Изобретение относится к области безопасности движения транспортных средств и может быть использовано для полного исключения или существенного уменьшения последствий от столкновения транспортных средств при движении в попутном направлении в ситуации нехватки тормозного пути у заднего транспортного средства при торможении перед впереди стоящим или останавливающимся транспортным средством.
Большинство водителей в условиях отсутствия в управляемых ими транспортных средствах современных систем помощи водителю, таких как ADAS (Advanced driver-assistance systems - усовершенствованная система помощи водителю), автоматического пилотирования и контроля дорожной ситуации самостоятельно оценивают безопасную дистанцию перед своим транспортным средством и сами выбирают режим торможения перед останавливающимся или уже стоящим транспортным средством. Особенно часто это приходится делать перед перекрестками на красный сигнал светофора или перед пешеходными переходами. Неточный выбор точки начала торможения и субъективный учет скоростного режима, тормозных характеристик транспортного средства, погодных условий и дорожного покрытия может привести к столкновению с транспортным средством, находящимся впереди. Наезд сзади - самый распространенный вид аварий. Крайне редкими являются случаи, когда водитель переднего транспортного средства, имея большой опыт вождения, визуально контролирует обстановку сзади своего транспортного средства. Предполагая возможный наезд сзади из-за нехватки тормозной дистанции останавливающегося сзади транспортного средства, такой водитель, перестраховываясь, отпускает тормоза и перемещает свой автомобиль вперед, оставляя при торможении своего транспортного средства расстояние перед впереди стоящим транспортным средством.
Современные системы полуавтоматического или полностью автоматического пилотирования транспортных средств на дорогах общего пользования имеют достаточно большой арсенал функций, помогающих водителю избегать столкновения с транспортным средством спереди. Они контролируют дистанцию до впереди движущегося транспортного средства и повторяют скоростной режим переднего транспортного средства, что в свою очередь полностью исключает попутное столкновение. Среди известных систем - это адаптивный круиз контроль (АСС - Adaptive Cruise Control). В перечень систем также можно включить систему автоматического торможения, имеющую различные фирменные названия у авто-производителей, суть которых заключается в автоматическом торможении транспортных средств при обнаружении препятствия спереди (транспортные средства, пешеходы или животные). Все системы работают на основе современных технологий, таких как Радар (Radar - Radio detection and ranging), Лидар (Lidar - Light Detection and Rangin), камеры и ультразвуковые датчики. (http://systemsauto.ru/active/acc.html).
В настоящее время наиболее известен способ предупреждения и сокращения последствий от неизбежного столкновения сзади, который реализован в системе Rear Collision Warning (RCW) от Volvo. Согласно этому способу рассчитывают скорость и направление автомобиля, следующего сзади, и при опасности столкновения предупреждают водителя этого автомобиля частыми мигающими сигналами аварийных фар. При невозможности избежать столкновения автоматически подтягивают преднатяжители ремней безопасности передних сидений, изменяют угол наклона спинок сидений, чтобы удержать пассажиров и водителя на месте и свести к минимуму вероятность травм. Если же наезд сзади угрожает автомобилю, когда он стоит на месте, активируют тормоза автомобиля, чтобы снизить ускорение при движении автомобиля вперед от удара сзади. (https://quto.ru/volvo/xc90/ii/suv5d/features/11409); (https://www.volvocars.com/ru/support/manuals/xc90/2017w46/podderzhka-voditelya/rear-collision-warning/rear-collision-warning).
Наиболее близким к предлагаемому техническому решению является способ ухода от попутного столкновения, реализованный в системе аварийного рулевого управления (Emergency Steer Assist, ESA). Данный способ применяют в случае, когда уже пройдена граница торможения и экстренное безаварийное торможение уже невозможно, тогда автоматически производят аварийный поворот автомобиля. Способ аварийного рулевого управления реализован на базе существующих систем автомобиля, таких как адаптивный круиз-контроль (АСС), видеокамер и др. Информацию от датчиков, установленных на автомобиле, передают в электронный блок управления и анализируют дорожную ситуацию, при необходимости принимают решение об активации аварийного поворота и формируют управляющие команды на исполнительные устройства. В этом способе при недостаточности дистанции тормозного пути транспортное средство резко направляют (выворачивают руль) в сторону соседней свободной полосы. (http://systemsauto.ru/active/emergency_steer_assist.html).
Несмотря на то, что известный способ позволяет избежать наезда сзади на впереди стоящее транспортное средство из-за нехватки дистанции тормозного пути для полной безаварийной остановки, недостатком этого способа являются невозможность использования его в плотном городском потоке и на узких дорогах. Также способ основан на сложном алгоритме действий, позволяющем использовать его только при наличии специальных свободных разделительных полос, редко встречающихся в реальных дорожных условиях.
Задачей изобретения является создание дополнительного тормозного пути для сзади движущегося транспортного средства для его полной безаварийной остановки в случае его вероятного столкновения со стоящим или останавливающимся транспортным средством, находящимся перед ним.
Технический результат заключается в повышении безопасности движения транспортных средств, движущихся по одной полосе и останавливающихся друг за другом в ситуациях нехватки тормозной дистанции между ними для безаварийной остановки или сближения из-за разности скоростей в потоке.
Поставленная задача решается тем, что в способе предотвращения столкновения транспортных средств на стоящем или останавливающемся транспортном средстве измеряют дистанцию и скорость сближения с ним сзади движущегося и тормозящего транспортного средства, вычисляют ускорение торможения и прогнозируют его тормозной путь до полной безаварийной остановки сзади, в случае нехватки длины тормозного пути сравнивают ее величину со свободным расстоянием перед стоящим или останавливающимся транспортным средством и, в случае неизбежного наезда сзади, обеспечивают автоматическое перемещение стоящего или останавливающегося транспортного средства вперед на возможное в данной дорожной ситуации безопасное расстояние.
Реакция человека на опасность непредсказуема, в то время как автоматическое перемещение транспортного средства вперед на максимально возможное в данной дорожной ситуации безопасное расстояние позволяет с максимальной оперативностью избежать аварийную ситуацию и тем самым повысить безопасность движения транспортных средств, движущихся по одной полосе и останавливающихся друг за другом.
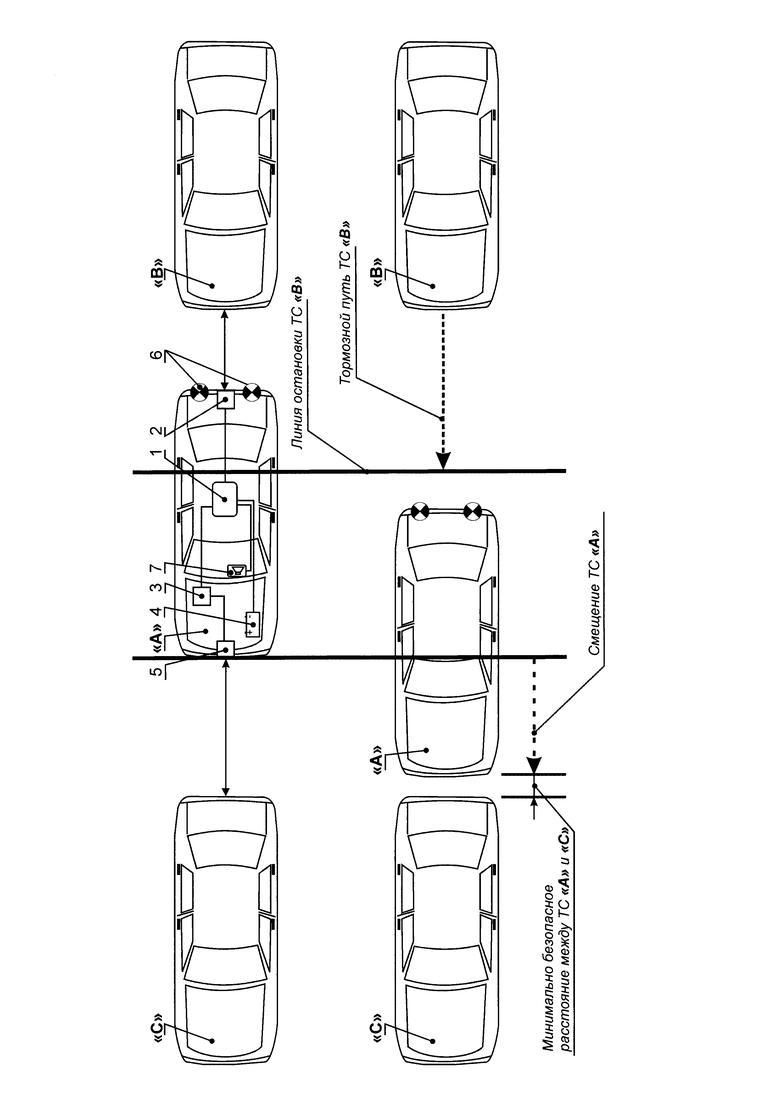
Изобретение поясняется примером, изображенным на схеме, на которой показано приближение с вероятным столкновением к стоящему или останавливающемуся транспортному средству «А» сзади движущегося и тормозящего транспортного средств «В», длина его тормозного пути, а также расстояние, на которое может переместиться вперед транспортное средство «А» для создания дополнительного тормозного пути движущемуся сзади и тормозящему транспортному средству «В». На схеме показано транспортное средство «С», находящееся перед транспортным средством «А», в качестве препятствия, относительно которого в случае нехватки длины тормозного пути сравнивают ее величину со свободным расстоянием перед стоящим или останавливающимся транспортным средством. На практике перед транспортным средством «А» может находиться не обязательно транспортное средство «С», но и, например, пешеход или какие-либо препятствия, устанавливающие жесткие ограничения, связанные с безопасностью других участников дорожного движения.
Способ реализован в устройстве для предотвращения столкновения транспортных средств, движущихся по одной полосе и останавливающихся друг за другом.
Устройство состоит из блока управления 1, установленного на транспортном средстве «А», датчика 2 установленного на задней части транспортного средства «А» для измерения расстояния до транспортного средства «В». В качестве датчика может быть использован прибор измерения расстояния до объекта различного типа (Радар, Лидар или др.), имеющий возможность измерить расстояние до объекта и фиксировать его приближение и удаление для вычисления относительной скорости (сближения или удаления), необходимой для вычисления ускорения торможения. Блок управления 1 состоит из различных электронных элементов, собранных в одном корпусе с целью обработки входящих и выработки исходящих управленческих или информационных сигналов, передающихся в блок управления автопилотом или адаптивным круиз - контролем 3. Блок 1 подключен к электросети транспортного средства 4 и к блоку 3. К блоку 1 подключен датчик 2. К блоку 3 подключены датчики 5, определяющие расстояние до транспортного средства «С», находящегося перед транспортным средством «А». Транспортное средство «А» снабжено источниками свечения стоп-сигналов 6 и устройством оповещения 7, установленным в его кабине для оповещения водителя световым и/или звуковым сигналом.
Устройство работает следующим образом: На транспортном средстве «А» блок управления 1, подключенный к электросети 4 и к штатному блоку управления автопилотом или адаптивным круиз - контролем 3, принимает в интервальном режиме (зависит от возможностей датчика) от датчика 2 информацию о дистанции до транспортного средства «В», обрабатывает ее и в соответствии с программой определяет скорость сближения с ним и ускорение торможения и прогнозируют его тормозной путь до полной безаварийной остановки сзади и, на основании полученной информации вычисляет вероятность наезда сзади из-за нехватки длины тормозного пути. Функция включается в момент начала торможения и свечения стоп-сигналов 6 транспортного средства «А». Датчики 5, подключенные к штатному блоку 3, определяют расстояние до транспортного средства «С». После начала торможения транспортного средства «А» блок управления 1 после обработки информации от датчика 2 сравнивает данные вычисления длины тормозного пути транспортного средства «В» с дистанцией до него сзади. Если вычисленная блоком 1 длина тормозного пути превышает расстояние до транспортного средства «В» и вероятность наезда сзади обозначается как «ДА», то информация поступает в блок 3 для обработки полученного сигнала в управляющий, воздействующий на органы управления транспортным средством «А» с целью перемещения его вперед, без выключения стоп-сигналов 6, на минимально безопасное расстояние до транспортного средства «С».
Блок 3 определяет это расстояние и длину возможного перемещения на основании информации, полученной от датчиков 5. При этом, в случае ответа «ДА», в кабине транспортного средства «А», с целью информирования пассажиров устройство 7 подает звуковой сигнал. Если предполагаемая длина тормозного пути транспортного средства «В» короче расстояния до него, и обозначается как «НЕТ», то режим работы системы сохраняется до полной остановки транспортного средства «В» (скорость его относительного движения равна ~0 м/с) и деактивируется с началом движения транспортного средства «А».
Предложен способ предотвращения столкновения транспортных средств, останавливающихся друг за другом при движении в одной полосе. На остановившемся транспортном средстве измеряют дистанцию и скорость сближения с ним сзади тормозящего транспортного средства. Вычисляют ускорение торможения и прогнозируют его тормозной путь до полной безаварийной остановки сзади. В случае нехватки длины тормозного пути сравнивают ее величину со свободным расстоянием перед остановившимся транспортным средством и, в случае неизбежного наезда сзади, обеспечивают автоматическое перемещение остановившегося транспортного средства вперед на возможное в данной дорожной ситуации безопасное расстояние. Достигается повышение безопасности. 1 ил.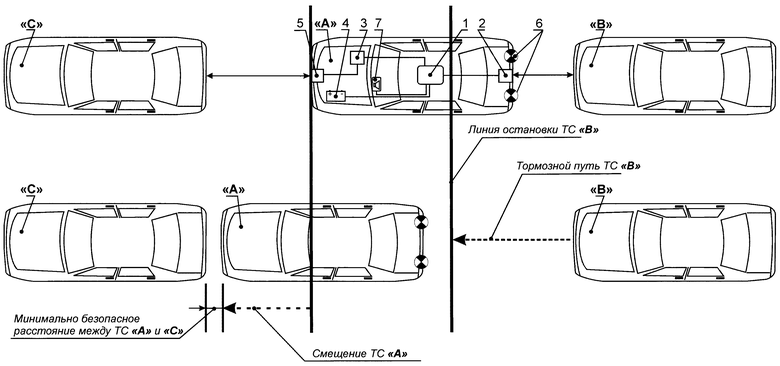
Способ предотвращения столкновения транспортных средств, останавливающихся друг за другом при движении в одной полосе, характеризующийся тем, что на остановившемся транспортном средстве измеряют дистанцию и скорость сближения с ним сзади тормозящего транспортного средства, вычисляют ускорение торможения и прогнозируют его тормозной путь до полной безаварийной остановки сзади, в случае нехватки длины тормозного пути сравнивают ее величину со свободным расстоянием перед остановившимся транспортным средством и, в случае неизбежного наезда сзади, обеспечивают автоматическое перемещение остановившегося транспортного средства вперед на возможное в данной дорожной ситуации безопасное расстояние.
| US2020122773 A1, 23.04.2020. |

