ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области робототехники, а именно к многоногим шагающим роботам с цикловыми движителями.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Из уровня техники известен многофункциональный робот, имитирующий скорпиона (см. CN115384654A, опубл. 25.11.2022), который относится к области техники бионических роботов. Робот состоит из верхней пластины, нижней пластины, двух механических клешней, шести механических ног и механического хвоста. Верхняя пластина и нижняя пластина соединены, образуя корпус робота, имитирующего скорпиона, шесть механических ног расположены симметрично с двух сторон корпуса робота, механический хвост расположен в центре задней части. корпуса робота, а два механических захвата соединяются посредством соединительного механизма и затем располагаются на переднем конце корпуса робота. Два механических захвата расположены по обеим сторонам корпуса робота соответственно. Робот подходит для обнаружения неизвестной среды.
Наиболее близким аналогом заявленного устройства может быть выбран бионический робот-разведчик (см. CN216098961U, 26.10.2021). Робот состоит из бионического базового корпуса, механизмов пространственных кулачков, расположенных на двух сторонах бионического базового корпуса, множества подвижных стержневых частей, подвижно соединенных с двумя сторонами бионического базового корпуса, и приводного механизма, соединенного с механизмами пространственных кулачков и используемого для приведения механизмов пространственных кулачков во вращение для достижения функции ходьбы. Верхний конец подвижного стержня контактирует с механизмом пространственного кулачка, образуя пару кулачков. Механизм привода регулируемой ячейки включает в себя силовой узел, направляющую ограниченной формы, расположенную вдоль направления длины упругого корпуса ножки и используемую для ограничения формы, и приводится в движение силовым компонентом для возвратно-поступательного движения.
Бионический робот-разведчик, описанный в ближайшем аналоге, может встретить трудности при перемещении по сложному рельефу, несмотря на хорошо подобранные особенности механической структуры робота, этого недостаточно для перемещения робота по сложному рельефу.
КРАТКОЕ ИЗЛОЖЕНИЕ ИЗОБРЕТЕНИЯ
Техническим результатом изобретения является тактильное очувствление шагающего робота.
Технический результат достигается посредством мобильного шагающего робота, содержащего корпус, перемещающийся при помощи ног робота.
Мобильный шагающий робот характеризуется тем, что и корпус состоит из двух сегментов с одной активной степенью свободы, на котором размещены от 8 до 12 независимых педипуляторов, при этом в каждом сегменте размещено одинаковое количество педипуляторов, выполненных в виде C-образных ног, приводимых в движение цикловым движителем с одной степенью свободы, на каждой из которых размещены проприоцептивные сенсоры, включающие акселерометр, гироскоп, датчики силы, на каждом цикловом движителе.
В предпочтительном варианте выполнения датчики силы выполнены на основе преобразователя силы – пьезорезистивного датчика.
В предпочтительном варианте выполнения преобразователь силы состоит из двух медных оболочек, разделенных слоем полимерной пленки, пропитанной сажей для придания ей электропроводности.
В предпочтительном варианте выполнения блоком управления движения можно управлять вручную.
КРАТКОЕ ОПИСАНИЕ РИСУНКОВ
Сущность изобретения поясняется чертежами, на которых:
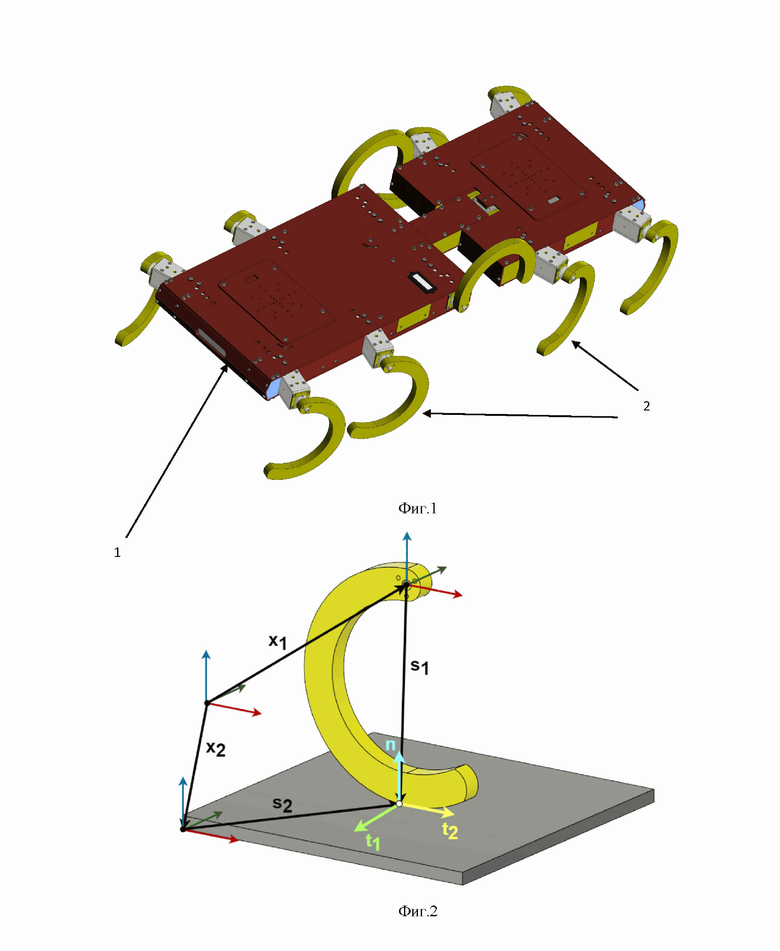
На рис.1 - пример многоногого шагающего робота;
На рис.2 - описание переменных для модели взаимодействия опорной поверхности и ноги робота;
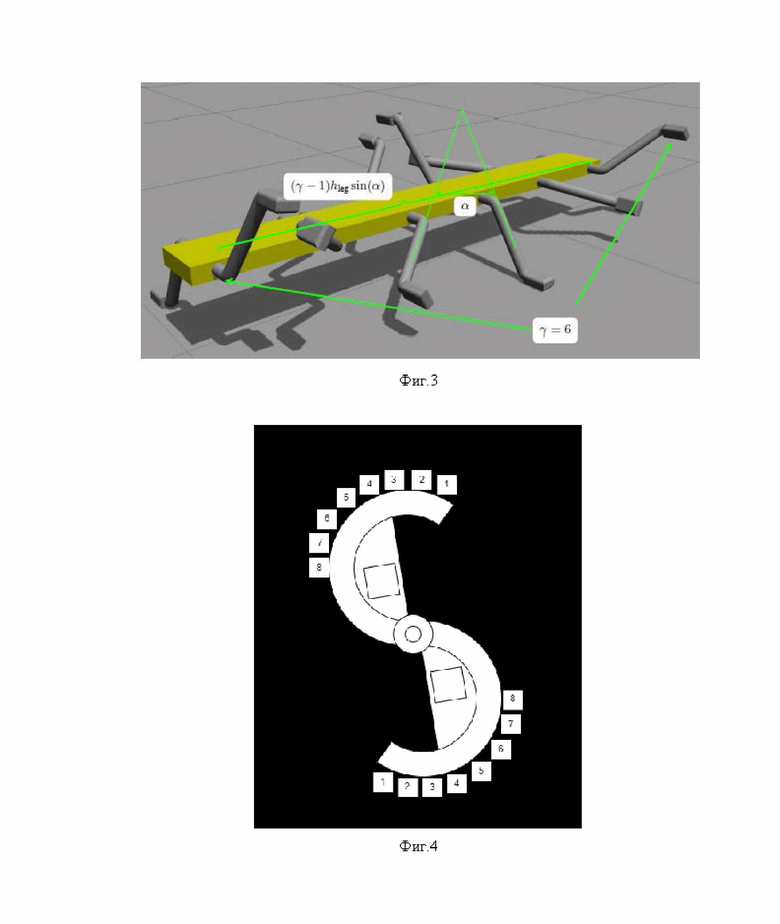
На рис.3 - схема модели робота для генетического алгоритма;
На рис.4 - пояснение по расположению сенсоров на ноге робота;
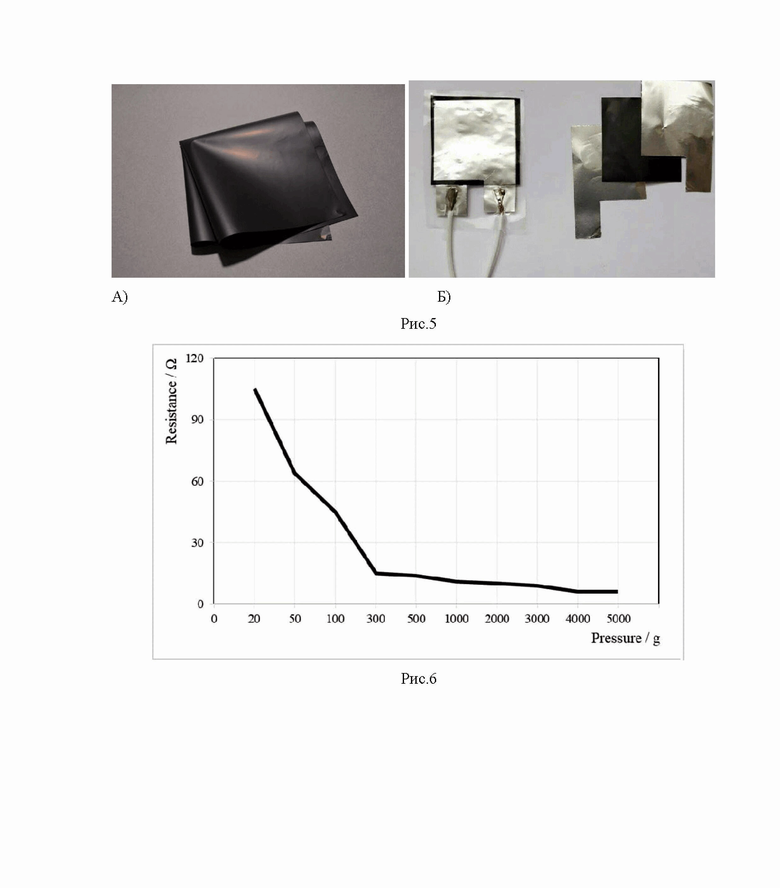
На рис.5 - примеры использования Velostat;
На рис.6 - график зависимости прикладываемого веса от сопротивления.
Позиции на фиг.1 обозначают следующее:
1 - корпус робота;
2 - нога робота
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Заявленный мобильный робот представлен неограничивающим вариантом исполнения робота корпус которого состоит из двух сегментов с одной активной степенью свободы. Робот обладает 12 независимыми педипуляторами, 6 ног в первом сегменте и 6 во втором (рис.1).
Особенность конструкции робота в том, что возможно изменять угол между ногой и корпусом робота. Данное конструктивное изменение позволило сделать перемещение робота всенаправленным, то есть робот может двигаться во все стороны без смены ориентации корпуса робота.
Мобильный шагающий робот характеризуется тем что на корпусе размещены от 8 до 12 независимыми педипуляторов при этом в каждом сегменте размещено одинаковое количество C-образных ног, приводимых в движение цикловым движителем с одной степенью свободы, на каждой из которых размещены проприоцептивные сенсоры, включающие акселерометр, гироскоп, датчики силы, на каждом моторе. Датчики силы выполнены на основе преобразователя силы- пьезорезистивного датчика и состоят из двух медных оболочек, разделенных слоем полимерной пленки, пропитанной сажей для придания ей электропроводности. В предпочтительном варианте выполнения применяют полимерную пленку Velostat.
Показано, что оптимальное количество ног для циклового движителя с одной степенью свободы в ноге находится в диапазоне от 8 до 14 ног. Чем больше количество полученных точек на пройденной поверхности, тем выше будет детализация карты. Одним из способов увеличения детализации это увеличение количества ног у робота. С другой стороны, это увеличивает длину робота, а следовательно робот хуже сможет проходить узкие участки с обилием поворотов. Чем большее расстояние робот сможет пройти за одно и то же время, тем быстрее будет построена карта и робот меньше повлияет на окружающую среду при прочих равных условиях.
Для цикловых движителей с одной степенью свободы в ноге вопрос о количестве ног не имеет однозначного решения. Поэтому необходимо провести структурный синтез, чтобы определить их количество. Данная задача решалась с помощью генетического алгоритма (рис.3).
Генетический алгоритм - это эвристический алгоритм поиска, используемый для решения задач оптимизации и моделирования путем случайного подбора, комбинирования и вариации искомых параметров с использованием механизмов, аналогичных естественному отбору в природе. Для решения задачи использовалась библиотека Deap.
Существует несколько типов датчиков, которые могут измерять контактные силы и распределение давления. Это могут быть оптические, пьезорезистивные, пьезоэлектрические, магнитные, емкостные, на основе оптических волокон.
Промышленные датчики силы и момента (F/T) широко распространены на гуманоидах (Atlas, Fedor) или четвероногих (Spot, AnyMal). Однако они слишком велики для небольших роботов, таких как RHEX, WHEGS или StriRus. Оптические и магнитные датчики обладают теми же недостатками. Емкостные датчики требуют высокой точности изготовления. Кроме того, датчики перечисленных типов довольно дороги, что делает их использование нецелесообразным в исследовательских роботах, которые работают в опасных условиях и могут быть потеряны в процессе исследования пещеры. Недорогой альтернативой являются тензометрические датчики.
Самый популярный тип тензометрического датчика - тензорезистивный датчик. Другой тип - пьезорезистивные датчики на основе проводящих волокон или полимеров. Они недорогие, очень гибкие и компактные. Одним из основных недостатков является значительный гистерезис.
В представленной роботе используется материал Velostat (Linqstat) (рис.5а) в качестве промежуточного слоя для датчика (рис.5б).
Датчик состоит из двух медных оболочек, разделенных слоем Velostat. Velostat - это упаковочный материал, изготовленный из полимерной пленки (полиолефины), пропитанной сажей для придания ей электропроводности. Он используется для защиты предметов или устройств, которые могут быть повреждены электростатическим разрядом. Свойство изменять свое сопротивление при изгибе или давлении делает его популярным решением для изготовления недорогих датчиков давления. Датчик состоит из двух медных оболочек, разделенных слоем Velostat. Давление на датчик приводит к изменению его сопротивления: чем выше давление, ниже сопротивление. Измеренное сопротивление Velostat образует делительнапряжения с постоянным резистором R1...R8.
При исследовании преобразователя силы на основе Velostat, было замечено, что площадь нажатия влияет на показания преобразователя. Поэтому было решено характеризовать материал для случаев, когда нагрузка меньше, чем размер сенсора.
Созданный преобразователь состоит из двух медных оболочек, разделенных слоем Velostat. Давление на датчик приводит к изменению его сопротивления: чем выше давление, тем ниже сопротивление. На (рис.6) показана рабочая область сенсора, основанная на весе, который может быть приложен на одну ногу робота.
Контакт ног робота с опорной поверхностью (рис.2) описывается на базе модели сухого трения.
Способ перемещения мобильного шагающего робота основан на его тактильном очувствлении. Последовательно получают информацию о внешней среде, которая поступает от проприоцептивных сенсоров, локализационных систем и систем технического зрения, включающих акселерометр, гироскоп, датчики, размещенные на каждой ноге шагающего робота и энкодеры, размещенные на каждом моторе. Информацию внешней среды также воспринимают локализационные системы, которые включают систему радиомаяков, размещенную мобильным шагающем роботом. Также информация внешней среды воспринимается системами технического зрения, включающими видеокамеру, в предпочтительном варианте выполнения Time-of-flight-камеру. Далее производят локализацию шагающего робота, содержащую основную локализация, которая проводится посредством энкодеров и системы технического зрения, а запасную локализацию, которая производится всеми проприоцептивными сенсорами и локализационной системой. На основании данных локализации происходит построение модели местности, которое обобщает данные определения физических свойств поверхности, построения карты местности и определения геометрических свойств поверхности. При этом определение физических и геометрических свойств поверхности происходит посредством датчиков силы, размещенных на каждой ноге робота, построение карты местности происходит на основании данных системы технического зрения. Информация от систем технического зрения и систем построения местности передается оператору шагающего робота, далее на систему планирования движения робота, через блок управления движения и на систему управления приводами робота и механическую систему робота. Блоком управления движения можно также управлять вручную. Данные с датчиков силы, с момента на моторе на основе предварительного обучения, данные обрабатываются и кластеризуются, на основе предварительно определенной базе знаний территорий.
Полученные данные попадают оператору, и оператор может управлять роботом, как в ручном режиме, так и просто задав точку, куда роботу нужно прийти.
Эта высокоуровневая команда передается в блок управления движением, которая в последствии преобразуется в низкоуровневые команды для приводов робота. С помощью данных команд, механическая система, представленная разработанным роботом, приводится в движение и выполняется поставленная оператором задача.
Информация, поступающая с различных сенсорных устройств, используется в системе управления робота для обнаружения и распознавания объектов внешней среды, построения модели окружающих поверхностей, а также для управления движением робота и его манипуляторов при выполнении различных технологических операций. В соответствии с этим, используемые в роботах предложенного класса, группы сенсорных устройств можно описать как сенсоры, необходимые для выявления свойств внешней среды, отдельных объектов и обеспечения перемещения исполнительных органов.
К первой из указанных групп относятся сенсорные устройства, предназначенные для выявления различных физико-химических свойств объектов среды, включая, в частности, устройства для выявления параметров рельефа в рабочей зоне мобильных роботов, специальных признаков для обнаружения и распознавания определенных объектов, положения и их ориентации в рабочей зоне относительно робота и т.п.
Ко второй группе относятся датчики обратной связи (положения, скорости, ускорения), усилий, возникающих при взаимодействии робота с внешней средой, прикосновения, проскальзывания и т.д.
Такое разделение сенсорных устройств достаточно условно, поскольку, например, сенсорные устройства первой группы могут быть использованы и для определения положения захвата манипулятора робота в рабочей зоне, т.е. играть роль датчиков обратной связи при управлении движением.
Сенсорные устройства робота могут воспринимать информацию на различных расстояниях от ее источника. По этому признаку сенсорные устройства делятся на сверхближние, ближние, дальние и сверхдальние (работающие вне рабочей зоны).
Сенсорные устройства сверхближнего действия используют для очувствления захватов и других частей манипуляторов, а также корпуса робота. Они позволяют фиксировать их контакт с объектами внешней среды (тактильные датчики), измерять усилия, возникающие в месте взаимодействия (силометрические датчики), фиксировать проскальзывание объектов.
Сенсорные устройства ближнего действия обеспечивают получение необходимой информации в непосредственной близости от робота, но бесконтактным способом. К таким устройствам относятся локационные сенсоры захвата, неконтактные бамперы, различные дальномеры ближнего действия, плотнометры грунта и т.п.Бесконтактные измерительные устройства технически сложнее контактных, но позволяют роботу выполнять задание с большей скоростью, заранее получать информацию о ближайших объектах и соответствующим образом корректировать свои действия. Сенсорные устройства дальнего действия дают информацию о внешней среде и объеме всей рабочей зоны робота.
Сенсорные устройства сверхдальнего действия применяют главным образом в мобильных роботах. К таким устройствам относятся различные навигационные устройства, координаторы, локаторы и другие оптические, радиотехнические и телевизионные системы.
В бесконтактных сенсорных системах роботов для получения требуемой информации могут быть использованы излучаемые таким устройством специальные сигналы (оптические, радиотехнические, радиационные и т.п.) или естественные излучения среды и отдельных ее объектов. В зависимости от этого различают активные и пассивные сенсорные системы. Первые обязательно включают передающие устройства, излучающие первичный сигнал, и приемные устройства, регистрирующие прямой сигнал, прошедший через среду, или вторичный сигнал, отраженный от объектов среды. Пассивные системы имеют только приемное устройство, а роль излучателя играют сами объекты внешней среды. Поэтому такие устройства технически обычно проще и дешевле, но зато и менее универсальны. Существуют также полуактивные сенсорные устройства, в которых в результате излучения внешней среды инициируется вторичное излучение ее объектов, принимаемое приемными устройствами, как в пассивных системах.
Таким образом, на основе классификации были выбраны следующие сенсоры для решения задач перемещения и локализации в пещерах, параллельно определяя тип опорной поверхности. Выбранными семействами сенсоров являются силомоментные, сверхдальнего действия, бесконтактные, а также датчики обратной связи.
Для решения задачи построения карты с помощью тактильного очувствления решено генерировать поверхность на основе полученных точек. Эта задача формулируется следующим образом. Необходимо получить оболочку из набора точек, полученных с лап робота. Одним из примеров оболочки является выпуклая оболочка. Выпуклая оболочка - это наименьшее выпуклое множество, содержащее в себе множество X. В формализации используется слово оболочка, так как эта поверхность проходима, а оболочка строится на основе облака точек, полученного с пройденной поверхности.
Для выбора алгоритма необходимо формализовать ограничения и условия, которые присутствуют в конкретной задаче по построению карты с помощью тактильного очувствления.
- Граница вокруг объекта должна быть вогнутой формы, а не выпуклой.
- Плотность полученного облака точек не играет роли.
Область интерполяции - это когда одна группа объектов или набор данных является базой для определения диапазона значений для интерполяции и заключена в некую границу выпуклой формы. Область за пределами этой границы или корпуса обозначается как область экстраполяции. Обычно эту область называют выпуклой оболочкой. В редких случаях авторы применяют определение экстраполяции к области между несколькими группами объектов. Пример использования метода кластеризации для определения новых точек данных в области экстраполяции для обнаружения повреждений при изменяющихся условиях окружающей среды и эксплуатации для мониторинга состояния конструкций.
Для решения задачи построения карты необходимо использовать алгоритмы, основанные на получении вогнутой оболочки. Чаще всего такие алгоритмы используют за основу выпуклую оболочку и модифицируют ее.
Зная область применения робототехнической системы возможно оптимизировать ее механическую часть. Были выдвинуты следующие требования к конструкции. Робототехническая система должна:
1. иметь малые габариты, чтобы иметь возможность пролезать через щели в скальной породе и не застревать среди камней;
2. обладать достаточной проходимостью по сыпучим грунтам;
3. иметь возможность преодолевать малые водные преграды;
4. уметь взбираться на большие каменные уступы.
В качестве примера был выбран многоногий шагающий робот с цельным или сочлененным корпусом, и цикловыми движителями с одной степенью свободы, управляемые зависимо или независимо друг от друга (фиг.1).
а) При увеличении количества ног увеличивается детализация картографируемой поверхности
б) При увеличении количества ног, корпус робота увеличивается, и он не может пройти часть препятствий
в) При изменении количества ног меняется проходимость системы.
Геометрическая модель корпуса робота представлена в виде параллелепипеда. Количество движителей по каждому из бортов обозначается через γ разность фаз между соседними движителями обозначается через ά (фиг.4).
Модель робота реализована в формате URDF. Это язык разметки формата XML для представления модели робота. Это старый формат, и когда модель загружается в Gazebo, URDF преобразуется в формат SDF. Это важно, потому что часть функций не реализованы в чистом URDF. В нашем случае это шарнир коробки передач.
Генерация семейства поверхностей является одним из способов решить задачу оценки сложности рельефа. Основными найденными подходами к оценке рельефа являются.
1. Анализ множества физических свойств поверхностей с точки зрения максимальной скорости, мощности и других параметров робота при их прохождении.
2. Построение конкретной местности, которая является достаточно сложной по мнению человека, который ее генерирует. В задании Rough Terrain Task в DARPA’s Virtual Robotics Challenge используется этот подход.
3. Оценка местности в соответствии с возможностями робота. Она основывается на перепаде высот, который может преодолеть робот.Если робот не может его преодолеть, значит, местность неудовлетворительная.
4. Оценка по карте с использованием ряда анализируемых параметров, таких как дисперсия, дальность, тип почвенно-растительного покрова, количество граней и так далее.
5. Получение искусственных поверхностей на основе параметров генерации. Первая версия этой идеи была связана с получением жестких ландшафтов с квадратной сеткой, где каждая ячейка имеет некоторую высоту.
Рассмотрев преимущества и недостатки всех вариантов, последний подход с некоторыми модификациями и расширениями лучше всего подходит для оценки сложности поверхности.
Таким образом, была разработана и исследована робототехническая система построения карты местности и определения геометрических и физических свойств опорной поверхности на базе многоногого шагающего аппарата с тактильным очувствлением без использования оптических сенсоров.
Данное решение подходит для первичного исследования замкнутых труднодоступных пространств, где отсутствует освещение, обилие грязи, пыли, а также водных препятствий. Алгоритмы и концепты навигации данной системы могут быть использованы как резервная система навигации для других робототехнических систем, когда главная система, которая является более точной, из-за природы использованных датчиков, вышла из строя.
Предложенное решение подходит для первичного изучения закрытых недоступных мест, где отсутствует освещение, много грязи, пыли, и водных преград.
Данное решение позволяет получить примерные габариты и устройство закрытых мест. Методы и концепты навигации предоставленной системы имеют все шансы быть применены как запасная система навигации для иных робототехнических систем, когда больше точная - оптическая вышла из строя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением четырехногого шагающего робота по пересеченной местности | 2023 |
|
RU2832498C1 |
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СИЛЫ И ТОЧКИ КОНТАКТА КОЛЛАБОРАТИВНОГО РОБОТА С ОКРУЖАЮЩЕЙ СРЕДОЙ | 2021 |
|
RU2780294C1 |
| АВТОНОМНЫЙ МОБИЛЬНЫЙ РОБОТ ДЛЯ СБОРА ДИКОРОСОВ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2009 |
|
RU2424892C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ В КИБЕРФИЗИЧЕСКИХ СИСТЕМАХ, ПРЕИМУЩЕСТВЕННО ДЛЯ УПРАВЛЕНИЯ МОБИЛЬНЫМИ РОБОТАМИ И/ИЛИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2013 |
|
RU2578759C2 |
| СПОСОБ УПРАВЛЕНИЯ МАШИНОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2337851C2 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
Изобретение относится к области робототехники, а именно к многоногим шагающим роботам с цикловыми движителями. Мобильный шагающий робот содержит корпус, перемещающийся при помощи ног робота. Корпус состоит из двух сегментов с одной активной степенью свободы, на котором размещены от 8 до 12 независимых педипуляторов. При этом в каждом сегменте размещено одинаковое количество педипуляров, которые выполнены в виде C-образных ног, приводимых в движение цикловым движителем с одной степенью свободы, на каждой из которых размещены проприоцептивные сенсоры, включающие акселерометр, гироскоп, датчики силы, на каждом цикловом движителе. Техническим результатом изобретения является тактильное очувствление шагающего робота, который подходит для первичного изучения закрытых недоступных мест, где отсутствует освещение, много грязи, пыли, и водных преград. 3 з.п. ф-лы, 6 ил.
1. Мобильный шагающий робот, содержащий корпус, перемещающийся при помощи ног робота, отличающийся тем, что корпус состоит из двух сегментов с одной активной степенью свободы, на котором размещены от 8 до 12 независимых педипуляторов, при этом в каждом сегменте размещено одинаковое количество педипуляров, которые выполнены в виде C-образных ног, приводимых в движение цикловым движителем с одной степенью свободы, на каждой из которых размещены проприоцептивные сенсоры, включающие акселерометр, гироскоп, датчики силы, на каждом цикловом движителе.
2. Мобильный шагающий робот по п.1, отличающийся тем, что датчики силы выполнены на основе преобразователя силы – пьезорезистивного датчика.
3. Мобильный шагающий робот по п.2, отличающийся тем, что преобразователь силы состоит из двух медных оболочек, разделенных слоем полимерной пленки, пропитанной сажей для придания ей электропроводности.
4. Мобильный шагающий робот по п.1, отличающийся тем, что блоком управления движения можно управлять вручную.
| CN 209938770 U, 14.01.2020 | |||
| РОБОТИЗИРОВАННОЕ УСТРОЙСТВО | 2022 |
|
RU2788754C1 |
| CN 105882339 B, 29.06.2018 | |||
| US 6481513 B2, 19.11.2002 | |||
| AU 2018101292 A4, 11.10.2018 | |||
| CN 110155203 B, 30.10.2020 | |||
| CN 110588818 A, 20.12.2019 | |||
| US 20120031218 A1, 09.02.2012 | |||
| CN 105835984 B, 05.03.2019. | |||

