Изобретение относится к области медицинского приборостроения, в частности к способам ультразвуковой эхолокации внутренних органов, и может быть использовано в системах медицинской диагностики.
Из существующего уровня техники известен ультразвуковой способ измерения частоты сердечных сокращений плода (ЧССП) посредством устройства, которое включает в себя ультразвуковой датчик, блок управления передачей-приемом, высокочастотный усилитель, полосовой фильтр, демодулятор, амплитудный детектор, блок вычисления автокорреляционной функции, формирователь частоты сердцебиений плода (US 5170791 A, опубл. 15.12.1992). Недостатком данного способа является то, что длительность строба приема - интервала времени, в течение которого происходит накопление доплеровского сигнала, а также величина его временного сдвига относительно сигнала излучения являются фиксированными величинами. При этом длительность строба приема выбирается таким образом, чтобы учесть весь диапазон возможных расстояний от датчика до сердца плода. Однако такой выбор длительности строба приема, которая может существенно превышать длительность эхо-сигнала от движущихся структур сердца плода, не является оптимальным с точки зрения согласованной фильтрации эхо-сигнала для получения максимального отношения сигнал-шум. Кроме того, из-за большой длительности строба и, как следствие, отсутствия селекции по глубине локации одновременно с сигналами сердцебиений плода могут регистрироваться мешающие отражения от элементов кровотока в сосудах матери.
Наиболее близким аналогом к заявленному изобретению является способ измерения частоты сердечных сокращений плода, в котором формируют ультразвуковой сигнал излучения, направленный в область расположения сердца плода, после чего принимают отраженный от движущихся структур сердца плода доплеровский сигнал, который, после усиления, преобразуют из аналоговой в цифровую форму. Способ осуществляется с помощью устройства фетального мониторирования, которое содержит ультразвуковой датчик, генератор возбуждения датчика, усилитель, демодулятор, фильтр низких частот, аналого-цифровой преобразователь (АЦП), цифровой процессор сигналов (ЦПС) (WO 2010035022 A1, опубл. 01.04.2010). Недостатком данного технического решения является то, что хотя с целью улучшения отношения сигнал-шум, а также возможности селекции от источников помеховых сигналов и реализован многоглубинный режим приема, но при этом вся глубина зондирования разбивается на небольшое количество участков по глубине зондирования, положение которых фиксировано, а длительность строба приема не связана с размером области сердцебиений плода, что не позволяет достичь максимального отношения сигнал-шум. Кроме того, большая длительность строба приема данных ограничивает возможности отстройки от источников помеховых сигналов, таких как кровеносные сосуды матери.
Задачей, на решение которой направлено заявляемое изобретение, является улучшение отношения сигнал-шум, а также улучшение возможности отстройки от источников помеховых сигналов путем временной селекции сигнала сердцебиений.
Данная задача решается за счет того, что в способе измерения частоты сердечных сокращений плода, согласно изобретению, производят зондирование, для чего формируют ультразвуковой сигнал излучения, направленный в область расположения сердца плода, после чего принимают отраженный от движущихся структур сердца плода доплеровский сигнал, который, после усиления, преобразуют из аналоговой в цифровую форму, причем ультразвуковой сигнал излучения представляет собой серию импульсов, при этом частота повторения импульсов в серии равна несущей частоте ультразвукового сигнала, а частота повторения серий импульсов определяется в зависимости от максимальной глубины зондирования, при этом усиление сигнала выполняют в полосе частот, согласованной с длительностью серии излучения с частотой дискретизации, соответствующей полосе принимаемого сигнала, осуществляют перенос спектра доплеровского сигнала на нулевую частоту с одновременным вычислением его синусных и косинусных составляющих, осуществляют накопление комплексных отсчетов сигнала в соответствии с положением и размером измерительного объема по глубине зондирования, выполняют фильтрацию доплеровского сигнала в заданной полосе частот, осуществляют поиск пиков автокорреляционной функции и определяют расстояние между ними, вычисляют доплеровское смещение на основе вычисления разности фаз между доплеровскими сигналами от последовательных серий ультразвукового сигнала, оценивают ширину спектра доплеровских частот и энергию доплеровского сигнала со всех участков глубины зондирования, а затем осуществляют контроль параметров доплеровских сигналов со всей глубины зондирования, для чего на основе анализа параметров спектра доплеровских частот выполняют выделение участков глубины зондирования, относящихся к сердцебиениями плода, после чего формируют адаптивный строб приема для сигнала сердцебиений плода, в соответствии с которым формируют последующий скорректированный ультразвуковой сигнал.
Техническим результатом, обеспечиваемым приведенной совокупностью признаков, является улучшение качества диагностики задержки развития плода за счет повышения точности вычислений ЧССП путем автоматической установки положения и величины измерительного доплеровского объема в соответствии с положением сердца плода по глубине зондирования за счет формирования адаптивного строба приема для сигнала сердцебиений плода, в соответствии с которым формируют последующий скорректированный ультразвуковой сигнал, при этом контроль параметров сигналов со всех глубин зондирования позволяет исключить ошибки обнаружения сигнала сердцебиений и последующего сопровождения ложного сигнала, например сигнала, порождаемого кровотоком аорты матери. Кроме того, за счет использования цифрового процессора с элементной базой высокой степени интеграции возможно уменьшение габаритов устройства по сравнению с устройствами выделения ЧССП, использующими для построения приемного тракта аналоговые элементы.
Сущность заявленного устройства поясняется чертежами, не охватывающими и, тем более, не ограничивающими объем притязаний по данному решению, а лишь являющимися иллюстрирующими материалами частного случая выполнения устройства.
На чертежах изображено:
на фиг.1 - блок-схема устройства;
на фиг.2 - типичный вид автокорреляционной функции для квазипериодического сигнала;
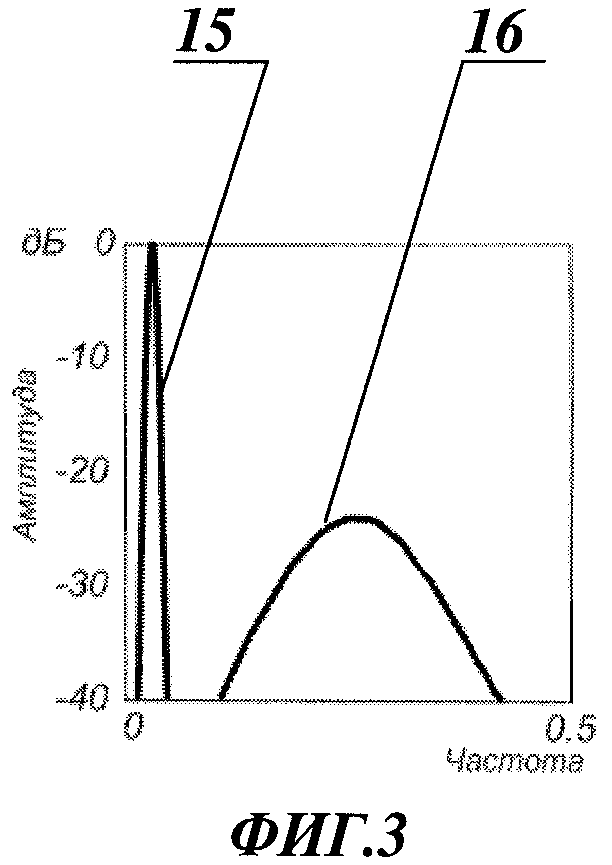
на фиг.3 - вид спектра сигнала сердцебиения плода и сигнала артериального кровотока матери;
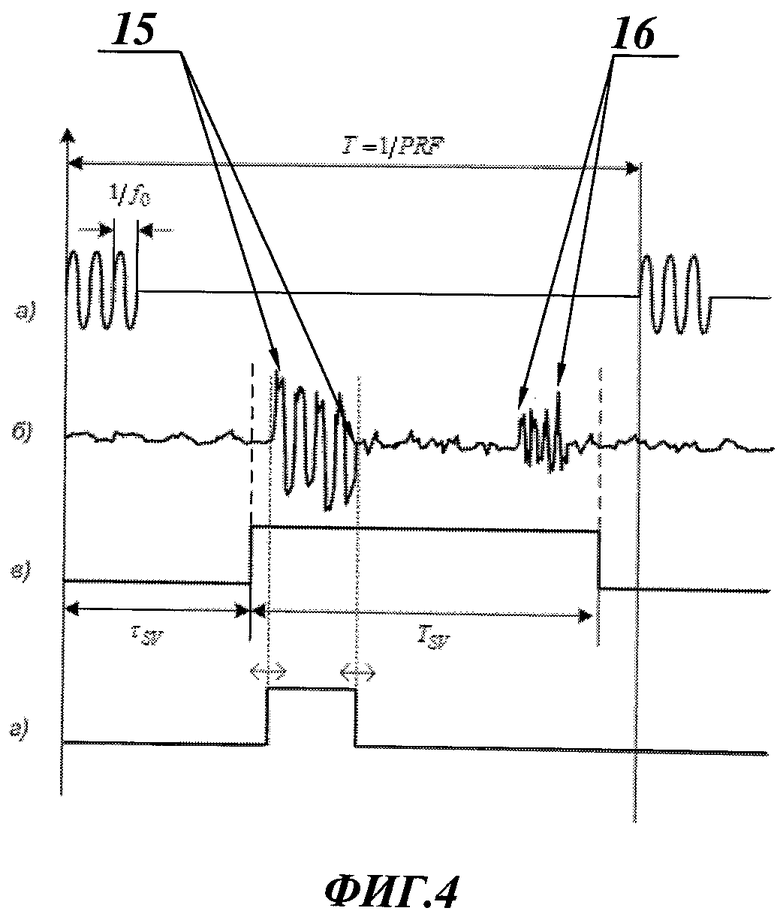
на фиг.4 - временная диаграмма работы приемного тракта при фиксированном стробе приема и строба приема, полученным адаптивным способом в соответствии с настоящим техническим решением.
Способ осуществляют с помощью устройства, которое содержит блок 1 управления передачей-приемом, усилитель 2 мощности, ультразвуковой датчик 3, входной усилитель 4, аналого-цифровой преобразователь (АЦП) 5, цифровой процессор сигналов (ЦПС) 6.
ЦПС 6 содержит формирователь 7 квадратурных составляющих сигнала, формирователь 8 контрольного объема, полосовой фильтр 9, амплитудный детектор 10, автокоррелятор 11, формирователь 12 частоты сердечных сокращений плода (формирователь ЧССП), формирователь 13 параметров доплеровского сигнала, адаптивный формирователь 14 приемного строба.
Под стробом приема в контексте данной заявки понимается интервал времени TSV, в течение которого происходит накопление доплеровского сигнала, а под измерительным (контрольным) объемом - размер участка глубины зондирования DSV, соответствующий стробу приема и рассчитываемый по формуле:
DSV=CTSV/2,
где С=1540 м/с - скорость ультразвука в тканях.
Компоненты устройства связаны между собой следующим образом. Блок 1 управления приемом-передачей соединен с усилителем 2 мощности, аналого-цифровым преобразователем 5 и с формирователем 7 квадратурных составляющих сигналов ЦПС 6, при этом АЦП 5 также соединен с формирователем 7 квадратурных составляющих сигналов.
Ультразвуковой датчик соединен с усилителем мощности, а также с входным усилителем.
Формирователь 7 квадратурных составляющих, формирователь 8 контрольного объема, полосовой фильтр 9, амплитудный детектор 10, автокоррелятор 11, формирователь 12 ЧССП последовательно соединены между собой в составе цифрового процессора 6 сигналов, при этом полосовой фильтр 9 дополнительно соединен с формирователем 8 контрольного объема.
ЦПС может быть реализован как на основе программируемой логической интегральная схемы, так и с помощью цифрового процессора сигналов широкого применения. В обоих случаях габариты используемой элементной базы позволяют разместить весь цифровой процессор сигналов на одной печатной плате. Подключение к цифровому процессору внешних устройств осуществляется с помощью шин данных.
В устройстве электропитание может производиться как от внешнего адаптера, так и от встроенного аккумулятора.
Способ осуществляется предпочтительно посредством описанного устройства следующим образом.
Перед проведением обследования ультразвуковой датчик 3 размещается в абдоминальной области пациентки таким образом, чтобы формируемый ультразвуковой луч был направлен в область расположения сердца плода.
Блок управления 1 передачей-приемом формирует сигнал возбуждения ультразвукового датчика, который подается на вход усилителя 2 мощности. Усилитель 2 мощности производит усиление мощности сигнала, и далее сигнал возбуждения поступает на ультразвуковой датчик 3.
Сигнал излучения представляет собой серию (пачку) импульсов, при этом частота повторения импульсов в серии равна несущей частоте ультразвукового сигнала f0 (порядка 1 МГц), а частота повторения серии импульсов PRF определяется максимальной глубиной зондирования. Например, для максимальной глубины зондирования 24 см частота повторения пачки импульсов составляет величину PRF=3.2 кГц.
На этапе излучения ультразвукового сигнала ультразвуковой датчик 3 осуществляет преобразование электрического сигнала возбуждения датчика в механические колебания, направляемые в исследуемые ткани, и, наоборот, в процессе приема ультразвуковой датчик 3 осуществляет с помощью пьезоэлектрической пластины преобразование механических колебаний, порождаемых отражениями от тканей (доплеровских сигналов) в электрические сигналы.
Принятый датчиком доплеровский сигнал (эхо-сигнал) от движущихся структур сердца плода поступает на входной усилитель 4, который выполняет усиление сигнала в полосе частот, согласованной с длительностью сигнала излучения.
После входного усиления АЦП 5 выполняет преобразование сигнала из аналоговой в цифровую форму с частотой дискретизации FS, соответствующей полосе принимаемого сигнала. Согласно теореме Котельникова такой подход позволяет обеспечить аналого-цифровое преобразование доплеровского сигнала без потери информации. Частота дискретизации сигнала FS задается от блока управления передачей-приемом 1.
Высокоскоростной АЦП 5 позволяет представить доплеровский сигнал на несущей частоте в виде цифровой последовательности отсчетов и производить дальнейшую обработку только в цифровой форме с использованием ЦПС 6. При этом модули обработки сигнала могут быть реализованы как программным, так и аппаратным способом.
Формирователь квадратурных составляющих сигнала 7 осуществляет перенос спектра доплеровского сигнала на нулевую частоту с одновременным образованием его синусных и косинусных составляющих. С этой целью отсчеты доплеровского сигнала, представленные действительными числами, умножаются на значения комплексной экспоненты 
Формирователь 8 контрольного объема выполняет с помощью двух сумматоров накопление комплексных отсчетов сигнала в соответствии с положением и размером измерительного объема по глубине зондирования, что достигается путем соответствующей установки длительности строба приема и его задержки относительно импульса излучения. Его параметры вырабатываются адаптивным формирователем 14 параметров приемного строба.
Полосовой фильтр 9 выполняет фильтрацию сигнала в полосе частот от F1 до F2. При этом частота среза F1 определяет область режекции сигналов помех от источников питания и сигналов, порождаемых нежелательным движением ультразвукового датчика 3, а частота F2 соответствует максимальной частоте доплеровского сигнала. Например, при несущей частоте ультразвукового сигнала f0 порядка 1 МГц полосовая фильтрация осуществляется в диапазоне от 100 Гц до 500 Гц. Результаты полосовой фильтрации одновременно поступают на амплитудный детектор 10 и формирователь параметров доплеровского сигнала 13.
Амплитудное детектирование, выполняемое с помощью амплитудного детектора 10, сводится к вычислению модуля комплексного числа и может быть реализовано как табличным способом, так и с помощью алгоритма итерационного поворота вектора. При использовании метода итерационного поворота вектора для выполнения операции детектирования осуществляется пошаговый поворот в комплексной плоскости вектора, соответствующего комплексному отсчету сигнала. Причем значения последовательности углов и направление поворота на каждом шаге выбираются таким образом, чтобы вектор приближался к оси реальной части комплексных чисел, а число шагов поворота задается исходя из требуемой точности вычислений.
Пример 4-х шагового алгоритма вычисления комплексного числа.
Шаг 1. Поворот вектора с координатами (reX, Im X), соответствующего входному комплексному числу X, в первый квадрант комплексной плоскости путем отбрасывания знаков чисел, т.е.
X0=|reX|, Y0=|imX|.
Шаг 2. Поворот вектора на угол π/4:
Х1=Мах(X0,Y0), Y0=Min(X0,Y0).
Шаг 3. Поворот вектора на угол π/8:
X2=Xl+Q1·Yl, Y2=Yl-Q1·Xl,
где Q1=tg(π/8).
Шаг 4. Поворот вектора на угол π/16:
Х3=Х2+S·Q2·Y2,
где Q2=tg(π/16), S=sign(Y2).
При выполнении трех шагов поворота по данному алгоритму относительная ошибка вычисления модуля комплексного числа не превышает 8%, а после 4-х шагов поворота - 3%.
Автокоррелятор 11 выполняет вычисление в заданный момент времени t нормированной автокорреляционной функции AC(t, τ) для параметра задержки τ=m/Fd по формуле:

где АС(m) - значения автокорреляционной функции, Ak(n)- отсчеты амплитуды доплеровского сигнала на входе автокоррелятора 11, полученные за текущий k-й цикл зондирования, NC - длина корреляции. Из формулы (1) видно, что при вычислении функции автокорреляции выполняется свертка двух фрагментов последовательности отсчетов входного сигнала, сдвинутых на m отсчетов. Вычисления значений автокорреляционной функции можно производить непосредственно по формуле (1). Однако существенное сокращение объема вычислений достигается при использовании метода быстрой свертки на основе быстрого преобразования Фурье (Оппенгейм А., Шафер Р. Цифровая обработка сигналов. М.: Техносфера, 2006).
Автокоррелятор 11 производит вычисление АКФ в интервале значений задержек [1/HRMIN, 1/HRMAX], где соответственно HRMIN - минимально возможное значение ЧССП (порядка 50 ударов в минуту), a HRMAX - максимально возможное значение ЧССП (порядка 240 ударов в минуту).
Вследствие того, что доплеровский сигнал является периодическим с интервалом сердечных сокращений, ТПИ, функция автокорреляции АС(k) будет иметь пики при задержках τ=qТПИ, где q - целое число (см. фиг.2).
Поскольку расстояние между пиками автокорреляционной функции и есть величина пульсового интервала ТРИ, то формирователь 12 ЧССП осуществляет поиск пиков автокорреляционной функции и определяет расстояние между ними.
В формирователе 13 параметров доплеровского сигнала производится оценка параметров доплеровского сигнала по глубине зондирования на основе автокорреляционного метода. Автокорреляционный метод позволяет определить доплеровское смещение на основе вычисления разности фаз между доплеровскими сигналами от последовательных зондирований. Причем разность фаз определяется между доплеровскими сигналами с одних и тех же участков глубины. Наряду с доплеровским смещением автокорреляционный метод позволяет оценить ширину спектра доплеровских частот и энергию доплеровского сигнала. Именно на основе формирования и анализа этих параметров сначала выполняется выделение всех участков доплеровского сигнала по глубине зондирования, а затем на основе анализа параметров доплеровского сигнала выделенных участков глубины зондирования - области доплеровского сигнала, обусловленной сердцебиениями плода.
В соответствии с автокорреляционным методом для k-го интервала глубины зондирования значение средней доплеровской частоты Vk и ширина спектра доплеровских частот ΔVk вычисляются по формулам:


где


Vmax=PRF/2 - максимальная измеряемая скорость;
Rk(T) - оценка автокорреляционной функции;
Pk - значение мощности доплеровского сигнала;
Uk[n·Т] - отсчет сигнала с выхода полосового фильтра 9, соответствующий k-му интервалу глубины в n-м такте зондирования, представляющий собой комплексное число: Uk[n·T]=reUk[n·T]+j·imUk[n·T];
N≥2 - число тактов зондирования для формирования одной линии ЦДК;
Т=1/PRF - период повторения импульсов зондирования;
* - операция комплексного сопряжения.
Выделение строба приема для сигнала сердцебиений плода выполняется в адаптивном формирователе 14 приемного строба в два этапа:
- на первом этапе выделяются участки глубины зондирования, на которых регистрируется доплеровский сигнал;
- на втором этапе из всех выделенных участков доплеровского сигнала выбирается участок, соответствующий сердцебиениям плода.
Выделение участков регистрации доплеровского сигнала производится путем пороговой обработки сформированных значений мощности доплеровского сигнала {Pn}. Область зондирования, для которой мощность доплеровского сигнала превышает заданное пороговое значение, соответствует положению движущихся структур, к которым могут относиться как сердце плода, так и элементы кровотока матери.
Участок глубины зондирования доплеровского сигнала, относящегося к сердцебиениям плода, среди всех выделенных на первом этапе участков регистрации доплеровского сигнала выделяется по следующим признакам:
- средняя частота сигнала сердцебиения плода Vk меньше средней частоты сигнала кровотока;
- сигнал сердцебиения плода имеет более узкую полосу частот ΔVk по сравнению с сигналом кровотока;
- Энергия доплеровского сигнала сердцебиения плода P k больше энергии сигнала кровотока.
При этом вычисление параметров Vk, ΔVk, P k для каждого участка глубины, на котором регистрируется доплеровский сигнал, производится соответственно по формулам (2), (3) и (5). Типичный вид спектра сигнала сердцебиения плода и сигнала артериального кровотока матери проиллюстрирован на фиг.3. В отличие от спектра сигнала кровотока спектр сигнала сердцебиения плода располагается в области низких частот, имеет большую амплитуду и более узкую полосу частот.
На фиг.4 представлены стандартный фиксированный строб приема (см. график в на фиг.4) и строб приема, полученный адаптивным способом в соответствии с настоящим техническим решением (см. график г на фиг.4). Параметры фиксированного строба (график в на фиг.4) выбираются таким образом, чтобы задержка τSV относительно импульса излучения (график а на фиг.4) и его длительность TSV соответствовали анализируемой глубине зондирования. Вследствие большой длительности строба приема в выделяемый им временной интервал могут попасть как сигнал 15 сердцебиений плода, так сигнал 16 от кровеносного сосуда матери (см. график 6 на фиг.4). Кроме того, длительность строба значительно превышает длительность сигнала сердцебиений, что не является оптимальным для получения максимального отношения сигнал-шум. Этих недостатков лишен приемный строб (см. график г на фиг.4), полученный адаптивным способом в соответствии с настоящим техническим решением. В данном случае при изменении положения плода в процессе обследования будут изменяться положение и размер приемного строба таким образом, чтобы обеспечить регистрацию только доплеровских сигналов от движущихся тканей сердца плода.
Таким образом, сущность способа заключается в том, что ультразвуковой сигнал излучения представляет собой серию импульсов, при этом частота повторения импульсов в серии равна несущей частоте ультразвукового сигнала f0, а частота повторения серий импульсов PRF определяется в зависимости от максимальной глубины зондирования, при этом усиление сигнала выполняют в полосе частот, согласованной с длительностью серии излучения с частотой дискретизации FS, соответствующей полосе принимаемого сигнала, осуществляют перенос спектра доплеровского сигнала на нулевую частоту с одновременным вычислением его синусных и косинусных составляющих, осуществляют накопление комплексных отсчетов сигнала в соответствии с положением и размером измерительного объема по глубине зондирования, выполняют фильтрацию доплеровского сигнала в заданной полосе частот, осуществляют поиск пиков автокорреляционной функции и определяют расстояние между ними, вычисляют доплеровское смещение на основе вычисления разности фаз между доплеровским сигналами от последовательных серий ультразвукового сигнала, оценивают ширину спектра доплеровских частот и энергию доплеровского сигнала со всех участков глубины зондирования, а затем осуществляют контроль параметров доплеровских сигналов со всей глубины зондирования для чего на основе анализа параметров спектра доплеровских частот выполняют выделение участков глубины зондирования, относящихся к сердцебиениями плода, после чего формируют адаптивный строб приема для сигнала сердцебиений плода, в соответствии с которым формируют последующий скорректированный ультразвуковой сигнал.
Автоматическая система отслеживания положения сердца плода и его размера по глубине локации реализуется в настоящем изобретении на основе полностью цифрового тракта приема и обработки доплеровского сигнала. Аналого-цифровой преобразователь осуществляет преобразование доплеровского сигнала в цифровую форму непосредственно на несущей частоте, и все последующие этапы цифровой обработки доплеровского сигнала после аналого-цифрового преобразования реализуются цифровым процессором сигналов. При этом за счет применения элементной базы высокой степени интеграции уменьшаются габариты устройства по сравнению с устройствами выделения ЧССП, использующими для построения приемного тракта аналоговые элементы.
Таким образом, адаптивная установка приемного строба позволяет сузить величину измерительного доплеровского объема до размеров области сердцебиениям плода и установить положение измерительного объема в соответствии с нахождением сердца плода по глубине зондирования. А контроль параметров доплеровских сигналов со всех глубин зондирования (эхолокации) позволяет исключить ошибки обнаружения сигнала сердцебиений и последующего сопровождения ложного сигнала, например сигнала, порождаемого кровотоком аорты матери.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство многолучевого приема ультразвуковых сигналов | 2015 |
|
RU2631049C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ РЕГИСТРАЦИИ ПРОЦЕССОВ СЕРДЦЕБИЕНИЯ И ДЫХАНИЯ ПАЦИЕНТА | 2012 |
|
RU2496410C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| Способ спектрально-корреляционного обнаружения летательных аппаратов по квазинепрерывным импульсным сигналам бортовых радиоэлектронных систем | 2021 |
|
RU2768370C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПЛОДА ВО ВРЕМЯ БЕРЕМЕННОСТИ | 1995 |
|
RU2103919C1 |
| УЛЬТРАЗВУКОВОЕ ДИАГНОСТИЧЕСКОЕ УСТРОЙСТВО | 2002 |
|
RU2221494C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ДИФФЕРЕНЦИРОВКИ МИКРОЭМБОЛОВ В МОЗГОВОМ КРОВОТОКЕ ПОСРЕДСТВОМ УЛЬТРАЗВУКОВОЙ ДОППЛЕРОВСКОЙ СИСТЕМЫ | 2015 |
|
RU2587310C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ НЕПОДВИЖНЫХ ОБЪЕКТОВ С ПОМОЩЬЮ ШУМОВОГО СИГНАЛА И ШУМОВАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ, РЕАЛИЗУЮЩАЯ ДАННЫЙ СПОСОБ | 2024 |
|
RU2831136C1 |


Способ относится к области медицины. При осуществлении способа производят зондирование с помощью ультразвукового сигнала, направленного в область расположения сердца плода. Отраженный доплеровский сигнал усиливают и преобразуют в цифровую форму. При этом ультразвуковой сигнал излучения представляет собой серию импульсов, где частота их повторения равна несущей частоте ультразвукового сигнала и определяется в зависимости от максимальной глубины зондирования. Усиление сигнала выполняют в полосе частот, согласованной с длительностью серии излучения с частотой дискретизации, соответствующей полосе принимаемого сигнала. Осуществляют перенос спектра доплеровского сигнала на нулевую частоту и накопление комплексных отсчетов сигнала в соответствии с положением и размером измерительного объема по глубине зондирования. Выполняют фильтрацию доплеровского сигнала в заданной полосе частот. Осуществляют поиск пиков автокорреляционной функции и определяют расстояние между ними. Вычисляют доплеровское смещение на основе вычисления разности фаз между доплеровскими сигналами от последовательных серий ультразвукового сигнала. Оценивают ширину спектра доплеровских частот и энергию доплеровского сигнала со всех участков глубины зондирования. Далее осуществляют контроль параметров доплеровских сигналов со всей глубины зондирования, для чего на основе анализа параметров спектра доплеровских частот выполняют выделение участков глубины зондирования, относящихся к сердцебиениям плода. После чего формируют адаптивный строб приема для сигнала сердцебиений плода, в соответствии с которым формируют последующий скорректированный ультразвуковой сигнал. Изобретение позволяет повысить точность вычисления частоты сердечных сокращений плода путем автоматической установки положения и величины измерительного доплеровского объема в соответствии с положением сердца плода по глубине зондирования. 4 ил.
Способ измерения частоты сердечных сокращений плода, в котором производят зондирование, для чего формируют ультразвуковой сигнал излучения, направленный в область расположения сердца плода, после чего принимают отраженный от движущихся структур сердца плода доплеровский сигнал, который, после усиления, преобразуют из аналоговой в цифровую форму, отличающийся тем, что ультразвуковой сигнал излучения представляет собой серию импульсов, при этом частота повторения импульсов в серии равна несущей частоте ультразвукового сигнала, а частота повторения серий импульсов определяется в зависимости от максимальной глубины зондирования, при этом усиление сигнала выполняют в полосе частот, согласованной с длительностью серии излучения с частотой дискретизации, соответствующей полосе принимаемого сигнала, осуществляют перенос спектра доплеровского сигнала на нулевую частоту с одновременным вычислением его синусных и косинусных составляющих, осуществляют накопление комплексных отсчетов сигнала в соответствии с положением и размером измерительного объема по глубине зондирования, выполняют фильтрацию доплеровского сигнала в заданной полосе частот, осуществляют поиск пиков автокорреляционной функции и определяют расстояние между ними, вычисляют доплеровское смещение на основе вычисления разности фаз между доплеровским сигналами от последовательных серий ультразвукового сигнала, оценивают ширину спектра доплеровских частот и энергию доплеровского сигнала со всех участков глубины зондирования, а затем осуществляют контроль параметров доплеровских сигналов со всей глубины зондирования, для чего на основе анализа параметров спектра доплеровских частот выполняют выделение участков глубины зондирования, относящихся к сердцебиениями плода, после чего формируют адаптивный строб приема для сигнала сердцебиений плода, в соответствии с которым формируют последующий скорректированный ультразвуковой сигнал.
| WO 2010035022 A1, 01.04.2010 | |||
| УСТРОЙСТВО НЕИНВАЗИВНОЙ ДИАГНОСТИКИ СЕРДЕЧНОЙ ДЕЯТЕЛЬНОСТИ ПЛОДА И СПОСОБЫ ЕГО ПРИМЕНЕНИЯ | 2008 |
|
RU2387370C2 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ МАЛОГАБАРИТНЫЙ АНАЛИЗАТОР ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПЛОДА ВО ВРЕМЯ БЕРЕМЕННОСТИ | 2008 |
|
RU2404710C2 |
| GB 1503169 A, 08.03.1978 | |||
| Janusz Jezewski at al | |||
| A novel technique for fetal heart rate estimation from Doppler ultrasound signal, Biomed Eng Online | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |

