Изобретение относится к электротехнике и может быть использовано для создания систем управления вентильными двигателями без обратной связи- по положению, т.е. без датчика положения ротора.
Известны устройства для определения углового положения ротора вентильного двигателя, в которых в качестве одного из основных элементов выступает датчик положения ротора:, механически связаиный с валом или встроенный в корпус двигателя
Недостатком известных устройств является наличие указанного датчика положения, установка которого на валу машины не всегда возможна и усложняет механическую засть привода, что снижает надежность его работы и ограничивает область применения привода с вентильным двигателем.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство для определения углового положения ротора синхронной машины, якорной обмоткой подключенную к тиристориому преобразователю частоты со звеном постоянного тока, включающему S себя системы управления выпрямителем и инвертором преобразователя и распределитель импульсов системы управления инвертором, а обмоткой возбуждения - к тиристорному возбудителю, содержит датчики выпрямленного тока и тока возбуждения, датчики ЭДС и сумматор, соединенный одним
10 входом с функциональным преобразователем, а выходом - с указателем углового положения ротора. Кроме того, устройство содержит дисковый датчик, связанный с вгшом рото15ра машцны,, статический генератор опорных.импульсов и еще один функциональный преобразователь ..
Недостатком известного устройства является сложность производства
20 измерения углового положения ротора двигателя, требующая на время измерения подключения обмотки возбуждения двигателя к генератору постоянного напряжения, а якорной
25 Обмотки - к входам функциональных преобразователей, что вызывает неудобство при эксплуатации, снижает быстродействие устройства и точность определения углового-псложе
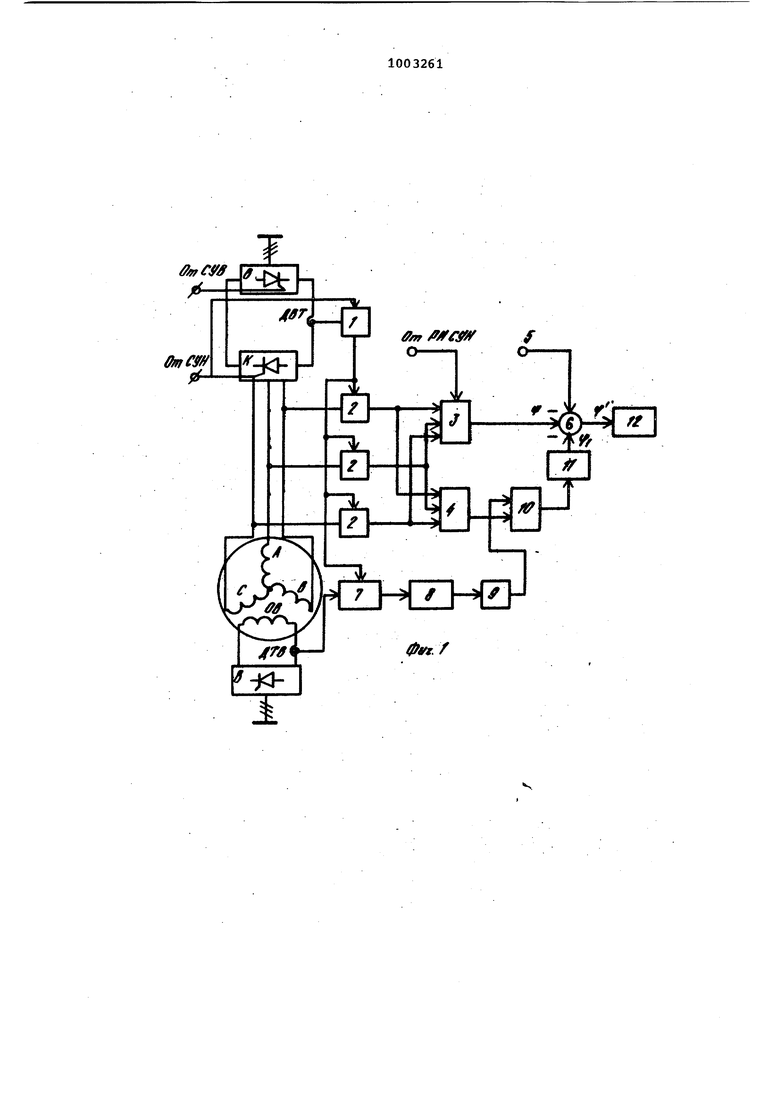
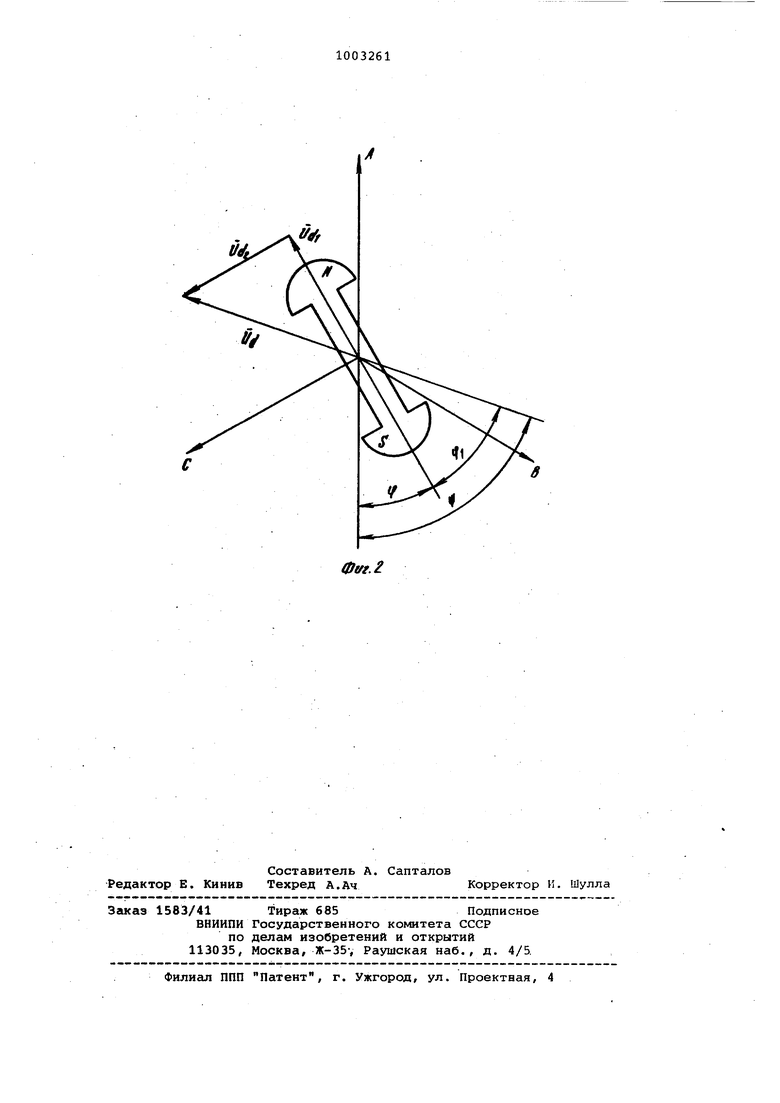
30 ния ротора. Кроме того, наличие дискового датчика, связанного с валом ротора машины, снижает надежность работы устройства и ограничивает его применение для механизмов, где невозможна установка таких датчиков (тяжелые условия работы механизма, связанные с влажностью, запыленностью, вибрацией и т.п., а также отсутствие возможности соединения дат чика с валом ротора двигателя). Цель изобретения - повышение быстродействия и надежности работы устройства. Поставленная цель достигается тем, что в устройство для. определения углового положения ротора вентильного двигателя, содержащее синхронную машину, якорной обмоткой подключенную к тиристорному преобра зователю частоты со звеном постоянного тока, включающему в себя систе мы управления выпрямителем и инверт ром преобразователя и распределител импульсов системы управления инвертором, а обмоткой возбуждения - к тиристорному возбудителю, датчики выпрямленного тока и тока возбуждения, датчики ЭДС и сумматор, соед ненный одним входом с функциональным преобразователем, а выходом - с указателем углового положения ротора, введены цепь из последовательно соединенных нелинейного преобразова теля , служащего для моделирования кривой намагничивания синхронной машины, дифференциатора, пропорционального преобразователя и блока деления, а также вычислительное уст ройство, выходной Сигнал, которого пропорционален значению угла между вектором результирующей ЭДС, наведе ной полем вращающегося ротора, и ос одной из фазных обмоток якоря, трех фазный мостовой выпрямитель, задатчик точки отсчета положения ротора и нуль-орган, причем вход цепи из последовательно соединенных элементов подключен к датчику тока возбуждения, а выход - к функционально му преобразователю, выходной сигнал которого пропорционален арккосинусу входного, второй вход блока деления подключен через трехфазный мостов выпрямитель к датчикам ЭДС, которые также подключены к трем соответству щим входам вычислительного устройст ва, четвертый вход которого подсоединен к распределителю импульсов, а выход - к второму входу .-сумматора, тpetий вход которого соединен с задатчиком точки отсчета положения ротора, кроме того, два входа нульоргана подключены соответственно к датчику выпрямленного тока и к выхо ду системы управления инвертором, а выход нуль-органа подсоединен к вторым входам датчиков ЭДС и нелиней ного преобразователя. На фиг. 1 изображена блок-схема устройства для определения углового положения ротора вентильного двигателя; на фиг. 2 - векторная диаграмма ЭДС вентильного двигателя. Устройство для определения углового положения ротора вентильного двигателя содержит нуль-орган 1, входами подключенный к системе управления инвертором (СУЙ) и к датчику выпрямленного тока (ДВТ.) , датчики 2 ЭДС, подключенные к соответствующим фазам А, В и С якорной обмотки синхронной машины и к выходу нуль-органа 1, выходы датчиков 2. ЭДС подключены к вычислительному устройству 3 и трехфазному мостовому выпрямителю 4, задатчик точки отсчета положения ротора 5, подключенный к третьему входу сумматора б, второй вход которого подсоединен к выходу вычислительного устройства 3, соединенного одним из входов с распределителем импульсов (РИ) СУЙ,последовательно включенные нелинейный преобразователь 7, входы которого подключены, соответственно к датчику тока возбуждения (ДТВ) и. к выходу нуль-органа 1, дифференциатор 8, пропорциональный преобразователь 9 и блок 10 деления, второй вход которого подключен к выпрямителю 4, а выход - к фуикциональному преобразователю 11, выходом подключенного к третьему входу сумматора 6, выход которого соединен с указателем углового положения ротора 12. Устройство для определения углового положения ротора вентильного двигателя предназначено для контро.ля положения ротора при работе двигателя в диапазоне низких частот вращения (до 10% номинальной), т.е. в зоне искусственной коммутации вентилей инвертора. Особенность устройства заключается в дискретном режиiMe его работы, при котором производ:ство необходимых измерений по определению углового положения ротора производится в моменты бестоковых пауз в звене постоянного тока. Устройство работает следунш м образом. Непосредственно перед пуском двигателя, после его возбуждения, производится установка ротора в исходное положение, при котором продольная ось полюсов ротора совпадает с точкой отсчета его углового положения. Установка ротора в исходное положение производится подачей управляющего импульса на вентили выпрямителя,и на выбранную нару вентилей инвертора. После успокоения ротора дается команда на Пуск двигателя и ротор начинает разворач ваться . После прохождения ротором первого тактового интервала в момен перекоммутации якорных обмоток синх ронной машины, работающей в режиме искусственной ком утации вентилей инвертора напряжением выпрямителя, когда сток в звене постоянного тока становится равным нулю и отсутствует управляющий импульс от СУЙ, сраб тывает нуль-орган 1, имеющий на . входе логическую схему И, и включает в работу датчики 2 ЭДС и нелинейный преобразователь 7, Сигнал, пропорциональный величине наведенных ЭДС в фазах якорной обмотки двигателя, поступает с датчиков ЭДС на входы вычислительного устройства 3 и трехфазного выпрямителя 4. Вычислительное устройство 4 по сигналам,поступающим от РИ и СУЙ, производит выбор фазы якорной обмот ки относительно которой определяется положение ротора и направление тока в ней. Затем, в соответствие с выбранной фазой (например, фаза А (фиг. 2), устройство 3 производит вычисление значения угла Н (для фазы А) между осью этой фазы и вектором результирующей ЭДС Ц (фиг. 2), наведенной в якорной обмотке машины полем вращающегося ротора. Вычисление значения угла (для фазы А) в устройстве 3 производится по следующему алгоритму Ф-агсЮ- У У. , ° Г1ид-и -и где Уд, и и и - модули векторов ЭДС, наведенных в соответствующих фазах ft, В и С якорной обмотки маши ны. Сигнал, пропорциональный значению угла Ч с выхода вычислительного устройства 3 поступает на второй вход сумматора 6. Одновременно с датчиками ЭДС вступает в работу и нелинейный преобразователь 7, служащий для моделирования кривой намагничивания синх- ронного двигателя. На вход преобразователя 7 поступает сигнал, пропорционаЛьный току возбуждения двигателя от ДТВ, а с выхода его - сигнал, пропорциональный значению магнитного потока двигателя в момент определения углового положения ротора. Он поступает на вход дифференциатора 8 служащего для определения изменения величины магнитного потока двигателя за время измерения углового положения ротора. Продифференцированный сигнал с выхода 8 поступает на вход пропорционального преобразователя 9, где он преобразуется в сигнал, пропорциональный модулю вектора ЭДС Ug. (совпадающего по направлению с .продольной осью полюсов ротора , (фиг. 2), наводимой в якорный обмотках машины при изменении магнитного потока поля ротора. Сигнсш с выхода преобразователя 9 поступает на первый вход блока 10 деления, на второй вход которого с выхода выпрямителя 4 поступает сигнал Uj , пропорциональный модулю результирующего вектора ЭДС, навоДИМОЙ в якорных обмотках машины. Значение модуля U получается в .результате выпрямления 4-х сигналов, поступающих от датчиков 2 ЭДС. Результирующий сигнал 1)3 /Mj с выхода блока 10 деления поступает на вход функционального преобразователя 11,-выходной сигнал которого пропорционален арккосинусу входного. В результате на выходе преобразовате ля 11 получается сигнал а rccos пропорциональный значению угла между вектором результируйщей ЭДС и вектором ЭДС индукции, наведенньйш в якорных обмотках машины. С выхода функционального преобразователя 11 сигнал поступает на первый вход сумматора б. После алгебраического суммирования в блоке 6 получаем сигнал if M-vp пропорциональный углу между осью выбранной фазной обмотки якоря и продольной осью полюсов ротора. С целью получения наибольших значений пускового момента двигателя и наименьших его колебаний, перекоммутация фаз якорной обмотки должна осуществляться при положениях ротора, соответствующих точкам пересечения линейных ЭДС холостого хода двигателя. А точка пересечения линейных ЭДС холостого хода двигатепя сдвинута относительно оси его фазной обмотки на ТС/6 электрических градусов. Поэтому для согласования , точки ;-отсчета углового положения ротора двигателя с точкой пересече- ния его линейных ЭДС холостого хода, введен в схему задатчик точки отсчета углового положения ротора 5. Кроме , задатчик 5 может быть использован для задания угла опережения управления инвертором (5 . С задатчика 5 сигнал, пропорциональньЛй значению угла , поступает на третий вход сумматора 6. В результате на выходе сумматора 6 получается скорректированный сигнал углового положения ротора относительно выбран-. ной фазы якоря f..VV Vf -TL/6. Сигнгш с:выхода сумматора б поступает на вход указателя углового положения ротора 12.
Выходной сигнал с указателя углового положения ротора может быть заведен в систему программного упра ления пуском вентильного двигателя с целью коррекции управляюЕдих сигналов, задаваемых программным устройством на каждый тактовый шаг прворота ротора двигателя, в соответствии с действительным положением ротора, Это обеспечит надежный пуск и управление вентильным двигателем при работе его в диапазоне частот вращения 0-0,1 номинальной, в пределах которых осуществляется искусственна коммутация вентилей инвертора.
Применение устройст-ва для определения углового положения ротора в вентильных двигателях с синхронными машинами без демпферных обмоток и производство этим устройством необходимых измерений в моменты безтоковых пауз в звене постоянного тока , вентильного двигателя снижают влияние реакции якоря на точность определения углового положения вектора результирующей ЭДС машины, что, соответственно, повьлшает точность определения действительного положения ротора двигателя.
Исключение из схемы устройства для определения углового положения ротора дисковых датчиков, ыеханически связанных с ротором двигателя, повышает надежность работы устройства, по сравнению с базовым объектом в качестве которого принят прототип, а измерение параметров двигателя, требуемых для определения углового положения его ротора, без отключения обмоток машины от вентильного преобразователя повышает быстродействие устройства.
Также улучшаются условия эксплуатации вентильных двигателей с устройствами для определения углового положения ротора и расширяется область их применения. В частности, расширяется область применения вентильных двигателей для механизмов, где невозможна установка датчиков положения, связанных с ротором двигателя, а также для механизмов, работающих р сложных уелоВИЯХ эксплуатации tвлажность, запыленность, вибрация и т.п.), где надежность работы датчиков положения, связанных с ротором двигателя, низкая.
Формула изобретения
ЬЪтройство ДЛЯ определения углового положения ротора вентильного
двигателя, содержащее синхронную машину, якорной обмоткой подключенную к тиристорному преобразователю частоты со звеном постоянного тока, включающему в себя систег /ы управления выпрямителем и инвертором преобразователя и распределитель импульсов системы управления инвертором, а обмоткой возбуждения - к тиристорному возбудителю, датчики выпрямленного тока и тока возбужде-ния, датчики ЭДС и сумматор, соединенный одним входом с функциональным преобразователем, выходной сигна которого пропорционален арккосинусу входного, а выходом - с указателем углового положения ротора, о т л и ч а ю щ е е с я тем, что, с целью повышения быстродействия и надежности устройства в работе, введены цепь из последовательно соединенных нелинейного преобразователя, служащего для .моделирования кривой намагничивания синхронной машины, дифференциатора, пропорционального преобразователя и блока деления, а также-; вычислительное устройство, выходной сигнал которого пропорционален значению угла между вектором результирующей ЭДС, наведенной полем вращающегося ротора, и осью одной из фазных обмоток якоря, трехфазный мостозой выпрямитель, задатчик точки отсчета положения ротора и нуль-орган причем вход цепи из последовательно соединенных элементов подключен к дачику тока возбуждения, а выход - к функциональному преобразователю, второй вход блока деления подключен через трехфазный мостовой выпрямитель к датчикам ЭДС, которые также подключены к соответствующим входам вычислительного устройства, четвертый вход которого подсоединен к распределителю импульсов, а выход - к второму входу сумматора, третий вход которого соединен с задатчиком точки отсчета положения ротора, кроме того, два входа нульоргана подключены соответственно к датчику выпрямленного тока и к выходу системы управления инвертором, а выход нуль-органа подсоединен к вторым входам датчиков ЭДС и нелинейного преобразователя.
Источники информации, принятые во вниЕчание при экспертизе
1.Электропривод и автоматизация промышленных установок. Т. 4,A.M.Мейстель,К.И.НаумыЧева. Электропривод с вентильными двигателями, ВИНИТИ, М., 1974, с. 97-103,
2.Патент ФРГ № 2353594, кл. Н 02 Р 7/62, 1975. ffmCyff 0ifi.f
Ut.
фу1.г
в
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель | 1979 |
|
SU904135A1 |
| Вентильный двигатель | 1980 |
|
SU892594A1 |
| Вентильный электродвигатель | 1981 |
|
SU995216A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
| Вентильный электродвигатель | 1983 |
|
SU1136267A1 |
| Вентильный двигатель | 1988 |
|
SU1557663A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
| Устройство для управления вентильным электродвигателем | 1982 |
|
SU1095321A1 |