Область техники
Предлагаемое изобретение относится к интеллектуальным системам активной безопасности, устанавливаемым с целью отслеживания и анализа окружающей дорожной обстановки на портативные свободно управляемые средства передвижения, обеспечивая информирование о вероятности фронтального столкновения и/или активирование принудительного торможения, полностью исключающего наезд на препятствие.
Уровень техники
Из уровня техники известен скейтборд для одиночного катания, способный определять препятствия на своем пути (см. DE102019119597, кл. A63C17/12, публ. 2021 г.). [1]
Известный скейтборд может быть причислен к категории микротранспорта, перемещение скейтборда осуществляется посредством компактного электрического двигателя.
Рассматриваемое транспортное средство имеет основание, которое обеспечивает опорную поверхность для удержания ног пользователя. Указанное основание имеет, по меньшей мере, два колеса, которые приводятся в движение упомянутым электрическим двигателем.
Ключевой особенностью известного скейтборда [1] является наличие датчика для обнаружения препятствий на пути следования и блок управления, который регулирует рабочие параметры устройства, чтобы избегать столкновения с препятствиями.
В качестве рабочих параметров используются скорость движения и направление движения, при этом лицу, управляющему устройством может быть сделано звуковое или визуальное предупреждение о вероятности столкновения с препятствием (транспортное средство, бордюр, дорожное полотно и с иными параметрами и др.).
Для данного средства перемещения [1] характерно отсутствие кузова и удерживающей опоры для рук, следовательно индивидуальное передвижение на таком устройстве, несмотря на имеющуюся систему безопасности, достаточно опасно для водителя и может приводить к различным рефлекторным действиям, выраженным в виде экстренного торможения или резкого маневрирования в результате полученного сигнала тревоги, что может приводить к аварийным случаям с риском получения травм при падении и/или столкновении с каким-либо препятствием.
Используемый блок управления обрабатывает получаемые от датчика обнаружения препятствий сигналы, и в случае невозможности своевременного реагирования водителя на угрозу столкновения, автоматически подруливаются колеса или происходит принудительное торможение, что вероятно поможет избежать столкновения или снизить последствия такового, однако, такой режим работы гаджета с резкими ускорением и маневрами не гарантирует рядовому пользователю, удержание устойчивого положения без падения.
Следует отметить, что транспортные снаряды такого типа, как [1], оснащенные автоматикой, являются экспериментальными, их эксплуатация в городской среде является небезопасной, их конструкция не имеет элементов поддержки и не адаптирована для сохранения устойчивости положения при маневрировании, поэтому характерные режимные нагрузки относительно безопасно может воспринимать только профессиональный спортсмен на специальной оборудованной для катания спортивной площадке.
Известный и популярный во всем мире вид транспорта - электросамокаты является более безопасным персональным средством передвижения по сравнению со скейтбордами, поскольку в базовых вариантах используется адаптивная рамная конструкция, имеются средство управления направлением движения, а также ножные и ручные тормозные механизмы, что позволяет успешно адаптироваться и использовать данное средство мобильности широким кругом лиц для различных целей (туризм, прогулки, развлечения, рабочие поездки и др.).
Электросамокаты являются довольно удобными для использования, некоторые модели имеют сидения для перемещения в положении “сидя”, такие модели по сути являются гибридными и обладают как признаками самоката, так и признаками велосипеда.
Указанные средства перемещения могут иметь запас хода до 30 км и достигать скорости движения до 40 км/ч, поэтому увеличилось распространение таких устройств в городской среде, в том числе в пешеходных зонах, что создает определенный дискомфорт для последних и подвергает риску получению травм всех участников движения. В этой связи требуются, как административные решения данной проблемы, так и технические, которые, к примеру, ограничивали бы максимальную скорость перемещения таких транспортных средств и не создавали опасности при перемещении пешеходов.
Из уровня техники известен умный самокат, способный определять параметры местности, по которой ему разрешено движение (см. US 2020250975, кл. B62J3/00, публ. 2020 г.). [2]
Известный самокат [2] относится к группе автоматических управляемых транспортных средств, имеющих возможность идентификации дорожной обстановки с последующим определением ее параметров для цели информирования пилота о правовой возможности или невозможности продолжения движения по интересующему участку городской дороги.
Для обозначенной возможности известный самокат [2] содержит процессор, который сконфигурирован так, что имеется возможность определения является ли среда пешеходной дорожкой, по которой разрешено движение средств передвижения такого типа. В результате чего может быть решен вопрос относительной безопасности устройства.
Как было упомянуто данное портативное средство мобильности анализирует окружающее пространство и определяет статус местности, по которой возможно или невозможно с точки зрения городских правил езда, однако, пользоваться или нет такой подсказкой автоматики решает сам пилот, что не исключает человеческий фактор и случаи пренебрежения полученными подсказками или фактическим отключением при эксплуатации такой вспомогательной системы защиты.
Дополнительным недостатком следует считать вероятные ошибки работы машинных систем обработки данных, получая которые происходит сравнение признаков, характеризующих актуальную дорожную обстановку и признаков, заложенных в программном функционале, который в свою очередь при работе может ошибочно, например, из-за плохих погодных условий определить (идентифицировать) тот или иной подвижный или неподвижный дорожный признак и как результат принять неверное решение о пешеходной или транспортной принадлежности дорожного участка, вводя тем самым пилота в заблуждение.
Наиболее близким с точки зрения технической сущности к заявляемому изобретению является электрический самокат, известный из EP3663176, кл. B60L15/20, публ. 2020 г.[3].
Известное техническое решение [3] относится к электрическим двухколесным средствам перемещения типа электроскутера, обладающим возможностью визуального анализа окружающей обстановки для цели обеспечения контролируемого безопасного движения.
Известный электрический самокат [3] включает в себя фотографирующий блок и управляющую часть. Фотографирующий блок соединен с корпусом самоката и расположен так, что внешнее окружение самоката доступно фотографируется. Управляющая часть соединена с корпусом самоката.
Управляющая часть электрически связана с фотографирующим блоком и с колесами средства передвижения.
Управляющая часть управляет приводной системой самоката в соответствии с сигналами от фотографирующего блока, производя при этом контролируемое и безопасное движение скутера с обходом препятствий на пути.
Фотографирующий блок содержит исполнительный элемент и две фото камеры, которые электрически соединены с блоком управления.
Блок управления снабжен датчиком, определяющим начало и окончание фотосъемки.
Конструкция данного электроскутера решает вопрос автоматизации движения самоката, перемещающегося на участке совместно с пешеходами, при этом выбирается безопасная скорость перемещения, которая в зависимости от интенсивности движения увеличивается или уменьшается, а подвижные или неподвижные препятствия объезжаются, что создает относительно безопасную схему движения с приоритетным перемещением пешеходов.
В рассматриваемом варианте конструкция автоматической системы контроля качества движения не является универсальной, поскольку составные компоненты на самом самокате рассредоточены и диагностированы в строго отведенных протестированных местах, и соответственно могут быть качественно работоспособно расставлены только в заводских условиях, что ограничивает область применения известной системы, не позволяя ее применять на других переносных транспортных средствах, к примеру, не требующих удержания равновесного положения пилота.
Дополнительным недостатком системы такого типа следует считать, остающиеся высокими показатели передачи и обработки ошибочных данных, что связано с постоянно меняющимися режимами и условиями эксплуатации, в том числе погодными, в результате чего может происходить искажение поступивших сигналов, которые не проходят дополнительную цифровую нормализацию/обработку и способны активировать команды управления, не соответствующие достоверным фактическим дорожным параметрам.
Раскрытие изобретения
Технической проблемой предлагаемого изобретения является создание обладающего высокими технико-эксплуатационными показателями уличного переносного транспортного средства, обладающего возможностью автоматического отслеживания дорожной обстановки с целью предотвращения травмоопасных аварийных ситуаций.
Техническим результатом предлагаемого изобретения, который решает поставленную техническую проблему является реализация назначения по созданию портативного индивидуального средства перемещения интеллектуальный функционал, которого поддерживает качественное пилотное управление с предупреждением столкновений с подвижными или неподвижными препятствиями на пути следования, чему способствует повышенная точность и устойчивая стабильность при обработке и анализе поступающих данных, характеризующих попутные дорожные условия.
Заданный технический результат и существующая техническая проблема достигаются в результате того, что персональное носимое средство перемещения с системой активной безопасности, предупреждающей столкновения с попутно встречающимися препятствиями содержит силовую установку, средства измерения и тормозную подсистему, которые связаны электрически с интеллектуально-управленческой частью, контролирующей работу имеющейся активной части, производящей в динамическом режиме фото/видеофиксирование дорожной обстановки, при этом данные о дорожной обстановке перед попаданием в интеллектуально-управленческую часть поступают в подготовительную часть, состоящую из нормализирующего цифровые изображения фильтрующего модуля и принимающего обработанные им сигналы модуля стабилизации и позиционирования, в котором происходит дополнительная программная обработка, заключающаяся в корректировке изображений с учетом происходящих в движении смещений и вибраций, при этом указанная интеллектуально-управленческая часть состоит из непосредственно взаимодействующего с упомянутыми силовой установкой, средствами измерения и тормозной подсистемой центрального исполнительного средства, к которому подключены, принимающие информацию от указанной подготовительной части командный блок интеллектуального анализа и блок выявления и распознавания находящихся на пути следования объектов.
По одному из частных вариантов осуществления предлагаемого изобретения используемая активная часть оснащается регистратором, который фиксирует дорожные события.
Согласно предпочтительному варианту осуществления изобретения подготовительная часть оснащается датчиком освещенности, который передает данные в фильтрующий модуль.
По одному из рациональных вариантов осуществления изобретения транспортное средство оснащается датчиком скорости, передающим текущие данные в центральное исполнительное средство.
По одному из допустимых вариантов исполнения транспортного средства оно снабжается приемником сигналов ГЛОНАСС/GPS, передающим текущие данные в центральное исполнительное средство.
Является целесообразным если транспортное средство снабжается модемом, установленным с возможностью взаимного информационного обмена с центральным исполнительным средством.
Допустимо если предлагаемое транспортное средство снабжается модулем WiFi/Bluetooth, осуществляющим обоюдный обмен данными с центральным исполнительным средством.
Представляется предпочтительным если рассматриваемое транспортное средство снабжается устройством вибрационного оповещения пользователя о приближающемся препятствии, как правило данное устройство устанавливается на рулевом участке и передает вибрацию пилоту транспортного средства для своевременного реагирования на возникшие на пути следования препятствия.
По одному из наилучших вариантов осуществления изобретения транспортное средство снабжается устройством звукового оповещения пилота о приближающемся препятствии.
В соответствии с предложенным изобретательским замыслом вниманию предлагается компактное переносное транспортное средство, предназначенное для движения в уличных условиях, которое за счет адаптированной системы активной безопасности способно в настроенном автоматическом режиме распознавать попутные дорожные условия и в режиме движения анализировать поступающие актуальные дорожные данные, что позволяет проводить своевременное информирование пилота о вероятных и возможных опасностях на дороге, а также, в ситуации отсутствия реагирования пилота, осуществлять принудительное автопилотирование, проявляющееся в увеличении и/или снижении скорости движения, полном торможении, и в смене траектории или направления движения если это необходимо для гарантии безопасной эксплуатации, исключающей риск получения травм участниками уличного движения.
Базовой особенностью предлагаемого технического решения, которая реализует заявленное предназначение и заданный технический результат соответственно является разработанная система активной безопасности, адаптированная для использования мелкогабаритными, преимущественно колесными, транспортными средствами, отличающимися компактностью, маневренностью и относительно низкой скоростью передвижения, что является важными факторами для качественной и безопасной езды в условиях городской уличной среды.
Как уже было указано, ключевыми отличительными характеристиками рассматриваемой системы активной безопасности является возможность информирования пилота о надвигающихся препятствиях, а также возможность принудительной активации режима автопилота, обеспечивающего контролируемое автоматикой дорожное действие или совокупность действий, необходимых для оптимального и безопасного преодоления определенного опасного участка пути или целого маршрута, на котором может быть рассредоточено значимое количество объездных стационарных препятствий или хаотично перемещающихся групп пешеходов.
Для цели реализации обозначенных функциональных возможностей изобретения - силовая установка, средства измерения и тормозная система связаны с рассматриваемой системой активной безопасности, которая в свою очередь получая данные от имеющихся средств фото/видеофиксации, управляет, в режиме реального времени, возможностями транспортного средства, допускающими, в том числе автоматический перевод движения в автопилотируемое состояние, благодаря которому достигаются улучшенные ездовые характеристики, отвечающие за своевременное маневрирование, объезд препятствий, увеличение/уменьшение скорости, полную остановку, а также начало движения.
Следует отметить, что согласно представленному авторскому замыслу, техническая составляющая, позволяющая обеспечить создание интеллектуальной транспортной системы активной безопасности с упомянутыми высокими показателями точности и стабильности функционирования заключается в том, что анализирующая зафиксированные данные о дорожной обстановке система активной безопасности имеет интеллектуально-управленческий участок, который состоит из взаимодействующего с силовой установкой, средствами измерения и тормозной подсистемой центрального исполнительного средства, к которому в свою очередь подключены командный блок интеллектуального анализа и блок выявления и распознавания находящихся на пути следования объектов, при этом важно, что указанные данные перед попаданием в указанный управленческий участок поступают в своего рода подготовительную часть, где происходит нормализация изображений, их корректировка, стабилизация и позиционная программная обработка.
Таким образом, представленное выше конструкторское выполнение заявляемого персонального носимого средства перемещения с системой активной безопасности, предупреждающей столкновения с попутно встречающимися препятствиями, с учетом его характеристик и технических особенностей, образует совокупность признаков достаточных для решения обозначенной технической проблемы и соответственно достижения заданного технического результата, заключающегося в реализации назначения по созданию портативного индивидуального средства перемещения интеллектуальный функционал, которого поддерживает качественное пилотное управление с предупреждением столкновений с подвижными или неподвижными препятствиями на пути следования, чему способствует повышенная точность и устойчивая стабильность при обработке и анализе поступающих данных, характеризующих попутные дорожные условия.
Краткое описание чертежей
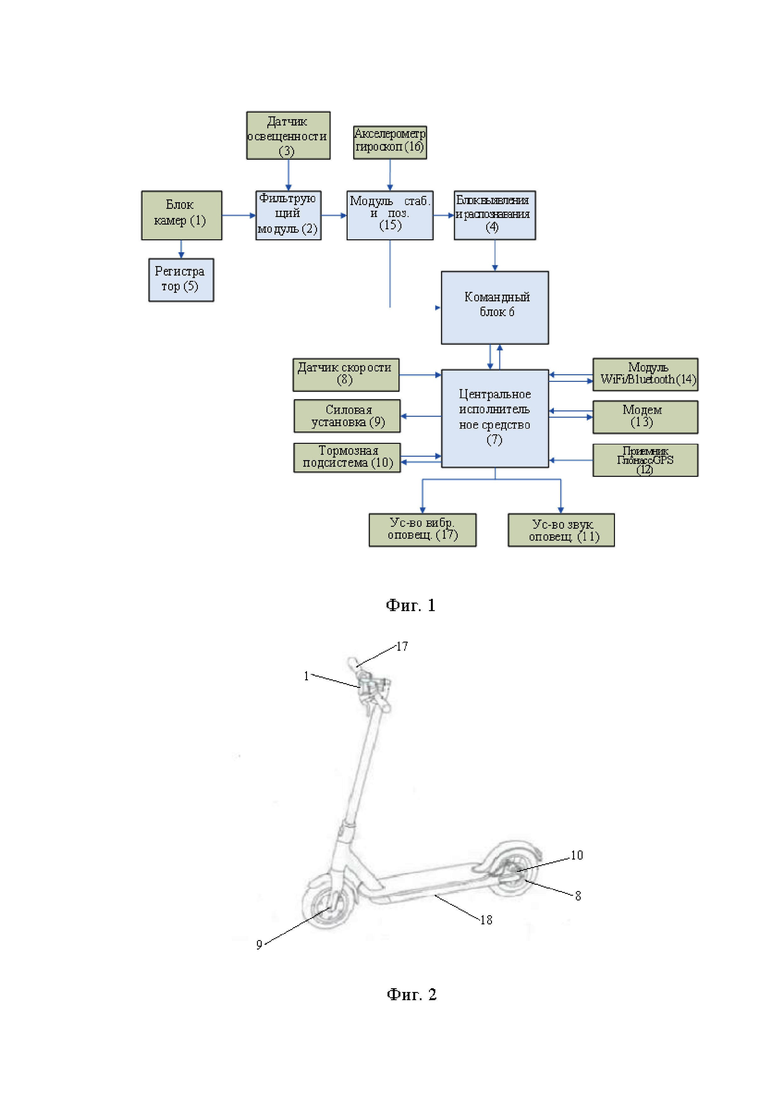
На фиг.1 представлен вариант структурной схемы системы активной безопасности, установленной на портативном транспортном средстве;
На фиг.2 представлено портативное транспортное средство в виде самоката с установленной системой активной безопасности;
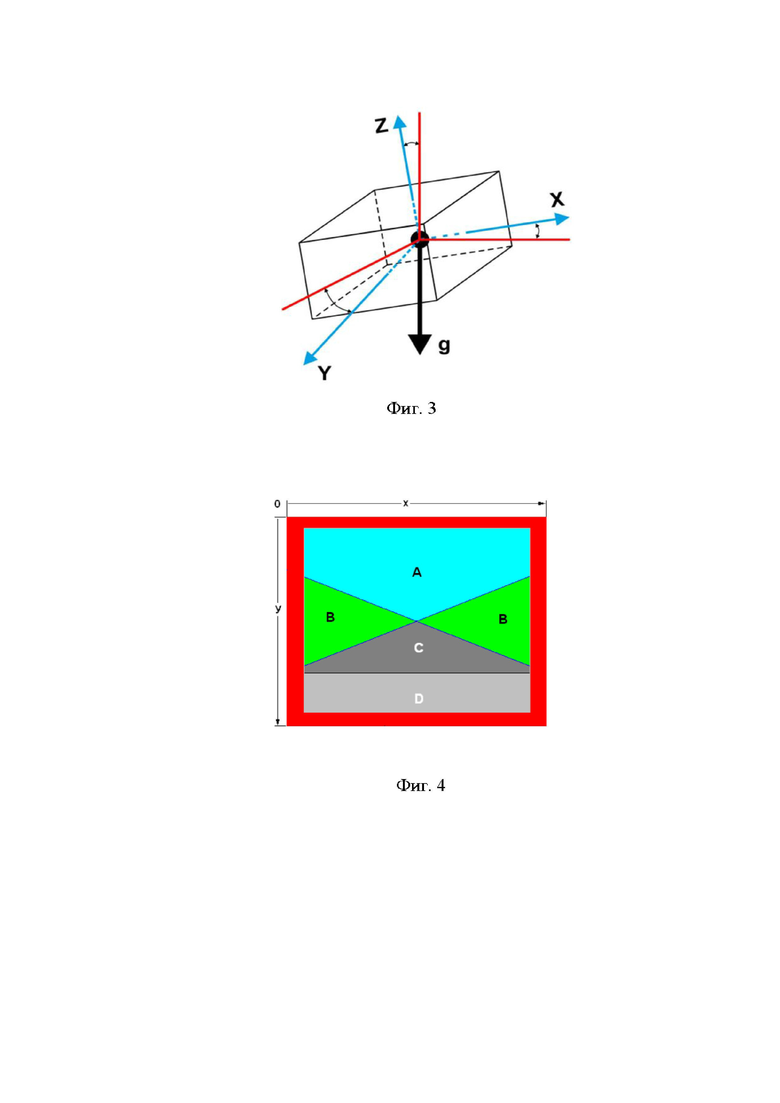
На фиг.3 представлены проекции вектора силы тяжести g на оси X, Y и Z при проведении корректировки и обработки фиксируемых данных о дорожной обстановке;
На фиг.4 представлена схема разбивки фиксируемых данных, а именно изображения на отсеки с целью проведения аналитической обработки.
Осуществление изобретения
Предлагаемое изобретение поясняется конкретным примером выполнения и реализации, которые, однако, не являются единственно возможными, но наглядным образом демонстрируют достижение указанной совокупностью существенных признаков заданного технического результата, а также решение существующей технической проблемы.
На фиг.1 - фиг.2 представлены, следующие части и элементы предлагаемого персонального носимого средства перемещения с системой активной безопасности:
1 - блок камер;
2 - фильтрующий модуль;
3 - датчик освещенности;
4 - блок выявления и распознавания;
5 - регистратор;
6 - командный блок;
7 - центральное исполнительное средство;
8 - датчик скорости;
9 - силовая установка;
10 - тормозная подсистема;
11 - устройство звукового оповещения;
12 - приемник Глонасс/GPS;
13 - модем;
14 - модуль WiFi/Bluetooth;
15 - модуль стабилизации и позиционирования;
16 - акселерометр-гироскоп;
17 - устройство вибрационного оповещения;
18 - аккумуляторный блок.
На фиг.3 - фиг.4 показаны, следующие обозначения, используемые при описании особенностей подготовки и обработки данных о дорожной обстановке:
A, B, C, D - сектора разделенного изображения;
X, Y, Z - оси измерения системы координат;
g - направление силы тяжести;
o - начало координат.
И так, персональное носимое средство перемещения с системой активной безопасности, предупреждающей столкновения, с попутно встречающимися препятствиями, содержит силовую установку 9, средства измерения и тормозную подсистему 10. Перечисленные компоненты связаны электрически с интеллектуально-управленческой частью, контролирующей работу имеющейся активной части, которая производит в динамическом режиме посредством своего блока камер 1 фиксирование дорожной обстановки. Также указанная активная часть оснащена регистратором 5.
Данные о дорожной обстановке перед попаданием в указанную интеллектуально-управленческую часть поступают в подготовительную часть. Подготовительная часть условно состоит из нормализирующего цифровые изображения фильтрующего модуля 2 и принимающего обработанные им сигналы модуля стабилизации и позиционирования 15, при этом в последнем происходит дополнительная программная обработка, которая заключается в корректировке изображений с учетом происходящих в движении смещений и вибраций. Также следует отметить, что рассматриваемая подготовительная часть оснащена датчиком освещенности 3, который передает данные в фильтрующий модуль 2, кроме того подготовительная часть имеет акселерометр-гироскоп 16, отслеживающий опасные наклоны транспортного средства и передающий показания в блок стабилизации и позиционирования 15.
Интеллектуально-управленческая часть, как таковая, состоит из непосредственно взаимодействующего с упомянутыми силовой установкой 9, средствами измерения и тормозной подсистемой 10 центрального исполнительного средства 7, к которому подключены, принимающие информацию от указанной подготовительной части командный блок интеллектуального анализа 6 и блок выявления и распознавания 4 находящихся на пути следования объектов (препятствий).
Система активной безопасности транспортного средства снабжена датчиком скорости 8, который имеет возможность передачи текущих данных в центральное исполнительное средство 7.
Система активной безопасности транспортного средства снабжена приемником сигналов ГЛОНАСС/GPS 12, который передает текущие данные в центральное исполнительное средство 7.
Система активной безопасности транспортного средства снабжена модемом 13, установленным с возможностью взаимного информационного обмена с центральным исполнительным средством 7.
Система активной безопасности транспортного средства снабжена модулем WiFi/Bluetooth 14, осуществляющим обоюдный обмен данными с центральным исполнительным средством 7.
Система активной безопасности транспортного средства снабжена устройством вибрационного оповещения пилота 17 о приближающемся препятствии.
Система активной безопасности транспортного средства снабжена устройством звукового оповещения плота 11 о приближающимся препятствии.
Осуществляется предлагаемое носимое средство перемещения с системой активной безопасности, следующим образом.
Предлагаемое носимое средство перемещения, как правило, представляет из себя электросамокат, электровелосипед или скейтборд с электрической силовой установкой 9. Перечисленные средства перемещения являются компактными, и как правило, не имеют возможности перемещения с высокой скоростью, которая собственно в большинстве случаев не превышает 40 км/ч. Перечисленные особенности, заключающиеся, в частности, в компактности и невысокой скорости перемещения обуславливают успешное сочетание с системой активной безопасности, которая согласно представленным конструктивным особенностям реализует корректно и в полной мере свой функционал, как раз с транспортными средствами компактными, преимущественно переносными и не имеющими возможность развития скорости, превышающей упомянутую, поскольку в случае перемещения транспортного средства с превышением 40 км/ч необходимо использовать автоматику иной архитектуры, подразумевающей использование дорогостоящих компонентов, в частности, так называемых лидаров.
Во время управляемого движения компактного транспортного средства, например, электросамоката данные, полученные с блока камер 1, который всегда направлен по направлению движения фиксируются в регистраторе 5 (фиксация в регистраторе 5 может и не происходить, поскольку данный блок опциональный и устанавливается в зависимости от комплектации). Вместе с тем, полученные данные передаются на обработку в фильтрующий модуль 2 подготовительной части. Фильтрующий модуль 2 производит нормализацию и обработку полученных данных в виде изображений, учитывая при необходимости “показатели яркости на улице”, которые могут быть получены посредством датчика освещенности 3. После так называемого выравнивания яркости изображения производится конвертация изображения во внутреннюю карту цветов размером 226 цветов, карта цветов хранит для каждого элемента, такие показатели, как тон, номер цвета, яркость цвета, как правило в диапазоне от 0-100.
Впоследствие нормализованные (конвертированные) изображения передаются далее в модуль стабилизации и позиционирования 15 подготовительной части. Дело в том, что портативные транспортные средства (самокат, велосипед, скейтборд) в процессе движения сильно подвержены наклонам и скачкам в вертикальном направлении, которые существенно влияют на качество получаемой визуальной информации, а также скорость обработки данных. Данное обстоятельство приводит к постоянной перекалибровке “систем анализа изображений”.
Собственно для решения этой проблемы и предназначен упомянутый модуль стабилизации и позиционирования 15, который имеет возможность программной стабилизации изображения, а также использования акселерометра-гироскопа 16 для повышенной точности обработки. В данном модуле происходит выравнивание изображений с учетом наклона и изменения положения по вертикали транспортного средства. Т.е. на основании полученных от акселерометра-гироскопа 16 данных происходит компенсация изменения угла наклона и перемещения по оси Z. Акселерометр-гироскоп 16 непрерывно отслеживает уровень наклона транспортного средства через вычисление проекции вектора силы тяжести g на оси измерения X, Y и Z. При этом изменение ускорения по оси Z позволяет определить вертикальное перемещение транспортного средства (см. фиг.3).
Модуль стабилизации и позиционирования 15 хранит в своей памяти данные о 6-10 контрольных линиях, которые были рассчитаны на прошлом кадре и используются для точного определения текущего наклона. Данный блок также хранит последовательность из 5-ти прошлых наборов контрольных линий с шагом в 1 секунду.
Следует отметить, что использование данного модуля (15) также существенно ускоряет и упрощает проводимые вычислительные операции.
Далее блок выявления и распознавания 4 находящихся на пути следования объектов, получая данные производит распознавание, а также классификацию указанных объектов. Данные о классифицированных объектах поступают далее в командный блок 6, который также принимает обработанные данные, исходящие от модуля стабилизации и позиционирования 15.
Данные о текущей скорости движения транспортного средства поступают от датчика скорости 8 и/или от приемника ГЛОНАСС/GPS (12) в центральное исполнительное средство 7, в котором обрабатываются эти сведения и передаются в последствии в командный блок 6. Датчик скорости 8 и приемник ГЛОНАСС/GPS (12) являются опциональными и могут быть установлены как вместе, так и по отдельности заменяя друг друга.
Информационные данные об активации движения и нажатии на педаль тормоза тормозной подсистемы 10 поступают в центральное исполнительное средство 7, обрабатываются (фильтруются) и передаются впоследствие в командный блок 6 с целью проведения дальнейшего анализа.
При этом, следует детально пояснить, что блок выявления и распознавания 4 в первую очередь вычисляет контрольные линии по границе объектов, которые расположены в секторе А, т.к. их положение должно минимально измениться в течении 1 секунды движения. Далее выбираются контрольные линии по границе объектов, расположенных в секторе В. Если не удалось сформировать достаточное количество контрольных линий, то рассматривается сектор С.Сектор D не используется для выделения контрольных линий, т.к. объекты в нем наиболее близки к текущему положению портативного транспортного средства и подвержены максимальному изменению (см. фиг.4).
При анализе дорожной ситуации в секторе A - рассматриваются небо, тучи, солнце, строения, в секторе B - рассматриваются удаленные здания, деревья, в секторе C - рассматриваются объекты по направлению движения, а в секторе D - рассматриваются ближние объекты (не используется) (см. фиг.4).
Для наглядности (см. фиг.4) красным цветом выделена часть изображения, которая может быть потеряна при компенсации наклона и перемещения по оси Z. Если на изображении не выявлены объекты и соответственно контрольные линии, то в виде таковых выбираются границы наиболее ярких объектов в центре изображения на пересечении секторов А, В, С.
Контрольная линия хранит в себе информацию о координатах x_start, y_start, x_end, y_end и цвете линии. Контрольные линии не могут быть наклонными, для каждой из контрольных линий верно утверждение x_start=x_end или y_start=y_end. Контроль совпадений выполняется через сравнение разницы средних яркостей по длинной стороне линии:
dL(x-1) и dL(x+1) для горизонтальной линии;
dL(y-1) и dL(y+1) для вертикальной линии.
Необходимо учитывать, что контрольная линия может иметь длину от 5 до 10 точек.
Вместе с тем модуль стабилизации и позиционирования 15 на основании вычисленного угла поворота транспортного средства и изменении положения по оси Z производит выборку данных по координатам контрольных линий в виде прямоугольника с координатами (x_start-5, y_start-5, x_end+5, y_end+5) для нахождения контрольных линий в полученном изображении. В случае если совпали 50% и более контрольных линий, то преобразовываются все изображения и результат передается в блок выявления и распознавания 4. В случае если не удалось найти совпадения, то проверяются на совпадения контрольные линии из последовательности наборов контрольных линий за предшествующие 5 секунд. В случае, если все проверки дали точность ниже 50%, то цепочка выделенных объектов и контрольных линий обнуляется и начинается с текущих данных. Если системе не удается выстроить рабочую цепочку в течении 40 секунд, то в этом случае требуется проверка устройства на работоспособность.
Преобразование входного изображения с учетом угла поворота и изменения положения по оси Z заключается в том, что для каждого ряда на изображении вводится коэффициент смещения относительно y=0. Эти коэффициенты рассчитываются на этапе разработки и хранятся в памяти программы в виде таблицы для углов наклона относительно 90° с диапазоном от -30° до +30°.
Успешно нормализованные и выровненные изображения в модуле стабилизации и позиционирования 15 позволяют значительно ускорить определение положения уже обработанных/выделенных ранее объектов и определить в какой части появился новый объект за счет контроля изменения среднего значения цвета dColor(bx,by) для каждого из прямоугольников размером 64 x 32 точки, на которые было разделено изображение. При этом bx - это индекс блока по оси “x” изображения, а by - индекс блока по оси “y” изображения. На основании выделенных объектов формируются новые контрольные линии по правилам, описанным выше.
В блоке выявления и распознавания 4 происходит выделение объектов, используемых при дальнейшей аналитической обработки: небо, дорога, машины, люди, препятствия и т.п.
Командный блок 6 на основании полученных данных классифицированных объектов полученных от блока выявления и распознавания 4, данных о текущей скорости движения полученных от датчика скорости 8 и/или приемника ГЛОНАСС/GPS (12), данных о степени давления на педаль тормоза тормозной подсистемы 10, а также данных об угле наклона транспортного средства, полученных от блока стабилизации и позиционирования 15, определяет следующие параметры:
- наличие препятствий по направлению движения, их количество и относительное расстояние до препятствий с течением времени;
- изменение положения руля, поворот, по последовательному смещению изображения в правую или левую сторону;
- факт торможения в текущий момент времени, определяемый по динамике изменения нажатия на рычаг или педаль тормозной подсистемы 10;
- динамику скорости движения, манеру разгона и торможения, свойственную для конкретного пользователя;
- опасные углы наклона транспортного средства при движении.
Вместе с тем, командный блок 6, используя вычисленные параметры производит анализ с принятием решения и расчет вероятности возникновения, следующих ситуаций:
- расстояние до препятствия сокращается, а пилот не предпринимает попыток произвести торможение. В этом случае подается сигнал на силовую установку 9 и тормозную подсистему 10 для плавного торможения, при этом генерируется звуковой сигнал через устройство звукового оповещения 11 и возможно сигнал вибрационного оповещения, передаваемый пользователю посредством устройства вибрационного оповещения 17;
- по ходу движения транспортного средства обнаружена высокая плотность пешеходов. В этом случае ограничивается максимальная скорость движения через центральное исполнительное средство 7;
- по направлению движения препятствий не обнаружено. В этом случае снимаются ограничения на максимальную скорость движения через центральное исполнительное средство 7;
- возможен переворот транспортного средства. В этом случае ограничивается максимальная скорость движения через центральное исполнительное средство 7.
Дополнительно следует подчеркнуть, что опциональное наличие модема 13 и приемника ГЛОНАСС/GPS 12 позволяет контролировать местоположение средства перемещения, задавать для него разрешенную зону использования и при необходимости блокировать его работу удаленно.
Опциональный модуль WiFi/Bluetooth 14, а также регистратор 5 позволяют записывать видео передвижения транспортного средства и выгружать их в сеть интернет.
Опциональные устройства вибрационного оповещения 17 и звукового оповещения 11 являются важными функциональными элементами и могут предупреждать пилота о необходимости обратить внимание на определенное событие во время пути или техническое состояние транспортного средства.
Предлагаемое техническое решение может быть успешно использовано в качестве индивидуального средства перемещения, предназначенного для деловых поездок, прогулок, занятий спортом и туристических мероприятий.
Изобретение относится к области машиностроения, в частности к персонально носимым средствам перемещения. Средство перемещения содержит систему активной безопасности, предупреждающей о попутно встречающихся препятствиях. Средство перемещения содержит силовую установку, средства измерения и тормозную подсистему, которые связаны электрически с интеллектуально-управленческой частью. Интеллектуально-управленческая часть контролирует работу активной части, производящей в динамическом режиме фото/видеофиксирование дорожной обстановки. Данные о дорожной обстановке перед попаданием в интеллектуально-управленческую часть поступают в подготовительную часть. Подготовительная часть состоит из нормализирующего цифровые изображения фильтрующего модуля и принимающего обработанные им сигналы модуля стабилизации и позиционирования. Достигается повышение стабильности перемещения за счет повышенной точности обработки данных о дорожной обстановке. 9 з.п. ф-лы, 4 ил.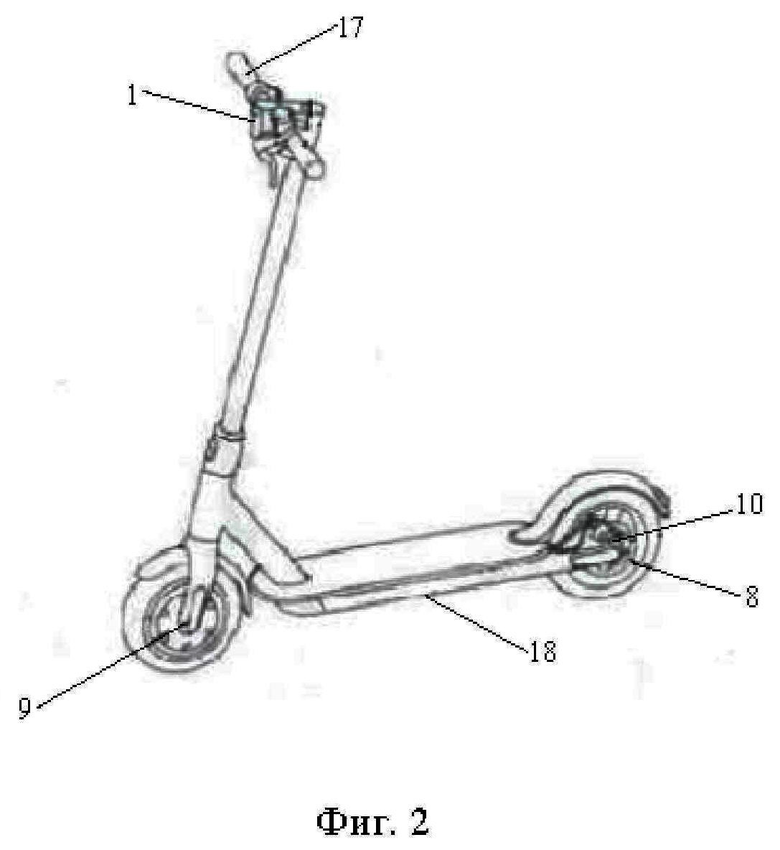
1. Персональное носимое средство перемещения с системой активной безопасности, предупреждающей столкновения с попутно встречающимися препятствиями, содержащее силовую установку, средства измерения и тормозную подсистему, которые связаны электрически с интеллектуально-управленческой частью, контролирующей работу имеющейся активной части, производящей в динамическом режиме фото/видеофиксирование дорожной обстановки, отличающееся тем, что данные о дорожной обстановке перед попаданием в интеллектуально-управленческую часть поступают в подготовительную часть, состоящую из нормализирующего цифровые изображения фильтрующего модуля и принимающего обработанные им сигналы модуля стабилизации и позиционирования, в котором происходит дополнительная программная обработка, заключающаяся в корректировке изображений с учетом происходящих в движении смещений и вибраций, при этом указанная интеллектуально-управленческая часть состоит из непосредственно взаимодействующего с упомянутыми силовой установкой, средствами измерения и тормозной подсистемой центрального исполнительного средства, к которому подключены принимающие информацию от указанной подготовительной части командный блок интеллектуального анализа и блок выявления и распознавания находящихся на пути следования объектов.
2. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что активная часть оснащена регистратором, фиксирующим дорожные события.
3. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что подготовительная часть оснащена датчиком освещенности, который передает данные в фильтрующий модуль.
4. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что оно снабжено датчиком скорости, передающим текущие данные в центральное исполнительное средство.
5. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что оно снабжено приемником сигналов ГЛОНАСС/GPS, передающим текущие данные в центральное исполнительное средство.
6. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что оно снабжено модемом, установленным с возможностью взаимного информационного обмена с центральным исполнительным средством.
7. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что оно снабжено модулем WiFi/Bluetooth, осуществляющим обоюдный обмен данными с центральным исполнительным средством.
8. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что оно снабжено устройством вибрационного оповещения пользователя о приближающемся препятствии.
9. Персональное носимое средство перемещения с системой активной безопасности по п. 8, отличающееся тем, что устройство вибрационного оповещения установлено на рулевом участке и передает вибрацию пилоту.
10. Персональное носимое средство перемещения с системой активной безопасности по п. 1, отличающееся тем, что оно снабжено устройством звукового оповещения пилота о приближающемся препятствии.
| DE 102019119597 A1, 21.01.2021 | |||
| МОТОРНЫЙ ТРАНСПОРТНЫЙ СКУТЕР | 2016 |
|
RU2709729C1 |
| Способ и устройство для управленния самоуравновешивающимся транспортным средством | 2016 |
|
RU2673203C2 |

