебательным системам и может использоваться в робототехнике для генерации сигналов, задающих походку шагающего робота, а также для управления режимами походки. Центральный генератор ритмов для генерации сигналов управления походкой шагающего робота состоит из одного активного осциллятора с нелинейным затуханием и по меньшей мере одного линейного диссипативного колебательного контура, включенных в цепь активного осциллятора параллельно через конденсатор. Технический результат заключается в упрощении конструкции и расширении возможностей генератора ритмов. 3 з.п. ф-лы, 7 ил.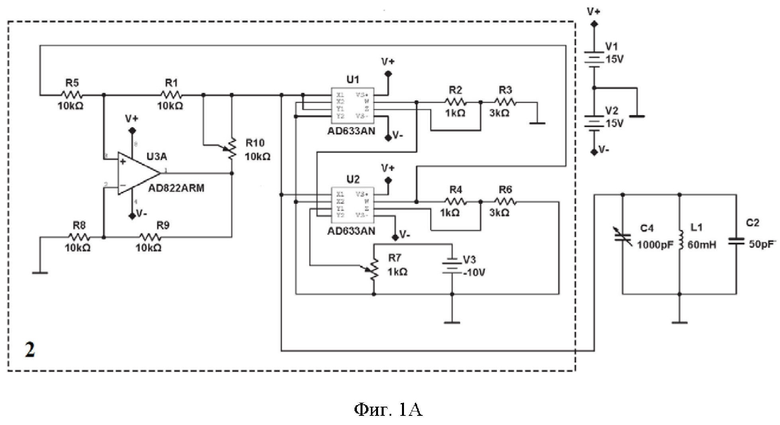
1. Центральный генератор ритмов для генерации сигналов управления походкой шагающего робота состоит из одного активного осциллятора с нелинейным затуханием и по меньшей мере одного линейного диссипативного колебательного контура – пассивного генератора, включенного в цепь активного осциллятора параллельно через конденсатор.
2. Центральный генератор ритмов для генерации сигналов управления походкой шагающего робота по п.1, отличающийся тем, что активный осциллятор с нелинейным затуханием представляет собой осциллятор Ван дер Поля.
3. Центральный генератор ритмов для генерации сигналов управления походкой шагающего робота по п.1 или 2, отличающийся тем, что содержит элемент внешнего воздействия, включенный в цепь активного осциллятора параллельно через конденсатор.
4. Центральный генератор ритмов для генерации сигналов управления походкой шагающего робота по п.3, отличающийся тем, что элемент внешнего воздействия представляет собой генератор синусоидальных сигналов.
| ЧАСТОТНО-МОДУЛИРОВАННЫЙ ПРЕОБРАЗОВАТЕЛЬ С ПОСЛЕДОВАТЕЛЬНО-ПАРАЛЛЕЛЬНЫМ РЕЗОНАНСОМ | 1992 |
|
RU2154886C2 |
| СПОСОБ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ В ЭЛЕКТРИЧЕСКОМ КОНТУРЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2127482C1 |
| ГЕНЕРАТОР ШУМА | 1990 |
|
RU2030830C1 |
| KR 20020061609 A, 24.07.2002. | |||

