Изобретение относится к электротехнике и может быть использовано для управления синхронной машиной, в частности для управления синхронной машиной в режиме вентильного электродвигателя.
Известен способ пуска синхронной машины в режиме вентильного электродвигателя (Ильин, В.И., Гинзбург, С.М., Севастьянова, В.Н. О пуске синхронной машины в режиме вентильного двигателя с имитатором положения ротора. – М.: Журнал «Электричество». – 1982. – № 2. – С. 55 – 59), подключённой к питающей сети через последовательно соединённые выпрямитель и зависимый инвертор, по которому, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения, вычисляют угол поворота, имитирующий угловое перемещение ротора синхронной машины в период времени (во временной интервал) между коммутациями тиристоров зависимого инвертора, и осуществляют указанную коммутацию тиристоров зависимого инвертора в момент сравнения вычисленного угла поворота с заданной уставкой угла.
Недостаток способа связан с тем, что имитирующее угловое перемещение ротора синхронной машины не синхронизировано с угловым положением ротора синхронной машины, в результате чего:
развиваемый синхронной машиной электромагнитный момент может иметь знакопеременный характер, что приводит к колебаниям вала ротора синхронной машины и механизмов, приводимых во вращении синхронной машиной, что снижает сроки эксплуатации механизмов;
развиваемый синхронной машиной электромагнитный момент может не достичь оптимального значения, что затягивает время пуска синхронной машины и увеличивает тепловую загрузку тиристоров, в результате снижаются надёжность пуска.
Наиболее близким по технической сущности, принятым за прототип, является способ пуска синхронной машины в режиме вентильного электродвигателя (SU1339847A1, опубликовано 23.09.87), подключённой к питающей сети через последовательно соединённые выпрямитель и зависимый инвертор, по которому, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения, измеряют напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины, измеряют фазу этого напряжения и контролируют достижение фазы измеряемого напряжения заданной уставки фазы для осуществления указанной коммутации тиристоров зависимого инвертора.
Напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины определяется в основном электродвижущей силой (ЭДС) вращения фазной обмотки статора, формируемой обмоткой возбуждения, которая при вращении ротора синхронной машины принимает синусоидальную форму, а, значит, фаза синусоидального сигнала изменяется в диапазоне от минус 180 до плюс 180 электрических градусов. Также фаза ЭДС вращения, формируемой обмоткой возбуждения, в необтекаемой током зависимого инвертора фазной обмотке синхронной машины определяет угловое положения ротора синхронной машины. Зная угловое положение ротора синхронной машины, можно формировать воздействие на синхронную машину посредством выпрямителя и зависимого инвертора для создания необходимого электромагнитного момента синхронной машины для её вращения в строго заданную сторону.
Недостатки прототипа заключаются в следующем.
Во-первых, если коммутации тиристоров зависимого инвертора, в частности, первые коммутации тиристоров зависимого инвертора, будут выполнены таким образом, при котором фаза напряжения, контролируемого в необтекаемой током зависимого инвертора фазной обмотке синхронной машины, не достигнет заданного значения, то очередная коммутация тиристоров зависимого инвертора не может быть осуществлена. В этом случае пусковой процесс прерывается и оператором производится повторный пуск синхронной машины, в результате чего время пуска возрастает и надёжность пуска синхронной машины снижается.
Во-вторых, из-за ёмкостных связей питающей сети выпрямителя и обмоток статора синхронной машины с «землёй» коммутации тиристоров выпрямителя оказывают влияние на напряжение в необтекаемой током зависимого инвертора фазной обмотке статора синхронной машины, что приводит к недостаточно точным измерениям фазы напряжения в необтекаемой током зависимого инвертора фазной обмотке статора синхронной машины. Это обуславливает снижение электромагнитного момента, развиваемого синхронной машиной, увеличение времени пуска синхронной машины и тепловой нагрузки тиристоров, и как следствие, снижение надёжности пуска синхронной машины.
Задача, на решение которой направлено заявляемое техническое решение, заключается в том, чтобы производить надёжный пуск синхронной машины без нарушения периодичности коммутаций тиристоров зависимого инвертора, с учётом начального положения ротора синхронной машины и более точного контроля углового положения ротора синхронной машины между очередными коммутациями тиристоров зависимого инвертора.
При решении поставленной задачи достигаемый технический результат заключается в повышении надёжности пуска синхронной машины и улучшении технико-экономических показателей силового оборудования.
В соответствии с первым вариантом предложенного технического решения указанная задача достигается способом пуска синхронной машины, подключённой к сети через последовательно соединённые выпрямитель и зависимый инвертор, заключающемся в том, что, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения, измеряют напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины, измеряют фазу этого напряжения и сравнивают её с заданной уставкой фазы, дополнительно вычисляют угол поворота, имитирующий угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, сравнивают его с заданной уставкой угла и осуществляют указанную коммутацию тиристоров зависимого инвертора при достижении вычисляемого угла поворота с заданной уставкой угла или достижении измеряемой фазы напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины с заданной уставкой фазы.
Кроме того, первую коммутацию тиристоров зависимого инвертора осуществляют по определенному начальному угловому положению ротора синхронной машины, а угол поворота, имитирующего перемещение ротора синхронной машины в период между первой и второй коммутациями и тиристоров зависимого инвертора, вычисляют с учётом определенного начального углового положения ротора синхронной машины.
В соответствии со вторым вариантом предложенного технического решения указанная задача достигается способом пуска синхронной машины, подключённой к сети через последовательно соединённые выпрямитель и зависимый инвертор, заключающемся в том, что, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения, измеряют напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины, измеряют фазу этого напряжения и сравнивают её с заданной уставкой фазы, дополнительно вычисляют угол поворота, имитирующий угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, сравнивают его с заданной уставкой угла, отсчитывают время от последней очередной коммутации тиристоров зависимого инвертора, определяют период измеряемого напряжения, вычисляют угол поворота ротора синхронной машины с учётом отсчитываемого времени и определяемого периода измеряемого напряжения, сравнивают его с заданной уставкой угла и осуществляют указанную коммутацию тиристоров зависимого инвертора, если измеряемая фаза напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины не меньше заданной уставкой фазы и определяемый угол поворота ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора не меньше заданной уставкой угла или в момент достижения вычисляемого угла поворота, имитирующего угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, заданной уставкой угла.
Кроме того, первую коммутацию тиристоров зависимого инвертора осуществляют по определенному начальному угловому положению ротора синхронной машины, а угол поворота, имитирующего перемещение ротора синхронной машины в период между первой и второй коммутациями и тиристоров зависимого инвертора, вычисляют с учётом определенного начального углового положения ротора синхронной машины.
Суть предложенных технических решений заключается в том, что использование функций вычисления угла поворота, имитирующего угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, и сравнения его с заданной уставкой угла даёт возможность устранить прерывания пускового процесса синхронной машины, когда по каким-либо причинам измерение фазы напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины оказываются невыполненными. Посредством функции контроля угла поворота ротора синхронной машины повышается точность определения углового положения ротора синхронной машины, что способствует повышению надёжности пуска синхронной машины. Этим же целям служит функция призванная учитывать начальное угловое положение ротора синхронной машины при первой коммутации тиристоров зависимого инвертора.
Сущность предполагаемых изобретений поясняется рисунками, приведёнными на фиг. 1 – 4.
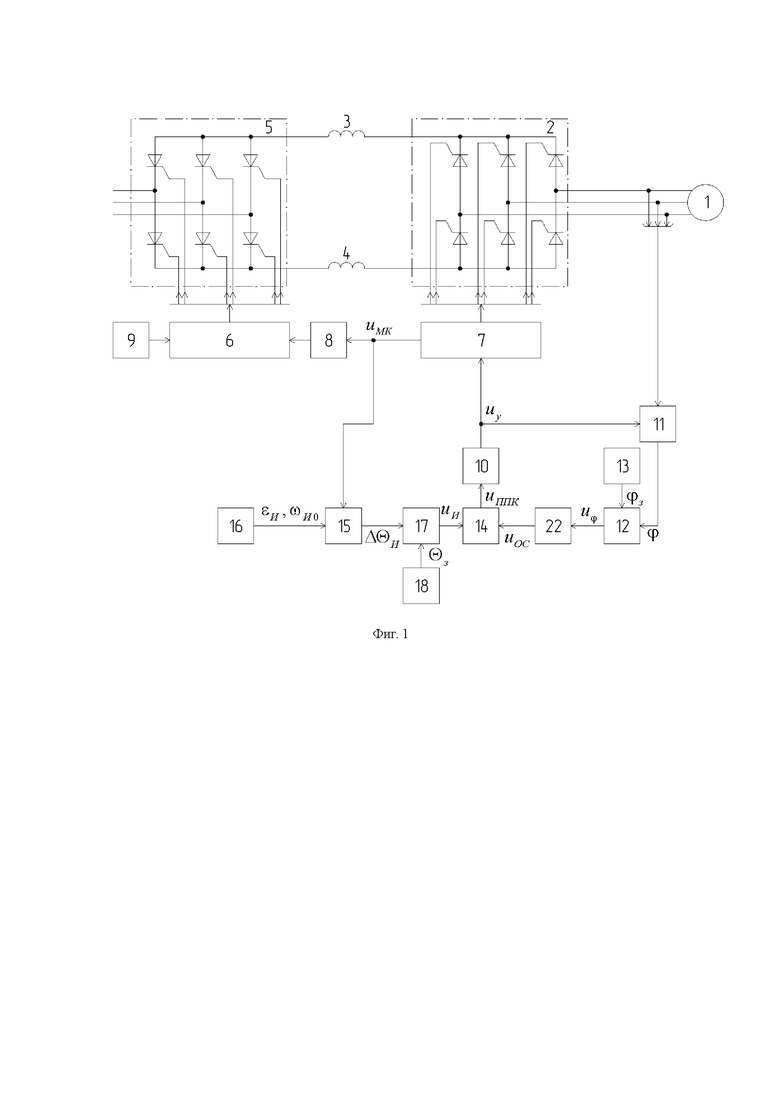
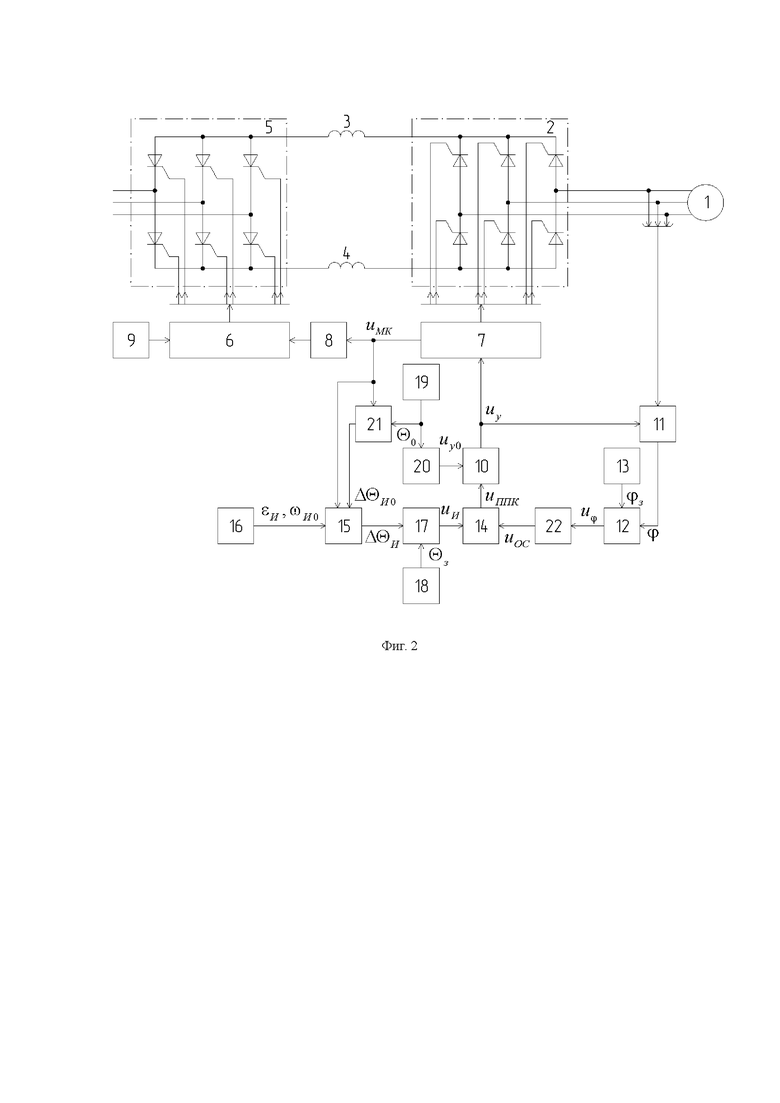
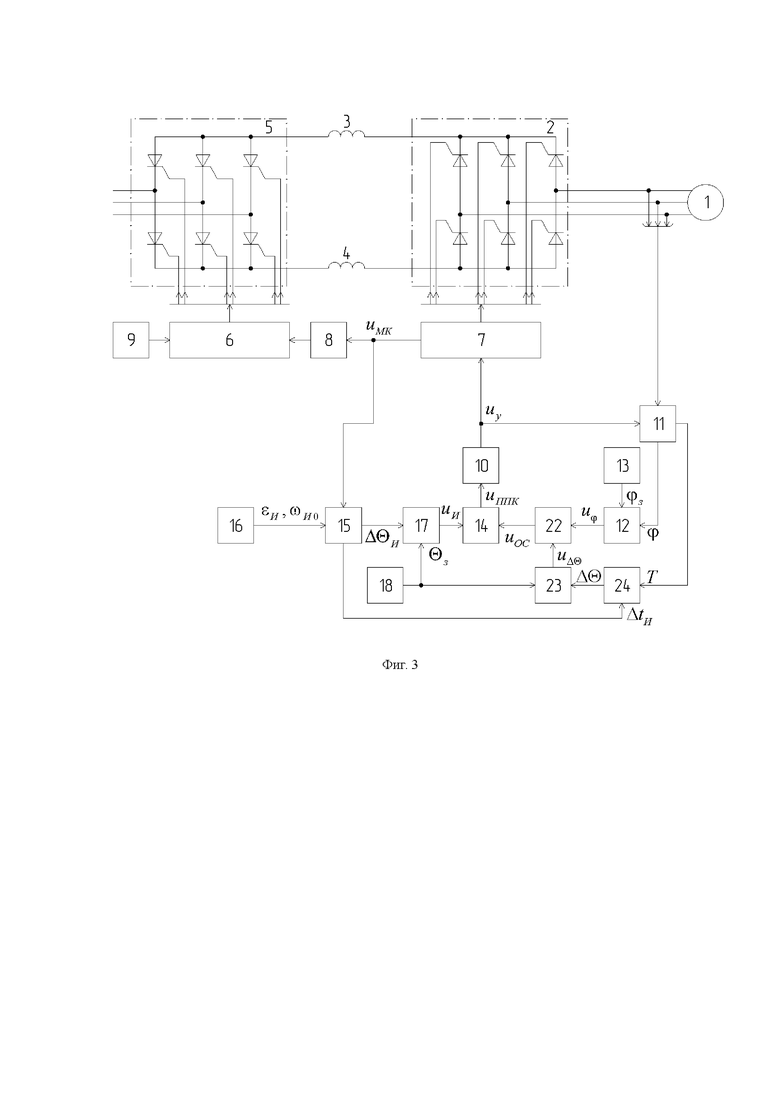
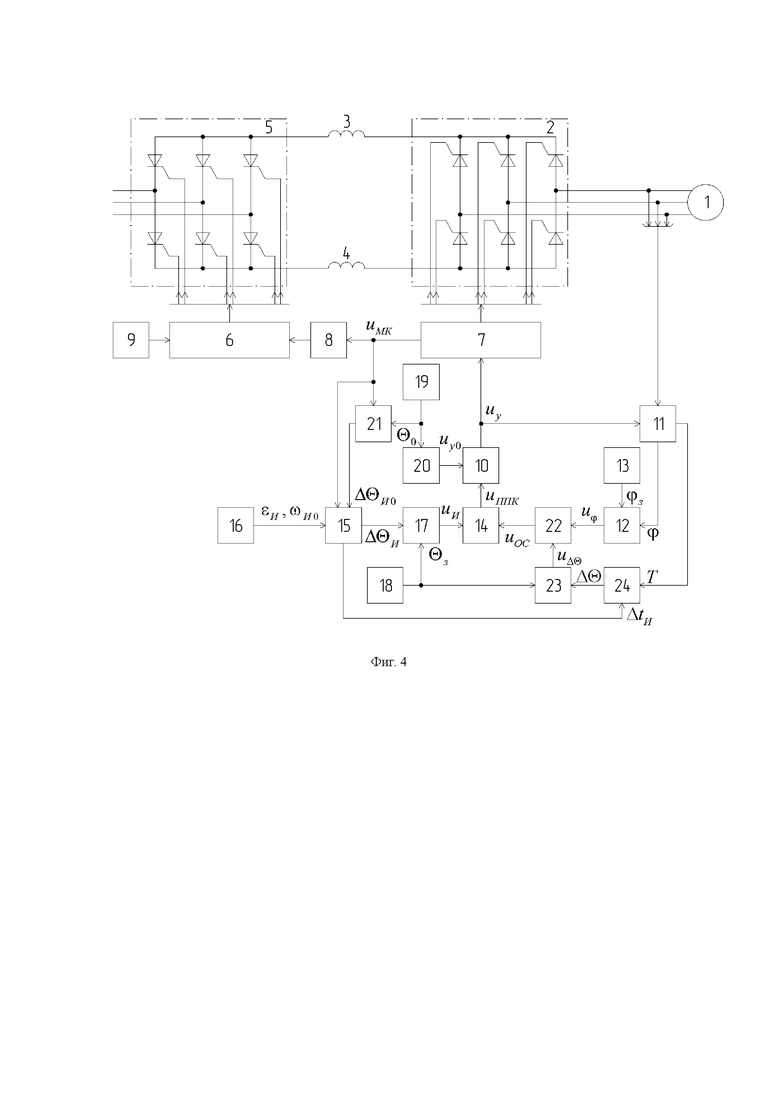
На фиг. 1 приведена одна из возможных функциональных схем реализации первого варианта способа пуска синхронной машины; на фиг. 2 – схема реализации его с учётом начального углового положения ротора синхронной машины; на фиг. 3 приведена одна из возможных функциональных схем реализации второго варианта способа пуска синхронной машины; на фиг. 4 – схема реализации его с учётом начального углового положение ротора синхронной машины. В приведённых схемах приняты следующие обозначения:
синхронная машина;
зависимый инвертор;
реактор;
реактор;
выпрямитель;
блок управления тиристорами выпрямителя;
блок управления тиристорами инвертора;
блок формирования импульсов гашения;
блок регулятора тока;
блок пересчётного кольца;
блок контроля обесточенного напряжения;
первый блок сравнения;
первый блок задания уставки;
логический элемент ИЛИ;
имитатор ротора синхронной машины;
второй блок задания уставки;
второй блок сравнения;
третий блок задания уставки;
блок определения начального углового положения ротора синхронной машины;
блок вычисления начального состояния пересчётного кольца;
блок вычисления начального состояния имитатора;
логический элемент И;
третий блок сравнения;
блок вычисления угла поворота ротора синхронной машины;



















Схема на фиг. 1 содержит синхронную машину 1, статорная обмотка которой подключена к силовому выходу зависимого инвертора 2, реализованного на тиристорах. Силовой вход зависимого инвертора 2 через реакторы 3 и 4 соединён с силовым выходом выпрямителя 5, реализованного на тиристорах. Силовой вход выпрямителя 5 предназначен для подключения к источнику переменного тока. Управление выпрямителем 5 осуществляется от блока управления тиристорами выпрямителя 6, управление зависимым инвертором 2 – от блока управления тиристорами инвертора 7. Управляющий выход блока управления тиристорами выпрямителя 6 соединён с входом выпрямителя 5 сигналами управления соответствующими тиристорами. Управляющий выход блока управления тиристорами инвертора 7 соединён с входом зависимого инвертора 2 сигналами управления соответствующими тиристорами. Выход гашения блока управления тиристорами инвертора 7 через блок формирования импульсов гашения 8 соединён с первым входом блока управления тиристорами выпрямителя 6, второй вход блока управления тиристорами выпрямителя 6 соединён с выходом блока регулятора тока 9. Выход блока пересчётного кольца 10 логическими сигналами управления тиристорами инвертора
Схема на фиг. 2 содержит дополнительно блок определения начального углового положения ротора синхронной машины 19, выход которого соединён с входом блока вычисления начального состояния пересчётного кольца 20 и первым входом блока вычисления начального состояния имитатора 21 сигналом начального положения ротора синхронной машины
Схема на фиг. 3 содержит дополнительно введённые элементы: логический элемент И 22; третий блок сравнения 23 и блок вычисления угла поворота ротора синхронной машины 24. При этом выход первого блока сравнения 12 связан с первым входом логического элемента ИЛИ 14 сигналом переключения пересчётного кольца по цепи обратной связи
Схема на фиг. 4 отличается от приведённой на фиг. 3 тем, что содержит блок определения начального углового положения ротора синхронной машины 19, блок вычисления начального состояния пересчётного кольца 20 и блок вычисления начального состояния имитатора 21, которые соединены, как указано на фиг. 2. А именно выход блока вычисления начального состояния пересчётного кольца 20 соединён со вторым входом блока пересчётного кольца 10 сигналами начального состояния пересчётного кольца
Техническое решение на фиг. 1 работает следующим образом. В любой момент времени, кроме момента коммутации тиристоров зависимого инвертора 2, при разгоне синхронной машины 1 проводят ток выпрямителя 5 только два плеча тиристорного моста зависимого инвертора 2: один в катодной группе одной фазы тиристорного моста, другой в анодной группе другой фазы тиристорного моста. Таким образом, синхронная машина 1 одной фазой статора подключена к реактору 3, а другой фазой статора – к реактору 4. Плечи третьей фазы тиристорного моста зависимого инвертора 2 обесточены, а, значит, фаза статора синхронной машины 1, подключённая к этой фазе тиристорного моста, также обесточена. Включение пары плеч тиристорного моста зависимого инвертора 2 производится блоком управления тиристорами инвертора 7. Включение той или иной пары плеч тиристорного моста зависимого инвертора 2 зависит от логических сигналов управления тиристорами инвертора
Естественная коммутация тиристоров зависимого инвертора 2 на средних и высоких частотах вращения ротора синхронной машины 1 осуществляется за счёт ЭДС вращения статора, т.е. за счёт реактивной мощности синхронной машины 1. При пуске синхронной машины 1 из неподвижного состояния, что соответствует области нулевой и низких частот вращения ротора синхронной машины, ЭДС вращения статора недостаточно для естественной коммутации тиристоров зависимого инвертора 2, поэтому применяют принудительную коммутацию тиристоров зависимого инвертора 2 за счёт перевода тиристоров выпрямителя 5 в инверторный режим. Работу выпрямителя 5 определяет блок управления тиристорами выпрямителя 6 так, что при отсутствии сигнала на выходе блока формирования импульсов гашения 8 выпрямитель 5 формирует ток в соответствии с воздействием блока регулятора тока 9. Если блок формирования импульсов гашения 8 выдаёт импульсный сигнал, то в течение действия этого сигнала выпрямитель 5 переводится в инверторный режим и его ток прекращается, при этом производится восстановление запирающих свойств тиристоров моста зависимого инвертора 2. Блок формирования импульсов гашения 8 формирует импульсный сигнал гашения по сигналу момента коммутации тиристоров инвертора
Имитатор ротора синхронной машины 15 производит вычисления угла поворота имитатора с учётом сигнала углового ускорения имитатора 
Переключение состояния пересчётного кольца производится по сигналу переключения пересчётного кольца
В техническом решении на фиг. 2 дополнительно учитывается начальное угловое положение ротора синхронной машины перед первой коммутацией тиристоров зависимого инвертора 2, для определения которого может быть использован типовой блок определения начального углового положения ротора синхронной машины 19, применяемый в инженерной практике. Сигнал начального положения ротора синхронной машины
В то же время блоком вычисления начального состояния имитатора 21 по сигналу начального положения ротора синхронной машины 
В техническом решении на фиг. 3 обратная связь по угловому положению ротора синхронной машины 1 осуществляется сигналом переключения пересчётного кольца по обратной связи
Сигнал переключения пересчётного кольца по углу поворота ротора
В техническом решении на фиг. 4 дополнительно учитывается начальное угловое положение ротора синхронной машины перед первой коммутацией тиристоров зависимого инвертора 2, для определения которого может быть использован типовой блок определения начального углового положения ротора синхронной машины 19, применяемый в инженерной практике. Сигнал начального положения ротора синхронной машины
В то же время блоком вычисления начального состояния имитатора 21 по сигналу начального положения ротора синхронной машины
Предложенные технические решения исключают возможные нарушения периодичности коммутаций тиристоров зависимого инвертора и повышают точность определения углового положения ротора синхронной машины, что обеспечивает повышение надёжности пуска синхронной машины. Дополнительный положительный фактор заключается в том, что с ведением функции вычисления угла поворота, имитирующего угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, и сравнения его с заданной уставкой угла появляется возможность осуществлять коммутацию тиристоров зависимого инвертора без обратной связи по угловому положению ротора синхронной машины, что существенно упрощает пусконаладочные работы, которые выполняются с целью проверки правильности подключения силовых, измерительных и управляющих цепей пускового устройства, в состав которого входят выпрямитель и зависимый инвертор, и снижает сроки и затраты на их проведение.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пуска синхронной машины | 2021 |
|
RU2766862C1 |
| Способ пуска вентильного электродвигателя | 1985 |
|
SU1339847A1 |
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| Вентильный электродвигатель | 1984 |
|
SU1257770A1 |
| Вентильный электродвигатель | 1986 |
|
SU1325631A2 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |
| Вентильный двигатель | 1988 |
|
SU1557663A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Устройство для асинхронного пуска и ресинхронизации синхронной машины | 1987 |
|
SU1480073A1 |
| Вентильный электродвигатель | 1985 |
|
SU1336186A1 |
Изобретение относится к электротехнике и может быть использовано для управления синхронной машиной, в частности для управления синхронной машиной в режиме вентильного электродвигателя. Техническим результатом является повышение надёжности пуска синхронной машины. В первом варианте способа пуска синхронной машины, подключённой к сети через последовательно соединённые выпрямитель и зависимый инвертор, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения. Измеряют напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины. Измеряют фазу этого напряжения и сравнивают её с заданной уставкой фазы. Вычисляют угол поворота, имитирующий угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора. Сравнивают его с заданной уставкой угла и осуществляют указанную коммутацию тиристоров зависимого инвертора при достижении вычисляемого угла поворота с заданной уставкой угла или достижении измеряемой фазы напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины с заданной уставкой фазы. Во втором варианте способа пуска указанную коммутацию тиристоров зависимого инвертора осуществляют, если измеряемая фаза напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины не меньше заданной уставкой фазы и определяемый угол поворота ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора не меньше заданной уставкой угла. Или осуществляют в момент достижения вычисляемого угла поворота, имитирующего угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, заданной уставкой угла. 2 н. и 2 з.п. ф-лы, 4 ил.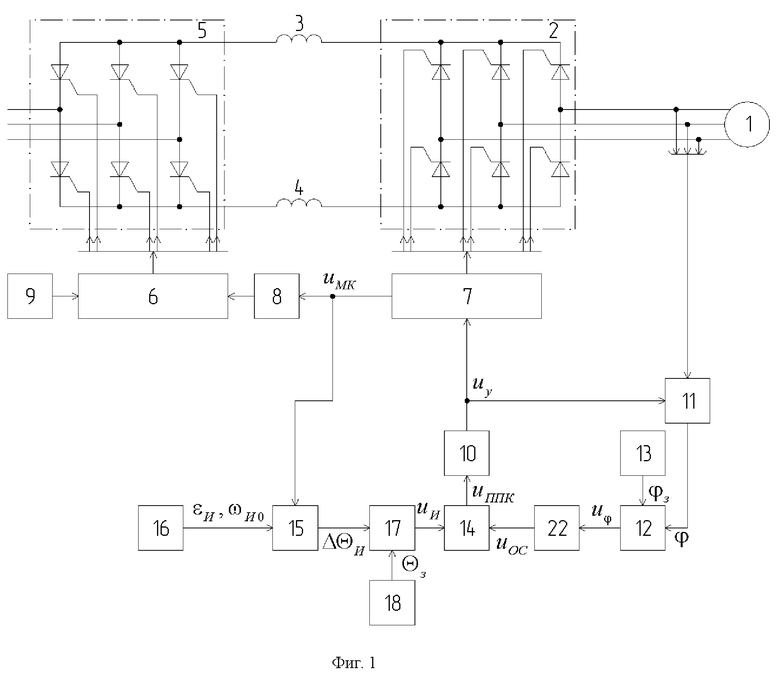
1. Способ пуска синхронной машины, подключённой к сети через последовательно соединённые выпрямитель и зависимый инвертор, заключающийся в том, что, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения, измеряют напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины, измеряют фазу этого напряжения и сравнивают её с заданной уставкой фазы, отличающийся тем, что дополнительно вычисляют угол поворота, имитирующий угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, сравнивают его с заданной уставкой угла и осуществляют указанную коммутацию тиристоров зависимого инвертора при достижении вычисляемого угла поворота с заданной уставкой угла или достижении измеряемой фазы напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины с заданной уставкой фазы.
2. Способ пуска синхронной машины по п. 1, отличающийся тем, что первую коммутацию тиристоров зависимого инвертора осуществляют по определенному начальному угловому положению ротора синхронной машины, а угол поворота, имитирующий перемещение ротора синхронной машины в период между первой и второй коммутациями и тиристоров зависимого инвертора, вычисляют с учётом определенного начального углового положения ротора синхронной машины.
3. Способ пуска синхронной машины, подключённой к сети через последовательно соединённые выпрямитель и зависимый инвертор, заключающийся в том, что, коммутируя тиристоры зависимого инвертора, разгоняют синхронную машину до заданной уставки угловой скорости вращения, измеряют напряжение в необтекаемой током зависимого инвертора фазной обмотке синхронной машины, измеряют фазу этого напряжения и сравнивают её с заданной уставкой фазы, отличающийся тем, что дополнительно вычисляют угол поворота, имитирующий угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, сравнивают его с заданной уставкой угла, отсчитывают время от последней очередной коммутации тиристоров зависимого инвертора, определяют период измеряемого напряжения, вычисляют угол поворота ротора синхронной машины с учётом отсчитываемого времени и определяемого периода измеряемого напряжения, сравнивают его с заданной уставкой угла и осуществляют указанную коммутацию тиристоров зависимого инвертора, если измеряемая фаза напряжения в необтекаемой током зависимого инвертора фазной обмотке синхронной машины не меньше заданной уставкой фазы и определяемый угол поворота ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора не меньше заданной уставкой угла или в момент достижения вычисляемого угла поворота, имитирующего угловое перемещение ротора синхронной машины в период времени между коммутациями тиристоров зависимого инвертора, заданной уставкой угла.
4. Способ пуска синхронной машины по п. 3, отличающийся тем, что первую коммутацию тиристоров зависимого инвертора осуществляют по определенному начальному угловому положению ротора синхронной машины, а угол поворота, имитирующий перемещение ротора синхронной машины в период между первой и второй коммутациями и тиристоров зависимого инвертора, вычисляют с учётом определенного начального углового положения ротора синхронной машины.
| Способ пуска вентильного электродвигателя | 1985 |
|
SU1339847A1 |
| US 2021083602 A1, 18.03.2021 | |||
| СПОСОБ ПУСКА СИНХРОННЫХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096902C1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
| Устройство для определения углового положения ротора вентильного двигателя | 1981 |
|
SU1003261A1 |

