Изобретение относится к области точного приборостроения и может быть использовано при создании таких средств измерения угловой скорости движения основания, как вибрационные гироскопы.
Известны микромеханические вибрационные гироскопы (МВГ) [Soderkvist J. Micromachined gyroscopes. - Sensors and Actuators A, 43, 1994, pp. 65-71].
Принцип действия МВГ состоит в следующем. Инерционный диск, имеющий упругую связь с основанием, совершает первичные угловые колебания (угловые вибрации), создаваемые системой возбуждения, вокруг оси, перпендикулярной плоскости диска. Под воздействием угловой скорости основания вокруг оси чувствительности, направление которой лежит в плоскости диска, возникают силы Кориолиса, вызывающие выходные колебания инерционного диска вокруг ортогональной оси, лежащей в плоскости диска, измеряемые системой съема.
Основные проблемы при эксплуатации МВГ на подвижном основании заключаются в обеспечении устойчивости прибора к инерционным угловым и поступательным ускорениям высокой интенсивности, как постоянной, так и переменной амплитуды.
Известна конструкция МВГ [Лестев A.M., Попова И.В., Пятышев Е.Н. и др. Особенности комплексирования объемной микромеханики и БИС в измерительных системах. - Материалы X Санкт-Петербургской международной конференции по интегрированным системам, Санкт-Петербург, 2003. - С. 217-225], чувствительный элемент которого содержит основание и инерционный диск, закрепленный на основании с помощью внутреннего упругого подвеса (далее - упругий подвес). Инерционный диск и упругий подвес выполнены из кремниевой пластины одинаковой толщины. Внутренняя часть упругих элементов закреплена на основании, а наружная часть соединена с инерционным диском. Инерционный диск совершает первичные колебания вокруг оси, перпендикулярной плоскости диска. Колебания возбуждаются системой возбуждения первичных колебаний, состоящей из двигателей возбуждения и датчиков углового положения в виде гребенчатых структур. Измерение выходных колебаний инерционного диска осуществляется системой управления выходными колебаниями, состоящей из электродов емкостного съема (далее - электроды съема) и электродов управления, расположенных на основании под инерционным диском.
К недостаткам конструкции относится то, что при действии поступательных ускорений происходят деформации упругого подвеса и инерционного диска с соответствующим изменением зазора между инерционным диском и электродами емкостного съема. Это, в свою очередь, приводит к изменению масштабного коэффициента МВГ и к искажению его показаний. Вследствие нелинейного изменения зазора между электродами в системе управления выходными колебаниями при вибрации с высокой частотой и амплитудой возникают субгармонические резонансные колебания инерционного диска, приводящие к отказу МВГ [Евстифеев М.И. и др. Результаты испытаний микромеханических гироскопов при механических воздействиях. - Гироскопия и навигация, 2011, № 1, С. 49-58].
Известны технические решения [патенты США № 5635640 и № 8266961], позволяющие уменьшить влияние инерционных ускорений и, в частности, вибраций на показания МВГ путем использования в одном приборе нескольких инерционных дисков. Принцип работы таких приборов основан на том, что инерционные диски совершают противофазные угловые колебания в плоскости диска. При наличии угловой скорости возникают противофазные угловые колебания инерционных дисков вокруг осей, лежащих в плоскости дисков. Это позволяет использовать дифференциальный режим измерения и парировать действие вибраций, которые вызывают синфазные перемещения инерционных дисков. Конструкции могут содержать два, четыре или большее четное количество инерционных дисков. Однако, вследствие того, что инерционные диски расположены в одной плоскости, а электроды съема находятся на основании, происходят нелинейные изменения зазоров, вызывающие негативные эффекты в системе управления прибора и изменения масштабного коэффициента.
Известно решение [патент РФ № 2561006], в котором электроды съема и управления выходными колебаниями, расположенные под инерционным диском, размещены на подвижной площадке, закрепленной на основании соосно с диском с помощью собственного упругого подвеса. При таком расположении инерционного диска и подвижной площадки с электродами поступательные ускорения не приводят к изменению зазора вследствие равных синфазных деформаций подвесов инерционного диска и подвижной площадки. Равные деформации достигаются при равенстве собственных частот поступательных колебаний диска и площадки. Недостаток этого решения состоит в том, что эффективное подавление поступательных инерционных воздействий осуществляется, в основном, по оси, перпендикулярной плоскости диска, где сравнительно несложно обеспечивается равенство собственных частот, а по двум другим осям в плоскости диска обеспечение такого равенства вызывает конструктивные трудности. Кроме того, предложенная конструкция не обеспечивает неизменность зазора между инерционным диском и электродами емкостного съема в случае воздействия на прибор угловых ускорений и при изменении плоской формы инерционного диска вследствие его конечной жесткости [Евстифеев М.И., Елисеев Д.П. Оптимизация конструкции подвижного электрода микромеханического гироскопа RR-типа. - Гироскопия и навигация, 2017, том 25, № 2, с. 66-76].
В качестве прототипа по наибольшему числу общих существенных признаков принят МВГ [патент США №6443008], который содержит: основание; два соосно расположенных инерционных диска, совершающих противофазные угловые колебания вокруг оси, перпендикулярной плоскости диска; систему возбуждения первичных колебаний в виде гребенчатых двигателей; систему управления выходными колебаниями, состоящую из пары электродов емкостного съема и пары электродов управления. При наличии угловой скорости возникают противофазные угловые колебания инерционных дисков вокруг осей, лежащих в плоскости дисков, что позволяет использовать дифференциальный режим измерения. Устройство нечувствительно к воздействию угловых ускорений, так как оба диска при ускорениях поворачиваются синфазно относительно осей, расположенных в плоскости диска, зазор между каждым из дисков и основанием изменяется одинаково и при соответствующем замыкании обратных электрических связей системы управления не возникает выходного сигнала.
Недостаток прототипа обусловлен необходимостью измерения перемещений инерционных дисков относительно основания и особенно проявляется при действии поступательного ускорения по оси, перпендикулярной плоскости диска. В этом случае зазор между одним из дисков и основанием увеличивается, а зазор между другим диском и основанием уменьшается. Вследствие нелинейной зависимости электростатических сил от величины зазора (сила взаимодействия обратно пропорциональна квадрату величины зазора) система управления выходными колебаниями должна в реальном времени обеспечивать компенсацию изменений масштабного коэффициента, что в случае высокочастотной вибрации будет вызывать амплитудные и фазовые искажения формируемого коэффициента.
Решаемая техническая проблема - снижение чувствительности прибора к внешним инерционным как поступательным, так и угловым ускорениям и повышение эксплуатационных характеристик МВГ.
Достигаемый технический результат - создание МВГ, нечувствительного к внешним инерционным воздействиям и способного работать в жестких условиях эксплуатации.
Согласно изобретению, указанная задача решается тем, что в устройстве имеются два соосно расположенных инерционных диска, совершающих противофазные угловые колебания вокруг оси, перпендикулярной плоскости диска, а электроды системы управления выходными колебаниями (электроды съема и электроды управления) размещены на плоских поверхностях обоих инерционных дисков. Электроды, нанесенные на поверхности двух инерционных дисков, обращены друг к другу и образуют плоский конденсатор, который используется как емкостной датчик системы управления для измерения выходных колебаний. Собственные частоты как поступательных, так и угловых колебаний инерционных дисков в соответствующих упругих подвесах выбираются равными или, по крайней мере, близкими.
Вследствие воздействия поступательных и угловых ускорений основания происходят равные деформации упругих подвесов инерционных дисков, обеспечивая неизменность зазора между электродами системы управления выходными колебаниями. При этом вследствие законов механики амплитуды вынужденных колебаний обоих инерционных дисков с электродами под действием постоянного или вибрационного как поступательного, так и углового ускорений равны или близки (в зависимости от соотношения собственных частот колебаний инерционных дисков на упругих подвесах), а фазовые искажения исключены, так как колебания являются синфазными.
Неизменность зазора и отсутствие относительных перемещений электродов системы управления выходными колебаниями, которые расположены на дисках, обеспечивают постоянство масштабного коэффициента прибора и нечувствительность МВГ к поступательным и угловым ускорениям основания.
Сущность изобретения поясняется следующими чертежами: фиг. 1 - принципиальная схема устройства; фиг. 2 - иллюстрация неизменности зазора между дисками при различных условиях эксплуатации; фиг. 3 - разнесенный вид компоновки конструкции; фиг. 4 - сечение конструкции; фиг. 5 - общий вид инерционного диска.
На фиг. 1-5 введены следующие обозначения:
1 - ось первичных колебаний;
2 - ось чувствительности;
3 - ось выходных колебаний;
4 - инерционный диск (далее - диск 4), который крепится к опоре 8 с помощью упругого подвеса 6;
5 - инерционный диск (далее - диск 5), расположенный соосно диску 4 и закрепленный на опоре 9 с помощью упругого подвеса 7;
6 - упругий подвес инерционного диска 4;
7 - упругий подвес инерционного диска 5;
8 - опора упругого подвеса 6;
9 - опора упругого подвеса 7;
10 - электроды емкостного съема выходных колебаний на диске 5;
11 - электроды управления выходными колебаниями на диске 5;
12 - зазор между двумя инерционными дисками;
13 - основание, на котором закреплен инерционный диск 5;
14 - электроды на основании 13 для крепления диска 5 и передачи сигнала с контактов 17 на выходные контактные площадки 16;
15 - электроды на основании 13 для крепления гребенчатых двигателей возбуждения первичных колебаний 18 и датчиков углового положения 19, соединенные с выходными контактными площадками 16;
16 - выходные контактные площадки основания 13;
17 - контакты для передачи сигнала с электродов 10 и 11 диска 5 на основание 13;
18 - гребенчатые двигатели возбуждения первичных колебаний диска 5, закрепленные на электродах 15 основания 13;
19 - датчики углового положения диска 5 при первичных колебаниях, закрепленные на электродах 15 основания 13;
20 - гребенчатые двигатели возбуждения первичных колебаний диска 4, закрепленные на электродах основания 22;
21 - датчики углового положения диска 4 при первичных колебаниях, закрепленные на электродах основания 22;
22 - основание с выходными контактными площадками 23;
23 - выходные контактные площадки основания 22;
24 - контакты для передачи сигнала с электродов диска 4 на основания 22;
25 - технологическая пластина, в которой методами формообразования (например, травления) сформирован диск 4;
26 - технологическая пластина, в которой методами формообразования (например, травления) сформирован диск 5;
27 - зазор между инерционным диском 4 и основанием 22;
28 - зазор между инерционным диском 5 и основанием 13.
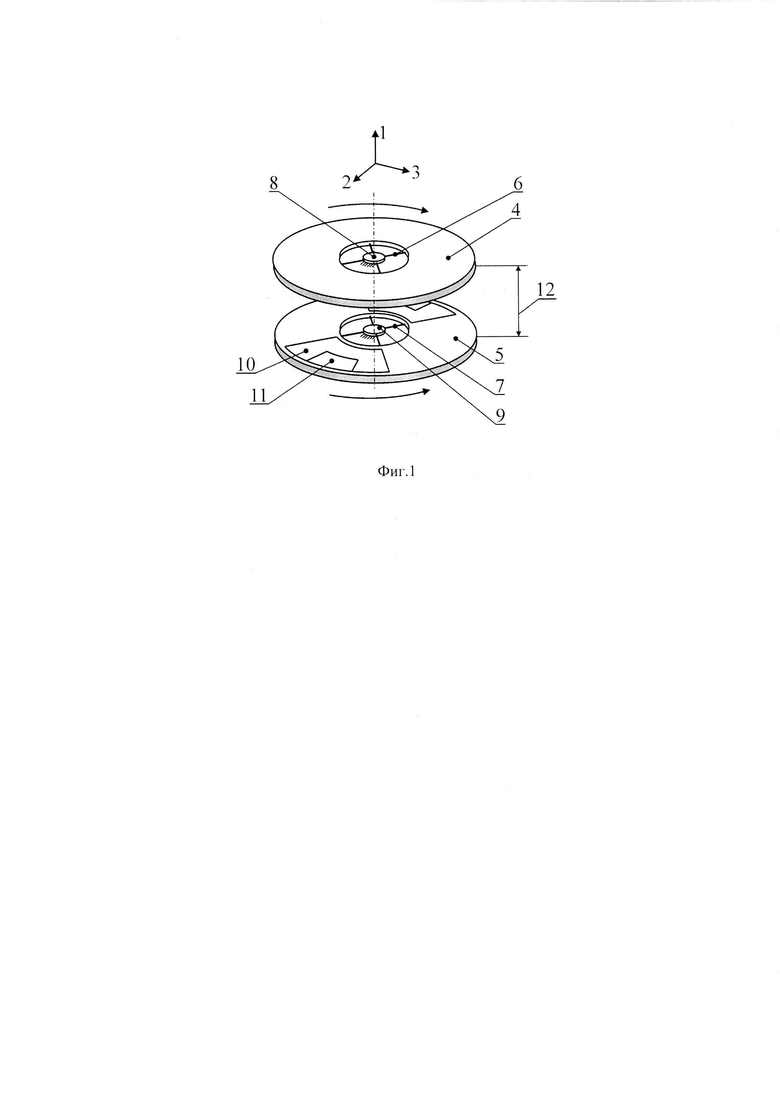
Принцип действия МВГ показан на фиг. 1 и 2. Инерционный диск 5 с упругим подвесом 7 через опору 9 неподвижно закреплен на основании. Второй инерционный диск 4 с упругим подвесом 6 расположен соосно диску 5 с зазором 12 и через опору 8 закреплен на основании. На поверхностях дисков 4 и 5, обращенных друг к другу, размещены электроды емкостного съема 10 и электроды управления 11, которые образуют плоские конденсаторы системы управления выходными колебаниями вокруг оси выходных колебаний 3.
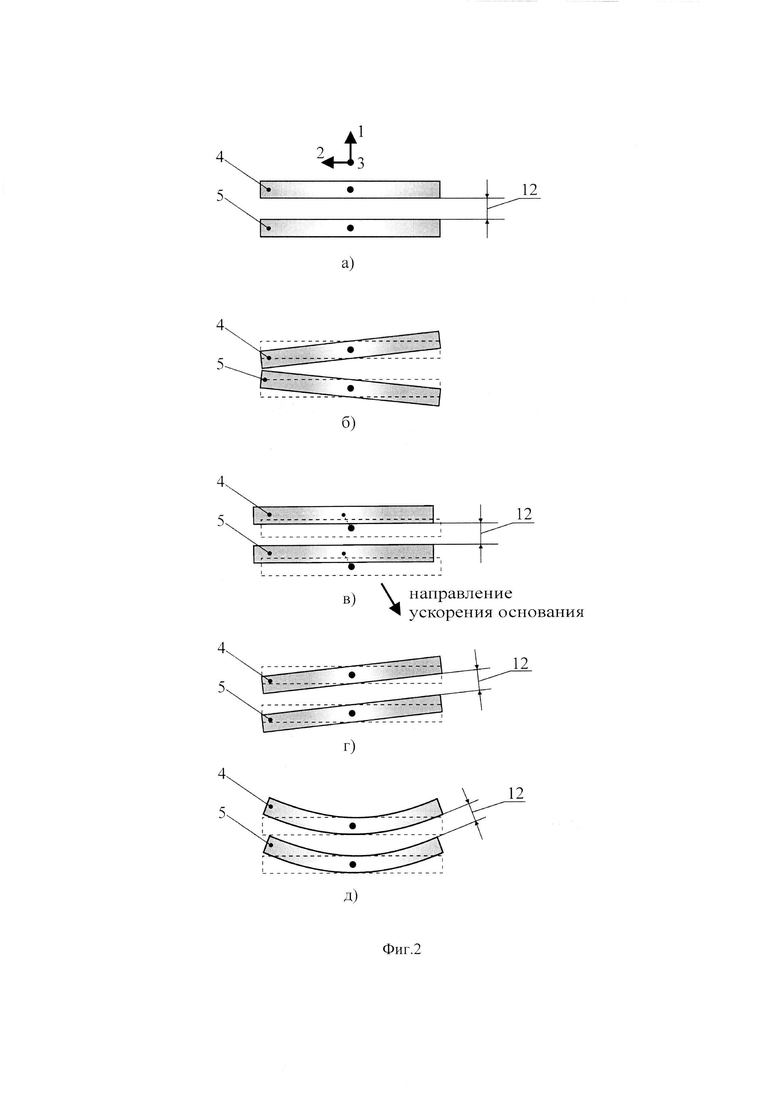
Диски совершают противофазные первичные угловые колебания вокруг оси первичных колебаний 1, при этом между ними сохраняется равномерный зазор 12 (на фиг. 2,а показан вид сбоку и точкой отмечен центр упругого подвеса). При воздействии угловой скорости основания, действующей по оси чувствительности 2, возникают силы инерции Кориолиса, заставляющие инерционные диски 4 и 5 колебаться относительно оси выходных колебаний 3, при этом измерение выходных колебаний осуществляется между поверхностями двух инерционных дисков. В силу того, что первичные колебания инерционных дисков 4 и 5 совершаются в противофазе, то и их выходные колебания, обусловленные силами инерции Кориолиса, так же будут совершаться в противоположных направлениях (на фиг. 2, б, пунктиром отмечено невозмущенное положение дисков). Это позволяет в системе управления выходными колебаниями использовать дифференциальный режим измерения амплитуды выходных колебаний, которая является мерой измеряемой угловой скорости.
В случае внешнего инерционного воздействия в виде поступательного постоянного или переменного ускорения (вибрации) происходят равные поступательные деформации упругих подвесов 6 и 7 инерционных дисков 4 и 5, обеспечивая неизменность зазора 12 между ними (фиг. 2, в). Вследствие законов механики амплитуды вынужденных колебаний инерционных дисков равны или близки (в зависимости от соотношения собственных частот колебаний инерционных дисков на упругих подвесах), а фазовые искажения исключены, так как колебания являются синфазными.
В случае внешнего инерционного воздействия в виде углового ускорения по законам механики происходят синфазные угловые колебания дисков 4 и 5 с равной амплитудой, при этом из-за малой величины углов колебаний зазор 12 остается практически неизменным (фиг. 2, г).
Одной из погрешностей МВГ является изменение плоской формы инерционного диска вследствие его конечной жесткости под воздействием значительных поступательных ускорений, например, ударов [Евстифеев М.И., Елисеев Д.П. Оптимизация конструкции подвижного электрода микромеханического гироскопа RR-типа // Гироскопия и навигация. - 2017. - том 25, № 2. - С. 66-76]. При таких деформациях зазор между инерционным диском и основанием становится неравномерным, что приводит к погрешности масштабного коэффициента гироскопа. Описываемое устройство лишено этого недостатка. Если частоты собственных колебаний обоих инерционных дисков равны или, по крайней мере, близки, то диски имеют равные деформации изгиба и зазор между ними остается неизменным (фиг. 2, д).
Отсутствие относительных перемещений дисков и неизменность зазора в датчиках системы управления выходными колебаниями обеспечивают постоянство масштабного коэффициента прибора и создают нечувствительность МВГ как к поступательным, так и к угловым ускорениям основания.
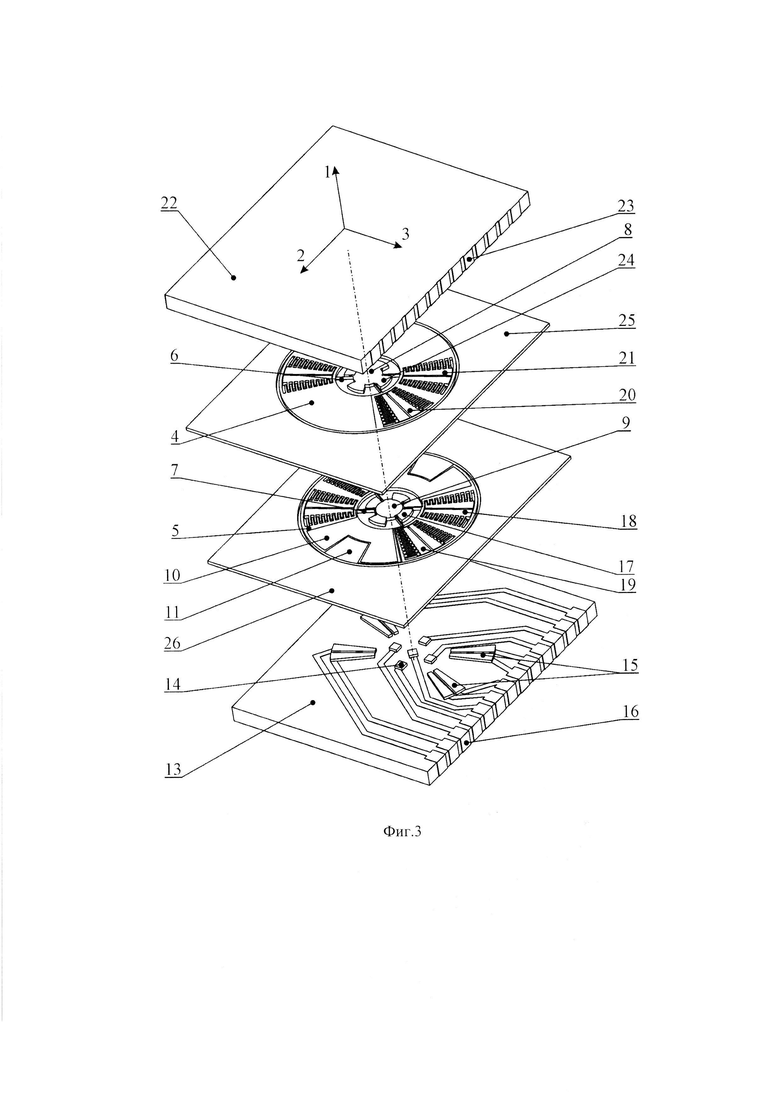
На фиг. 3, 4, 5 показан вариант конструктивного исполнения предлагаемого устройства. Устройство состоит из четырех пластин, две из которых представляют собой основания 13 и 22 с площадками для крепления дисков 4 и 5 и обеспечения передачи электрических сигналов на выходные контактные площадки 16 и 23. В двух других пластинах 25 и 26 одинаковой толщины сформированы инерционные диски 4 и 5 совместно с упругими подвесами 6 и 7, которые через опоры 8 и 9 соответственно закреплены на основаниях 13 и 22. В пластине 26 в прорезях инерционного диска 5 сформированы гребенчатые двигатели возбуждения первичных колебаний 18 и датчики углового положения диска при первичных колебаниях 19. Аналогичные двигатели 20 и датчики 21 сформированы в пластине 25 в прорезях диска 4. Как основания 13 и 22, так и пластины 25 и 26 с дисками 4 и 5 имеют соответственно одинаковую конструкцию. После соединения четырех пластин по внешнему контуру образуется общее основание, на котором через опоры 8 и 9 закреплены инерционные диски 4 и 5 с упругими подвесами 6 и 7. Это позволяет реализовать принципиальную схему устройства, показанного на фиг. 1.
На гребенчатые двигатели возбуждения 18 через электроды 15 основания 13, подается переменное электрическое напряжение с частотой, равной собственной частоте первичных колебаний, что обеспечивает колебания инерционного диска 5 вокруг оси первичных колебаний 1. Датчики углового положения 19, закрепленные на электродах 15 основания 13, служат для определения амплитуды колебаний и совместно с двигателями возбуждения 18 представляют собой систему возбуждения первичных колебаний инерционного диска 5.
Второй инерционный диск 4 с упругим подвесом 6 закреплен на основании 22. На гребенчатые двигатели возбуждения 20 через электроды на основании 22 (аналогичные электродам 15 на основании 13) подается переменное электрическое напряжение с частотой, равной собственной частоте первичных колебаний и фазой, отстающей на π (180°) от напряжения, подаваемого на двигатели 18. Это обеспечивает колебания инерционного диска 4 вокруг оси первичных колебаний 1 в противофазе с колебаниями инерционного диска 5. Датчики углового положения 21, закрепленные на электродах основания 22 (аналогичные электродам 15 на основании 13), служат для определения амплитуды колебаний и совместно с двигателями возбуждения 20 представляют собой систему возбуждения первичных колебаний второго инерционного диска 4.
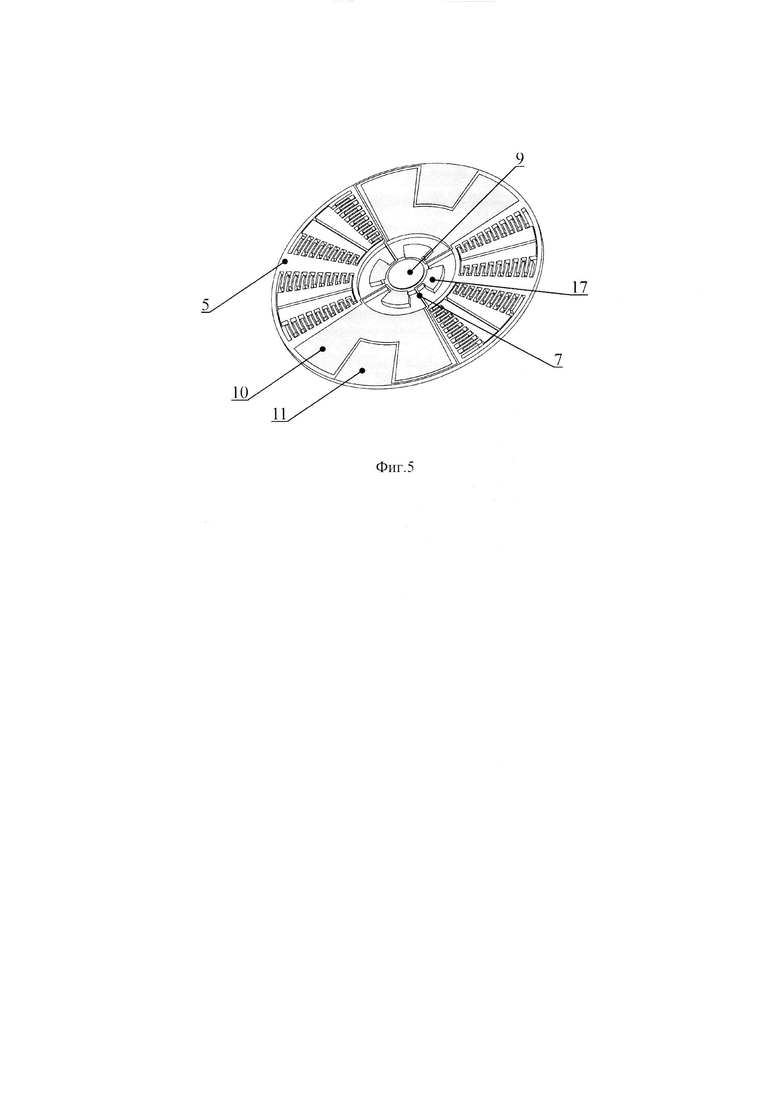
Электроды системы управления выходными колебаниями (электроды съема и электроды управления) размещены на плоских поверхностях инерционных дисков 4 и 5. Электроды 10 и 11, нанесенные на поверхность диска 5, через контактные дорожки, проходящие по упругим элементам подвеса 7, связаны с контактами 17, которые имеют электрическую связь с противоположной стороной и в свою очередь соединяются с электродами 14 основания 13. На фиг. 5 показан инерционный диск 5 без пластины 26. Аналогичная конструкция электродов системы управления выходными колебаниями выполнена на диске 4.
Управление рассматриваемого МВГ осуществляется через контактные площадки 16 на основании 13 и контактные площадки 23 на основании 22, которые электрически связаны с электродами системы возбуждения первичных колебаний и системы управления выходными колебаниями.
При действии углового и/или поступательного ускорения вдоль и/или вокруг любой из осей 1, 2, 3 упругие подвесы 6 и 7 инерционных дисков 4 и 5 деформируются в направлении действующего ускорения, при этом зазор 12 остается неизменным. Наличие зазоров 27 и 28 обеспечивает свободу перемещения инерционных дисков 4 и 5 вдоль оси 1 и вокруг осей 2 и 3 (фиг. 4).
Неизменность зазора 12 приводит к постоянству масштабного коэффициента гироскопа, что в свою очередь создает нечувствительность МВГ рассматриваемой конструкции к поступательным и угловым ускорениям основания.
Предлагаемая конструкция МВГ уменьшает зависимость масштабного коэффициента от изменений положения инерционного диска при деформации его упругого подвеса, позволяет эффективно уменьшить чувствительность прибора к воздействию инерционных перегрузок и достичь снижения влияния вибраций и постоянных ускорений основания на погрешность МВГ.
Технико-экономические преимущества изобретения по сравнению с базовым объектом, характеризующим существующий уровень техники и совпадающим в данном случае с прототипом, заключаются в уменьшении помех прибора от инерционных воздействий и повышении эксплуатационных характеристик МВГ.
В настоящее время разрабатывается техническая документация для МВГ данной конструкции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2014 |
|
RU2561006C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2004 |
|
RU2269746C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2289788C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296302C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2010 |
|
RU2485444C2 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО ДАТЧИКА | 2005 |
|
RU2296390C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2018 |
|
RU2686441C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП ВИБРАЦИОННОГО ТИПА | 2008 |
|
RU2370733C1 |
| Микромеханический гироскоп RR-типа | 2016 |
|
RU2626570C1 |

Изобретение относится к области точного приборостроения. Сущность изобретения заключается в том, что в микромеханическом вибрационном гироскопе измерение выходных угловых колебаний осуществляется между поверхностями двух инерционных дисков. Технический результат – снижение чувствительности гироскопа к постоянным и угловым ускорениям, повышение эксплуатационных характеристик гироскопа. 1 з.п. ф-лы, 5 ил.
1. Микромеханический вибрационный гироскоп, содержащий основание; два соосно расположенных инерционных диска, совершающих противофазные угловые колебания вокруг оси, перпендикулярной плоскости диска, имеющих одинаковую толщину и закрепленных на основании с помощью упругих подвесов; систему возбуждения первичных противофазных угловых колебаний дисков, состоящую из гребенчатых двигателей возбуждения и датчиков углового положения; систему управления выходными угловыми колебаниями, состоящую из электродов емкостного съема и электродов управления, отличающийся тем, измерение выходных угловых колебаний осуществляется между поверхностями двух инерционных дисков.
2. Микромеханический вибрационный гироскоп по п. 1, отличающийся тем, что собственные частоты поступательных и угловых колебаний двух инерционных дисков на соответствующих упругих подвесах равны.
| US 6443008 B1, 03.09.2002 | |||
| Елисеев Д.П | |||
| "Повышение виброустойчивости микромеханического гироскопа RR-типа" | |||
| Автореферат диссертации на соискание ученой степени кандидата технических наук | |||
| Санкт-Петербург, 2015 | |||
| Евстифеев М.И | |||
| и др | |||
| "Исследование динамики микромеханического гироскопа при механических воздействиях" | |||
| Научно-технический вестник |

