Заявленное техническое решение относится к области космического машиностроения, в частности к средствам демонстрации и обучения, а именно к учебно-методическим комплексам для приобретения и отработки заинтересованными лицами практических навыков управления и контроля космическим аппаратом дистанционного зондирования Земли.
Известен мультимедийный учебно-методический комплекс с применением космических технологий (патент №103419, МПК G09B 5/00, G09B 9/00, опубл. 10.04.2011), которое содержит бумажный носитель информации, цифровой носитель информации, блок формирования и вывода мультимедийной космической информации, комплект оборудования для приема и обработки космических изображений Земли, комплект оборудования для регистрации информации о приходящей солнечной радиации, комплект оборудования спутниковой системы навигации Глонасс/GPS, пользователя учебно-методического комплекса (обучающийся). Блок формирования и вывода мультимедийной космической информации соединен с цифровым носителем информации, с комплектом оборудования для приема и обработки космических изображений Земли, с комплектом оборудования для регистрации информации о приходящей солнечной радиации и с комплектом оборудования спутниковой системы навигации Глонасс/GPS, бумажный носитель информации и блок формирования и вывода мультимедийной космической информации связаны с пользователем учебно-методического комплекса.
Недостатком данного технического решения является недостаточная практическая составляющая комплекса, не освещающая процесс получения снимков Земной поверхности различными космическими аппаратами, а также устаревшие данные мультимедийной космической информации.
Наиболее близким аналогом является комплекс наземной отработки ориентации и навигации космических аппаратов (КА), освещенная в способе наземной имитации полета космического аппарата в космосе (патент №2527632, МПК B64G 7/00, опубл. 10.09.2014 г.). Комплекс содержит интерфейс управления, систему визуализации, систему моделирования нештатных ситуаций, систему моделирования естественных (природных) помех, систему коммутации и связи, причем соединение типа Ethernet, MIL или RS, соединение типа Wi-Fi, внешние связи, внешние интерфейсы связи, систему моделирования полета КА в космическом пространстве, систему управления имитаторами, имитаторы звездного неба, имитаторы Солнца, имитаторы планет, в том числе Земли и Луны, динамический модуль, имитатор сигналов спутниковых навигационных систем. Через внешние связи комплекс наземной отработки систем ориентации и навигации КА связан с тестируемым КА, который состоит из системы управления ориентацией навигации, связанной с аппаратурой навигации и ориентации, а именно со звездными датчиками, гироскопами, солнечными датчиками, датчиками планет (в том числе Земли и Луны), приемниками Глонасс и/или GPS. Всем комплексом управляет оператор, или управление осуществляется автоматически.
Основным недостатком данного технического решения является то, что комплекс не позволяет имитировать работу целевой аппаратуры КА дистанционного зондирования Земли.
Задача, на решение которой направлено заявленное устройство, является создание наглядного интерактивного комплекса, позволяющего в доступной высокоинформативной форме представить процесс работы целевой аппаратуры КА дистанционного зондирования Земли.
Техническим результатом, достигаемым при использовании данного решения, является повышение качества представления информации путем расширения функциональных возможностей интерактивного учебно-методического комплекса за счет осуществления моделирования полного цикла работы целевой аппаратуры КА дистанционного зондирования Земли.
Указанный технический результат достигается за счет того, что интерактивный учебно-методический комплекс, имитирующий работу целевой аппаратуры космического аппарата (КА) дистанционного зондирования Земли, построенный на базе программно-аппаратной платформы и содержащий систему моделирования полета КА в космическом пространстве, имеет информационные связи между всеми компонентами комплекса, представленными подключенным к сети Wi-Fi портативным жидкокристаллическим устройством с программным обеспечением, также подключенным к сети Wi-Fi жидкокристаллическим устройством визуализации с микроконтроллером и панелью ручного управления, в котором содержится обновляемая информация с изображениями Земли из космического пространства различных спутников дистанционного зондирования Земли, и макетом космического аппарата с встроенной Wi-Fi камерой, закрепленным на орбитальных дугах с возможностью поворота корпуса в трех плоскостях с помощью электродвигателей, связанных с микроконтроллером, при этом портативное жидкокристаллическое устройство предусматривает вывод изображения интерфейса программного обеспечения, который содержит панель выбора КА, панель выбора параметров орбиты, панель выбора области съемки Земной поверхности, панель выбора пункта приема информации, панель с изображением карты мира с возможностью визуализации траектории движения подспутниковой точки заданного КА, панель визуализации текущих параметров моделирования полета КА, кнопку для запуска моделирования и кнопку для демонстрации результата моделирования.
Совокупность программной и аппаратной частей комплекса позволяет расширить функциональные возможности интерактивного учебно-методического комплекса за счет осуществления моделирования полного цикла работы целевой аппаратуры КА дистанционного зондирования Земли, тем самым позволяя повысить качество представления информации.
Техническая сущность предложенного технического решения поясняется следующими чертежами:
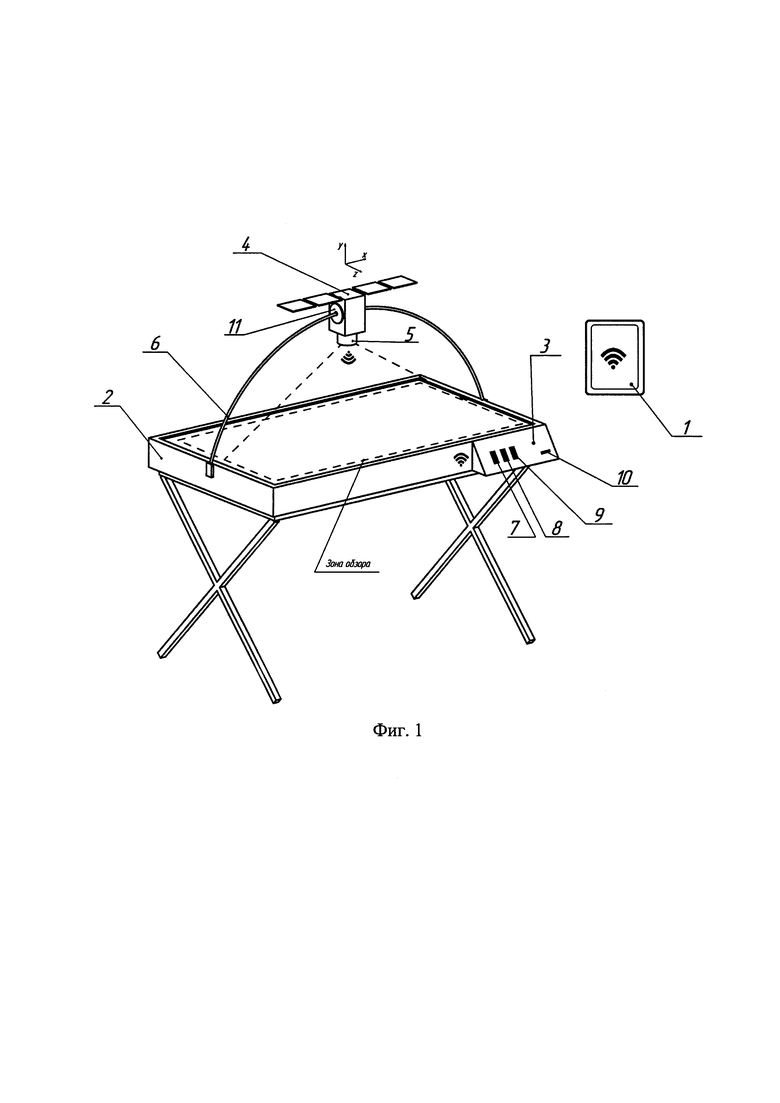
на фиг. 1 представлена схема интерактивного учебно-методического комплекса, имитирующего целевое функционирование космического аппарата дистанционного зондирования Земли;
на фиг. 2 изображен интерфейс программного обеспечения для функционирования учебно-методического комплекса.
Интерактивный учебно-методический комплекс представляет собой программно-аппаратную платформу, состоящую из подключенного к сети Wi-Fi портативного жидкокристаллического устройства (1) с программным обеспечением, также подключенного к сети Wi-Fi жидкокристаллического устройства визуализации (2) с микроконтроллером и панелью ручного управления (3), макета космического аппарата (4) со встроенной Wi-Fi камерой (5), закрепленного на орбитальных дугах (6) с возможностью поворота корпуса в трех плоскостях с помощью установленных там электродвигателей. Электродвигатели установлены внутри корпуса макета (4) и через провода, установленные внутри дуг (6), связаны с микроконтроллером устройства (2). Устройство визуализации (2) содержит обновляемую информацию с изображениями Земли из космического пространства различных спутников дистанционного зондирования Земли. Панель ручного управления (3) положением макета КА (4) содержит кнопку поворота вокруг оси X (7), кнопку поворота вокруг оси Y (8), кнопку поворота вокруг оси Z (9) и USB - порт (10) для обновления базы изображений в памяти микроконтроллера устройства (2). Повороты вокруг осей на величину хода электродвигателей позволяют осуществлять гибкие мембраны (11), установленные в местах крепления корпуса макета (4) с орбитальными дугами (6).
Устройство работает следующим образом.
Жидкокристаллические устройства (1,2) и камера (5) подключаются к общей сети Wi-Fi. Запускается программное обеспечение на портативном устройстве (2). Через интерфейс программного обеспечения производится настройка моделирования работы целевой аппаратуры какого-либо КА дистанционного зондирования Земли, характеристики которого находятся в общей базе, установленной в памяти устройств (1, 2). В памяти устройства (2) также находится база снимков поверхности Земли с этих аппаратов. В первую очередь, через соответствующие панели, производится выбор КА, затем выбор параметров орбиты, выбор области съемки и выбор пунктов приема информации. После всех настроек происходит формирование циклограмм работы КА и производится запуск работы комплекса. Во время выбора КА и выбора области съемки из памяти устройства (2) автоматически выгружаются соответствующие снимки данной области, полученные с этого аппарата, причем в зависимости от выбранной орбиты снимки форматируются в тот вид, в котором бы получила целевая аппаратура КА находясь на той или иной орбите. На экране портативного устройства (1) на панели с изображением карты мира появляется траектория движения выбранного КА, выделяется область съемки и появляется наземный пункт приема информации (НППИ). Также на панели визуализации текущих параметров моделирования полета КА высвечивается соответствующая информация, в частности информация о выбранном КА, его массе, высоте орбиты, наклонении орбиты, широте, долготе, дистанции от пункта приема до КА, разрешении целевой аппаратуры (ЦА) и полосе захвата ЦА. В то же время, по мере движения подспутниковой точки КА по траектории на экране портативного устройства (1), макет КА (4) производит соответствующие движения корпусом (ориентация солнечных батарей на Солнце, переориентация КА для съемки в надир), подобные производимым движениям КА в настоящем полете на орбите Земли. Таким образом макет КА имитирует целевое функционирование КА. При этом на экране (2) воспроизводятся области изображений из общей базы снимков, которые находятся в зоне обзора КА в данный момент. Когда КА достигает зону радиовидимости НППИ начинается прием информации и в память портативного устройства (1) загружаются соответствующие изображения необходимой области съемки. В случае, когда необходимо ускорить процесс моделирования нажимается кнопка «Результаты моделирования». На экране устройства (1) сразу появится информация о прошедшем моделировании и соответствующие изображения области съемки. Во время моделирования возможно установить связь с камерой (5) для того, чтобы транслировать на устройство (1) изображение с экрана устройства (2). Также с помощью панели (3) ручного управления путем нажатия соответствующих переключателей (7,8,9) возможно ручное регулирование положения макета КА (5). На панели (3) предусмотрен USB-порт для обновления базы изображений в памяти микроконтроллера устройства (2).
Пример работы комплекса.
С помощью панели выбора КА на интерфейсе программного обеспечения портативного устройства (1), подключенного к общей сети Wi-Fi, выбираем малый КА АИСТ-2Д массой 531 кг. со следующими характеристиками, представленными в таблице 1.
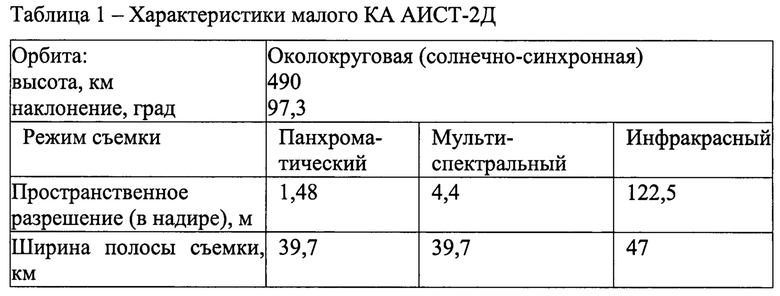
Параметры орбиты оставляем, как и у настоящего спутника. Выбираем в качестве области съемки город Самару. В качестве НППИ также принимаем пункт приема в городе Самара. Запускаем процесс моделирования. На панели визуализации появляется подспутниковая точка КА с траекторией движения, область съемки и пункт приема. Макет аппарата (4) начинает перестраиваться в режим съемки с помощью камеры (5), при этом на экране устройства (2) появляются снимки из базы, произведенные малым КА АИСТ-2Д, соответствующие траектории движения аппарата. После завершения съемки необходимой области или при нажатии кнопки «Результаты моделирования», на экране устройства (1) появляется информация о прошедшем моделировании и соответствующие изображения города Самары.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ ПРИЕМА И ОБРАБОТКИ ЗАЯВОК ОТ ВНЕШНИХ ПОТРЕБИТЕЛЕЙ НА ПРОВЕДЕНИЕ СПУТНИКОВОЙ СЪЕМКИ, КОМПЛЕКСНОЙ ОБРАБОТКИ СПУТНИКОВЫХ ДАННЫХ И ФОРМИРОВАНИЯ ВЫХОДНЫХ ИНФОРМАЦИОННЫХ ПРОДУКТОВ ДЛЯ ВНЕШНИХ ПОТРЕБИТЕЛЕЙ | 2011 |
|
RU2465617C1 |
| МЕЖДУНАРОДНАЯ АЭРОКОСМИЧЕСКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ГЛОБАЛЬНЫХ ГЕОФИЗИЧЕСКИХ ЯВЛЕНИЙ И ПРОГНОЗИРОВАНИЯ ПРИРОДНЫХ И ТЕХНОГЕННЫХ КАТАСТРОФ (МАКАСМ) | 2007 |
|
RU2349513C2 |
| Многофункциональный наземный комплекс управления, приема и обработки информации | 2024 |
|
RU2828016C1 |
| ИНТЕГРИРОВАННЫЙ УЧЕБНО-ТРЕНАЖЕРНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ ЭКИПАЖЕЙ РОССИЙСКИХ ПИЛОТИРУЕМЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2559872C1 |
| Комплексная система дистанционного обучения пилотированию летательных аппаратов | 2016 |
|
RU2647345C1 |
| КОСМОЦЕНТР | 2012 |
|
RU2505864C2 |
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ ОПТИКО-ЭЛЕКТРОННОЙ АППАРАТУРЫ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ | 2019 |
|
RU2730101C1 |
| Интегральная система дистанционного обучения пилотированию летательных аппаратов, комплексных испытаний и видеоконференцсвязи | 2018 |
|
RU2703325C1 |
| Способ оценки параметров движения подвижных объектов по результатам космической зональной съемки и аппаратура космической зональной съемки космического комплекса дистанционного зондирования Земли для осуществления способа | 2018 |
|
RU2696368C1 |

Изобретение относится к интерактивному учебно-методическому комплексу. Комплекс имитирует целевое функционирование космического аппарата (КА) дистанционного зондирования Земли. Комплекс построен на базе программно-аппаратной платформы и содержит систему моделирования полета КА в космическом пространстве. Система моделирования полета КА в космическом пространстве имеет информационные связи между всеми компонентами комплекса посредством сети WI-FI. Комплекс содержит: портативное жидкокристаллическое устройство с программным обеспечением, жидкокристаллическое устройство визуализации с микроконтроллером и панелью ручного управления, макет космического аппарата с встроенной Wi-Fi камерой. Жидкокристаллическое устройство визуализации содержит обновляемую информацию с изображениями Земли из космического пространства различных спутников дистанционного зондирования Земли. Макет КА закреплен на орбитальных дугах с возможностью поворота корпуса в трех плоскостях с помощью электродвигателей. Портативное жидкокристаллическое устройство предусматривает вывод изображения интерфейса программного обеспечения. Изображение интерфейса содержит: панель выбора КА, панель выбора параметров орбиты, панель выбора области съемки Земной поверхности, панель выбора пункта приема информации, панель с изображением карты мира, панель визуализации текущих параметров моделирования полета КА, кнопку для запуска моделирования и кнопку для демонстрации результата моделирования. Панель карты мира выполнена с возможностью визуализации траектории движения подспутниковой точки заданного КА. Достигается повышение качества представления информации за счет осуществления моделирования полного цикла работы целевой аппаратуры КА дистанционного зондирования Земли. 2 ил.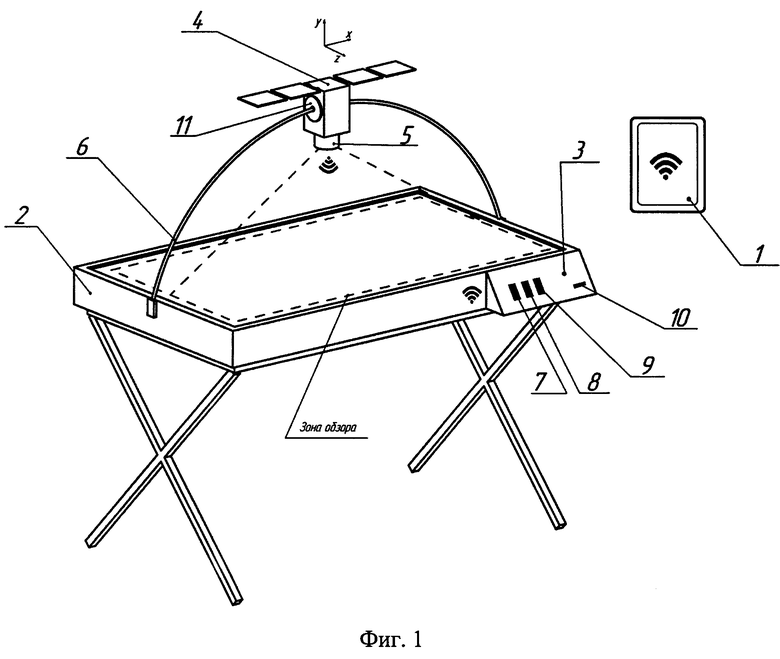
Интерактивный учебно-методический комплекс, имитирующий целевое функционирование космического аппарата (КА) дистанционного зондирования Земли, построенный на базе программно-аппаратной платформы и содержащий систему моделирования полета КА в космическом пространстве, отличающийся тем, что система моделирования полета КА в космическом пространстве имеет информационные связи между всеми компонентами комплекса, представленными подключенным к сети Wi-Fi портативным жидкокристаллическим устройством с программным обеспечением, также подключенным к сети Wi-Fi жидкокристаллическим устройством визуализации с микроконтроллером и панелью ручного управления, в котором содержится обновляемая информация с изображениями Земли из космического пространства различных спутников дистанционного зондирования Земли, и макетом космического аппарата с встроенной Wi-Fi камерой, закрепленным на орбитальных дугах с возможностью поворота корпуса в трех плоскостях с помощью электродвигателей, связанных с микроконтроллером, при этом портативное жидкокристаллическое устройство предусматривает вывод изображения интерфейса программного обеспечения, который содержит панель выбора КА, панель выбора параметров орбиты, панель выбора области съемки Земной поверхности, панель выбора пункта приема информации, панель с изображением карты мира с возможностью визуализации траектории движения подспутниковой точки заданного КА, панель визуализации текущих параметров моделирования полета КА, кнопку для запуска моделирования и кнопку для демонстрации результата моделирования.
| Трехходовой кран | 1955 |
|
SU103419A1 |
| СПОСОБ НАЗЕМНОЙ ИМИТАЦИИ ПОЛЕТА КОСМИЧЕСКИХ АППАРАТОВ В КОСМОСЕ | 2012 |
|
RU2527632C2 |
| СИМУЛЯТОР ПОЛЕТА КОСМИЧЕСКОГО КОРАБЛЯ | 2017 |
|
RU2653448C1 |
| Бильная мельница | 1960 |
|
SU136618A1 |
| Способ интерактивного обучения | 2015 |
|
RU2664946C1 |

