Область техники
Изобретение относится к области технологии робототехники, в частности, к интеллектуальным системам управления подвижными объектами, и может быть использовано для автоматического управления движением наземных, воздушных и водных подвижных объектов по пути движения.
Уровень техники
Развитие техники и технологий средств передвижения приводит к повышению загруженности путей сообщений и ставит задачи, связанные с совершенствованием организации движения подвижных объектов, в частности, транспортных средств, в отношении безопасности и скорости движения. Например, интенсификация транспортных потоков, вызванная ростом коммерческих перевозок, а также личного транспорта, усложняет процесс управления транспортным средством, что приводит к необходимости решения задач, связанных с повышением безопасности по пути движения и растущих требований по экологичности и безопасности самого транспортного средства (ТС). Кроме того, часто меняющиеся условия движения (загруженность по пути движения, погодные условия и др.) создают дополнительную нагрузку на водителя(пилота) ТС, ведут к перерасходу горюче-смазочных материалов, повышенному износу узлов и агрегатов и т.п. Это заставляет производителей разрабатывать новые системы и технологии по автоматизации управления транспортным средством. Одно из направлений решения такой задачи связано с разработкой беспилотных (автономных) транспортных средств.
Существующие на сегодняшний день решения по управлению дорожным ТС без участия водителя(пилота) связаны с автоматизацией отдельных режимов движения транспортного средства –парковка, движение в пробках, перемещение по автомагистрали с использованием LiDAR’ов, радаров, ультразвуковых датчиков, оптических камер, систем GPS для позиционирования и навигации на пути движения с использованием карт местности и т.д. Все они объединяются в единое целое через внутренние и внешние сети передачи данных и управляются микроконтроллерами электронных блоков управления, что позволяет разносторонне оценивать ситуацию в процессе движения. Сигналы от входных устройств передаются в электронный блок управления, где производится их обработка в соответствии с заложенной программой и формирование управляющих воздействий на исполнительные устройства ТС. В качестве исполнительных устройств используются конструктивные элементы рулевого управления, тормозной системы, системы курсовой устойчивости, системы управления двигателем и другие.
Реализованные в современных дорожных транспортных средствах упомянутые системы автоматизации управления обеспечивают, в основном, безопасное движение в автономном (автоматизированном) режиме управления в рамках стабильных внешних (окружающих) условий движения. Наличие упомянутых выше систем помощи водителю при изменяющихся внешних условиях, прежде всего погодных, а также погрешностях позиционирования, недостаточно для управления движением в автономном режиме без снижения скорости движения по заданному пути и увеличения вероятности возникновения аварийной ситуации.
Для решения такой задачи в заявке Кореи KR20150086065 А [1], опубл. 27.07.2015,предлагается система и способ навигации ТС с управлением в автономном движении по пути движения с препятствиями. Способ включает в себя представление глобального пути по трассе движения в виде последовательности опорных точек перемещения, отслеживание положения ТСна дороге, при обнаружении препятствия для текущего положения ТС выполняется формирование дополнительного пути по трассе движения путём генерирования множества возможных компенсационных путей перемещения, параллельных глобальному пути в пределах ширины дороги, и выбор из них оптимального пути, обходящего препятствие, в виде последовательности опорных точек, параллельных истинному пути, и продолжение движения по сгенерированному пути обхода препятствия, параллельному глобальному пути.
Данный способ осуществляется устройством управления движением, в котором фактическая окружающая обстановка по пути движения ТС отслеживается датчиками окружающей обстановки: лазерными сканерами, камерами и др.для получения информации о препятствиях, полосах движения, поворотах, сужении дороги, а также выполняется анализ географической информации о дороге (уклоны, состояние поверхности дороги), а позиционирование – с использованием системы спутниковой навигации (GPS).
Такое решение обеспечивает автоматическое управление с учётом окружающей обстановки с достаточной степенью надёжности при отсутствии помех в работе датчиков, отслеживающих окружающую обстановку, которые могут быть вызваны, например, погодными условиями, физическими препятствиями и т.п.Кроме того, такой способ и устройство не обеспечивают поддержку оптимальной траектории перемещения по пути движения и точности позиционирования, в пределах погрешности номинального положения GPS-приёмника, что ограничивает движение ТС с оптимальными скоростью движения, расходом топлива и учётом технических особенностей ТС, таких как: массово-габаритные параметры, тяговые и тормозные характеристики, характеристики энергопотребления и др.
Известно техническое решение по пат. США US9568916 [2], опубл. 14.02.2017, в котором раскрывается способ создания трека применительно кавтоматически управляемому (беспилотному) дорожному транспортному средству, движение которого по трассе обеспечивается с помощью множества датчиков, отслеживающих окружающую обстановку, согласно предварительно полученной модели трассы, на которой отображаются дорожные условия. Модель трассы составляется согласно состоянию трассы и включает в себя траекторию трассы, точки которой, принадлежащие дорожному полотну и выступающие как точки наземного ориентира, располагаются вдоль кривой, которая строится в трёхмерной наземной системе координат, и на всём протяжении трассы отслеживает особенности физического состояния каждого реального участка дорожного полотна, отображающегося в облаке точекс шагом 1 м, при этом точка наземного ориентира, в дополнение к её положению в наземной системе координат, является точкой интерполированной последовательности точек, наиболее близкой к физической форме участка дороги, которая несёт одну или более характеристик дорожных условий трассы.
Движение ТС по трассе в режиме автоматического управления осуществляется с использованием компьютеризированной системы управления, установленной на транспортном средстве, содержащей блок датчиков, осуществляющих сбор данных о дорожных условиях в виде точечных ориентиров и состоянии транспортного средства во время движения, процессорный блок управления, связанный с двигателем и рулевым управлением ТС, и соединенный с блоком датчиков и блоком получения и хранения данных о точках наземных ориентиров по трассе, несущих одну или более характеристик дорожных условий трассы. Блок датчиков может включать в себя группу датчиков: радар, LiDAR, ультразвуковые датчики, камеры (визуальные и/или термальные), гироскопы, приёмники GPS, инерционные измерительные системы, акселерометры, магнитометры, а также прочие средства. Необходимая для управления информация извлекается из датчиков с помощью аппаратного и программного обеспечения компьютера. По информации, полученной с датчиков, применительно к модели трассы, точки которой принадлежат дорожному полотну, устанавливаются параметры навигации или другие функции автоматического управления, включая задание направления транспортного средства по трассе к месту назначения, соблюдение всех дорожных сигналов и указателей, ограничений скорости и других законных требований, а также избежание столкновений с пешеходами и прочими транспортными средствами. Процессорный блок управления, получая информацию от датчиков, сравнивает информацию в блоке получения и хранения данных о координатном положении и моделированной обстановке в виде ориентиров с использованием придорожной инфраструктуры и системы позиционирования в текущий момент времени и подтверждает своё положение на пространстве дорожного полотна, определяя тем самым, что движение происходит правильно.
Автоматическое управление транспортным средством с использованием трека по техническому решению [2] применимо только к наземным ТС и может быть осуществлено при обязательном наличии наземных ориентиров, надёжное взаимодействие с которыми датчиков ТС во многом зависит от погодных условий и внешних факторов, которые могут препятствовать сбору информации датчиками ТС в процессе движения. Кроме того, установление соответствующих параметров движения ТС по трассе в соответствии с данными наземного ориентира осуществляется в оперативном режиме, что требует значительных вычислительных мощностей. Все это снижает точность автоматического управления и ограничивает скоростной режим транспортного средства.
Сущность изобретения
Задачей настоящего изобретения является разработка способа создания трека для осуществления автономного движения, который в полной мере обеспечивает автоматическое управление подвижными объектами любого вида – наземного, воздушного, надводного – по заданному пути движения путём построения траектории движения подвижного объекта без использования специальных ориентиров по траектории пути движения.
Техническим результатом предлагаемого способа создания трека для автономного движения подвижного объекта является универсальность трека для любого типа подвижного объекта, движущегося в автономном режиме по земле, воде или в воздушном пространстве при любых погодных условиях с высокой точностью управления на высоких скоростях.
Указанный технический результат достигается способом создания трека для автономного движения подвижного объекта по заданному пути движения, включающим в себя:
- формирование пути движения подвижного объекта;
- представление пути движения в виде пространственно-ориентированной модели на основе геопространственных данных в виде множества последовательных опорных точек в трёхмерной системе координат и сохранение значений координат опорных точек в виде файла пространственно-ориентированной модели;
- формирование векторного трека на основе пространственно-ориентированной модели пути движения в виде набора исполнительных векторов перемещения по пути движения, каждый из которых соединяет пару последовательных опорных точек в упомянутом множестве последовательных опорных точек, причём начальная точка каждого следующего исполнительного вектора перемещения является конечной точкой предыдущего исполнительного вектора перемещения, и для каждой начальной точки исполнительного вектора перемещения задают набор параметров движения с возможностью обновления упомянутых параметров в реальном времени;
- сохранение векторного трека в виде файла исполняемой программы.
Параметры, определяющие условия движения подвижного объекта по заданному пути движения, определяются заранее для конкретного пути движения и представлены в файле трека в виде блоков данных. По настоящему изобретению набор параметров условий движения формируется блоками данных кинематических параметров движения подвижного объекта, данных навигации, данных управляющих воздействий, данных коридора движения и данных условий движения.
Последовательность опорных точек пути движения задана с переменным шагом дискретизации в интервале 0,01 -10 м, координатное положение которых соответствует положению в пространстве с точностью до 0,01 м.
Трек в виде исполнительных векторов по настоящему изобретению может быть реализован посредством системы управления автономным движением подвижного объекта, содержащей систему позиционирования, блок памяти для хранения файла векторного трека и блок управления автономным движением.
Привязка транспортного средства к заданному пути движения осуществляется путём загрузки файла векторного трека пути движения в блок памяти системы управления автономным движением и исполнение векторного трека блоком управления автономным движением путём выполнения следующих шагов, включающих в себя:
- определение текущего пространственного положения подвижного объекта по данным системы позиционирования;
- нахождение на векторном треке опорной точки, ближайшей к текущему положению подвижного объекта;
- нахождение на векторном треке исполнительного вектора для обнаруженной ближайшей опорной точки трека, для которого эта опорная точка является начальной;
- формирование управляющих команд в соответствии с набором параметров движения в каждой начальной точке исполнительных векторов трека;
- перемещение подвижного объекта к следующей опорной точке трека путём передачи управляющих команд системой управления движением органам управления подвижного объекта и их исполнение органами управления с возможностью прерывания автономного движения и передачи управления водителю или оператору;
- повторение упомянутых шагов исполнения векторного трека для каждой следующей опорной точки трека до момента завершения прохождения всех опорных точек трека с последующей передачей управления водителю/оператору подвижного объекта для принятия решения по дальнейшему управлению подвижным объектом или исполнение предопределенного алгоритма управления или маневра.
Согласно изобретению, переход к режиму автономного движения выполняется после получение текущего пространственного расположения подвижного объекта по данным системы позиционирования и команды водителя/пилота/оператора подвижного объекта или системой коллективного управления группой подвижных объектов, в т.ч. роботов.
Краткий перечень чертежей
Изобретение поясняется чертежами, на которых
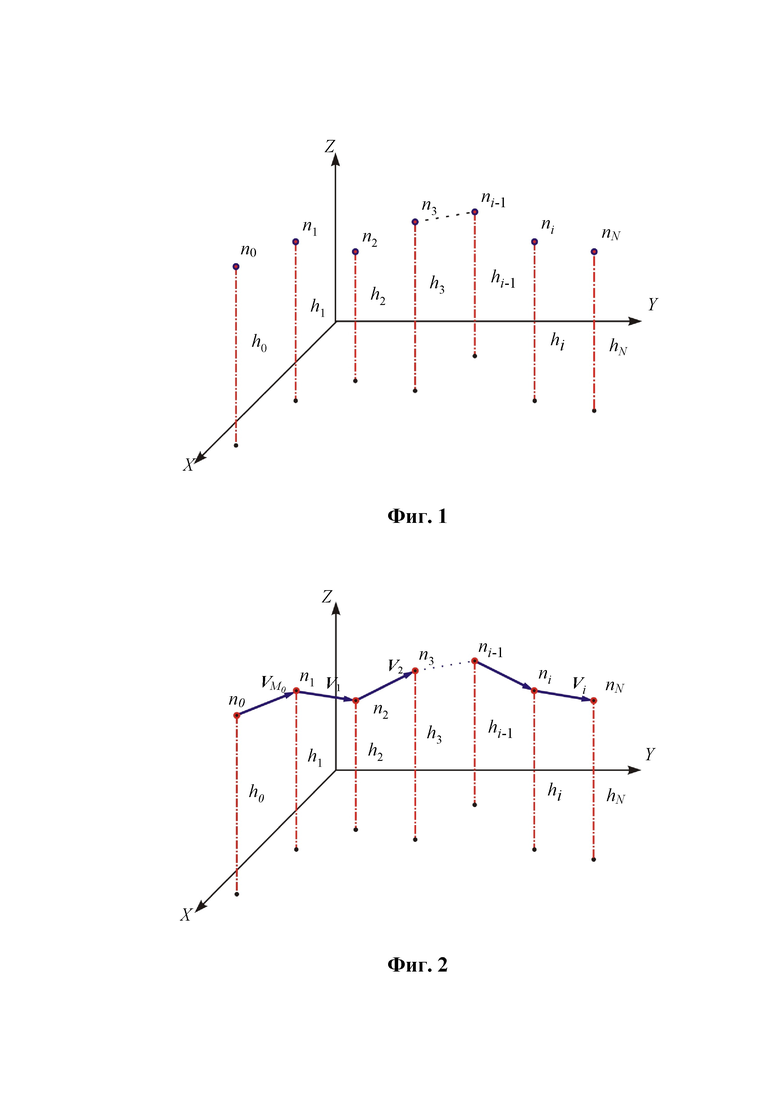
фиг. 1. – схема пространственно-ориентированной модели пути движения в виде множества последовательных опорных точек в трёхмерной системе координат;
фиг. 2 – схема векторного трека по пути движения в трехмерной системе координат;
фиг. 3а – блок-схема алгоритма осуществления способа осуществления автономного движения по изобретению;
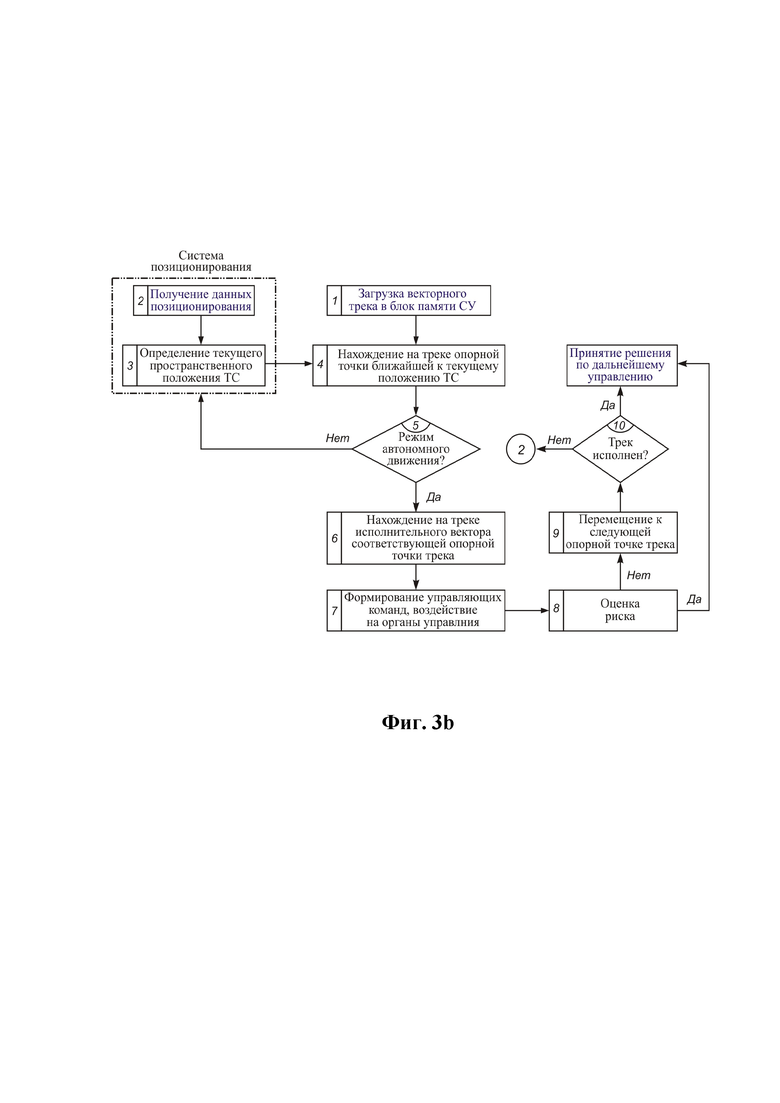
фиг. 3b – блок-схема алгоритма осуществления способа автономного движения по команде перехода к автономному движению;
фиг. 4 – структура системы автоматического управления подвижным объектом для осуществления автномного движения подвижным объектом по пути движения.
Подробное описание изобретения
Предлагаемое изобретение будет подробно описано применительно к дорожному транспортному средству, далее упоминаемому как транспортное средство (ТС), и распространяется без каких-либо ограничений и изменений для любого вида подвижных объектов различного назначения.
Известно, что движение между начальной и конечной точками может осуществляться по различным траекториям. Для движения транспортных средств путь движения между начальным и конечным пунктами определяется, например, для наземного транспорта, дорожной сетью или возможностью внедорожного движения.
Для осуществления движения в автономном режимепо проложенному пути движения проводится геокодирование и подготовка цифровой трёхмерной модели местности и пространства по пути движения.
Создание цифровой 3D модели района планируемого пути движения
Цифровая модель местности (ЦММ) является базовой составляющей способа создания трека и, как совокупность точек местности с известными трехмерными координатами (или матрицы высот) и различными кодовыми обозначениями, даёт исходную информацию, необходимую для формирования пространственно-ориентированного пути движения в цифровой форме. Кодовые обозначения характеризуют связи между соответствующими точками ЦММ.
Съёмка местности может проводиться любыми известными методами, обеспечивающими получение трёхмерной модели местности, например, цифровой аэросъёмкой с внешним ориентированием и выводом результатов аэрофотосъёмки района планируемого создания маршрута движения. Корректировка и контроль результатов аэросъёмочных работ и фотограмметрии производится по ГНС, определением наземных точек внешнего ориентирования (пунктов специальной опорной геодезической сети), привязанных к району, в котором проходит путь движения. Результатом аэрофотосъёмки является получение ортофотоплана района пути движения и плотное облако точек, приведённое к цифровому виду регулярной матрицы высот с заданным шагом.
Геопространственные данные также могут быть получены космической съемкой, лазерным сканированием (наземным и воздушным), радиолокационным зондированием и другими способами.
При наличии существующей цифровой трёхмерной модели местности и пространства, точки пространственно-ориентированного пути движения могут быть определены внутри этого пространства и загружаются в блок памяти системы управления транспортного средства.
На фиг. 1 показан пример схемы пространственно-ориентированного пути движения, представленного в виде последовательности N опорных точек ni, i = 0, 1, 2, 3… N в трёхмерной декартовой системе координат X, Y, Z. Могут использоваться любые трёхмерные системы координат (сферические, цилиндрические, географические/геодезические и другие).
Точки пространственно-ориентированного пути движения на фиг. 1,выделены из полученного для данной местности ортофотоплана и цифровой регулярной матрицы высот с использованием специального программного обеспечения геоинформационных систем (СПО ГИС) методом геокодирования.
Создание векторного трека по пути движения
Используя созданный пространственно-ориентированный путь движения в виде последовательности опорных точек, создают трек для автономногодвижения ТС в виде последовательности векторов перемещения по пути движения, которые образуют векторный трек пути движения.
На фиг. 2. представлена схема векторного трека по пути движения в трехмерной системе координат. Каждый вектор перемещения несёт информацию о параметрах движения, включающих в себя направление движения, данные о дорожных условиях, географическую информацию о дороге, режиме движения ТС по пути движения, соответствующих начальной точке вектора, который в контексте настоящего изобретения определён как исполнительный вектор.
Последовательность опорных точек по пути движения формируют с переменным шагом дискретизации не менее 0,01 м (например, для дорожного транспорта предпочтительно использование интервала 0,2-2,5 м), при этом координатное положение опорных точек соответствует положению в пространстве с точностью до 0,01м. Такая точность в полной мере обеспечивается существующими средствами и методами получения цифровой геопространственной модели и даёт пространственно-ориентированное векторное описание пути движения от начальной точки n0 до конечной точки nN движения прямолинейными участками с узлами изменения по углам поворота (азимуту) и углам изменения положения по профилю маршрута (углы наклона).
На фиг. 2 показан векторный трек для некоторого пути движения, который образован множеством последовательных исполнительных векторов VMi перемещения по пути движения, в котором начальная точка ni в дискретном множестве последовательных опорных точек пути движения каждого следующего исполнительного вектора перемещения является конечной точкой ni+1 предыдущего исполнительного вектора перемещения. Такой трек, представляющий собой последовательность множества исполнительных векторов, реализован в виде файла, загружаемого в блок памяти системы управления автономным движением ТС, и для каждой начальной точки ni исполнительного вектора представляется набор данных, определяющих движение транспортного средства по заданному пути движения.
Структура файла трека включает в себя:
блок данных кинематических параметров движения ТС;
блок данных навигации;
блок данных управляющих воздействий на органы управления;
блок данных характеристик дороги (коридора движения);
блок данных условий движения с критериями оптимальности.
Блок данных кинематических параметров движения ТС обеспечивает формирование режимов работы органов управления ТС по направлению исполнительного вектора в каждой начальной точке исполнительного вектора. Эти данные являются расчётными.
Блок данных навигации обеспечивает выполнение позиционирования ТС по треку с использованием различных систем навигации и/или локализации положения объекта. Блок данных навигации может быть дополнен блоком гибридной навигации, улучшающим точность позиционирования с применением дополнительных средств (инерциальная навигация, расчётно-аналитическая, оптическая и другие).
Блок данных управляющих воздействий на органы управления ТС связан с блоком кинематических параметров движения и обеспечивает задание необходимых действий, например, по повороту рулевого колеса, управлению силовой установкой, тормозной системой и т.д., в зависимости от объекта управления.
Блок данных характеристик дороги (коридора движения)содержит информацию о классе (типе) дорог, продольном и боковом уклонах дорожного полотна, усреднённом коэффициенте сцепления с поверхностью дорожного полотна в идеальных (нормальных) погодных условиях, международном индексе ровности дорожного полотна и кривизне дороги (коридора движения) в рассматриваемом месте.
Блок данных условий движения содержит информацию, включающую в себя, но не ограничивающуюся следующими параметрами (данные для дорожного ТС):
– максимальную разрешенную скорость движения Vmax в соответствии с ПДД и установленными дорожными знаками;
– коэффициент погодных условий Kweather, по которому осуществляется корректировка допустимой скорости движения;
– критическую скорость движения Vcrit для конкретного ТС с учетом дорожных и погодных условий (максимально возможная и реализуемая транспортным средством скорость, обеспечивающая асимптотическую устойчивость движения);
– комплексный коэффициент Keff корректировки скорости движения, отражающий критерий энергоэффективности;
– коэффициент Kinf корректировки скорости движения, учитывающий особенности дорожной инфраструктуры в рассматриваемом месте;
– коэффициент Ksat степени достоверности получаемых данных спутниковой навигации в данном месте. Этот коэффициент учитывает инфраструктурные и природные помехи и является индикатором переключения со спутниковой системы на другие системы позиционирования (оптические, инерциальные и др.) в том числе при применении гибридных навигационных систем позиционирования.
Информация блока данных условий движения является интерактивно обновляемой.
Отметим, что с точки зрения применения, некоторые параметры блока данных условий движения являются взаимоисключающими. Соответственно, конкретный набор параметров данных условий движения исполнительного вектора определяется блоком управления автономным движением в зависимости от поставленной транспортной задачи, например, исходя из таких критериев оптимальности как минимальное время в пути, экономия топлива, обеспечение безопасности, снижение рисков и т.п. Например, для движения гоночного автомобиля по трассе блоком управления автономным движением будет использоваться скорость Vcrit из блока данных условий движения. В другом примере движения автопоезда только с задачей экономии расхода топлива, скорость движения в автономном режиме будет определяться как Vmax⋅Keff.
Представление трека в виде файла позволяет удобно и быстро обновлять информацию о треке и загружать обновлённый файл трека в блок памяти системы управления автономным движением. Набор файлов с последовательными треками формирует трек большей протяжённости. Перед началом автономного движении ТС файл или хотя бы первый файл набора файлов продолжительного трека должен быть загружен в блок памяти. Остальные файлы треков, равно как и блок условий движения уже загруженных файлов, могут загружаться и/или обновляться по мере продвижения ТС по пути движения. Также возможна реализация предварительной загрузки в блок памяти всех файлов трека.
Структура трека по изобретению даёт возможность создать способ и систему управления автономным движением, которые в комплексе обеспечивают эффективное по точности, надёжности и быстродействию автономное движение без привязки к какой-то конкретной системе позиционирования и с возможностью выбора и последующей реализации необходимых параметров движения в соответствии с конкретной транспортной задачей (в соответствии с критериями оптимальности).
Известные способы автономного движения в большинстве своем построены на использовании данных различных систем навигации в реальном времени с использованием электронной карты местности, загруженной в память блока системы управления ТС. При этом установление режимов движения: направление, скорость и др. по пути движения осуществляется с использованием расчетных алгоритмов, работающих в реальном времени, построенных зачастую на системах искусственного интеллекта (экспертные системы, сети глубокого обучения, системы контекстной адаптации и другие гибридные решения) и требующих значительных вычислительных мощностей. То есть в известных системах расчет режимов движения выполняется оперативно на каждом участке вычислительным модулем блока управления ТС. Естественно, что такой подход, в сравнении с разработанным по настоящему изобретению, приводит к необходимости использования значимых вычислительных мощностей, запаздыванию передачи команд к органам управления с ростом скорости движения, снижению точности управления на высоких скоростях движения ТС в автономном (автоматическом) режиме.
Представление пути движения в виде описанного выше векторного трека позволяет реализовать способ управления автономным движением по настоящему изобретению, используя данные о текущем положении ТС и цифровое описание векторного трека, загруженного в виде файла в блок памяти системы управления автономным движением ТС.
На фиг. 3 показана блок-схема алгоритма осуществления управления автономным движением ТС в соответствии с настоящим изобретением.
В соответствии с транспортной задачей, с начальной и конечной точками пути движения, определённого в виде множества последовательных опорных точек, создают векторный трек на основе пространственно-ориентированной модели пути движения и сохраняют в виде файла модели пути движения и векторного трека.
Выполняют привязку транспортного средства к заданному пути движения путём загрузки файла векторного трека (1) пути движения в блок памяти системы управления (СУ) автономным движением.
По данным (2) системы позиционирования, являющейся составной частью системы управления автономным движением, определяют текущее пространственное положение ТС (3) и находят на векторном треке i-ю точку, ближайшую к текущему положению ТС (4) по положению и направлению движения.
Переход к исполнению векторного трека может выполняться сразу после нахождения опорной точки трека (4), в соответствии с блок-схемой на фиг. 3а, или после получения от системы управления автономным движением команды (5) перехода к режиму автономного движения, в соответствии с блок-схемой на фиг. 3b. Такая команда может быть подана водителем (пилотом), оператором или более совершенной системой управления ТС, в т.ч. дистанционно. Если команда на переход к режиму автономного движения не получена, система управления автономным движением переходит к получению данных от системы позиционирования и слежению за перемещением опорной точки синхронно движению ТС.
Исполнение векторного трека осуществляется блоком управления автономным движением по получении команды перехода к автономному движению, в соответствии с программным кодом, и начинается с опорной, например, начальной точки трека, как последовательность выполнения следующих шагов:
- на векторном треке находят исполнительный вектор, для которого была обнаружена ближайшая опорная точка (6). Каждая текущая i-я точка исполнительного вектора несет в себе информацию о параметрах движения между текущей и следующей точками исполнительного вектора;
- в соответствии с набором параметров движения, в каждой точке исполнительных векторов трека блок управления автономным движением формирует управляющие команды, по которым осуществляются управляющие воздействия на органы управления ТС (7): например, для дорожного транспорта устанавливаются положения педали акселератора, педали тормоза, угол поворота рулевого колеса и другое.
- после передачи управляющих команд органам управления ТС выполняется оценка риска столкновения с объектами по пути следования или нарушения работоспособности системы (8) с целью определения момента принудительного вмешательства в процесс управления (происходит отслеживание связи между электронными блоками управления, качества навигационного решения, результатов работы системы предотвращения столкновений и т.п.) и, соответственно, или исполнение управляющих команд органами управления для осуществляется перемещение ТС к следующей опорной точке трека (9), или прерывание автономного движения и передача управления водителю (пилоту), оператору (системе) для принятия решения по дальнейшему управлению (10). Де-факто разработанный трек можно сравнить с виртуальным пространственным рельсом, по которому производится движение ТС также, как и поезда по железной дороге. Соответственно, при возникновении препятствий или рисков схождения с трека должна запускаться отдельная система принятия ручного или автоматического решения: например, объезд или остановка, или изменение скорости движения, или переключение на другой трек. Стоит заметить, что маневры объезда, перестроения и прочие могут автоматически генерироваться в формате описанного выше трека пути движения.
- при достижении следующей опорной точки трека снова выполняются описанные выше шаги до момента завершения прохождения всех опорных точек трека, т.е. исполнения трека, с последующей передачей управления водителю (пилоту) или оператору ТС для принятия решения по дальнейшему управлению ТС.
Структура трека по изобретению позволяет выполнять позиционирование ТС с использованием существующих систем позиционирования и не ограничивает возможность использования иных систем позиционирования. В частности, в объеме настоящего изобретения, способ автономного движения может быть осуществлен с системами позиционирования, функционирующими на основе:
– приема спутниковых сигналов соответствующих группировок (без поправок или с поправками от наземных станций или геостационарных спутников или специализированных программных средств, обученных сетей искусственного интеллекта, генерирующих поправки, или других источников);
– инерциальных систем;
– оптических систем (анализ видеопотока или потока облака точек на предмет обнаружения маркеров геопривязки и относительных перемещений классифицируемых объектов);
– триангуляции сигналов сотовой связи, радиосигналов, wi-fi сигналов и других сигналов развернутой инфраструктурной сети;
– модели движения транспортного средства с использованием данных телеметрии (расчетно-аналитическая навигация);
– инфраструктурной сети радиочастотных меток;
– гибридных систем позиционирования; и других.
Поскольку исполнение трека не требует дополнительных вычислений для формирования управляющих команд, по сравнению с другими способами, ввиду готового набора параметров условий движения для каждой начальной точки исполнительного вектора, существенно сокращается время на отработку команд органами управления ТС и повышается быстродействие системы управления автономным движением, что повышает качество (точность) управления и позволяет двигаться с более высокими скоростями.
Способ автономного движения по настоящему изобретению, реализующий векторный трек, может быть осуществлен с использованием системы управления автономным движением, устанавливаемой на любой вид транспортного средства: наземный, водный, воздушный и др., структура которой представлена на фиг. 4.
Система управления автономным движением транспортного средства содержит систему позиционирования, блок памяти и блок органов управления, связанных с блоком управления автономным движением.
В рамках способа исполнения трека по изобретению, сочетание системы позиционирования, блока памяти и блока управления создает своеобразную навигационную систему, которая дает возможность эффективно решать задачу управления автономным движением по заданному маршруту (пути движения) в любой среде и любых условиях, в т.ч. погодных.
Система позиционирования, как было описано выше, может быть реализована на основе существующих систем позиционирования или любой гибридной системы.
Блок памяти системы управления автономным движением может быть реализован на базе любого постоянного запоминающего устройства, также может быть физически вынесен за пределы ТС, т.е. храниться в облаке данных. На фиг. 4 блок памяти содержит трек в виде файла (набора файлов), в котором прописаны блоки данных трека, упомянутые выше, с возможностью интерактивного обмена данными с блоком управления автономным движением.
Команды управления от блока управления автономным движением, поступившие в блок органов управления, отрабатываются в нем, и информация об исполнении команд управления направляется в блок управления автономным движением.
Хотя выше были описаны конкретные технические решения по осуществлению настоящего изобретения, специалистами в данной и смежных областях техники могут быть осуществлены различные изменения и модификации без выхода за пределы объёма этого изобретения, в соответствии с описанием и решаемыми задачами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |
| Способ управления движением беспилотных автономных транспортных средств (БАТС) и колонн БАТС интеллектуальной транспортной инфраструктурой (ИТИ) автомобильной дороги | 2018 |
|
RU2712487C1 |
| Автономный комплекс управления подвижным объектом, преимущественно в сложных навигационных условиях | 2016 |
|
RU2706434C2 |
| Способ управления движением транспортных средств с системами помощи водителю в среде "интеллектуальная транспортная система - транспортное средство - водитель" | 2021 |
|
RU2774261C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| Автономный мобильный модуль повышения точности определения координат и маршрутов движения войсковых объектов | 2020 |
|
RU2762080C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Способ автоматического формирования пути и скорости движения роботизированного колесного подвижного объекта | 2023 |
|
RU2816411C1 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| ОТСЛЕЖИВАНИЕ ОБЪЕКТОВ ПУТЕМ ОБУЧЕНИЯ БЕЗ КОНТРОЛЯ | 2017 |
|
RU2717616C2 |


Группа изобретений относится к интеллектуальным системам управления подвижными объектами. Способ создания трека для автономного движения подвижного объекта по заданному пути движения включает в себя шаги, на которых формируют путь движения и представляют его в виде множества последовательных опорных точек в трёхмерной системе координат. Сохраняют значения координат опорных точек в виде файла пространственно-ориентированной модели и формируют векторный трек на основе пространственно-ориентированной модели пути движения в виде набора исполнительных векторов. Каждый из векторов соединяет пару последовательных опорных точек в упомянутом множестве последовательных опорных точек. Причём начальная точка каждого следующего исполнительного вектора перемещения является конечной точкой предыдущего исполнительного вектора перемещения и для каждой начальной точки исполнительного вектора перемещения задают набор параметров движения с возможностью обновления упомянутых параметров в реальном времени. Векторный трек сохраняется в виде файла исполняемой программы, который затем загружается в блок памяти системы управления автономным движением подвижного объекта. Обеспечивается автономное движение подвижного объекта с высокой точностью управления на высоких скоростях. 2 н. и 2 з.п. ф-лы. 5 ил.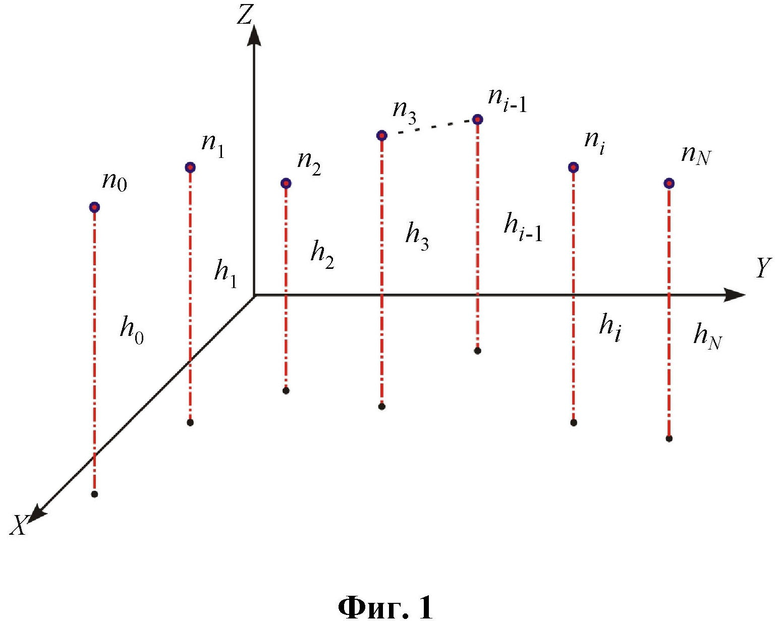
1. Способ создания трека для автономного движения подвижного объекта по заданному пути движения, включающий в себя этапы, на которых
формируют путь движения подвижного объекта,
представляют путь движения в виде пространственно-ориентированной модели на основе геопространственных данных в виде множества последовательных опорных точек в трехмерной системе координат и сохранение значений координат опорных точек в виде файла пространственно-ориентированной модели,
формируют векторный трек на основе пространственно-ориентированной модели пути движения в виде набора исполнительных векторов перемещения по пути движения, каждый из которых соединяет пару последовательных опорных точек в упомянутом множестве последовательных опорных точек, причем начальная точка каждого следующего исполнительного вектора перемещения является конечной точкой предыдущего исполнительного вектора перемещения и для каждой начальной точки исполнительного вектора перемещения задают набор параметров движения с возможностью обновления упомянутых параметров в реальном времени, причем последовательность опорных точек пути движения задают с переменным шагом дискретизации в интервале 0,01-10 м, координатное положение которых соответствует положению в пространстве с точностью до 0,01 м, и сохраняют векторный трек в виде файла исполняемой программы.
2. Способ по п. 1, в котором набор параметров условий движения формируют блоками данных кинематических параметров движения подвижного объекта, данных навигации, данных управляющих воздействий, данных коридора движения и данных условий движения.
3. Способ осуществления автономного движения подвижного объекта с использованием трека, созданного по п. 1, включающего в себя выполнение следующих шагов, на которых
определяют текущее пространственное положение подвижного объекта по данным позиционирования,
находят на векторном треке опорную точку, ближайшую к текущему положению подвижного объекта,
находят на векторном треке исполнительный вектор для обнаруженной ближайшей опорной точки трека, для которого эта опорная точка является начальной,
формируют управляющие команды в соответствии с набором параметров движения в каждой начальной точке исполнительных векторов трека,
перемещают подвижный объект к следующей опорной точке трека путем передачи управляющих команд системой управления движением органам управления подвижного объекта и их исполнение органами управления с возможностью прерывания автономного движения и передачи управления водителю или оператору,
повторяют упомянутые шаги исполнения векторного трека для каждой следующей опорной точки трека до момента завершения прохождения всех опорных точек трека, с последующей передачей управления водителю или оператору подвижного объекта для принятия решения по дальнейшему управлению подвижного объекта или исполнение предопределенного алгоритма управления или маневра.
4. Способ по п. 3, в котором переход к режиму автономного движения выполняют после получения текущего пространственного расположения подвижного объекта по данным системы позиционирования и команды водителя/пилота или оператора подвижного объекта или системы коллективного управления группой подвижных объектов.
| US 9410811 B2, 09.08.2016 | |||
| US 9760090 B2, 12.09.2017 | |||
| US 8843340 B2, 23.09.2014 | |||
| RU 2012128270 A, 10.01.2014 | |||
| Устройство для уплотнения насоса, работающего при высоких давлениях | 1950 |
|
SU96276A1 |

