Изобретение относится к области навигационной техники, а именно к конструкции микромеханических вибрационных гироскопов.
Известны (патент США №6505511 В1 от 14 января 2003) вибрационный гироскоп LL типа, являющийся аналогом изобретения. Он представляет собой плоскую конструкцию и содержит инерционную массу, подвешенную посредством упругого подвеса с плоскими балками и якорей в корпусе. В состав гироскопа входят гребенчатые емкостные датчики момента, возбуждающие поступательные колебания инерционной массы вдоль оси возбуждения, и емкостные гребенчатые датчики перемещения инерционной массы вдоль оси, перекрестной к оси возбуждения. Гироскоп предназначается для измерения угловой скорости, нормальной к плоскости конструкции и не способен измерять угловые скорости вокруг осей, лежащих в плоскости конструкции.
Известен (патент РФ №2085848 С1, кл. 6 G01C 19/56. 27.07.97) вибрационный гироскоп RR типа, являющийся аналогом изобретения. Он содержит плоский маятник с симметрично относительно его плоскости укрепленными на нем двумя грузами. Маятник посредством упругого подвеса по одной лежащей в плоскости маятника оси укреплен в плоской рамке, которая в свою очередь по оси, лежащей в плоскости маятника и нормальной первой, укреплена с помощью упругого подвеса и якорей в корпусе гироскопа. На поверхности корпуса, отделенной от маятника равномерным зазором, размещены электроды емкостного датчика момента - возбудителя колебаний маятника, емкостного датчика угла поворота маятника вокруг оси, нормальной оси возбуждения, и в случае компенсационного прибора - электроды емкостного датчика момента обратной связи. В качестве подвижного электрода служит сам маятник, выполненный из электропроводящего материала (монокристаллического кремния). Гироскоп предназначается для измерения угловой скорости, направленной вдоль оси, нормальной плоскости маятника.
Известны (патент USA №6,067,858, 2000) микромеханические вибрационные гироскопы RR типа, содержащие крутильный маятник, в состав которого входят осесимметричный диск с центральным элементом крепления (якорем) и упругим подвесом, связывающим диск с якорем. Упругий подвес с плоскими балками обеспечивает диску возможность совершать колебания вокруг оси симметрии (ось возбуждения) и вокруг нормальных к ней осей (выходные оси). Крутильный маятник посредством якоря укреплен в изолированном корпусе таким образом, что между его торцом и поверхностью корпуса образован равномерный зазор. На поверхности изолированного корпуса, обращенной к диску, выполнены электроды емкостного датчика, обеспечивающего измерение углов поворота диска вокруг выходных осей. Подвижным электродом датчика служит диск, выполненный из электропроводящего материала (монокристаллического кремния). В конструкцию гироскопа входит емкостной датчик момента гребенчатого типа, возбуждающий крутильные колебания диска и емкостные компенсационные датчики момента, включенные в цепи обратной связи гироскопа и обеспечивающие компенсацию моментов кориолисовых сил, действующих по выходным осям гироскопа при измерении им угловой скорости корпуса.
Гироскоп содержит генератор сигнала возбуждения и систему регулировки крутильных колебаний маятника, обеспечивающие настройку колебаний маятника на его резонансную частоту и стабилизацию амплитуды крутильных колебаний маятника, а также усилители сигнала обратной связи, входы которых связаны с электродами емкостного датчика угла, а выходы - с компенсационными датчиками момента. Помимо этого в состав гироскопа входят системы компенсации квадратурных сигналов гироскопа. Данный гироскоп в зависимости от конструктивного исполнения способен измерять либо одну составляющую угловой скорости, ориентированную по оси, нормальной его выходной оси и оси возбуждения (однокомпонентный RR гироскоп), либо две составляющие угловой скорости, ориентированные по выходным осям (двухкомпоиентный RR гироскоп).
Данный гироскоп выбран в качестве прототипа изобретения.
Недостатком прототипа является использование в нем емкостных датчиков момента, не способных развивать большие уровни моментов. Для получения достаточных для нормальной работы амплитуд крутильных колебаний маятника приходится делать очень малые величины зазоров между электродами в гребенчатых датчиках момента возбуждения, а также обеспечивать высокую добротность колебательных систем гироскопа, что создает технологические трудности при изготовлении гироскопа и требует его вакуумирования. Кроме того, следует учитывать, что в емкостных компенсационных датчиках имеет место нелинейная зависимость развиваемого ими момента от величины управляющего напряжения на электродах. Это требует принятия специальных мер по линеаризации характеристик датчика. Еще одним недостатком прототипа является невозможность изменения квадратурного сигнала гироскопа путем регулировки его элементов в процессе изготовления и сборки гироскопа.
С целью устранения указанных недостатков прототипа предложена конструкция вибрационного RR гироскопа. В состав гироскопа входят изолированный окислом кремниевый крутильный маятник, показанный на фиг.1. Он содержит установочную платину 1 с контактными площадками от 2 до 9. Установочная пластина посредством упругого подвеса, образованного спиральными балками 11, 12, 13, 14, соединена с диском маятника 10. На диске размещены печатная обмотка датчика момента возбуждения 21 и две печатные обмотки 22 и 23 компенсационных датчиков момента. На поверхностях упругих балок размещены печатные токоподводы с 15 по 20. Части обмоток, размещенные на обеих сторонах диска, соединены через отверстия 24, 25, 26, 27, 28 в диске 10. Контактные площадки 3 и 6 размещены на участках установочной пластины 1, свободных от изолирующего покрытия, и имеют электрический контакт с телом маятника. В теле маятника выполнены окна 29, 30, 31, 32 и центральное базирующее отверстие 33. Крутильный маятник гироскопа целесообразно изготавливать из пластины монокристаллического кремния с плоскостью среза (001) методом анизотропного травления. При этом упругий подвес целесообразно выполнять в виде 4-х спиралей с прямолинейными участками, ориентированным по кристаллографическим направлениям <100> и <010>, как показано на фиг.1.
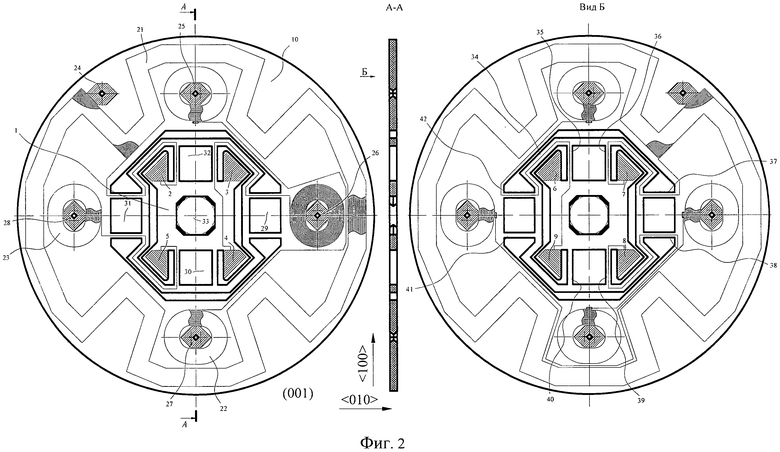
Имеется возможность использования и других типов подвесов. На фиг.2 показана конструкция крутильного маятника, в котором установочная пластина 1 связана с диском 10 через упругий подвес, содержащий дополнительно вводимую рамку 34 и растяжки с 35 по 42. В этой конструкции путем изменения размеров окон 29, 30, 31, 32 можно обеспечить совпадение частоты крутильных колебаний маятника и частот его колебаний вокруг выходных осей (резонансная настройка маятника).
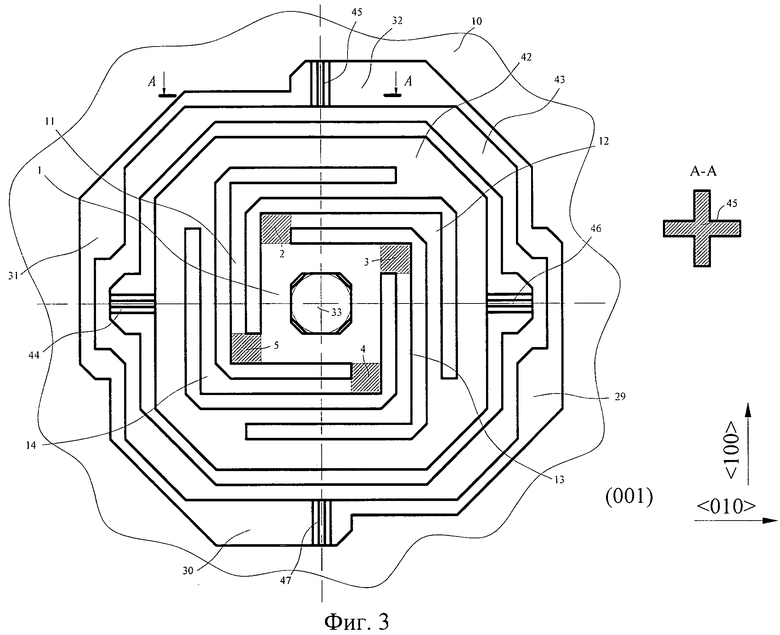
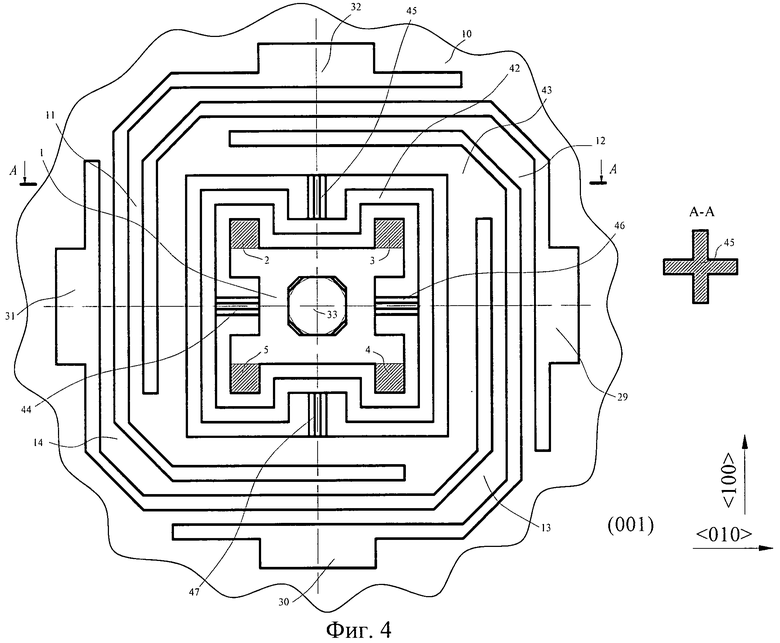
На фиг.3 и 4 показаны конструкции упругого подвеса крутильного маятника, в которых диск маятника 10 и установочная площадка 1 связаны через спирали упругого подвеса 11, 12, 13, 14, две дополнительно вводимые рамки 42 и 43 и четыре растяжки 44, 45, 46, 47, попарно ориентированные по кристаллографическим направляющим <100> и <010>. Растяжки в приведенных конструкциях имеют крестообразное сечение. Обмотки возбуждения, обмотка компенсационного моментного датчика и токоподводы, проходящие по поверхностям спиральных балок, растяжек, диска и установочной пластины, на чертежах фиг.3, 4 условно не показаны. В данных конструкциях обеспечивается независимый выбор частоты крутильных колебаний маятника и частот колебаний маятника вокруг выходных осей. В конструкциях, показанных на фиг.2, 3, 4, растяжки ориентированы по кристаллографическим направлениям <100> и <010>.
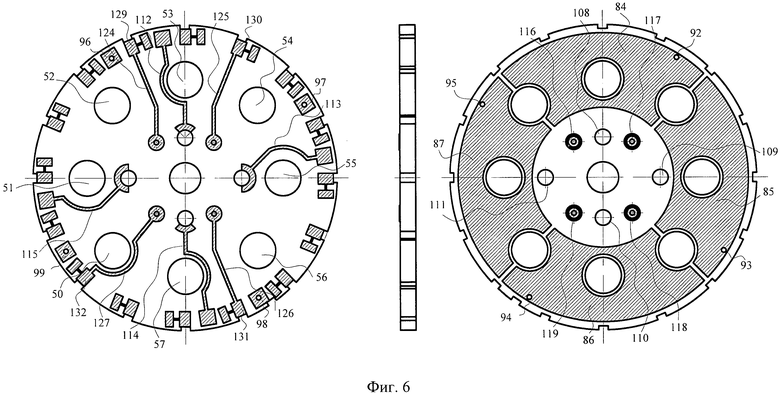
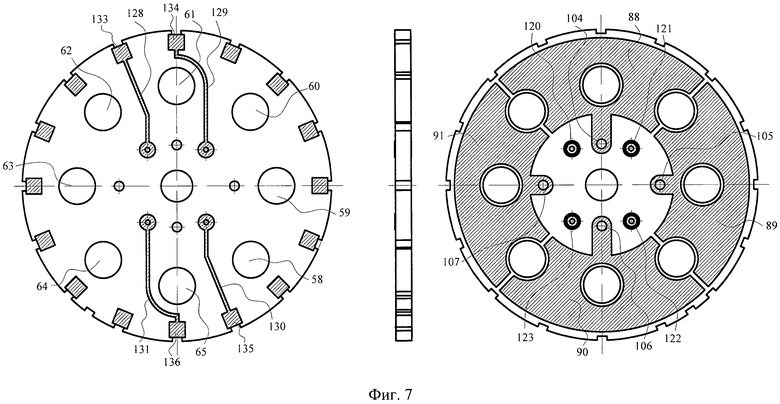
Крутильный маятник помещен между торцами двух изолированных корпусов: первого - 48 и второго - 49 (см. фиг.5). Конструкции первого и второго корпусов показаны на фиг.6 и фиг.7. В корпусах выполнены отверстия с 50 по 57 и с 58 по 65 для установки постоянных магнитов. При соединении корпусов с маятником корпуса ориентированы таким образом, чтобы их четные отверстия были расположены над участками радиально ориентированных частей обмоток возбуждения, а нечетные - над спиральными обмотками компенсационных датчиков момента.
В четные отверстия корпусов вставлены постоянные магниты 66, 68, 70, 72 и 74, 76, 78, 80, имеющие обращенные к маятнику разноименные и попарно чередующиеся полюса (например, в отверстии 50 у магнита 80 северный полюс направлен к маятнику, а в отверстии 58 у магнита 66 - от маятника, в отверстии 52 у магнита 74 - от маятника, а в отверстии 60 у магнита 68 - к маятнику, и так далее). В нечетные отверстия вставлены постоянные магниты с 67 по 81, имеющие обращенные к маятнику одноименные и попарно чередующиеся полюса (например, в отверстиях 51 и 59 к маятнику обращены северные полюса магнитов 67, 81, а в отверстиях 53 и 61 - полюса магнитов 69 и 75 южные и т.д.). Имеется возможность реализовать другие варианты намагничивания магнитов. При других вариантах намагничивания магнитов с ними должны быть согласованы направления токов в катушках компенсационного датчика момента и конфигурация катушки датчика момента возбуждения.
При всех вариантах радиально ориентированные участки обмотки возбуждения 21 оказываются в магнитных полях, ориентированных нормально к торцевым поверхностям диска 10, а спиралевидные обмотки компенсационных датчиков момента 22, 23 - в стесненных магнитных полях, силовые линии которых параллельны плоскости диска и радиально расходятся от центров магнитов к их периферии. Магнитные цепи магнитов замкнуты дисками магнитопроводов 82, 83. На обращенных к маятнику торцевых поверхностях корпусов 48, 49 выполнены электроды емкостных датчиков угла с 84 по 87 и с 88 по 91 соответственно. Электроды 84, 85, 86, 87 через металлизированные отверстия 92, 93, 94, 95 соединены со входами усилителя обратной связи контактными площадками 96, 97, 98, 99, расположенными на торцевой наружной поверхности первого корпуса, обращенной от маятника. Электроды 88, 89, 90, 91 связаны электропроводящими стойками 100, 101, 102, 103, фиг.5, укрепляемыми в отверстиях 104, 105, 106, 107 корпуса 49 и проходящими через окна 29, 30, 31, 32 крутильного маятника и через отверстия 108, 109, 110, 111 корпуса 48 и соединенные посредством токоподводов 112, 113, 114, 115 с входами усилителя обратной связи. На обращенных к маятнику торцевых поверхностях корпусов 48, 49 выполнены электропроводящие выступы 116, 117, 118, 119 и 120, 121, 122, 123 соответственно, которые через свои центральные металлизированные отверстия связаны посредством токоподводов 124, 125, 126, 127 и 128, 129, 130, 131 с контактными площадками с 133 по 136, размещенными в пазах на цилиндрических поверхностях корпусов 48, 49. При соединении корпусов 48, 49 с маятником контактные площадки установочной пластины приходят в соприкосновение с электропроводящими выступами. Надежный электрический контакт электропроводящих выступов и контактных площадок обеспечивается путем внесения электропроводящего клея через металлизированные отверстия в электропроводящих выступах. Высота электропроводящих выступов соответствует желаемому зазору между дисками маятника и обращенными к нему торцевыми поверхностями корпусов.
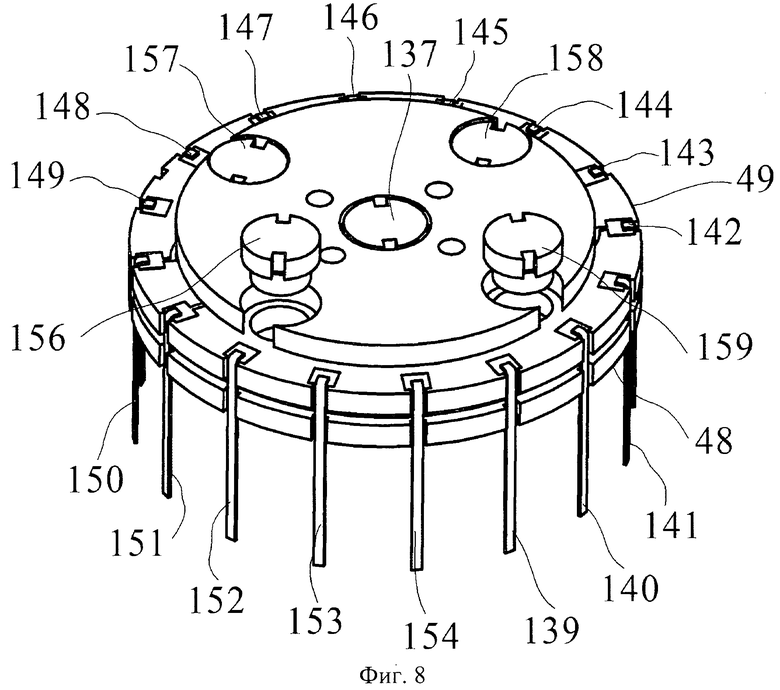
Возможен иной вариант формирования указанных зазоров и обеспечения необходимых электрических соединений. В этом варианте выступы формируются по обе стороны установочных пластин под контактными площадками 2, 3, 4, 5, 6, 7, 8, 9, а также на месте электропроводящих выступов 116, 117, 118, 119, 120, 121, 122, 123, на изолированных корпусах 48, 49 формируются контактные площадки, связанные через металлизированные отверстия с электрическими цепями гироскопа таким же образом, как и ранее рассмотренные электропроводящие выступающие выводы со 116 по 123. Крутильный маятник, корпуса 48, 49, магнитопроводы 82, 83 базируются и фиксируются относительно друг друга с помощью винта 137 и резьбовой втулки 138, выполненной в магнитопроводе 82. Электрические соединения обмоток 22, 23 компенсационных датчиков момента с выходами усилителя обратной связи, обмотки возбуждения 21 с генератором сигнала возбуждения и системой регулировки крутильных колебаний осуществляется с помощью проводников 139-155, напаянных на соответствующие контактные площадки, расположенные в пазах на цилиндрических поверхностях корпусов 48, 49 (фиг.8).
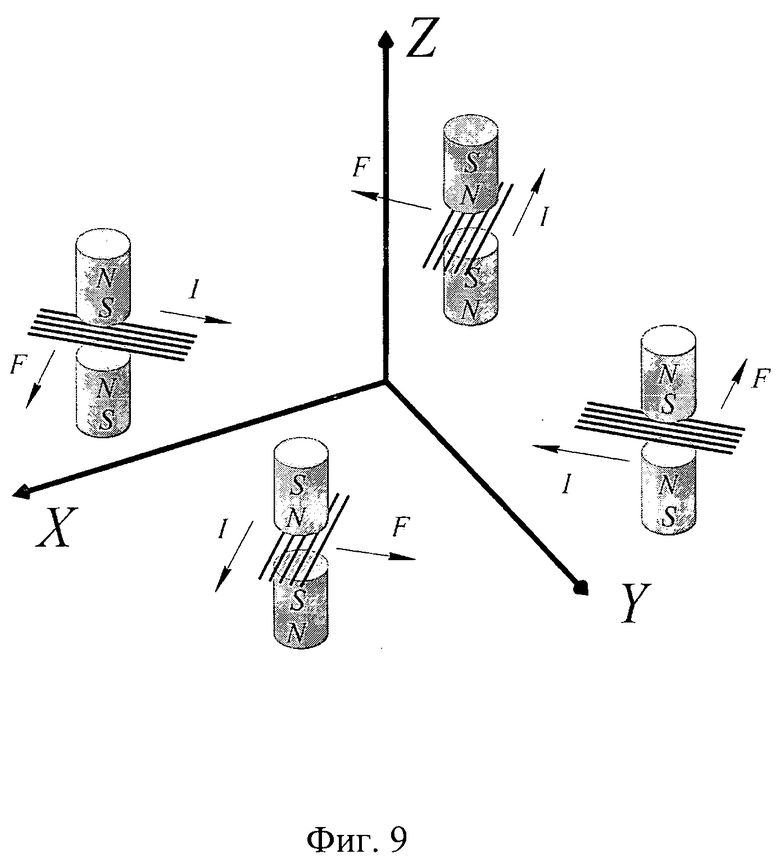
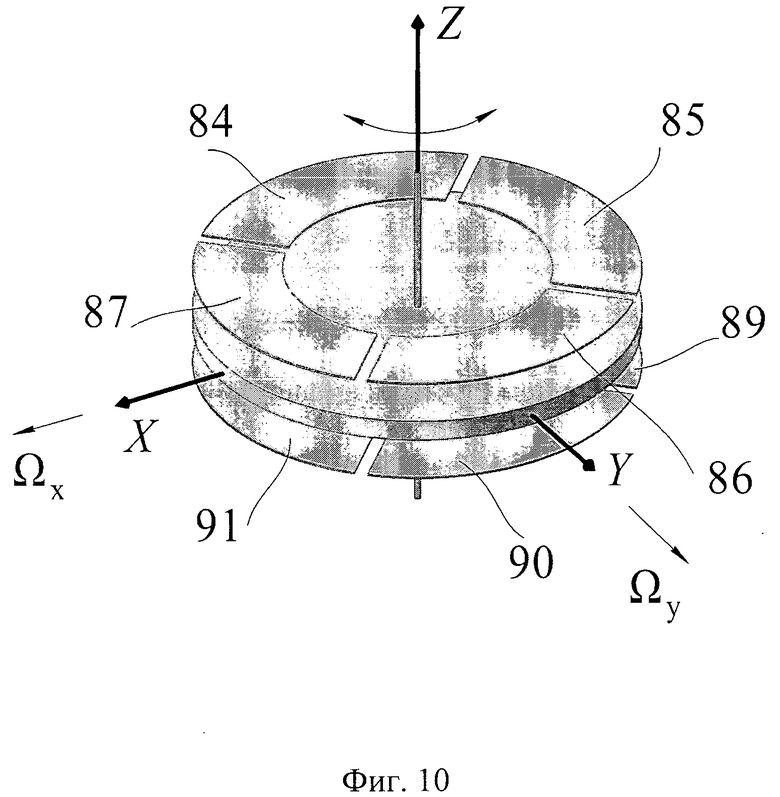
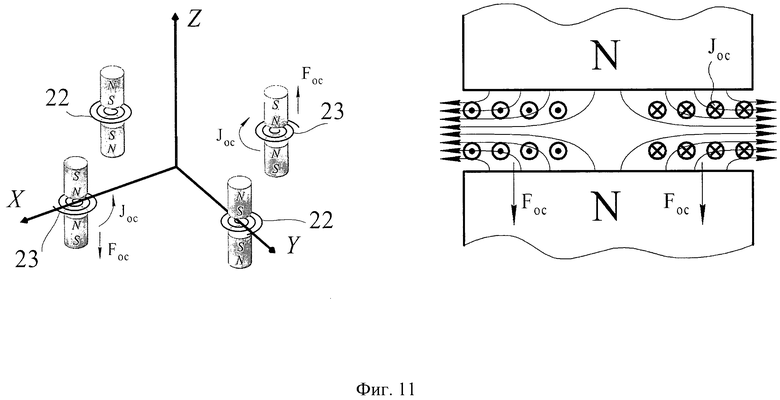
Предлагаемый гироскоп работает следующим образом. В обмотку возбуждения 21 с помощью генератора сигнала возбуждения подается переменный ток I. При этом, как показано на фиг.9, возникают магнитоэлектрические силы F в радиально ориентированных участках обмотки 21, находящихся в магнитном поле, и маятнику сообщаются крутильные колебания. При вращении корпуса прибора, например, вокруг оси Х со скоростью Ωx (фиг.10) возникает переменный момент кориолисовых сил, ориентированных вдоль оси Y, который вызывает колебания диска маятника вокруг оси Y. Эти колебания воспринимаются емкостным датчиком угла ДУ (электроды 85, 87, 89, 91), который формирует сигнал, пропорциональный углу отклонения диска. Сигнал усиливается посредством усилителя обратной связи, создающего ток IOC в спиральной обмотке компенсационного датчика момента 23 (фиг.11). Под действием этого тока в спиральных обмотках 23, находящихся в стесненном магнитном поле, возникают магнитоэлектрические силы FOC. Эти силы создают переменный момент обратной связи, уравновешивающий момент кориолисовых сил. Так как момент кориолисовых сил пропорционален Ωx, а момент обратной связи пропорционален IOC, то IOC будет пропорционален Ωx. Измеряя ток IOC, можно определить Ωx. Аналогично осуществляется измерение угловой скорости Ωy. Использование в гироскопе магнитоэлектрических датчиков возбуждения и магнитоэлектрических компенсационных датчиков обратной связи, в отличие от электростатических датчиков, способствует развитию значительных уровней момента при больших зазорах, что позволяет снизить требования к добротности колебаний маятника и дает возможность использовать гироскоп без вакуумирования. Это упрощает конструкцию гироскопа и технологию его изготовления.
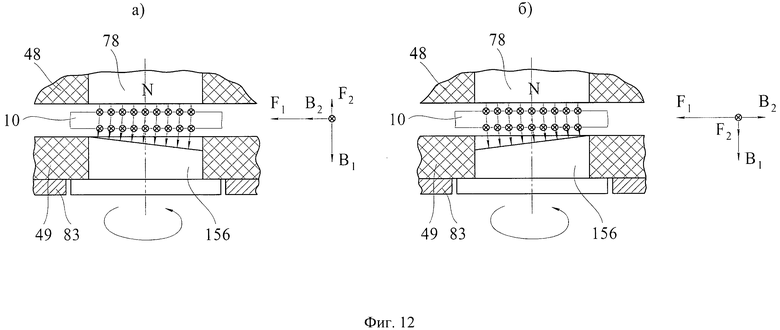
Существенным недостатком прототипа является невозможность регулировки его квадратурного сигнала в процессе изготовления и сборки гироскопа. С целью обеспечения регулировки квадратурной составляющей сигнала предлагается в одном из изолированных корпусов устанавливать (фиг.5) вместо постоянных магнитов (например, 66, 68, 70, 72) цилиндрические магнитопроводящие вкладыши со скошенными торцами, обращенными к диску. Ориентацию скошенного торца относительно радиально ориентированных участков обмотки возбуждения можно менять, осуществляя разворот вкладышей вокруг центральных осей их цилиндров. Влияние изменения ориентации вкладыша 156 иллюстрируется на фиг.12 а, б. Здесь при развороте магнитопроводящего вкладыша 156 от положения а) на 180° (положение б) изменяется направление составляющей магнитного потока (индукция В2) и соответственно изменяется знак составляющей магнитоэлектрической силы F2, вызывающей колебания маятника вокруг выходных осей прибора. Составляющая магнитоэлектрической силы F1, вызванная индукцией B1, при этом остается неизменной. Эта составляющая магнитоэлектрической силы F1 создает крутильные колебания маятника. При развороте вкладыша 156 на 90º по отношению к положениям фиг.12 сила F1 становится равной нулю. Таким образом, путем регулировки положения вкладышей в собранном приборе (фиг.8) обеспечивается возможность устранения колебания маятника вокруг выходных осей, вызывающих появление квадратурного сигнала гироскопа.
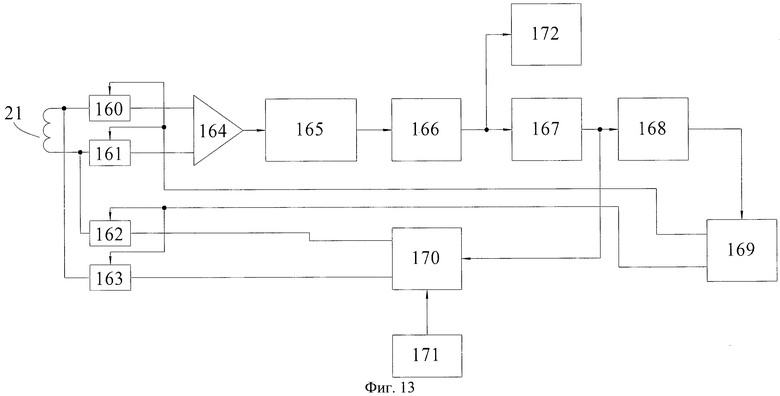
Масштабный коэффициент гироскопа зависит от амплитуды угловой скорости его крутильных колебаний, поэтому для его качественной работы необходимы измерение и стабилизация этой скорости. Кроме того, желательно с целью уменьшения мощности, потребляемой генератором сигнала возбуждения, обеспечить крутильные колебания маятника на частоте, близкой к резонансной. С целью устранения нестабильности работы гироскопа желательно обеспечить синхронизацию частоты крутильных колебаний и частоту питания емкостных датчиков угла. Для реализации поставленной задачи предлагается использовать в генераторе сигнала возбуждения управляемый напряжением автоколебательный генератор, с установленными на его выходе двумя последовательно соединенными делителями частоты. В предлагаемом устройстве обмотка возбуждения 21 используется в режиме разделения функций во времени (то для создания момента, вызывающего крутильные колебания маятника, то как обмотка датчика угловой скорости крутильных колебаний маятника). Для обеспечения этого обмотка подключается к схеме посредством четырех переключателей 160, 161, 162, 163 (фиг.13). В случае замыкания переключателей 160, 161 переключатели 162, 163 разомкнуты и наоборот.
Рассмотрим режим работы обмотки 21 в режиме датчика угловой скорости крутильных колебаний маятника. При этом замкнуты переключатели 160, 161. В радиально ориентированных участках колеблющейся вместе с диском обмотки, находящихся в магнитном поле, наводится ЭДС, пропорциональная скорости диска. Эта ЭДС усиливается усилителем 164 и через формирователь сигнала управления 165, преобразующий ЭДС в постоянное напряжение и запоминающий его на время, когда ключи 160, 161 разомкнуты, управляет частотой автоколебательного генератора 166. К выходам генератора 166 подключены электроды 88-95 емкостного датчика угла 172 и два последовательно соединенных делителя частоты 167 и 168. Выход делителя 167 управляет состоянием мостового переключателя тока 170, одна из диагоналей которого подключена к источнику электрического тока 171, а вторая через переключатели 162 и 163 может подключаться к обмотке возбуждения 21.
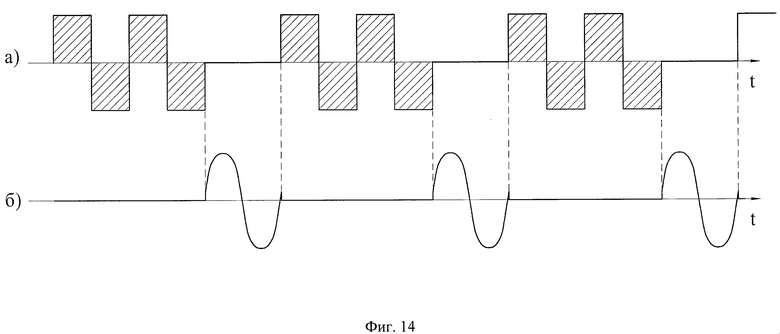
Выходы делителя частоты 168 связаны через дешифратор 169 с управляющими входами переключателей 160, 161, 162, 163. При замыкании переключателей 162, 163 через обмотку 21 течет импульсный ток возбуждения крутильных колебаний диска. Так как диск с упругим подвесом представляет собой высокодобротную колебательную систему, то наличие перерывов в подаче тока возбуждения в обмотку 21 практически не сказывается на колебаниях диска. Графики изменения во времени тока датчика момента возбуждения (а) и ЭДС, подаваемой с обмотки 21 на вход усилителя 164 (б), приведены на фиг.14. При этом также обеспечивается синхронизация частоты возбуждения емкостного датчика угла с частотой крутильных колебаний диска, что исключает появление нестабильности (биений) выходного сигнала гироскопа.
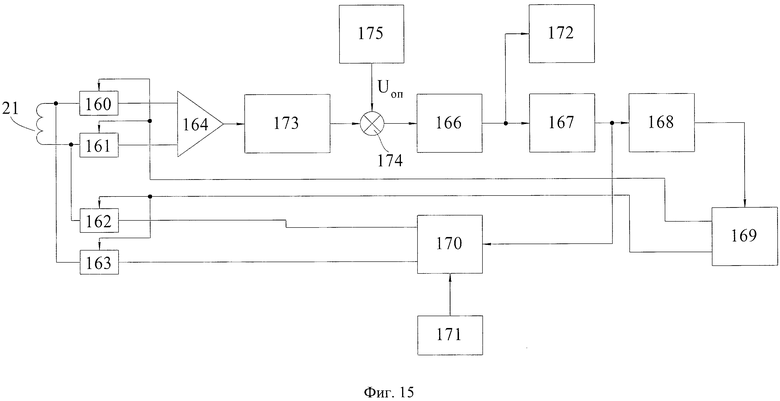
Для стабилизации угловой скорости крутильных колебаний диска могут применяться два варианта построения схемы. В первой схеме (фиг.15) формирователь сигнала 165 содержит последовательно соединенные измеритель амплитуды ЭДС 173 и сумматор 174, на второй вход которого подано опорное напряжение Uоп от источника 175. Автоколебательный генератор, используемый в данной схеме, при нулевом входном управляющем напряжении формирует частоту f1 на выходе первого делителя частоты 167, меньшую, чем резонансная частота маятника.
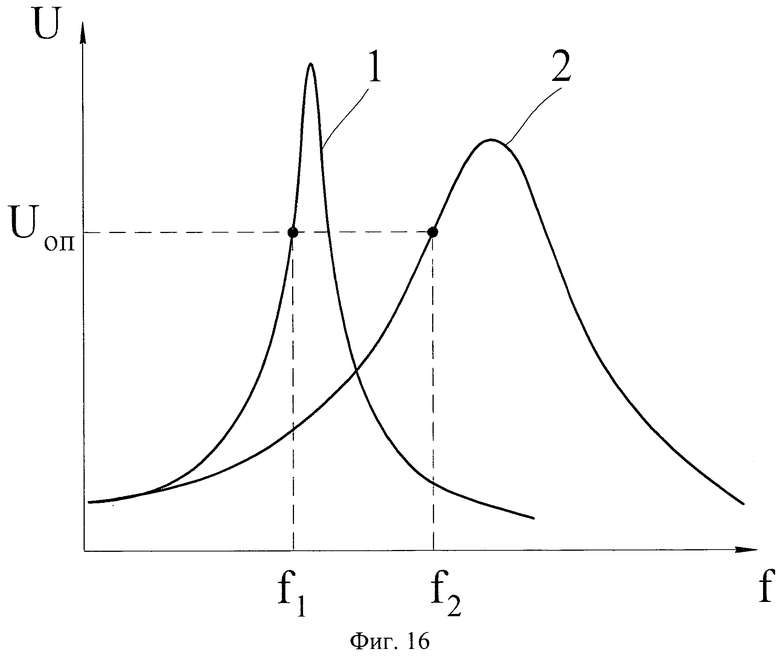
Процесс регулирования колебаний маятника поясняется фиг.16. Здесь (кривая 1) показана амплитудно-частотная характеристика маятника. U - обозначена амплитуда колебаний, f - частота на выходе первого делителя частоты 167. Начальная настройка системы, когда U-Uоп=0, соответствует частоте f1. Если резонансная характеристика маятника изменяется (кривая 2), например, из-за изменения температуры, то ЭДС, снимаемая с обмотки 21, уменьшается и разностный сигнал U-Uоп, не равный нулю, изменяет частоту автоколебательного контура до частоты f2 на выходе делителя частоты 167. Таким образом восстанавливается заданная угловая скорость крутильных колебаний диска.
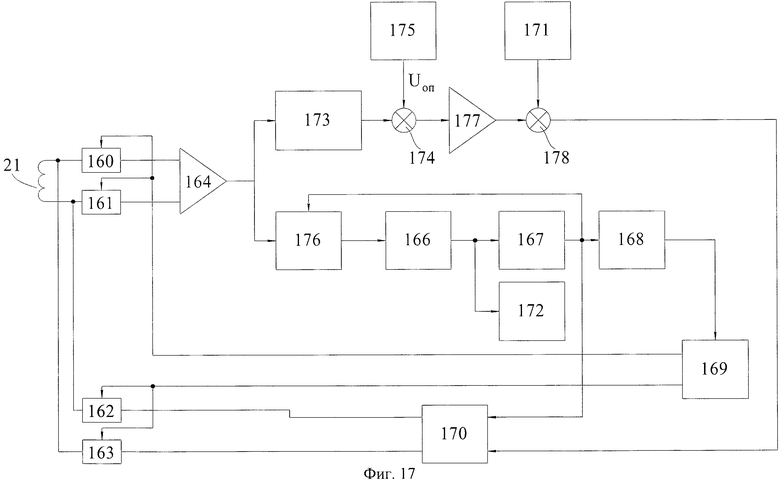
Во втором варианте построения схемы, показанном на фиг.17, сигнал от усилителя 164 подается на измеритель фазы 176, второй вход которого подключен к выходу первого делителя частоты 167. Измеритель фазы формирует постоянное напряжение, пропорциональное разности фазы ЭДС и 90°, и запоминает это напряжение на время, когда ключи 160, 161 разомкнуты. Это напряжение управляет частотой автоколебательного генератора 166. Автоколебательный генератор, используемый в данной схеме при нулевом входном управляющем сигнале, формирует частоту f1 на выходе первого делителя частоты 167, равную резонансной частоте маятника.
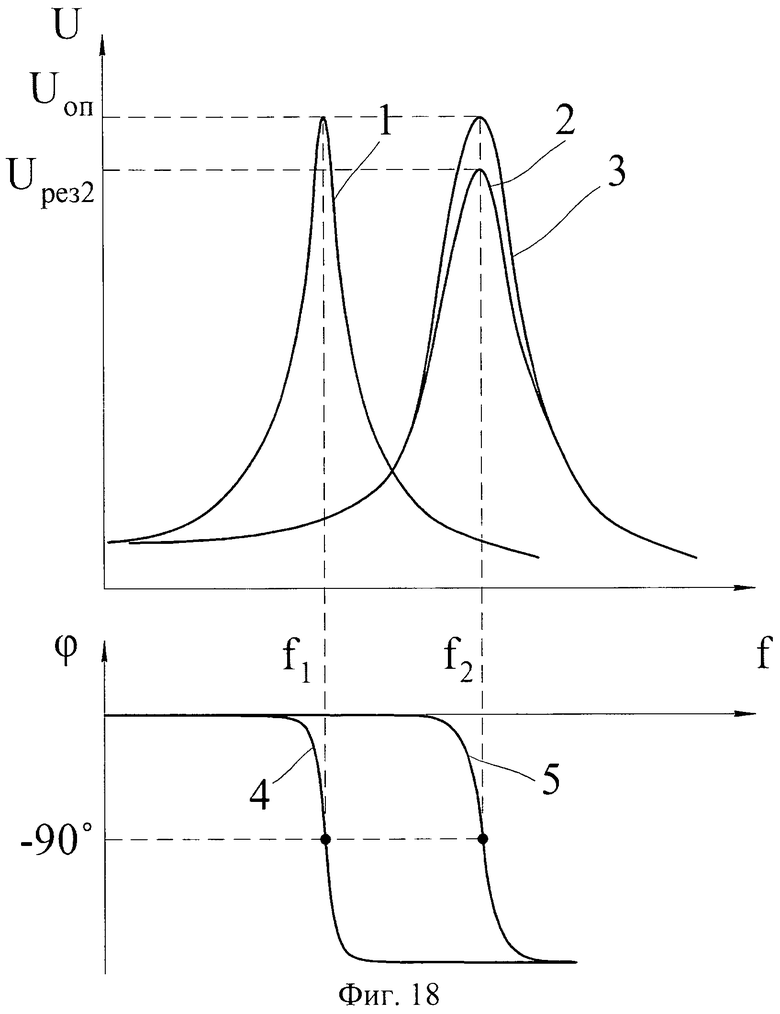
Процесс регулирования колебаний маятника поясняется фиг.18. Здесь графики 1 и 4 соответствуют амплитудно-частотной и фазовой характеристикам маятника. Начальная настройка системы, когда φ4-90°=0 (φ4 - фаза по графику 4), соответствует частоте f1 (резонанс, т.к. φ4=90°). При изменении параметров маятника, например при изменении температуры, амплитудно-частотная характеристика будет соответствовать графику 2, а фаза ЭДС - графику 5 (φ5). Разностный сигнал φ5-90º формирует напряжение, управляющее автоколебательным генератором, которое изменяет частоту на выходе первого делителя частоты 167 до значения f2 (резонанс). Однако из-за изменения добротности маятника амплитуда угловой скорости на резонансе изменяется. Для восстановления начальной амплитуды в схеме фиг.17 используется измеритель амплитуды ЭДС 173 и сумматор 174, на второй вход которого подано опорное напряжение Uоп от источника 175. Разностный сигнал Uоп-Upeз.2 (Upeз.2 - резонансное значение ЭДС, соответствующее кривой 2) усиливается усилителем мощности 177 и добавляется посредством сумматора 178 к напряжению источника тока 171, осуществляющего питание мостового переключателя 170. При этом ток в обмотке датчика момента возбуждения 21 увеличивается и восстанавливается заданная угловая скорость крутильных колебаний диска 10 (кривая 3 фиг.18).
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2019 |
|
RU2731652C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2020 |
|
RU2795114C2 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2009 |
|
RU2400708C1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ МИКРОМЕХАНИЧЕСКОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2012 |
|
RU2497133C1 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2289788C1 |

Изобретение относится к навигационной технике. Гироскоп содержит диск, закрепленный с помощью упругого подвеса и установочной пластины, датчик момента возбуждения, два емкостных датчика угла, предназначенных для измерения колебаний диска вокруг осей, нормальных оси крутильных колебаний (выходных осей гироскопа), два компенсационных датчика момента. Датчик момента возбуждения имеет на поверхности диска печатные обмотки с радиально ориентированными прямолинейными участками, которые находятся в магнитном поле, образованном укрепленными в корпусе гироскопа постоянными магнитами, имеющими обращенные к диску разноименные полюса. Спиральные печатные обмотки компенсационных датчиков находятся в магнитном поле, образованном укрепленными в корпусе гироскопа постоянными магнитами, имеющими обращенные к диску одноименные полюса. Гироскоп содержит также регулирующую систему, позволяющую поддерживать постоянство угловой скорости крутильных колебаний диска, системы обратной связи, компенсирующие колебания диска вокруг выходных осей. Изобретение обеспечивает возможность регулировки квадратурных составляющих сигнала гироскопа. 12 з.п. ф-лы, 18 ил.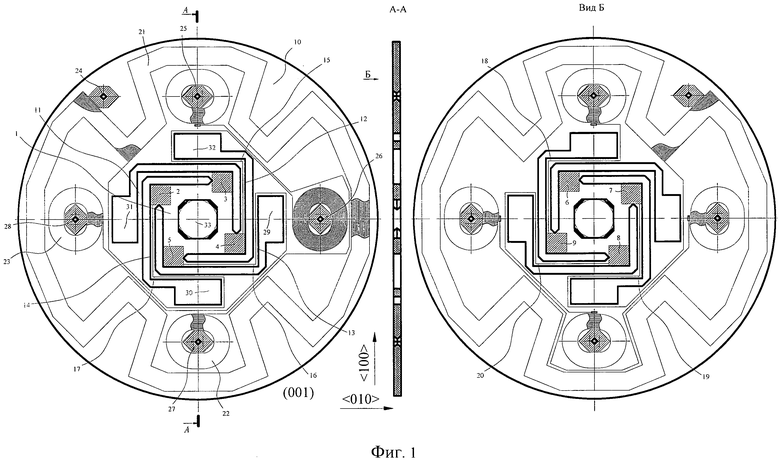
1. Микромеханический вибрационный гироскоп, содержащий два изолированных дискообразных корпуса с укрепленным между их торцами с зазором крутильным маятником, в состав которого входят осесимметричный диск с размещенной в его отверстии установочной пластиной, связанной с диском посредством упругого подвеса, обеспечивающего возможность поворота диска вокруг оси симметрии (ось возбуждения) и нормальных к ней осей (выходные оси), датчик момента возбуждения и генератор возбуждения, предназначающиеся для возбуждения колебаний диска вокруг оси симметрии, компенсационные датчики моментов, создаваемых вокруг выходных осей, емкостные датчики углов поворота диска вокруг выходных осей, содержащие электроды, выполненные на обращенных к диску торцах двух изолированных корпусов гироскопа, причем электроды связаны с компенсационными датчиками моментов посредством усилителей сигналов обратной связи, системы регулировки крутильных колебаний маятника, системы компенсации квадратурных сигналов гироскопа, отличающийся тем, что, с целью повышения точности, датчик момента возбуждения содержит связанные с генератором сигнала возбуждения печатные обмотки, выполненные на изолированных торцевых поверхностях диска и имеющие радиально ориентированные участки, размещенные в магнитных полях, нормальных торцевым поверхностям диска, и создаваемым укрепленными в изолированных корпусах гироскопа и обращенными к диску разноименными полюсами постоянными магнитами датчика момента возбуждения, компенсационные датчики моментов содержат спиральные печатные обмотки, размещенные в стесненных магнитных полях, образованных укрепленными в изолированных корпусах гироскопа и обращенными к диску одноименными полюсами постоянными магнитами компенсационных датчиков момента.
2. Микромеханический вибрационный гироскоп по п.1, отличающийся тем, что печатные обмотки датчика момента возбуждения и компенсационных датчиков момента размещены на обеих торцевых поверхностях диска, соединены между собой через отверстия в диске и соединены с выходами генератора сигнала возбуждения и входом системы регулировки крутильных колебаний маятника посредством дополнительно вводимых печатных токоподводов, выполненных на поверхностях упругого подвеса, контактных площадок, выполненных на поверхностях установочной пластины, и токоподводов, выполненных на изолированных дискообразных корпусах гироскопа.
3. Микромеханический вибрационный гироскоп по п.2, отличающийся тем, что усилители обратной связи размещены на обращенном от маятника торце первого изолированного дискообразного корпуса, электроды, выполненные на обращенном к маятнику торце первого изолированного дискообразного корпуса связаны со входами усилителей обратной связи посредством металлизированных отверстий в теле первого изолированного корпуса и контактных площадок, выполненных на торцевой поверхности первого изолированного дискообразного корпуса, обращенной от маятника, а электроды, выполненные на обращенном к маятнику торце второго изолированного дискообразного корпуса, соединены с входами усилителей обратной связи посредством электропроводящих стоек, проходящих в окна крутильного маятника и в отверстия первого изолированного дискообразного корпуса.
4. Микромеханический вибрационный гироскоп по п.2, отличающийся тем, что диск выполнен из пластины монокристаллического кремния с плоскостью среза (001) и связан с установочной пластиной через упругий подвес, содержащий дополнительно вводимую рамку и растяжки, соединенные с внутренней и наружной поверхностями рамки, причем растяжки ориентированы по кристаллографическим направлениям <100> и <010>.
5. Микромеханический вибрационный гироскоп по одному из пп.1, 2 и 3, отличающийся тем, что диск выполнен из пластины монокристаллического кремния с плоскостью среза (001), а упругий подвес выполнен в виде четырех спиралей с прямолинейными участками, ориентированными по кристаллографическим направлениям <100> и <010>.
6. Микромеханический вибрационный гироскоп по п.5, отличающийся тем, что спирали упругого подвеса, связаны с установочной пластиной непосредственно, а с диском через две дополнительно вводимые рамки, соединенные между собой и с диском через четыре растяжки, попарно ориентированные по кристаллографическим направлениям <100> и <010>.
7. Микромеханический вибрационный гироскоп по п.5, отличающийся тем, что спирали упругого подвеса, связаны с диском непосредственно, а с установочной пластиной через две дополнительно вводимые рамки, соединенные между собой и с установочной пластиной через четыре растяжки, попарно ориентированные по кристаллографическим направлениям <100> и <010>.
8. Микромеханический вибрационный гироскоп по п.5, отличающийся тем, что постоянные магниты датчика момента возбуждения укреплены только в одном изолированном корпусе гироскопа, а в другом установлены цилиндрические магнитопроводящие вкладыши со скошенными торцами, обращенными к диску, причем обеспечивается возможность разворота вкладышей вокруг центральных осей их цилиндров.
9. Микромеханический вибрационный гироскоп по п.5, отличающийся тем, что зазоры между торцевыми поверхностями диска и изолированными дискообразными корпусами образованы посредством электропроводящих выступов, сформированных на обращенных к маятнику торцевых поверхностях дискообразных изолированных корпусов и соприкасающихся с контактными площадками на поверхности установочной пластины.
10. Микромеханический вибрационный гироскоп по п.5, отличающийся тем, что зазоры между торцевыми поверхностями диска и изолированными дискообразными корпусами образованы посредством выступов, сформированных под контактными площадками на поверхностях установочной пластины.
11. Микромеханический вибрационный гироскоп по п.5, отличающийся тем, что генератор сигнала возбуждения выполнен в виде управляемого напряжением автоколебательного генератора частоты, вход которого подключен через дополнительно вводимые первый и второй переключатели и дополнительно вводимые усилитель и формирователь сигнала управления к обмотке датчика момента возбуждения, а выход - к электродам емкостного датчика угла и двум дополнительно вводимым последовательно соединенным делителям частоты; выход первого делителя частоты подключен к управляющему входу дополнительно вводимого мостового переключателя тока, первая диагональ которого подключена к источнику тока, а вторая диагональ через дополнительно вводимые третий и четвертый переключатели - к обмотке датчиков момента возбуждения, причем входы управления переключателей связаны с выходами второго делителя частоты через дополнительно вводимый дешифратор.
12. Микромеханический вибрационный гироскоп по п.11, отличающийся тем, что формирователь сигнала управления образован включенными последовательно измерителем амплитуды переменного напряжения и сумматором, второй вход которого подключен к дополнительно вводимому источнику опорного напряжения, а автоколебательный генератор частоты с первым делителем частоты, при нулевом управляющем напряжении, имеет настройку на частоту, меньшую резонансной частоты крутильных колебаний диска.
13. Микромеханический вибрационный гироскоп по п.11, отличающийся тем, что формирователь сигнала управления образован измерителем фазы, опорный вход которого подключен к выходу первого делителя частоты, и дополнительно выход усилителя сигнала управления подключен через последовательно соединенные измеритель амплитуды переменного напряжения и сумматор, второй вход которого подключен к источнику опорного напряжения, а выход ко входу усилителя мощности, выход которого подключен к первой диагонали мостового переключателя тока, а управляемый напряжением автоколебательный генератор частоты с первым делителем частоты при нулевом управляющем напряжении имеет настройку на резонансную частоту крутильных колебаний диска.
| US 6067858 А, 30.05.2000 | |||
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП (ВАРИАНТЫ) И СПОСОБЫ ЕГО НАСТРОЙКИ, ОСНОВАННЫЕ НА ИСПОЛЬЗОВАНИИ АМПЛИТУДНО-МОДУЛИРОВАННОГО КВАДРАТУРНОГО ТЕСТОВОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2388999C1 |
| ЭЛЕКТРОДНАЯ СТРУКТУРА ДЛЯ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП С ЭТОЙ СТРУКТУРОЙ (ВАРИАНТЫ) | 2007 |
|
RU2344374C1 |
| СПОСОБ ПОДСТРОЙКИ РЕЗОНАНСНОЙ ЧАСТОТЫ ПОДВЕСА ПОДВИЖНОЙ МАССЫ МИКРОМЕХАНИЧЕСКОГО ГИРОСКОПА ПО ОСИ ВТОРИЧНЫХ КОЛЕБАНИЙ И МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2308682C1 |
| US 5783749 А, 21.07.1998 | |||
| US 6505511 B1, 14.06.2003. | |||

