ОБЛАСТЬ ТЕХНИКИ
Нижеследующее в целом относится к ультразвуковой допплерографии, мониторингу плода, мониторингу движения плода и связанным областям техники.
УРОВЕНЬ ТЕХНИКИ
Известно, например, из работы под авторством Wrobel и др., «Automated Detection of Fetal Movements in Doppler Ultrasound Signals versus Maternal Perception», журнал «Medical Informatics & Technologies» вып. 23 сс. 43-50 (2014), что для обнаружения движений плода применяют мониторинг плода с использованием ультразвуковой допплерографии. В подходе, предложенном Wrobel и др., к сигналу зависимости амплитуды от времени при ультразвуковой доплерографии сначала применяют фильтрацию нижних частот, чтобы выявить и удалить высокочастотные составляющие, которые могут быть связаны с сердцебиениями плода. Получающийся в результате отфильтрованный по нижним частотам сигнал называют непрерывной актограммой, поскольку он является непрерывным и, как полагают, главным образом отражает движения плода. Данные обрабатывают в односекундных сегментах, причем каждый сегмент помечают как движение, если количество отсчетов, превышающих пороговое значение, выше предельного значения. Таким образом непрерывную актограмму преобразуют в двоичную актограмму.
Wrobel и др. используют активно адаптируемое пороговое значение, формируемое следующим образом. Сначала пороговое значение устанавливают на низкое значение. Затем обрабатывают каждый 1-секундный сегмент, чтобы определить среднее значение на последних 25% односекундного сегмента. Пороговое значение адаптируют к половине этого среднего значения, если оно не ниже первоначального минимального порогового значения, в каковом случае выбирают последнее. Подход Wrobel и др. к выбору порогового значения сопряжен с определенными трудностями. В нем предполагается определенное распределение клинических данных, которое может ограничивать применение этого способа, поскольку он может быть непригодным для конкретного пациента.
Поэтому существует потребность в усовершенствованных системе и способе обнаружения движения плода.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Согласно одному аспекту изобретения раскрыт способ обнаружения движений плода. Из доплеровского ультразвукового сигнала, полученного от плода, извлекают множество пиков. Вычисляют плотность пиков как функцию от амплитуды пика. На основе вычисленной плотности пиков выбирают пороговое значение движения плода. Определяют, содержит ли проверяемый сегмент доплеровского ультразвукового сигнала движение плода, путем сравнения амплитуды пика, извлеченной из проверяемого сегмента доплеровского ультразвукового сигнала, с пороговым значением движения плода.
Согласно другому аспекту изобретения устройство для обнаружения движений плода содержит устройство ультразвуковой допплерографии, включающее доплеровский ультразвуковой датчик для получения доплеровского ультразвукового сигнала от плода. По меньшей мере один электронный процессор запрограммирован на извлечение множества пиков из доплеровского ультразвукового сигнала, вычисление плотности пиков как функции от амплитуды пика и выбор порогового значения движения плода на основе вычисленной плотности пиков. В некоторых вариантах реализации в качестве порогового значения движения плода выбирают амплитуду пика, при которой плотность пиков максимальная. Амплитуда пика, при которой плотность пиков максимальная, может быть определена, например, посредством распределения множества пиков по интервалам амплитуд пика и определения амплитуды пика интервала амплитуд пика, содержащего наибольшее количество пиков. В некоторых вариантах реализации по меньшей мере один электронный процессор также запрограммирован на сегментацию доплеровского ультразвукового сигнала для идентификации проверяемого сегмента доплеровского ультразвукового сигнала и определения того, содержит ли проверяемый сегмент доплеровского ультразвукового сигнала движение плода, путем сравнения амплитуды пика, извлеченной из проверяемого сегмента доплеровского ультразвукового сигнала, с пороговым значением движения плода.
Одним преимуществом является определение истинных движений плода.
Другое преимущество заключается в улучшенном различении истинных движений плода и ложных движений плода.
Еще одно преимущество состоит в обеспечении порогового значения движения плода для обнаружения движений плода, которое настроено для проверяемого плода.
Еще одним преимущество является обеспечение одного или более из вышеупомянутых преимуществ с помощью улучшенной эффективности вычисления.
Еще одно преимущество состоит в обеспечении одного или более из вышеупомянутых преимуществ автоматическим образом, не полагаясь на субъективное ощущение движения плода матерью.
Данный вариант реализации может не обеспечивать или обеспечивать одно, два, более или все из вышеупомянутых преимуществ и/или может обеспечивать другие преимущества, которые будут понятны специалисту в данной области после прочтения и понимания настоящего описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение может быть реализовано в виде различных компонентов или компоновок компонентов, а также различных операций или схем организации операций. Чертежи представлены только в целях иллюстрации предпочтительных вариантов реализации и не должны рассматриваться как ограничивающие изобретение.
На ФИГ. 1 показан пример работы блок-схемы способа обнаружения движения плода.
На ФИГ. 2 схематически показан более подробный иллюстративный вариант реализации обработки, изображенной на ФИГ. 1.
На ФИГ. 3 с целью пояснения схематически показаны графики в параллельных координатах, иллюстрирующие операцию выбора порогового значения движения плода, изображенную на ФИГ. 1 и 2.
На ФИГ. 4 показано иллюстративное устройство ультразвуковой допплерографии, пригодное для выполнения обнаружения движения плода, изображенного на ФИГ. 1 или ФИГ. 2
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее раскрыт усовершенствованный подход к адаптации порогового значения, используемого для обнаружения движения плода при мониторинге плода с применением ультразвуковой допплерографии. Пороговое значение определяется автоматически доплеровской ультразвуковой системой без необходимости вмешательства человека. Для этого из доплеровского ультразвукового сигнала вычисляют множество пиков. Определяют плотность пиков как функцию от амплитуды пика и затем выбирают пороговое значение движения плода как амплитуду пика с наивысшей вычисленной плотностью. Движения идентифицируют как пики доплеровского ультразвукового сигнала, амплитуды которых выше выбранного порогового значения движения.
Преимуществом является то, что при определении порогового значения движения плода не опираются на какие-либо входные данные от матери. Для сравнения, в некоторых подходах мать обеспечивает тренировочные метки, например, посредством нажатия кнопки, когда она ощущает движение плода. Хотя такие данные рассматривают как дополнительную тренировочную информацию или предназначенные для использования при проверке правильности порогового значения движения плода, раскрытый подход выбора порогового значения движения плода не опирается на такие входные данные от матери. Это является преимуществом, поскольку ощущение матерью движений плода является субъективным и иногда может быть ошибочным.
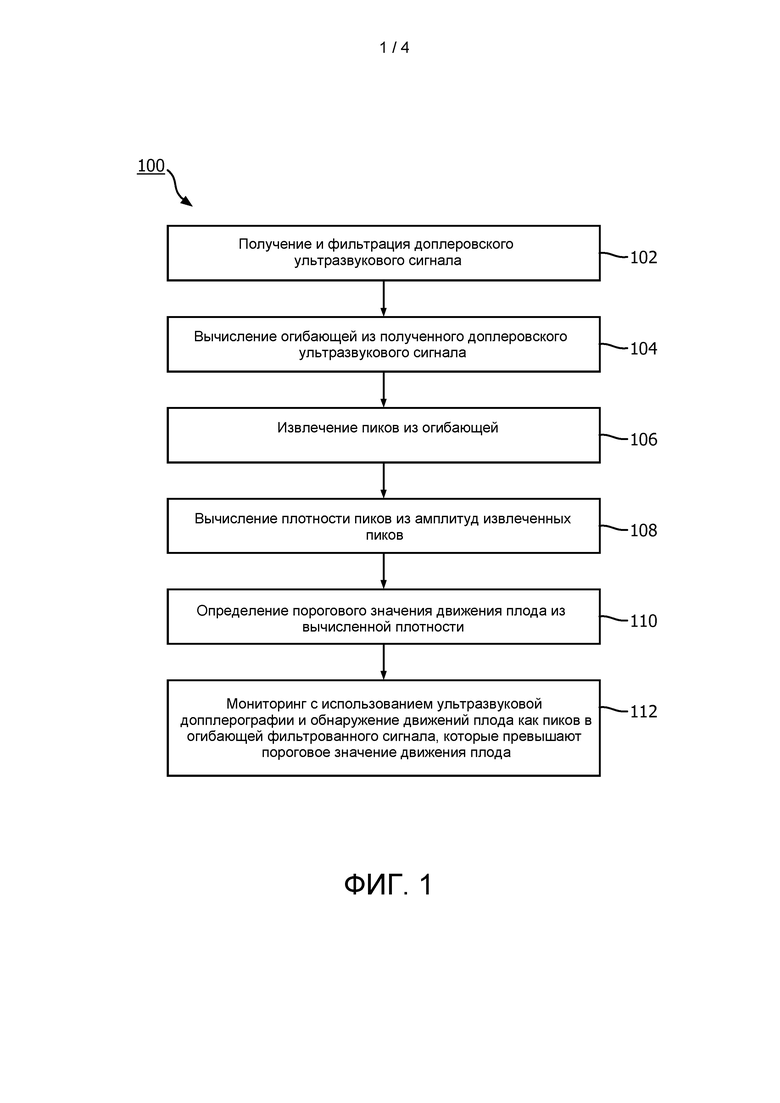
На ФИГ. 1 схематически изображен в виде блок-схемы иллюстративный вариант реализации способа 100 обнаружения движения плода. На этапе 102 получают доплеровский ультразвуковой сигнал. Например, образец доплеровского ультразвукового сигнала получают с заданной частотой или заданным периодом дискретизации (например, через каждые 25 миллисекунд получают выборку). Во время получения 102 доплеровского ультразвукового сигнала поверх области живота матери помещают ультразвуковой датчик так, чтобы облучать ультразвуком младенца в утробе матери. В некоторых примерах доплеровский ультразвуковой сигнал может быть отфильтрован, например, с использованием фильтра нижних частот. Основной целью фильтрации нижних частот является удаление составляющих сигнала, относящихся к сердцебиению плода (и, в частном случае, матери); соответственно, отсечка частоты для фильтра нижних частот должна быть ниже самых низких правдоподобных частот пульса плода (и, в частном случае, матери), например, порядка 60–90 Гц в некоторых вариантах реализации, не имеющих ограничительного характера.
На этапе 104 для каждого сегмента сигнала полученного доплеровского ультразвукового сигнала вычисляют огибающую. Как правило, для удобства обработки доплеровский ультразвуковой сигнал сегментируют на временные сегменты (иногда называемые также эпизодами). В некоторых вариантах реализации сегментация также делает возможной адаптивную коррекцию порогового значения. В некоторых примерах доплеровский ультразвуковой сигнал может быть сегментирован на множество сегментов сигнала, которые могут, в частном случае, частично перекрываться. В некоторых не имеющих ограничительного характера примерах каждый сегмент имеет длительность 2 секунды с 2000 выборками/сегментами. При вычислении огибающей для каждого сегмента может быть, например, использовано выпрямление сигнала с последующим сглаживанием с использованием фильтра нижних частот, хотя в более общем случае может быть использован любой детектор огибающей. Удаление сигнала, относящегося к сердцу, с помощью детектора огибающей предполагает внедрение фильтрации нижних частот.
На этапе 106 извлекают множество пиков из вычисленной огибающей сегментов доплеровского ультразвукового сигнала. Например, каждый пик представляет собой обнаруженное локальное максимальное значение в вычисленной огибающей. Каждый пик из множества пиков связывают с сегментом сигнала доплеровского ультразвукового сигнала, содержащего пик.
На этапе 108 определяют плотность извлеченных пиков как функцию от амплитуды пика. В иллюстративном подходе плотность извлеченных пиков вычисляют как функцию от множества сеток или интервалов амплитуды. Затем вычисленная плотность может быть оценена количественно как количество пиков с амплитудой в каждой сетке или интервале амплитуды.
На этапе 110 выбирают пороговое значение движения плода на основе вычисленной плотности. В одном примере пороговое значение движения плода выбирают как значение амплитуды пика для сетки или интервала амплитуды, имеющих максимальное значение плотности.
На этапе 112 пороговое значение движения плода используют для мониторинга плода. Для этого проверяемый сегмент сигнала доплеровского ультразвукового сигнала от подвергаемого мониторингу плода фильтруют и получают для него огибающую аналогично операциям 102, 104, обнаруживают пики аналогично операции 106, и проверяемый сегмент сигнала определяют как содержащий движение плода посредством сравнения пиков, связывающихся с огибающей проверяемого сегмента сигнала, с пороговым значением движения плода, определенным на этапе 110. Если на этапе 112 пики в проверяемом сегменте сигнала превышают пороговое значение движения плода, то проверяемый сегмент сигнала определяют как содержащий движение плода.
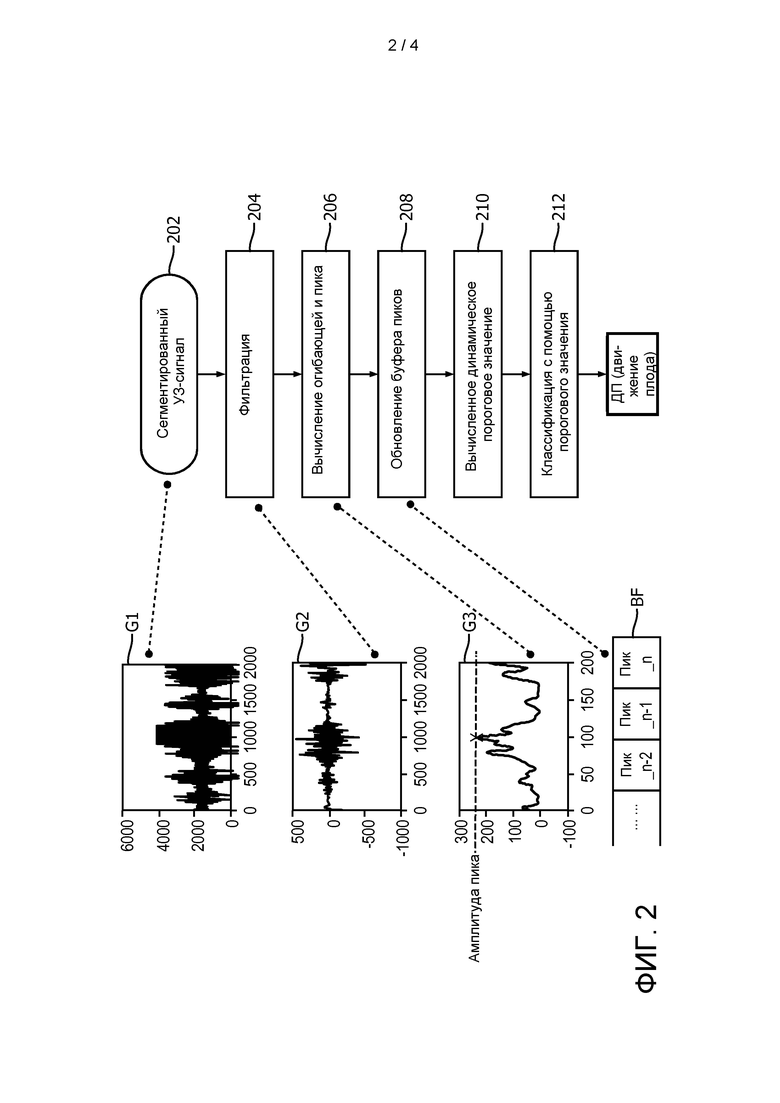
Обратимся теперь к ФИГ. 2, где описан более подробный иллюстративный вариант реализации обработки, изображенной на ФИГ. 1. В данном иллюстративном примере во время операции 202 каждые 0,25 секунды получают последний сегмент данных или эпизод доплеровского ультразвукового сигнала. Хотя в иллюстративном примере на ФИГ. 2 обрабатывают сегменты длительностью 0,25 секунды, в более общем случае сегменты должны быть достаточно короткими, чтобы обеспечивать работу почти в реальном режиме времени, но при этом достаточно большими, чтобы захватывать эпизоды движения плода. В операции 204 сегмент подвергают предварительной обработке с помощью фильтра нижних частот, чтобы выделить составляющие сигнала, преимущественно содержащие информацию о движении плода. На левой стороне ФИГ. 2 показан необработанный доплеровский ультразвуковой сигнал (график G1), а также сигнал после фильтрации нижних частот (график G2). На этих графиках G1, G2, на оси x откладывают одну точку, формируемую каждые 0,25 с. Для этих точек вдоль оси x частота выборки тоже составляет 0,25 с. Сегмент данных длительностью 2 с (с 2000 выборками) доплеровского ультразвукового сигнала вводят для вычисления. Частота выборки для доплеровского ультразвукового сигнала составляет 1 миллисекунду на выборку. Это всего лишь иллюстративный пример, и могут быть использованы другие размеры сегмента и частоты выборки. В операции 206 вычисляют огибающую для сегмента сигнала фильтрованных данных. На этапе 208 определяют максимальный пик для каждого сегмента сигнала, связанного с огибающей. График G3 на левой стороне ФИГ. 2 демонстрирует иллюстративный пример вычисленной огибающей и помеченный крестиком пик, имеющий амплитуду пика около 240 в данном примере. График G3 имеет шкалу 0–200 ввиду субдискретизации до 1/10-ой частоты выборки. На этапе 208 эту амплитуду пика добавляют в буфер пиков. Иллюстративный буфер пиков схематически показан в виде представления BF на левой стороне ФИГ. 2 и является буфером, который имеет фиксированную по времени длину (в качестве неограничивающего примера) 100 и содержит историю амплитуд пиков для каждого сегмента длительностью 0,25 секунды.
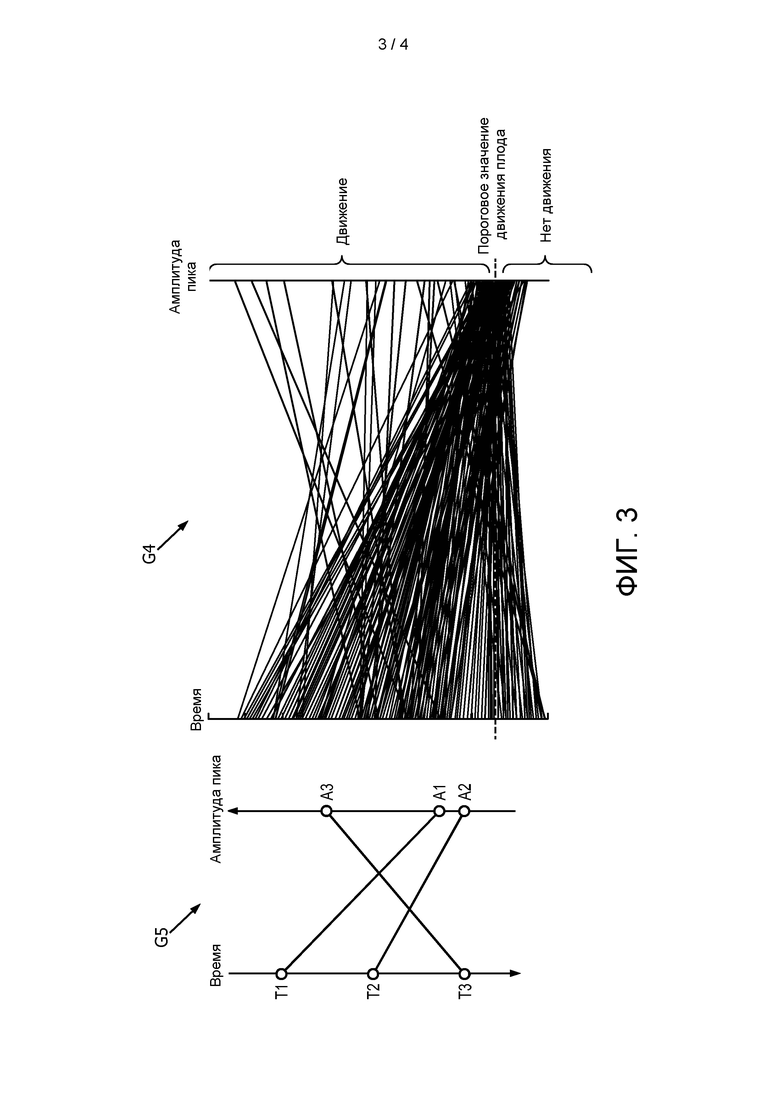
Как также показано на ФИГ. 2 и, кроме того, на ФИГ. 3, в операции 210, изображенной на ФИГ. 2, вычисляют или обновляют пороговое значение движения плода на основе пиков в буфере BF пиков. Вообще, пороговое значение движения плода определяют как амплитуду пика, имеющую самую высокую плотность пиков, наблюдаемую в буфере BF пиков. В целях пояснения выбор порогового значения движения плода показан схематически с использованием графика G4 в параллельных координатах, изображенного на ФИГ. 3. Упрощенный иллюстративный пример графика в параллельных координатах показан в виде схематического примера G5, на котором нанесены данные только для трех пиков. На иллюстративном графике в параллельных координатах данные амплитуды пика для каждой огибающей сегмента доплеровского ультразвукового сигнала наносят на параллельных осях, где одна параллельная ось представляет время, а другая параллельная ось представляет амплитуду пика. Это лучше всего видно на упрощенном графике G5, где показаны только три пика в моменты времени T1, T2, T3 с соответствующими им амплитудами A1, A2, A3 пика. Как лучше всего видно на графике G4 в параллельных координатах, показывающем данные для всего буфера BF пиков (например, 100 временных сегментов в иллюстративном примере), ось амплитуды пика демонстрирует область наивысшей плотности, т. е. область, имеющую наибольшее количество амплитуд пиков. Амплитуду пика с самой высокой плотностью пиков выбирают в качестве порогового значения движения плода, как указано на графике G4. Как было установлено эмпирически, использование этой амплитуды пика, при которой наблюдается наибольшее количество пиков, в качестве порогового значения движения плода является оптимальным выбором для порогового значения движения плода, поскольку маркировка пиков как являющихся движениями плода или не являющихся движениями плода с использованием данного варианта порогового значения обеспечивала наилучшее согласование с полученной реальной информацией, например, указанной матерью, по сравнению с более высоким или более низким пороговым значением. Другим преимуществом является то, что данный вариант порогового значения легко получают из самого доплеровского ультразвукового сигнала в режиме реального времени во время мониторинга плода, как раскрыто в настоящем документе.
На ФИГ. 3 приведена концептуальная иллюстрация выбора в качестве порогового значения движения плода амплитуды пика, имеющего самую высокую плотность пиков в буфере BF пиков. Операцию 210, изображенную на ФИГ. 2, обычно реализовывают не с использованием графика в параллельных координатах, а, скорее, алгоритмически с использованием данных буфера BF пиков, например, соответствующим образом хранящихся в виде точек данных [TS, AMP], где «TS» обозначает временную отметку пика, а «AMP» обозначает амплитуду пика. В одном подходе эти точки данных распределяют по различным сеткам или интервалам амплитуды, и сетку или интервал амплитуды с наибольшим количеством точек данных (т. е. с самым большим количеством пиков, попадающих в этот интервал амплитуд пика) выбирают в качестве порогового значения. Ширину интервалов выбирают так, чтобы она обеспечивала требуемое разрешение для порогового значения движения плода (чем меньше ширина интервала, тем выше разрешение), но при этом была достаточно большой, чтобы подавлять шум, обусловленный ограниченным количеством точек данных.
Это только один иллюстративный алгоритмический подхода к определению амплитуды пика с самой высокой плотностью пиков, и предполагаются и другие алгоритмические подходы. Например, в другом подходе может быть вычислена ядерная оценка плотности (kernel density estimate, KDE) плотности пиков в зависимости от амплитуды пика, и в качестве порогового значения движения плода может быть выбрана амплитуда пика, при которой KDE принимает свое наибольшее значение. В подходе с KDE каждую точку данных (т. е. пик) представляют с помощью гауссового ядра (или другой выбранной функции ядра), центрированного относительно амплитуды пика и имеющего выбранную вариацию вдоль оси амплитуды пика, и эти гауссианы суммируют и нормализуют, чтобы сформировать KDE.
Как показано на ФИГ. 2 и 3, на этапе 212 выбранное на этапе 210 пороговое значение движения плода используют для классификации пиков, как обусловленных движениями плода или не обусловленных движениями плода. Как схематически указано на графике G4 в параллельных координатах, изображенном на ФИГ. 3, любой пик проверяемого сегмента сигнала, амплитуда которого выше выбранного порогового значения движения плода, считают движением плода, тогда как любой пик проверяемого сегмента сигнала, амплитуда которого ниже выбранного порогового значения движения плода, отбрасывают.
Преимуществом является то, что пороговое значение движения плода может быть при необходимости скорректировано динамически для конкретного подвергаемого мониторингу плода. В данном подходе доплеровский ультразвуковой сигнал 202 является частью доплеровского ультразвукового сигнала, получаемого для подвергаемого мониторингу плода, и пороговое значение движения плода адаптивно подстраивают посредством итерации этапов 204, 206, 208, 210 по мере сбора данных доплеровского ультразвукового сигнала. Для начала процесса адаптации порогового значения сначала может быть использован жестко закодированное пороговое значение движения плода по умолчанию, и это пороговое значение по умолчанию регулируют (т.е. адаптируют) с течением времени для конкретного подвергаемого мониторингу плода. В одном подходе к адаптации порогового значения после того, как получен достаточный временной интервал доплеровского ультразвукового сигнала посредством повторения этапов 204, 206, 208 для последовательно получаемых сегментов доплеровского ультразвукового сигнала (например, достаточный для заполнения буфера BF пиков), пороговое значение движения плода определяют посредством выполнения этапа 210 применительно к полному буферу BF пиков. После этого пороговое значение движения плода на выходе этапа 210 может быть зафиксировано для будущего обнаружения движения плода. В альтернативном варианте реализации пороговое значение может быть определено динамически и сделано более точным с течением времени на основе большего количества выборок или более свежих выборок. Например, буфер BF пиков можно рассматривать как буфер типа «первым пришел, первым вышел» (first in-first out, FIFO), так что самые старые данные пиков отбрасываются по мере добавления новых данных пиков в буфер BF, и для адаптивного обновления порогового значения движения плода к содержимому буфера BF пиков время от времени применяют операцию 210.
В другом предполагаемом подходе, который не является адаптивным, от когорты внутриутробных пациентов, которых считают репрезентативными для типичных плодов, могут быть получены тренировочные данные доплеровского ультразвукового сигнала. Эти тренировочные данные доплеровского ультразвукового сигнала служат в качестве ультразвукового сигнала 202, к которому применяют операции 204, 206, 208, 210 для формирования порогового значения движения плода. Затем это «тренировочное» пороговое значение жестко кодируют в программном обеспечении устройства ультразвуковой допплерографии для использования в операции 212, которую в данном варианте реализации выполняют на подвергаемом мониторингу в клинических целях плоде (который обычно не является частью тренировочной когорты), чтобы оценивать движение плода, подвергаемого мониторингом в клинических целях.
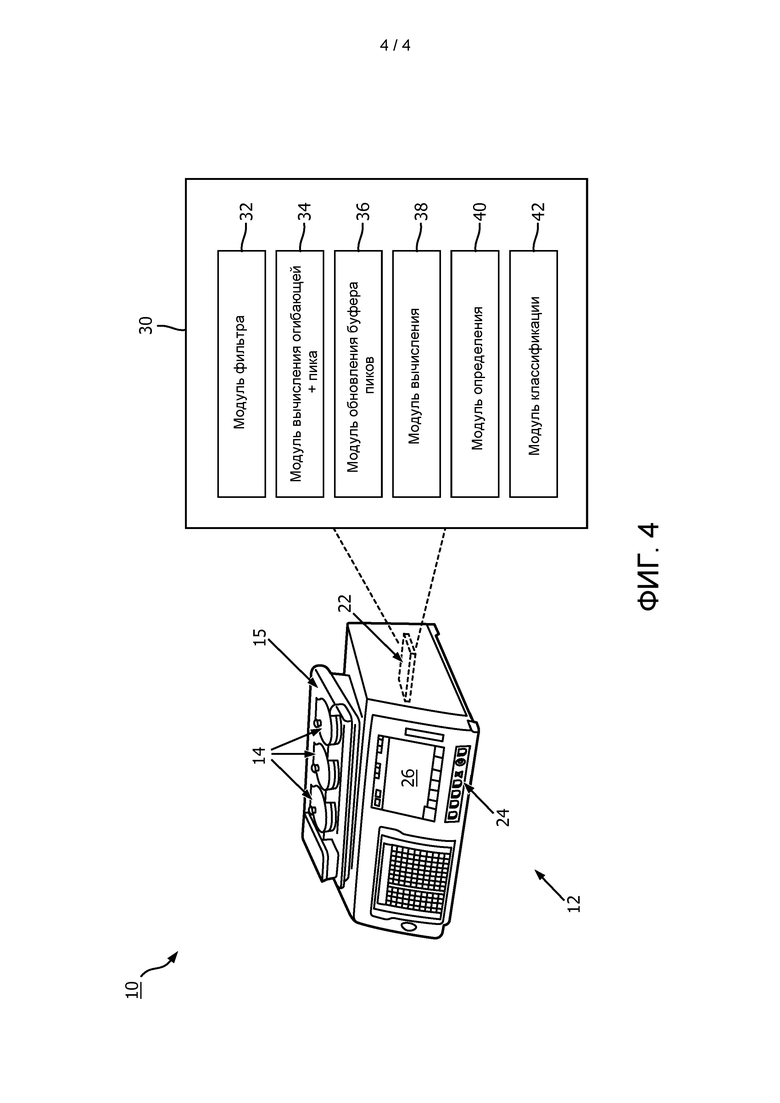
На ФИГ. 4 показано иллюстративное устройство или система 10 доплеровского мониторинга плода, выполненная с возможностью обнаружения движений плода с использованием способа, изображенного на ФИГ. 1 или ФИГ. 2. Как показано на ФИГ. 4, устройство 10 содержит устройство 12 ультразвуковой допплерографии и ультразвуковой датчик 14. На ФИГ. 4 показаны три ультразвуковых датчика 14, расположенных на лотке или приемнике 15 так, чтобы их было удобно использовать с устройством 12 ультразвуковой допплерографии в родильном отделении или ином медицинском учреждение, где могут быть несколько пациентов. Ультразвуковой датчик 14 выполнен с возможностью получения доплеровского ультразвукового сигнала. Например, ультразвуковое устройство 12 может быть закреплено или иным образом прикреплено к брюшной области матери (не показано), носящего плод (не показан) так, чтобы ультразвуковой датчик 14 перекрывал часть плода (например, плод и датчик отделены друг от друга брюшной областью матери). В число некоторых не имеющих ограничительного характера примеров подходящих устройств ультразвуковой допплерографии входят мониторы плода серии Philips Avalon™ с соответствующими комплектующими проводного или беспроводного ультразвукового датчика.
Устройство 12 ультразвуковой допплерографии также содержит типичные компоненты, такие как по меньшей мере один электронный процессор 22 (например, микропроцессор или микроконтроллер и вспомогательная электроника, включающая внутренний компонент, схематически изображенный пунктирными линиями в иллюстративном варианте реализации на ФИГ. 4), различные приводимые в действие пользователем элементы 24 управления для выполнения настройки и управления сеансом мониторинга, а также устройство или компонент 26 отображения. В некоторых вариантах реализации устройство 26 отображения может быть отдельным от устройства 12 ультразвуковой допплерографии компонентом, функционально соединенным проводным или беспроводным образом. Устройство 26 отображения может отображать ультразвуковые изображения, и в целях мониторинга движения плода также отображает информацию о движениях плода, обнаруженных во время операции 112, изображенной на ФИГ. 1, или операции 212, изображенной на ФИГ. 2. Информация о движениях плода может быть отображена различными способами, такими как количество движений плода в течение заданного интервала времени, которое может меняться с течением времени (например, отображение количества движений плода, обнаруженных за последние три минуты).
По меньшей мере один электронный процессор 22 функционально соединен с некратковременным носителем для хранения (не показан), хранящим инструкции, которые могут быть считаны и исполнены по меньшей мере одним электронным процессором 22 для осуществления способа или процесса 30 обнаружения движения плода, включающего основанную на плотности пиков адаптивную коррекцию порогового значения движения плода, как описано в настоящем документе, например, с использованием способа, изображенного на ФИГ. 1 или ФИГ. 2. Некратковременный носитель для хранения может включать, например, накопитель на жестком диске или другой магнитный носитель информации; твердотельный накопитель, флэш-накопитель, электронно стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) или другую электронную память, хранящую прошивку устройства 12 ультразвуковой допплерографии; оптический диск или другое оптическое запоминающее устройство; различные комбинации вышеуказанного и т. п. Некратковременный носитель для хранения может хранить один или более модулей для выполнения операций, показанных на ФИГ. 1 или 2. Например, некратковременный носитель для хранения может содержать модуль 32 фильтра, запрограммированный на фильтрацию доплеровского ультразвукового сигнала (как описано в операциях 102 и 204); модуль 34 вычисления огибающей и пика, запрограммированный на вычисление огибающей из отфильтрованного доплеровского ультразвукового сигнала (как описано в операциях 104 и 206) и на определение пиков в доплеровском ультразвуковом сигнале из огибающей (как описано в операции 106); модуль 36 обновления буфера пиков, запрограммированный на добавление определенного максимального пика в буфер пиков (как описано в операции 208); модуль 38 вычисления, запрограммированный на вычисление плотности пиков из амплитуд извлеченных пиков (как описано в операции 108); модуль 40 определения, запрограммированный на определение динамического порогового значения движения плода из вычисленной плотности (как описано в операциях 110 и 210); и модуль 42 классификации, запрограммированный на классификацию пиков как «движение» или «отсутствие движения» на основе определенного порогового значения движения плода (как описано в операциях 112 и 212). Хотя в иллюстративном примере способ или процесс 100 обнаружения движения плода, изображенный на ФИГ. 1, выполняет встроенный процессор 22 устройства 12 ультразвуковой допплерографии, в других предполагаемых вариантах реализации способ или процесс 100 обнаружения движения плода, изображенный на ФИГ. 1, может быть выполнен посредством облачной обработки, исполняемой на процессоре, функционально соединенном посредством Интернета и/или больничной сети данных и т. п. Кроме того, способы 100 и/или 200 могут быть реализованы с помощью программного обеспечения (например, компьютерной программы или некратковременного компьютерного программного продукта), оборудования (например, накопителя на жестких дисках или другого магнитного носителя информации; твердотельного накопителя, флэш-накопителя, электронно стираемого программируемого постоянного запоминающего устройства (ЭСППЗУ) или другой электронной памяти, хранящей встроенное программное обеспечение; оптического диска или другого оптического носителя информации; различных комбинаций вышеуказанного) или комбинации вышеуказанного.
Настоящее изобретение описано со ссылкой на предпочтительные варианты реализации. По прочтении и понимании предшествующего описания другими людьми могут появиться модификации и изменения настоящего изобретения. Подразумевается, что настоящее изобретение должно рассматриваться как включающее в себя все такие модификации и изменения в той мере, в какой они охвачены объемом прилагаемой формулы изобретения или ее эквивалентов.
Группа изобретений относится к медицине. Способ обнаружения движений плода включает: извлечение пиков из доплеровского ультразвукового сигнала, полученного от субъекта, причем каждый пик из пиков связывают с огибающей сегмента сигнала доплеровского ультразвукового сигнала; вычисление плотности пиков как функции от ячеек сетки амплитуд, причем плотность указывает на количество пиков с амплитудой в каждой сетке амплитуд; выбор порогового значения движения плода на основе вычисленной плотности и определение того, содержит ли сегмент сигнала доплеровского ультразвукового сигнала движение плода, путем сравнения амплитуды пика, связывающего с огибающей сегмента сигнала, с пороговым значением движения плода. Устройство для обнаружения движений плода содержит: доплеровский ультразвуковой датчик для получения доплеровского ультразвукового сигнала от плода и по меньшей мере один электронный процессор, запрограммированный для выполнения приемов способа. Некратковременный компьютерочитаемый носитель информации с хранящимся на нем программным кодом, считываемым и исполняемым одним или более электронными процессорами для осуществления приемов способа. Применение данной группы изобретений позволит улучшить различение истинных движений плода и ложных движений плода. 3 н. и 10 з.п. ф-лы, 4 ил.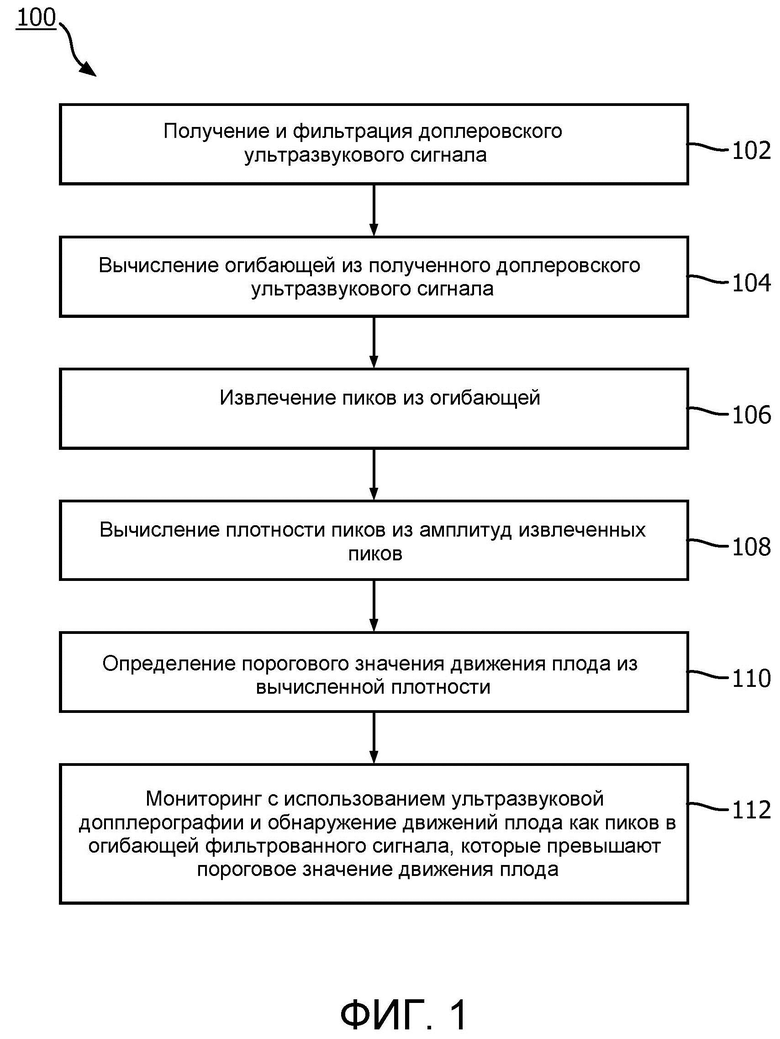
1. Способ (100) обнаружения движений плода, включающий:
извлечение (106) пиков из доплеровского ультразвукового сигнала, полученного от плода, причем каждый пик связывают с огибающей одного из сегментов сигнала доплеровского ультразвукового сигнала;
вычисление (108) плотности пиков как функции от амплитуды пика;
выбор (110) порогового значения движения плода на основе вычисленной плотности пиков и определение (112) того, содержит ли проверяемый сегмент доплеровского ультразвукового сигнала движение плода, путем сравнения амплитуды пика, извлеченной из огибающей проверяемого сегмента доплеровского ультразвукового сигнала, с пороговым значением движения плода.
2. Способ по п. 1, также включающий сегментирование доплеровского ультразвукового сигнала на сегменты сигнала.
3. Способ по п. 2, в котором по меньшей мере два соседних сегмента сигнала перекрываются по времени.
4. Способ по п. 2 или 3, в котором вычисление включает вычисление плотности пиков как функции от сеток амплитуд пиков, причем плотность указывает на количество пиков в каждой сетке амплитуд; а выбор включает выбор порогового значения движения плода как амплитуды пика из сетки амплитуд пиков, в которой вычисленная плотность пиков является максимальной.
5. Способ по п. 1 или 4, в котором проверяемый сегмент доплеровского ультразвукового сигнала получают от того же самого плода, что и доплеровский ультразвуковой сигнал, из которого извлекают пики.
6. Способ по п. 4, в котором извлечение, вычисление и выбор итерируют для адаптивной настройки порогового значения движения плода для данного плода.
7. Способ по п. 4, также включающий: получение доплеровского ультразвукового сигнала, из которого извлекают пики для плода;
сохранение извлеченных пиков в буфере пиков, включающее обновление содержимого буфера пиков во время получения с использованием обновления методом «первым пришел, первым вышел»;
причем извлечение, вычисление и выбор повторяют по мере обновления содержимого буфера пиков для адаптивной настройки порогового значения движения плода для данного плода.
8. Устройство (10) для обнаружения движений плода, содержащее: доплеровский ультразвуковой датчик (14) для получения доплеровского ультразвукового сигнала от плода и
по меньшей мере один электронный процессор (22), запрограммированный на:
извлечение (34) пиков из доплеровского ультразвукового сигнала, причем каждый пик связан с огибающей одного из сегментов сигнала доплеровского ультразвукового сигнала;
вычисление (38) плотности пиков как функции от амплитуды пика;
выбор (40) порогового значения движения плода на основе вычисленной плотности пиков и
определение (42) того, содержит ли проверяемый сегмент доплеровского ультразвукового сигнала движение плода, путем сравнения амплитуды пика, извлеченной из огибающей проверяемого сегмента доплеровского ультразвукового сигнала, с пороговым значением движения плода.
9. Устройство по п. 8, в котором по меньшей мере один электронный процессор также запрограммирован на сегментирование доплеровского ультразвукового сигнала на сегменты сигнала.
10. Устройство по п. 9, в котором по меньшей мере два соседних сегмента сигнала перекрываются по времени.
11. Устройство по п. 8 или 9, в котором по меньшей мере один электронный процессор (22) также запрограммирован на:
вычисление плотности пиков как функции от сеток амплитуд пиков, причем плотность указывает на количество пиков в каждой сетке амплитуд; и
выбор порогового значения движения плода как амплитуды пика из сетки амплитуд пиков, в которой вычисленная плотность пиков является максимальной.
12. Устройство по п. 11, в котором по меньшей мере один электронный процессор также запрограммирован на сохранение извлеченных пиков в буфере пиков, включающее обновление содержимого буфера пиков во время получения с использованием обновления методом «первый пришел, первый вышел», и на повторение сегментации, извлечения, вычисления и выбора по мере обновления содержимого буфера пиков для адаптивной настройки порогового значения движения плода для данного плода.
13. Некратковременный компьютерочитаемый носитель информации с хранящимся на нем программным кодом, считываемым и исполняемым одним или более электронными процессорами для осуществления операций, включающих:
извлечение пиков из доплеровского ультразвукового сигнала, полученного от плода, причем каждый пик связывают с огибающей одного из сегментов сигнала доплеровского ультразвукового сигнала;
вычисление плотности пиков как функции от амплитуды пика;
выбор порогового значения движения плода на основе вычисленной плотности пиков и определение того, содержит ли проверяемый сегмент доплеровского ультразвукового сигнала движение плода, путем сравнения амплитуды пика, извлеченной из огибающей проверяемого сегмента доплеровского ультразвукового сигнала, с пороговым значением движения плода.
| CN 103190913 B, 11.03.2015 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ПОДВИЖНЫХ АНАТОМИЧЕСКИХ СТРУКТУР С ИСПОЛЬЗОВАНИЕМ УЛЬТРАЗВУКА | 2010 |
|
RU2540169C2 |
| УСТРОЙСТВО ДИАГНОСТИКИ СОСТОЯНИЯ ПЛОДА В ДОРОДОВЫЙ ПЕРИОД | 2006 |
|
RU2353290C2 |
| Wen-Shiang Chen, et al | |||
| A comparison of the fragmentation thresholds and inertial cavitation doses of different ultrasound contrast agents | |||
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Janusz WROBEL, et al | |||
| AUTOMATED DETECTION OF FETAL MOVEMENTS | |||

