Изобретение относится к области точного приборостроения, в частности к вибрационным микромеханическим гироскопам (ММГ) RR-типа, измеряющим угловую скорость.
В этих ММГ подвижная масса (ПМ) подвешена к опоре, электроды, расположенные по разным осям подвеса ПМ, обеспечивают измерение перемещений ПМ и формирование сил (моментов) для управления движениями ПМ, в том числе формирование колебаний ПМ по оси первичных колебаний и измерение перемещений ПМ по оси вторичных колебаний.
Подробно работа вибрационных ММГ описана в литературе [1, 2]. В работе [2, с. 93] описана природа одной из основных помех в ММГ, называемой квадратурной помехой.
Для подавления квадратурной помехи в ММГ применяются электродные структуры, содержащие специальные, так называемые квадратурные электроды.
Разные варианты выполнения квадратурных электродов в ММГ приведены в патентах и статьях [3-8].
Для подавления квадратурной помехи методом компенсации сил, вызывающих этот тип помехи, в ММГ используют сложную электродную структуру и вводят дополнительные источники напряжения, которые определенным образом подключают к электродам. Например, в [3] на фиг. 7, 13, 9 показано, как за счет изменения напряжений на электродах, расположенных по оси вторичных колебаний, можно добиться снижения квадратурной помехи в ММГ LL-типа.
Электродная структура двухосного ММГ RR-типа приведена на фиг. 20 [4]. Показано, что подвижный электрод, имеющий форму диска, образованного двумя концентрическими окружностями, дополнен прямоугольными областями (элементы 340 а, b, с, d), а группа неподвижных электродов дополнена прямоугольными площадками (элементы 390) под этими элементами. При вибрации ПМ вокруг оси первичных колебаний изменяется площадь перекрытия элементами 340 элементов 390. При наличии разных напряжений на близко расположенных элементах 390 (например, элементы 390 а’, 390 b’) вибрация ПМ вызывает появление момента, который при определенных величинах напряжений может полностью подавить квадратурную помеху.
В [5] электроды крышки включают в себя пару дополнительных электродов, расположенных над отверстиями в роторе симметрично относительно середины отверстий, при этом часть площади этой пары электродов расположена над отверстием, и в микромеханический гироскоп введены источники напряжения, с которыми соединены электроды крышки, расположенные в зоне отверстий.
В [6] описан 4-массовый ММГ с квадратурными электродами, расположенными над зубцовыми зонами (аналогично тому, как квадратурные электроды расположены в одномассовом ММГ, описанном в [3]) каждой из четырех ПМ.
Принципы подавления квадратуры в двухмассовом ММГ LL-типа подробно описаны в работе [7]. В этом ММГ подавление квадратурной помехи достигается за счет подключения источника или источников постоянного тока к одной или двум группам электродов с последующим изменением их напряжения до полного подавления квадратурной помехи.
Недостатками описанных выше устройств является то, что при действии ускорений и вибраций вдоль оси вторичных колебаний начальный зазор (d0) между ПМ и квадратурными электродами изменяется. Создаваемые квадратурными электродами силы или моменты изменяются пропорционально величине  . Как видно из выражения (26) работы [7] при постоянной величине напряжений на квадратурных электродах изменение величины зазора приводит к неполной компенсации квадратурной помехи.
. Как видно из выражения (26) работы [7] при постоянной величине напряжений на квадратурных электродах изменение величины зазора приводит к неполной компенсации квадратурной помехи.
В качестве прототипа предложенного устройства выбран ММГ, описанный в работе [5].
Этот ММГ содержит опору на основании, к которой на резонансном подвесе подвешена проводящая ПМ. ПМ является подвижным электродом, а неподвижные электроды нанесены на крышку ММГ, которая крепится к основанию. ММГ содержит гребенчатую электродную структуру, образованную зубцами статоров, установленных на основание, и зубцами ПМ, при этом одна часть этой электродной структуры выполняет функцию гребенчатого двигателя, а вторая часть выполняет функцию емкостного датчика перемещения ПМ вокруг оси, перпендикулярной к основанию. Между этим емкостным датчиком и гребенчатым двигателем включено устройство возбуждения первичных колебаний ПМ. Электроды на крышке включают в себя квадратурные электроды, которые расположены частично над зубцовой зоной ПМ. С электродами, расположенными диаметрально над внезубцовой зоной ПМ, соединены входы 2-х преобразователей емкость-напряжение (код), выходы которых через дифференциальный усилитель соединены с демодулятором, а с квадратурными электродами соединены источники напряжения. При настройке ММГ это напряжение подстраивается так, чтобы остаточный сигнал на выходе дифференциального усилителя был бы минимальным. Пример процедуры настройки напряжения на квадратурных электродах, позволяющей подавить квадратурную помеху на 2-3 порядка до уровня меньше 1%, дан в работе [8].
Недостатком прототипа, как уже отмечалось выше, является то, что при работе в жестких условиях при больших уровнях ускорений и вибраций изменение зазора между ПМ и электродами крышки приводит к неполной компенсации квадратурной помехи и ухудшению точности ММГ. Например, при квадратурной помехе 1000% и 5% изменением зазора под действием ускорений и вибраций не скомпенсированный квадратурный сигнал может доходить до 100%.
Задачей изобретения является уменьшение влияния изменений зазора на степень подавления квадратурной помехи квадратурными электродами.
Достигаемый технический результат - повышение точности ММГ за счет сохранения высокого уровня подавления квадратурной помехи при работе ММГ в жестких условиях.
Поставленная задача решается тем, что в ММГ с квадратурными электродами и источниками напряжения, соединенными с ними, введены последовательно сумматор и делитель, обеспечивающие компенсацию изменений зазора, и источники напряжения выполнены управляемыми, при этом вход их управления соединен с выходом делителя.
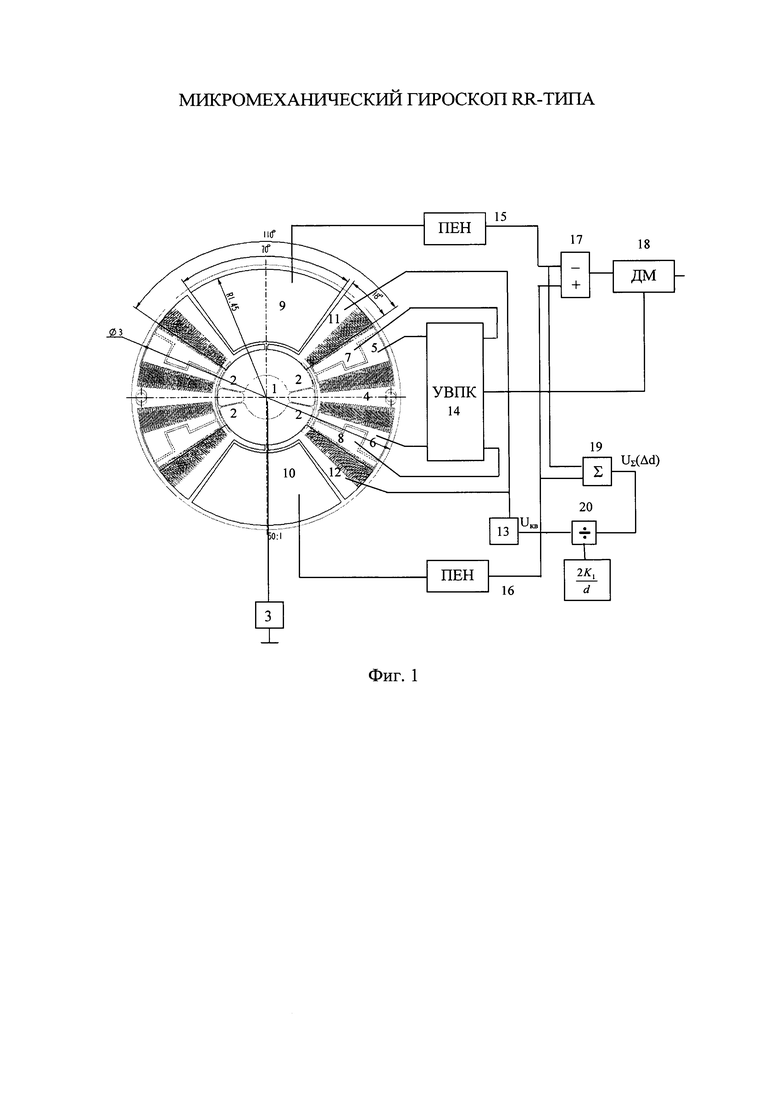
На фиг. 1 приведена схема предлагаемого ММГ. На фиг. 1 приняты следующие обозначения:
1 - основание, на которое подвешена ПМ;
2 - упругий подвес;
3 - источник переменного напряжения, подаваемого на ПМ;
4 - ПМ;
5, 6 - неподвижные электроды гребенчатого двигателя, отвечающие за управление первичными колебаниями;
7, 8 - неподвижные электроды гребенчатого двигателя, возбуждающие первичные колебания;
9, 10 - неподвижные электроды датчика угла, расположенные на крышке ММГ над ПМ (далее - измерительные электроды);
11, 12 - неподвижные электроды датчика момента, расположенные на крышке ММГ частично над зубцовой зоной ПМ (далее квадратурные электроды);
13 - усилитель, выполняющий функцию управляемого источника напряжения;
14 - устройство возбуждения первичных колебаний (УВПК);
15, 16 - преобразователи емкость-напряжение;
17 - дифференциальный усилитель;
18 - демодулятор;
19 - сумматор;
20 - делитель с коэффициентом, обратно пропорциональным номинальному зазору между ПМ и электродами, расположенными на крышке ММГ (далее - делитель).
Uкв - напряжение на выходе блока 20.
С преобразователей емкость-напряжение 15, 16 сигналы вида (1) поступают на дифференциальный усилитель 17 и сумматор 19.

где αК - угол поворота ПМ вокруг оси вторичных колебаний под действием сил Кориолиса и квадратурной помехи; КПЕН - коэффициент преобразователя емкость-напряжение, ε - диэлектрическая проницаемость среды (в вакууме ε=1); ε0 - диэлектрическая постоянная; S1 - площадь электродов съема данных 9, 10, d - номинальный зазор между ПМ и неподвижными электродами на крышке, Δd - изменение зазора под действием вибрации, R - радиус ПМ.
После дифференциального усилителя 17 сигнал, пропорциональный ускорению Кориолиса, поступает на демодулятор 18.
На выходе сумматора 19 при том, что величина RsinαK<<(d+Δd), получим сигнал вида (2), обратно пропорциональный изменению зазора Δd.

Далее сигнал через делитель 20, числителем которого является сигнал с выхода суммирующего устройства 19, а знаменателем - постоянная, обратно пропорциональная номинальному зазору d, подается на усилитель 13, выполняющий функцию управляемого источника напряжения, и далее на квадратурные электроды 11 и 12.
На выходе делителя 20 получим сигнал вида (3):

где U0 - постоянное напряжение, К1 - коэффициент пропорциональности, К2 - коэффициент пропорциональности, равный  .
.
Тогда сила, подаваемая на электроды 11 и 12, при коэффициенте усиления усилителя 13, равном К13, будет равна:

Из выражения (4) видно, что сила, создаваемая на электродах 11 и 12, не зависит от изменения зазора Δd. Таким образом, напряжением, пропорциональным изменению зазора, можно более эффективно подавлять квадратурную помеху в рассматриваемом ММГ за счет компенсации изменения зазора.
Отметим, что вместо одного усилителя 13 в данной конструкции ММГ без изменения сущности работы и достигаемого эффекта можно использовать два идентичных усилителя, входы которых соединены с блоком 20, а выходы - с одним из квадратурных электродов. В случае использования нескольких квадратурных электродов в конструкции ММГ число управляемых источников напряжения может быть равно числу квадратурных электродов. При этом их входы должны быть соединены с выходом блока 20.
Достижение технического результата подтверждено математическим моделированием.
Литература
1. В.Я. Распопов. Микромеханические приборы.//Учебное пособие. Тул. гос. университет, Тула, 2002 г., 392 с.
2. Cenk Acar, Andrei Shkel. MEMS Vibratory Gyroscopes Structural Approaches to Improve Robustness. // Springer Science + Business Media, LLC, 2009, 256 c.
3. Патент США №5992233.
4. Патент США №6067858.
5. Патент РФ №2320962.
6. Патент РФ №2344374.
7. Патент США №8701459.
8. Sharma A. CMOS Systems and circuits for sub-degree per hour MEMS gyroscopes / Ajit Sharma // Georgia Institute of Technology. Ph.D. Dissertation. - 2007. - 164 p.
Изобретение относится к микромеханическим гироскопам (ММГ) вибрационного типа. Сущность изобретения заключается в том, что в ММГ с квадратурными электродами и источниками напряжения, соединенными с ними, введены последовательно сумматор и делитель, обеспечивающие компенсацию изменений зазора, и источники напряжения выполнены управляемыми, при этом вход их управления соединен с выходом делителя. Технический результат - повышение точности ММГ. 1 ил.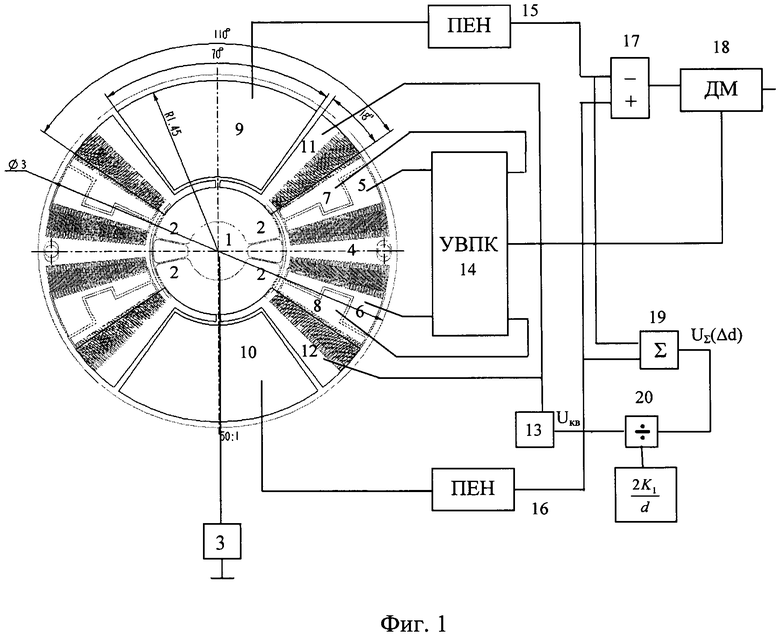
Микромеханический гироскоп RR-типа, содержащий опору на основании, к которой на резонансном подвесе подвешена проводящая подвижная масса (ПМ), электроды, расположенные на крышке, включающие в себя квадратурные и диаметрально расположенные измерительные электроды, гребенчатую электродную структуру, содержащую установленные на основании статоры с зубцами, на основе которой сформированы гребенчатый двигатель и датчик перемещения ПМ вокруг оси первичных колебаний, устройство возбуждения первичных колебаний, вход которого соединен с выходом датчика перемещения, а выход с входом гребенчатого двигателя, последовательно соединенные преобразователи емкость-напряжение, входы которых соединены с диаметрально расположенными измерительными электродами, и демодулятор, вход для опорного сигнала которого соединен с выходом устройства возбуждения первичных колебаний, источники переменного напряжения, соединенные с квадратурными электродами, отличающийся тем, что источники переменного напряжения выполнены управляемыми, в ММГ между ПМ и электродами, расположенными на крышке, введены сумматор и делитель, выход которого соединен с входами для управления источниками переменного напряжения.
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП НА ЕЕ ОСНОВЕ | 2006 |
|
RU2320962C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2010 |
|
RU2447403C1 |
| US 5889208 A1, 30.03.1999. | |||

