Область техники
[0001] Настоящее изобретение по существу относится к гидродинамическим подшипникам с отдельными вкладышами направляющего подшипника и более конкретно к гидродинамическим подшипникам, используемым в гидроэлектрической промышленности.
Уровень техники
[0002] Гидроэлектрические турбогенераторные агрегаты вырабатывают электрическую энергию с использованием возобновляемых источников энергии и не сжигают ископаемое топливо. Турбина преобразует кинетическую энергию потока воды в механическую энергию вращения. Вал, соединенный с турбиной, передает механическую энергию к узлу ротора в генераторе. Далее генератор преобразует механическую энергию в электрическую энергию.
[0003] Генератор может включать в себя корпус генератора, который заключает в себе узел статора и встроенный узел ротора. Неподвижный узел статора может включать в себя множество обмоток. Узел ротора может включать в себя множество магнитов, выполненных с возможностью вращения внутри узла статора относительно обмоток статора. Небольшой воздушный зазор отделяет узел ротора от узла статора. Вал передает механическую энергию от турбины для вращения узла ротора. При вращении узла ротора перемещение магнитов мимо неподвижных обмоток статора вырабатывает электрический ток в обмотках. Затем произведенную электроэнергию можно передавать для дальнейшей обработки, хранения или распределения.
[0004] Гидроэлектрические турбинные агрегаты, как правило, имеют гидродинамические направляющие подшипники, расположенные смежно с валом, под и/или над генератором. Опорно-упорный подшипник также может быть расположен над генератором. Направляющий подшипник может включать в себя множество отдельных вкладышей (или «башмаков») направляющего подшипника, выполненных с возможностью снижения трения, облегчения вращательного движения вала во время работы, сопротивления боковым силам во время сбоев и центрирования вала в корпусе вала. Вкладыши направляющего подшипника могут быть расположены кольцеобразно внутри корпуса вала. При наличии вала вкладыши направляющего подшипника определяют радиальный зазор направляющего подшипника между вкладышами направляющего подшипника и валом. Уплотнение вала может располагаться под и над вкладышами направляющего подшипника для удерживания гидродинамической текучей среды (как правило, масла или воды). Текучая среда заполняет пространство между валом, корпусом вала и уплотнениями вала, включая радиальный зазор направляющего подшипника. В идеальном случае вал вращается вплотную к пленке текучей среды, расположенной между вкладышами направляющего подшипника и вращающимся валом. В процессе работы эта пленка текучей среды находится по существу под высоким давлением из-за относительного перемещения вала к вкладышам, чтобы сопротивляться перпендикулярным силам и силам, вызванным неисправностями, и поддерживать вал в центре. Однако на практике ширина радиального зазора направляющего подшипника может значительно отличаться в зависимости от температуры окружающей среды системы подшипника.
Сущность изобретения
[0005] В соответствии с некоторыми аспектами настоящего описания в настоящем документе описаны способы, конструкции и компьютерные программные продукты, которые могут уменьшать влияние колебаний радиального зазора направляющего подшипника между вкладышами направляющего подшипника и валом узла турбины, таком как гидроэлектрический узел турбины.
[0006] В некоторых вариантах осуществления изобретения проблему вибраций вала из-за колебаний расстояния в радиальном зазоре направляющего подшипника во вращающейся машине, имеющей гидродинамический подшипник, решают с помощью системы, выполненной с возможностью отслеживания радиального зазора и регулировки местоположения одного или более вкладышей направляющего подшипника относительно вала при работе вращающейся машины.
[0007] В одном аспекте предложен способ поддержания радиального зазора между регулируемым направляющим подшипником и валом турбины. В одном варианте осуществления способ может включать измерение базового радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины. Регулятор вкладыша может находиться в зацеплении с по меньшей мере одним направляющим подшипником. Регулятор вкладыша может включать в себя основной привод в соединении с по меньшей мере одним направляющим подшипником через передаточный механизм, причем регулятор вкладыша приводится в действие движущим усилием от основного привода, который перемещает по меньшей мере один направляющий подшипник в направлении регулировки радиального зазора. Способ может дополнительно включать измерение отклонений радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины. Способ также включает вычисление разности между отклонениями радиального зазора и базовым радиальным зазором. В некоторых вариантах осуществления способ включает приведение в действие основного привода для регулировки по меньшей мере одного направляющего подшипника с целью компенсации разности между отклонениями радиального зазора и базовым радиальным зазором. В некоторых вариантах осуществления способ представляет собой реализуемый на компьютере способ.
[0008] В другом аспекте настоящего описания предложена система направляющего подшипника. В одном варианте осуществления система направляющего подшипника может включать в себя систему регулировки вкладыша для перемещения по меньшей мере одного подшипника в направлении регулировки радиального зазора. Радиальный зазор представляет собой расстояние между крайним концом вала по меньшей мере одного вкладыша подшипника и крайним периметром узла вала. Система может дополнительно включать в себя датчик для измерения отклонений радиального зазора. В некоторых вариантах осуществления система направляющего подшипника включает в себя контроллер, который принимает сигнал о расстоянии от датчика, измеряющего радиальный зазор, и дает команду системе регулировки вкладыша на перемещение по меньшей мере одного подшипника для компенсации отклонений радиального зазора.
[0009] В другом варианте осуществления система направляющего подшипника может включать в себя систему зубчатой передачи и регулятор вкладыша, находящийся в механическом зацеплении с системой зубчатой передачи. Регулятор вкладыша может иметь конец вкладыша, расположенный в дистальном направлении от системы зубчатой передачи, причем конец вкладыша находится в зацеплении с вкладышем подшипника. Система направляющего подшипника может дополнительно включать в себя основной привод, находящийся в зацеплении с системой зубчатой передачи таким образом, чтобы основной привод не был коллинеарен с радиальной линией, расположенной на радиальной плоскости, определяемой центром вращения вала. Датчик приближения может быть выполнен с возможностью определения размера радиального зазора между вкладышем подшипника и валом. Датчик приближения генерирует сигнал о расстоянии и передает сигнал о расстоянии в систему управления. В некоторых вариантах осуществления система управления сравнивает сигнал измерения расстояния с запрограммированным диапазоном, причем система управления отправляет корректирующий сигнал на основной привод, если сигнал измерения расстояния не соответствует запрограммированному диапазону. В некоторых вариантах осуществления основной привод находится в зацеплении с червячным приводом системы зубчатой передачи, который находится в зацеплении с червячным колесом и выполнен с возможностью поворота червячного колеса. Червячное колесо может быть выполнено с возможностью поворота регулятора вкладыша. Регулятор вкладыша может быть выполнен с возможностью перемещения вкладыша направляющего подшипника вдоль радиальной плоскости, определяемой центром вращения вала.
[0010] Преимущество примера системы может заключаться в непрерывном отслеживании и регулировании радиального зазора направляющего подшипника в ответ на термическое расширение вала, в результате чего сохраняется оптимальный радиальный зазор направляющего подшипника во время запуска и на протяжении всей работы вращающейся машины. Более того, радиальный направляющий зазор иногда резко изменяется во время работы в ответ на нарушение рабочего состояния. Нарушение рабочего состояния может быть результатом гидравлических возмущений, неисправности в электросети, внезапного срабатывания тормозов турбины, столкновения ротора турбины с большим куском продуктов износа или какого-либо другого незапланированного случая при работе. Дополнительным преимуществом примеров систем, описанных в настоящем документе, может быть защита от обратного хода, который в противном случае может возникать в результате описанных выше условий нарушения рабочего состояния.
[0011] Было обнаружено, что путем конфигурирования основного привода для зацепления с системой зубчатой передачи неколлинеарно относительно реального или потенциального линейного перемещения регулятора вкладыша пример системы регулировки направляющего подшипника защищает от неожиданного обратного хода, который в противном случае мог бы повредить систему регулировки подшипника или привести к потере направления вала. Обратный ход также может сокращать зазор между вращающимися и неподвижными компонентами. Без привязки к какой-либо теории предполагается, что неколлинеарное зацепление может обеспечивать достаточное противоусилие для преодоления сил обратного хода. Регулировочный болт направляющего подшипника может регулировать вкладыши направляющего подшипника в радиальном направлении к вращающимся частям или от них. Без привязки к какой-либо теории считается, что порядок размещения червячного привода и обслуживание червячного колеса могут защищать основной привод от обратного хода от вкладыша направляющего подшипника. В одном варианте осуществления основной привод передает сигнал тестовый сигнал о местоположении системе управления в качестве проверки безопасности.
[0012] В другом аспекте предложена система управления, которую можно применять с описанными выше способами и конструкциями для поддержания радиального зазора между системой регулируемого направляющего подшипника и валом турбины. В одном варианте осуществления система управления может включать в себя по меньшей мере один модуль запоминающего устройства для хранения значений базового радиального зазора для расстояния между по меньшей мере одним направляющим подшипником и валом турбины. Система управления может включать в себя приемник для приема измеренных отклонений радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины. В некоторых вариантах осуществления система управления может дополнительно включать в себя анализатор корректирующего радиального зазора, использующий аппаратный процессор для выполнения набора команд с целью сравнения измеренных отклонений радиального зазора со значениями базового радиального зазора для обеспечения размера корректирующего радиального зазора. Система управления дополнительно включает в себя по меньшей мере один генератор сигнала в соединении с регулятором вкладыша, который перемещает этот по меньшей мере один направляющий подшипник в направлении регулировки радиального зазора.
[0013] В еще одном аспекте предложен компьютерный программный продукт, который включает в себя машиночитаемый носитель данных, имеющий реализованный в нем машиночитаемый программный код для поддержания радиального зазора между регулируемым направляющим подшипником и валом турбины. В одном варианте осуществления машиночитаемый носитель данных является энергонезависимым. Машиночитаемый программный код может обеспечивать стадии измерения базового радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины. Регулятор вкладыша может находиться в зацеплении с по меньшей мере одним направляющим подшипником. Регулятор вкладыша может включать в себя основной привод в соединении с по меньшей мере одним направляющим подшипником через передаточный механизм, причем регулятор вкладыша, приведенный в действие движущим усилием от основного привода, перемещает этот по меньшей мере один направляющий подшипник в направлении регулировки радиального зазора. Способ может дополнительно включать измерение отклонений радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины и вычисление разности между отклонениями радиального зазора и базовым радиальным зазором. В некоторых вариантах осуществления способ включает приведение в действие основного привода для регулировки по меньшей мере одного направляющего подшипника с целью компенсации разности между отклонениями радиального зазора и базовым радиальным зазором.
Краткое описание чертежей
[0014] Вышеизложенное станет очевидным из следующего более подробного изложения примеров осуществления описания, как показано на сопроводительных чертежах, на которых одинаковые ссылочные позиции относятся к одним и тем же частям на разных видах. Графические материалы не обязательно выполнены в масштабе, вместо этого акцент сделан на иллюстрации описанных вариантов осуществления. На чертежах:
[0015] Фиг. 1 - блок-схема, на которой показан способ регулирования местоположения вкладышей направляющего подшипника для уменьшения влияния колебаний радиального зазора направляющего подшипника, в соответствии с одним из вариантов осуществления настоящего описания;
[0016] Фиг. 2 - вид в перспективе примера системы регулировки направляющего подшипника со снятой для ясности крышкой редуктора, на котором показаны по меньшей мере вал турбины, вкладыш направляющего подшипника и радиальный зазор между боковой стенкой вала и вкладышем направляющего подшипника, в соответствии с одним вариантом осуществления настоящего описания;
[0017] Фиг. 3A-3B - виды в перспективе некоторых вариантов осуществления системы регулировки направляющего подшипника, включая цепь и звездочку в качестве передаточного механизма между основным приводом и регулируемыми направляющими подшипниками;
[0018] Фиг. 4 - вид в перспективе примера системы регулировки направляющего подшипника, включая круговую зубчатую рейку и шестерню в качестве передаточного механизма между основным приводом и регулируемыми направляющими подшипниками;
[0019] Фиг. 5 - вид в перспективе примера системы регулировки направляющего подшипника, включая рычажный механизм и шестерни в качестве передаточного механизма между основным приводом и регулируемыми направляющими подшипниками;
[0020] Фиг. 6 - вид в перспективе в поперечном сечении примера системы регулировки направляющего подшипника, содержащей клиновую систему в качестве передаточного механизма между основным приводом и регулируемыми направляющими подшипниками;
[0021] Фиг. 7 - блок-схема, на которой показан первый вариант осуществления системы для регулировки местоположения вкладышей направляющего подшипника с целью уменьшения влияния колебаний радиального зазора направляющего подшипника, в соответствии с настоящим описанием;
[0022] Фиг. 8 - блок-схема, иллюстрирующая систему, которая может включать в себя систему для регулировки местоположения вкладышей направляющего подшипника, показанную на Фиг. 7, в соответствии с одним вариантом осуществления настоящего описания; и
[0023] Фиг. 9 - блок-схема, на которой показаны возможные пути прохождения сигналов для сигнала о расстоянии.
Подробное описание изобретения
[0024] Приведенное ниже подробное описание предпочтительных вариантов осуществления представлено только в целях иллюстрации и описания и не должны толковаться как исчерпывающие или ограничивающие объем и сущность настоящего изобретения. Варианты осуществления были выбраны и описаны для лучшего объяснения принципов изобретения и его практического применения. Обычному специалисту в данной области будет понятно, что изобретение, раскрытое в настоящем описании, может иметь множество вариаций без отступления от сущности и объема изобретения.
[0025] Соответствующие элементы на разных видах обозначены соответствующими условными обозначениями. Несмотря на то, что чертежи представляют варианты осуществления различных элементов и компонентов в соответствии с настоящим описанием, чертежи необязательно масштабировать, и некоторые элементы могут быть увеличены для лучшей иллюстрации вариантов осуществления настоящего описания, и такие иллюстративные примеры не следует рассматривать как каким-либо образом ограничивающие объем настоящего описания.
[0026] Ссылки в описании на «один вариант осуществления», «вариант осуществления», «пример осуществления» и т.д. означают, что описанный вариант осуществления может включать в себя конкретный признак, конструкцию или характеристику, однако каждый вариант осуществления не обязательно включает в себя данный конкретный признак, конструкцию или характеристику. Более того, такие выражения не обязательно относятся к одному и тому же варианту осуществления. Кроме того, когда конкретный признак, конструкция или характеристика описаны в связи с вариантом осуществления, считается, что специалисту в данной области будет понятно, что это влияет на такой признак, структуру или характеристику в связи с другими вариантами осуществления независимо от того, описаны они явным образом или нет.
[0027] Хотя в описании ниже для ясности используются конкретные термины, предполагается, что эти термины относятся только к конкретной конструкции варианта осуществления, выбранного для иллюстрации на рисунках, и не предназначены для определения или ограничения объема описания.
[0028] Все элементы, указанные в единственном числе, также могут быть использованы и во множественном, если контекст явно не диктует иное. Следует понимать, что числовые значения включают в себя числовые значения, которые одинаковы при уменьшении до того же числа значимых цифр и числовых значений, которые отличаются от указанных значений на число, меньшее чем экспериментальная погрешность обычной методики измерения описанного в настоящей заявке типа, для определения значения.
[0029] Все диапазоны, описанные в настоящем документе, включают упомянутую конечную точку и независимо комбинируются (например, диапазон «от 2 граммов до 10 граммов» включает конечные точки 2 грамма и 10 граммов и все промежуточные значения).
[0030] Используемые в настоящем документе приблизительные формулировки можно применять для модификации любого количественного представления, которое можно изменять, не приводя к изменению основной функции, к которой оно относится. Соответственно, значение, модифицированное с помощью термина или терминов, таких как «около» или «по существу», может не быть ограничено точными указанными значениями. Модификатор «около» следует также рассматривать как описывающий диапазон, определяемый абсолютными значениями двух конечных точек. Например, выражение «от около 2 до около 4» также описывает диапазон «от 2 до 4».
[0031] Следует отметить, что многие термины, используемые в настоящем документе, представляют собой относительные термины. Например, термины «верхний» и «нижний» соотносятся друг с другом по местоположению, т.е. верхний компонент расположен на большей высоте, чем нижний компонент в заданной ориентации, но эти термины могут меняться при переворачивании устройства. Термины «впускное отверстие» и «выпускное отверстие» относятся к текучей среде, протекающей через них по отношению к данной конструкции, например, текучая среда течет через впускное отверстие в конструкцию и вытекает через выпускное отверстие из конструкции. Термины «выше по потоку» и «ниже по потоку» относятся к направлению, в котором текучая среда протекает через различные компоненты, т.е. поток текучих сред через расположенный выше по потоку компонент до протекания через расположенный ниже по потоку компонент.
[0032] Термины «горизонтальный» и «вертикальный» используются для указания направления относительно абсолютного ориентира, т.е. уровня земли. Однако эти термины не следует толковать как требующие, чтобы конструкции были абсолютно параллельны или абсолютно перпендикулярны друг другу. Например, первая вертикальная конструкция и вторая вертикальная конструкция необязательно параллельны друг другу. Термины «верх» и «низ» или «основание» используются для обозначения мест/поверхностей, где верх всегда выше, чем низ/основание относительно абсолютного ориентира, т.е. поверхности Земли. Термины «вверх» и «вниз» также используются относительно абсолютного ориентира; восходящий поток всегда противостоит гравитации Земли.
[0033] Термин «непосредственно» при использовании для обозначения двух компонентов системы, таких как клапаны или насосы или другие устройства управления или датчики (например, температуры или давления), означает, что первый компонент и второй компонент соединены без какого-либо промежуточного компонента, такого как клапаны или насосы или другие устройства управления или датчики (например, температуры или давления), на границе двух компонентов.
[0034] Гидроэлектрические турбинные агрегаты, как правило, имеют гидродинамические направляющие подшипники, расположенные смежно с валом, под и/или над генератором. Направляющий подшипник может содержать множество отдельных вкладышей (или «башмаков») направляющего подшипника, выполненных с возможностью снижения трения, облегчения вращательного движения вала во время работы, сопротивления боковым силам во время сбоев и центрирования вала в корпусе вала. Вкладыши направляющего подшипника, как правило, расположены кольцеобразно внутри корпуса вала, в котором вкладыши направляющего подшипника определяют радиальный зазор направляющего подшипника между вкладышами направляющего подшипника и валом. Уплотнение вала может располагаться под и над вкладышами направляющего подшипника для удерживания гидродинамической текучей среды (как правило, масла или воды). Текучая среда заполняет пространство между валом, корпусом вала и уплотнениями вала, включая радиальный зазор направляющего подшипника. В идеальном случае вал вращается вплотную к пленке текучей среды, расположенной между вкладышами направляющего подшипника и вращающимся валом. Эта пленка текучей среды по существу находится под высоким давлением из-за относительного перемещения вала к вкладышам, чтобы сопротивляться перпендикулярным силам и силам, вызванным неисправностями, и поддерживать вал в центре.
[0035] Однако было определено, что ширина радиального зазора направляющего подшипника может значительно отличаться в зависимости от температуры окружающей среды системы подшипника. То есть «холодный» вал создает более широкий зазор, чем «горячий» вал, который термически расширился до рабочих температур. Радиальный зазор направляющего подшипника устанавливают один раз при вводе системы в эксплуатацию. Измерение и регулирование радиальных зазоров направляющего подшипника вручную могут оказаться трудоемкими и отнимающими массу времени и должны выполняться в то время, когда устройство находится в выключенном состоянии.
[0036] С целью компенсации зазоров поставщики оборудования оценивают тепловое расширение вала и размер вала при расширении до приемлемого «горячего» радиального зазора направляющего подшипника, когда турбина работает стабильно при нормальных рабочих условиях. Таким образом, поставщики, как правило, устанавливают холодный вал между отдельными вкладышами направляющего подшипника. В результате получается «холодный» радиальный зазор направляющего подшипника, поэтому зазор по существу более широкий и менее концентрический (из-за неоптимальных условий потока в пленке текучей среды), чем «горячий» радиальный зазор направляющего подшипника. После запуска вал постепенно нагревается и в конечном счете расширяется, пока температура вала не сравняется с рабочими температурами. Таким образом, термически расширенный вал образует более узкий, более концентрический «горячий» радиальный зазор направляющего подшипника.
[0037] В период запуска при большем радиальном зазоре давление пленки текучей среды недостаточно, чтобы сопротивляться боковым силам, которые вода, сбрасываемая с плотины, прилагает к турбине. Таким образом, переменные боковые силы раскачивают турбину и ротор вдоль вала, что часто приводит к потенциально опасным для системы вибрациям, износу или повреждению вследствие непосредственного контакта вала с вкладышами направляющего подшипника, а также к излишним аварийным сигналам или отключениям. Аварийное отключение деактивирует турбину, как только вибрации превысят запрограммированное пороговое значение, тогда как аварийные сигналы просто предупреждают об отклонении состоянии системы от нормы. Для приведения системы в рабочее состояние владельцы оборудования часто переопределяют аварийные сигналы и протоколы автоматического отключения.
[0038] Было определено, что по этой причине запуск турбины может быть опасным. Находящийся рядом обслуживающий персонал подвергается риску в плане безопасности, а турбогенераторный агрегат может быть поврежден. В экстремальной ситуации потерявший правильное местоположение вал может позволять узлу ротора входить в контакт с узлом статора и по существу разрушать полюса ротора, сердечник статора и обмотку статора. Вибрация также может ослаблять другие внутренние компоненты генератора или приводить к их отказу вследствие усталостного отказа. Когда операторы или установщики повышают пороговые значения аварийных сигналов и порог аварийных отключений для предотвращения отключений при запуске, операторы или установщики могут не обнаруживать существенные проблемы вовремя, чтобы отключить систему и избежать катастрофического отказа.
[0039] Следовательно, существует давняя и нерешенная потребность в разрешении проблем, связанных с колебаниями радиального зазора во время запуска. Более того, радиальный направляющий зазор иногда резко изменяется во время работы в ответ на нарушение рабочего состояния. Нарушение рабочего состояния может быть результатом гидравлических возмущений, неисправности в электросети, внезапного срабатывания тормозов турбины, столкновения ротора турбины с большим куском продуктов износа или какого-либо другого незапланированного случая при работе.
[0040] В соответствии со способами, конструкциями и компьютерными программными продуктами, описанными в настоящем документе, проблему вибраций вала во вращающихся машинах, имеющих гидродинамические подшипники, можно решить с помощью системы, выполненной с возможностью отслеживания радиального зазора между направляющими подшипниками и валом, вокруг которого расположены направляющие подшипники, и для регулировки местоположения одного или более вкладышей направляющих подшипников относительно вала при работе вращающейся машины. Преимущество примера системы может заключаться в непрерывном отслеживании и регулировании радиального зазора направляющего подшипника в ответ на термическое расширение вала, в результате чего сохраняется оптимальный радиальный зазор направляющего подшипника во время запуска и на протяжении всей работы вращающейся машины.
[0041] Дополнительным преимуществом некоторых вариантов осуществления системы, рассмотренной в настоящем описании, может быть защита от обратного хода, который в противном случае может возникать вследствие нарушения условий рабочего состояния радиального зазора направляющего подшипника. Обратный ход происходит, когда узел вала неожиданно входит в контакт с вкладышем направляющего подшипника. Контактное усилие может оказаться достаточным для перемещения вкладыша направляющего подшипника и любого линейного регулирующего болта назад (т.е. радиально наружу) от центра вращения вала. Усилие обратного хода приведет к тому, что механизмы статической регулировки, описанные в таких предыдущих патентных заявках и экспериментальных моделях, окажутся неработоспособными. Перемещенный вследствие обратного хода вкладыш направляющего подшипника создает большой неравномерный зазор между стороной вала для отодвинутого обратным ходом вкладыша и валом, что может быстро дестабилизировать узел вала и потребовать немедленного отключения системы.
[0042] Далее более подробно описаны способы и системы настоящего изобретения со ссылкой на Фиг. 1-9.
[0043] На Фиг. 1 представлена блок-схема, на которой показан способ регулировки местоположения вкладышей 210, 410, 510, 610, 710 направляющего подшипника для уменьшения влияния колебаний радиального зазора направляющего подшипника, в соответствии с одним из вариантов осуществления настоящего описания. На Фиг. 2-6 представлен пример систем 1000a, 1000b, 1000c, 1000d, 1000e регулировки направляющего подшипника, которые можно применять в комбинации со способом, описанным со ссылкой на Фиг. 1. На Фиг. 7 и 8 представлены некоторые варианты осуществления системы 1100 управления для применения с конструкциями и способами, показанными на Фиг. 1-6.
[0044] Структурная схема и блок-схемы на фигурах иллюстрируют архитектуру, функциональные возможности и работу возможных вариантов реализации систем, способов и компьютерных программных продуктов, в соответствии с различными вариантами осуществления настоящего изобретения. В этом отношении каждый блок на структурной схеме или блок-схемах может представлять собой модуль, сегмент или часть команд, которые содержат одну или более исполняемых команд для реализации указанной (-ых) логической (-их) функции (-й). В некоторых альтернативных вариантах реализации функции, отмеченные в блоках, можно осуществлять не в порядке, указанном на фигурах. Например, два блока, показанные последовательно, фактически могут быть выполнены по существу параллельно, или блоки иногда могут быть выполнены в обратном порядке в зависимости от задействованных функциональных возможностей. Следует также понимать, что каждый блок на иллюстрациях блок-схем и структурной схемы и комбинации блоков на иллюстрациях блок-схем и структурной схемы могут быть реализованы с помощью специальных аппаратных компьютерных систем, которые выполняют указанные функции или действия или реализуют комбинации специальных аппаратных средств и компьютерных команд.
[0045] Имея в виду блок 1 на Фиг. 1, в одном варианте осуществления способ поддержания радиального зазора между регулируемым направляющим подшипником 210, 410, 510, 610, 710 и валом 220, 420, 520, 620, 720 турбины может начинаться с измерения базового радиального зазора между по меньшей мере одним направляющим подшипником 210, 410, 510, 610, 710 и валом 220, 420, 520, 620, 720 турбины. Турбина может представлять собой гидроэлектрическую турбину. Однако способы, системы и конструкции настоящего описания не ограничиваются только этим примером. Способы, конструкции и системы, описанные в настоящем документе, применимы к любым турбинным системам, в которых используются направляющие подшипники.
[0046] В настоящем документе «радиальный зазор» представляет собой расстояние между крайним концом 211 вала по меньшей мере одного вкладыша подшипника и крайним периметром узла вала (вала 220). Радиальный зазор показан на Фиг. 2 позицией 215, в которой размер радиального зазора обозначен как D. Радиальный зазор обозначен позициями 415, 515, 615, 715 на Фиг. 3A-6. Радиальный зазор в системах, описанных в настоящем документе, можно измерять непрерывно и сравнивать с базовым радиальным зазором. В некоторых вариантах осуществления разница между базовым радиальным зазором и измеренным радиальным зазором дает дифференциал, с помощью которого регулируемый направляющий подшипник 210 можно регулировать для обеспечения оптимального зазора. Базовый радиальный зазор может учитывать режим работы турбины. Например, базовый зазор может быть разным при запуске турбины, когда турбина холодная, когда турбина горячая и при комбинации этих факторов. Базовый радиальный зазор также может учитывать различные эксплуатационные аспекты турбины, такие как часы, в которые турбина могла работать.
[0047] Как показано на Фиг. 7, базовый радиальный зазор 1102 может быть сохранен в запоминающем устройстве 1101 системы 1100 управления для поддержания радиального зазора между регулируемым направляющим подшипником и валом турбины. Система 1100 управления также может называться контроллером, который принимает сигнал о расстоянии от датчика, измеряющего радиальный зазор, и передает сигнал регулятору 245, 445, 645, 745 вкладыша на перемещение по меньшей мере одного подшипника, например, регулируемого направляющего подшипника 210, 410, 510, 610, 710, для компенсации отклонений радиального зазора. В одном варианте осуществления система 1110 управления может включать в себя по меньшей мере один модуль запоминающего устройства 1102 для сохранения значений базового радиального зазора для расстояния между по меньшей мере одним направляющим подшипником и валом турбины.
[0048] Значения базового радиального зазора могут быть введены в систему 1100 управления оператором, который взаимодействует с системой 1110 управления через адаптер 150 пользовательского интерфейса, как показано на Фиг. 8. В этом примере оператор турбины может вводить значения для базового радиального зазора с по меньшей мере одного устройства 152, 153, 156 ввода. По меньшей мере одно устройство 152, 154, 156 ввода может представлять собой любое вычислительное устройство, такое как настольный компьютер, мобильный компьютер, переносной компьютер, планшет, смартфон и/или специализированный компьютер турбины.
[0049] Устройства 152, 154, 156 ввода могут находиться в соединении с адаптером 150 пользовательского интерфейса посредством беспроводного соединения, либо устройства 152, 154, 156 ввода могут находиться в электрическом соединении с адаптером 150 пользовательского интерфейса посредством проводной связи.
[0050] Базовый радиальный зазор может представлять собой значение, которое вручную измеряют на турбинах во время запуска или когда устройство отключено, и также может учитывать измерения во время работы турбины.
[0051] В некоторых других вариантах осуществления система 1100 управления может использовать машинное обучение для регулировки базового радиального зазора с учетом по меньшей мере одного из предыдущих измерений радиального зазора, измерений радиального зазора в реальном времени и предлагаемых производителем значений радиального зазора. Алгоритмы машинного обучения создают математическую модель на основе выборочных данных, известных как «обучающие данные», чтобы формировать прогнозы или решения, не будучи явно запрограммированными на выполнение задачи. В этом случае предыдущие измерения можно использовать в условиях эксплуатации для обеспечения алгоритмов обучающих данных, а алгоритмы, в свою очередь, можно применять для использования данных в реальном времени с целью обновления базового радиального зазора.
[0052] Как показано на Фиг. 1, способ может продолжаться в блоке 2 при зацеплении системы регулировки вкладыша с по меньшей мере одним направляющим подшипником 210. Вкладыши 210 направляющего подшипника предпочтительно выполнены из масло- или водостойкого материала в дополнение к выполнению из материала, который обладает низким коэффициентом трения. В одном варианте осуществления по меньшей мере один направляющий подшипник 210 может включать в себя вкладыш подшипника из стали с футеровкой белым металлом. Футеровка белым металлом может представлять собой баббит на основе олова. Баббит на основе олова представляет собой материал, который содержит более 80% сплава олова. Материал также может содержать меньшие количества сурьмы, свинца и меди.
[0053] Некоторые варианты осуществления систем регулировки вкладыша показаны на Фиг. 2-6. В каждом из описанных ниже вариантов осуществления система регулировки вкладыша может включать в себя основной привод 230, соединенный посредством передаточного механизма с регулятором 245, 445, 645 вкладыша, который соединен с по меньшей мере одним направляющим подшипником 210, 410, 510, 610, 710. Регулятор 245, 445, 645, 745 вкладыша может быть приведен в действие движущим усилием от основного привода 230, который перемещает по меньшей мере один направляющий подшипник 210, 410, 510, 610, 710 в направлении регулировки радиального зазора. Например, основной привод 230 может представлять собой двигатель, такой как двунаправленный двигатель, который позволяет двигателю вращаться в любом направлении, т.е. в двух противоположных направлениях, при этом контролируя скорость. В одном примере, когда двигатель основного привода 230 вращается в первом направлении, система регулировки вкладыша может перемещать по меньшей мере один направляющий подшипник 210, 410, 510, 610, 710 для увеличения радиального зазора, а когда двигатель основного привода 230 вращается во втором направлении (т.е. противоположном первому направлению), система регулировки вкладыша может перемещать по меньшей мере один направляющий подшипник 210, 410, 510, 610, 710 для уменьшения радиального зазора.
[0054] На Фиг. 2 представлен вид в перспективе примера системы 1000a регулировки направляющего подшипника со снятой для ясности крышкой редуктора. Пример системы 1000a регулировки направляющего подшипника может быть расположен на опорной конструкции 202 подшипника, содержащей множество ребер 203, входящих в зацепление с опорным кольцом 207. Опорное кольцо 207 иногда называют кронштейном. Как правило, крепежные элементы присоединяют неподвижные вкладыши направляющего подшипника к опорному кольцу 207.
[0055] В варианте осуществления, показанном на Фиг. 2, регулятор 245 вкладыша, представляющий собой регулировочный болт, проходит через опорное кольцо 207 для зацепления с вкладышем 210 направляющего подшипника. Однако предполагается, что регулятор 245 вкладыша не обязательно должен проходить через опорное кольцо 207 во всех вариантах осуществления. Как ребра 203, так и опорное кольцо 207 могут быть расположены на платформе 201.
[0056] Основной привод 230 входит в зацепление с системой 241 зубчатой передачи, представленной редуктором 242, неколлинеарно по отношению к длине L регулятора 245 вкладыша. Более конкретно двигатель основного привода 230 присоединен к приводному валу 236, имеющему одну или более шестерен 238 приводного вала, расположенных вокруг приводного вала 236. Шестерни 238 приводного вала входят в зацепление с активной шестерней 246 системы 241 зубчатой передачи, которая представлена редуктором, обозначенным позицией 242. В этом примере передаточный механизм системы регулировки вкладыша включает в себя по меньшей мере одно из приводного вала 236, шестерен 238 приводного вала и активной шестерни 246 (которая может представлять собой червячную шестерню 240) системы 241 зубчатой передачи.
[0057] В показанном варианте осуществления длина L регулятора вкладыша соответствует реальному или потенциальному линейному перемещению регулятора 245 вкладыша. В некоторых вариантах осуществления путем конфигурирования основного привода 230 для зацепления с системой 241 зубчатой передачи неколлинеарно по отношению к реальному или потенциальному линейному перемещению регулятора 245 вкладыша пример системы 200 регулировки направляющего подшипника защищает от неожиданного обратного хода, который в противном случае мог бы повредить систему регулировки подшипника, привести к потере ориентации вала или сократить промежуток между вращающимися и неподвижными компонентами. Без привязки к какой-либо теории считается, что неколлинеарное зацепление может обеспечивать достаточное противоусилие для преодоления сил обратного хода.
[0058] Узел 234 основного привода входит в зацепление с системой 241 зубчатой передачи, представленной редуктором 242, неколлинеарно по отношению к длине L регулятора 245 вкладыша. Узел 234 основного привода может содержать основной привод 230, приводной вал 236, находящийся в зацеплении с основным приводом 230, и одну или более шестерней 238 приводного вала, расположенных вокруг приводного вала 236. На Фиг. 2 шестерня 238 приводного вала представляет собой червячный винт 235. Шестерня 238 приводного вала входит в зацепление с активной шестерней 246 вдоль второй плоскости 223, расположенной по касательной к окружности шестерни 238 приводного вала.
[0059] В показанном варианте осуществления длина L регулятора 245 вкладыша соответствует реальному или потенциальному линейному перемещению регулятора 245 вкладыша. Длина L регулятора 245 вкладыша дополнительно отделяет первый конец 243 регулятора 245 вкладыша от конца вкладыша 247 регулятора 245 вкладыша. Как показано на Фиг. 2, первый конец 243 регулятора 245 вкладыша представляет собой конец регулятора 245 вкладыша, который наиболее удален от направляющего подшипника 210, а конец вкладыша 245 регулятора 245 вкладыша представляет собой ближайший конец регулятора 245 вкладыша к обратной стороне 212 вкладыша 210 направляющего подшипника.
[0060] Длина L регулятора 245 вкладыша дополнительно образует первую плоскость 227. Регулятор 245 вкладыша имеет резьбу, которая обеспечивает вращение регулятора 245 вкладыша по длине L (с центром C вращения). На Фиг. 2 длина L регулятора 245 вкладыша проходит в горизонтальном направлении. Первая плоскость 227 представляет собой горизонтальную плоскость, показанную на Фиг. 2. Вторая плоскость 223 не коллинеарна первой плоскости 227. На Фиг. 2 вторая плоскость представляет собой вертикальную плоскость, которая пересекает первую плоскость 223 перпендикулярно. Было обнаружено, что путем конфигурирования узла 234 основного привода для зацепления с системой 241 зубчатой передачи посредством шестерни 238 приводного вала, расположенной во второй плоскости 227, причем вторая плоскость 227 не коллинеарна первой плоскости 223, пример системы 200 регулировки направляющего подшипника, таким образом, выполнен с возможностью защиты от неожиданного обратного хода, который в противном случае мог бы повредить систему регулировки подшипника. Например, регулятор 245 вкладыша может вращаться вокруг горизонтальной оси, параллельной длине регулятора 245 вкладыша, в то время как шестерня 236 приводного вала, находящаяся в зацеплении с основным приводом 230, поворачивается вокруг вертикальной оси, при этом шестерни 238 приводного вала входят в зацепление с активной шестерней 246.
[0061] В одном примере изображенного на Фиг. 2 варианта осуществления основной привод 230 входит в зацепление с червячным винтом 235 (который образует собой шестерни 238 приводного вала). Червячный винт 235 по касательной входит в зацепление с червячным колесом 240 (которое образует собой активную шестерню 246) в редукторе 242. Червячное колесо 240 расположено вокруг регулятора 245 вкладыша. Когда основной привод 230 приводят в действие, основной привод 230 вращает червячный винт 235. Червячный винт 235, в свою очередь, вращает червячное колесо 240 вокруг центра C вращения червячного колеса. Червячное колесо 240, в свою очередь, входит в зацепление с витками резьбы 244 на регуляторе 245 вкладыша, тем самым превращая круговое движение червячного колеса в линейное движение. Регулятор 245 вкладыша может входить в зацепление непосредственно с обратной стороной 212 вкладыша 210 направляющего подшипника. Однако в других примерах осуществления один или более элементов могут быть расположены между концом вкладыша 247 регулятора 245 вкладыша и обратной стороной 212 вкладыша 210 направляющего подшипника. Например, в показанном варианте осуществления разделитель 253 закрывает конец вкладыша 247, а крепежные элементы 248 прикрепляют разделитель 253 к обратной стороне 212 вкладыша 210 направляющего подшипника. Разделитель 253 может представлять собой промежуточную пластину с крепежными элементами или другое устройство, выполненное с возможностью прикрепления регулятора 245 вкладыша к вкладышу 210 направляющего подшипника. В других вариантах осуществления разделитель 253 может быть встроен во вкладыш 210 направляющего подшипника.
[0062] На Фиг. 2 вкладыш 210 направляющего подшипника вместе с разделителем 253 и крепежными элементами 248 составляют узел 213 вкладыша подшипника. В других примерах осуществления узел 213 вкладыша подшипника может содержать вкладыш 210 подшипника и конструкцию, выполненную с возможностью прикрепления регулятора 245 вкладыша к вкладышу 210 направляющего подшипника.
[0063] Кроме того, в показанном варианте осуществления регулятор 245 вкладыша представляет собой регулировочный болт, но следует понимать, что другие устройства, выполненные с возможностью регулировки местоположения вкладыша 210 направляющего подшипника вдоль радиальной плоскости, определяемой центром C вращения вала 220, считаются входящими в объем настоящего описания. Аналогичным образом, следует понимать, что основной привод 230 может содержать двигатель, гидравлический привод, электрический шаговый механизм или другое устройство, выполненное с возможностью приведения в действие системы 241 зубчатой передачи. Кроме того, функция передачи энергии системы зубчатой передачи может быть обеспечена вместо этого посредством комбинации решений для передачи энергии, которые включают в себя, без ограничений, шестерни, зубчатые рейки, ведущие шестерни, ремни, шкивы и цепи. Функцию защиты от обратного хода можно заменять специальной муфтой, такой как муфта, описанная в публикации патента США № 2013/0206530, содержание которой полностью включено в настоящий документ путем ссылки, или блокирующим механизмом, который приводится в действие, когда основной привод 230 не работает, или основным приводом 230, выполненным с возможностью обеспечения постоянного магнитного сопротивления усилиям направляющего подшипника.
[0064] На Фиг. 3A-6 представлены альтернативные примеры осуществления систем 1000b, 1000c, 1000d, 1000e регулировки направляющего подшипника, включая системы регулировки вкладыша. В по меньшей мере одном примере варианта осуществления, показанного на Фиг. 2, каждый вкладыш 210 направляющего подшипника включает в себя собственную систему регулировки вкладыша, которая может включать в себя регулятор 245 вкладыша, приводимый в действие индивидуальным узлом 230 основного привода, в котором индивидуальный передаточный механизм соединяет индивидуальный узел 230 основного привода с регулятором 245 вкладыша. В варианте осуществления, показанном на Фиг. 2, передаточный механизм может включать в себя по меньшей мере одно из приводного вала 236, шестерней 238 приводного вала и активной шестерни 246 (которая может представлять собой червячную шестерню 240) системы 241 зубчатой передачи. В вариантах осуществления, показанных на Фиг. 3A-6, узел основного привода не входит в зацепление с каждым регулятором 445, 645, 745 вкладыша для каждого вкладыша 210 направляющего подшипника по отдельности. В вариантах осуществления, показанных на Фиг. 3A-6, представлен передаточный механизм, который включает в себя тяговый элемент 483, 583, 683, 783, который может соединять единственный узел основного привода с более чем одним регулятором 445, 645, 745 вкладыша. В этих примерах тяговый элемент 483, 583, 683 может обеспечивать меньшее количество узлов с основными приводами для приведения в действие множества вкладышей 210, 410, 510, 610, 710 регулируемого направляющего подшипника. В определенных примерах осуществления один узел основного привода может быть выполнен с возможностью перемещения всех направляющих подшипников 210 через тяговый элемент 483, 583, 683, 783 и систему 441, 474, 541, 641, 649, 741 зубчатой передачи, которая передает механическое усилие от тягового элемента 483, 583, 683, 783 к регулятору 445, 645, 745 вкладыша.
[0065] На Фиг. 3A и 3B показан вариант осуществления с цепным приводом системы для регулировок 1000b направляющего подшипника, в котором тяговый элемент 483 содержит цепь 473, выполненную с возможностью передачи движущего усилия от основного привода к системе 441 зубчатой передачи. Цепь 473 входит в механическое зацепление с основным приводом. Цепь 473 также входит в механическое зацепление со множеством звездочных шестерней 474, при этом цепь 473 и множество звездочных шестерней 473 обеспечивают зубчатую систему 441. Система 1000b регулировки вкладыша подшипника может регулировать вкладыши 410 регулируемого направляющего подшипника для регулировки радиального зазора. Комбинация зубчатой системы 441 и цепи 473, которые образуют собой тяговый элемент 483, обеспечивает передаточный механизм, который соединяет основной привод и регулятор 445 вкладыша для перемещения вкладыша 410 направляющего подшипника с целью регулировки радиального зазора. Следует отметить, что вкладыш направляющего подшипника, обозначенный позицией 410 на Фиг. 3A, подобен вкладышу направляющего подшипника, обозначенному позицией 210 на Фиг. 2. Таким образом, описание вкладыша подшипника, обозначенного позицией 210, подходит для описания вкладыша подшипника, обозначенного позицией 410. Радиальный зазор находится между наружным периметром 471 вала 420 и крайней поверхностью 416 вкладыша 410 подшипника.
[0066] В изображенном примере осуществления система 441 зубчатой передачи включает в себя звездочную шестерню 474, имеющую зубья для зацепления с цепью 473, а также винтовую нарезку на червячном колесе 440, входящем в зацепление с регулятором 445 вкладыша. Каждая звездочная шестерня 474 входит в зацепление с червячным колесом 440. Звездочная шестерня 474 передает движущее усилие червячному колесу 440. Червячное колесо 440 входит в зацепление с витками резьбы 444 на регуляторе 445 вкладыша, чтобы превратить вращательное перемещение червячного колеса 440 в линейное перемещение регулятора 445 вкладыша. Регулятор 445 вкладыша содержит первый конец 443, расположенный в дистальном направлении от конца вкладыша 447. Конец вкладыша 447 находится в зацеплении с вкладышем 410 направляющего подшипника. Как показано на Фиг. 3A и 3B, первый конец 443 регулятора 445 вкладыша представляет собой конец регулятора 445 вкладыша, который наиболее удален от направляющего подшипника 410, а конец вкладыша 445 регулятора 445 вкладыша представляет собой ближайший конец регулятора 445 вкладыша к обратной стороне 412 вкладыша 410 направляющего подшипника.
[0067] На Фиг. 4 показан пример системы 1000c регулировки вкладыша подшипника, в которой тяговый элемент 583 включает в себя круговую зубчатую рейку 567, которая находится в винтовом зацеплении с шестернями 540. Система 1000c регулировки вкладыша подшипника может регулировать вкладыши 510 регулируемого направляющего подшипника для регулировки радиального зазора. Круговая зубчатая рейка 567 и шестерни 540 могут обеспечивать передаточный механизм, который передает движущее усилие от основного привода к регулятору вкладыша, при этом регулятор вкладыша прикладывает движущее усилие к обратной поверхности 512 вкладышей 510 направляющего подшипника. Шестерни 540 могут находиться в винтовом зацеплении с регулятором вкладыша (не показан). Следует отметить, что вкладыш направляющего подшипника, обозначенный позицией 510 на Фиг. 4, подобен вкладышу направляющего подшипника, обозначенному позицией 210 на Фиг. 2. Таким образом, описание вкладыша подшипника, обозначенного позицией 210, подходит для описания вкладыша подшипника, обозначенного позицией 510. Радиальный зазор находится между наружным периметром 571 вала 520 и крайней поверхностью 516 вкладыша 510 подшипника.
[0068] Основной привод, например, двигатель, входит в зацепление с круговой зубчатой рейкой 567. Круговая зубчатая рейка 567, в свою очередь, входит в зацепление со множеством шестерен 540, расположенных кольцеобразно вокруг узла 570 вала, причем каждая шестерня 540 входит в зацепление с регулятором подшипника, выполненным с возможностью зацепления с узлом 513 вкладыша направляющего подшипника. Узел 570 вала может представлять собой вал гидроэлектрической турбины. Узел 513 вкладыша направляющего подшипника аналогичен узлу 213 вкладыша направляющего подшипника, показанному на Фиг. 2. Узел 513 вкладыша направляющего подшипника может включать в себя разделитель 553 и крепежные элементы к вкладышу 510 направляющего подшипника.
[0069] В некоторых вариантах осуществления основной привод вращает круговую зубчатую рейку 567, а круговая зубчатая рейка 567 передает движущее усилие на шестерню 540 и затем на регулятор подшипника (регулятор вкладыша). Регулятор подшипника входит в зацепление с узлом 513 направляющего подшипника и таким образом регулирует местоположение вкладышей 510 направляющего подшипника равномерно вдоль радиальных линий, проходящих от центра C вращения вала. Уплотнение 519 может быть расположено смежно с вкладышами направляющего подшипника для предотвращения утечки смазывающего вещества, такого как вода или масло, через зазор 515.
[0070] На Фиг. 5 показан пример системы 1000d регулировки подшипника, в которой тяговый элемент 683 включает в себя рычажный механизм 678. Система 1000d регулировки вкладыша подшипника может регулировать вкладыши 610 регулируемого направляющего подшипника для регулировки радиального зазора. Рычажный механизм 678 может включать в себя плечо 679 рычага, находящееся в контакте с системой 641 зубчатой передачи, которая включает в себя червячное колесо 649 и шестерню 640, соответствующее каждому из вкладышей 610 регулируемого направляющего подшипника. Плечо 679 рычажного механизма 678 находится в непосредственном соединении с червячным колесом 649. Червячное колесо 649 может находиться в винтовом зацеплении с шестерней 640. Шестерня 640 находится в зацеплении с регулятором 645 вкладыша. Система 1000d регулировки вкладыша подшипника может регулировать вкладыши 610 регулируемого направляющего подшипника для регулировки радиального зазора. Рычажный механизм 678 может дополнительно включать в себя рычажные тяги 677. Рычажные тяги 677 соединяют каждое из плеч 679. Рычажные тяги 677 и плечи 679 рычажного механизма 678 в соединении с червячным колесом 649 и шестерней 640 могут обеспечивать передаточный механизм, который передает создаваемую основным приводом тягу к регулятору 645 вкладыша, при этом регулятор 645 вкладыша соединен с вкладышами 610 регулируемого направляющего подшипника. Шестерни 640 могут находиться в винтовом зацеплении с регулятором вкладыша (не показан). Следует отметить, что вкладыш направляющего подшипника, обозначенный позицией 610 на Фиг. 5, подобен вкладышу направляющего подшипника, обозначенному позицией 210 на Фиг. 2. Таким образом, описание вкладыша подшипника, обозначенного позицией 210, подходит для описания вкладыша подшипника, обозначенного позицией 610. Радиальный зазор находится между наружным периметром 671 вала 620 и крайней поверхностью 616 вкладыша 610 подшипника.
[0071] Основной привод, например, двигатель, входит в зацепление с рычажным механизмом 678. Рычажный механизм 678, в свою очередь, входит в зацепление со множеством шестерен 640, расположенных кольцеобразно вокруг узла 670 вала, причем каждая шестерня 640 входит в зацепление с регулятором подшипника, выполненным с возможностью зацепления с узлом 613 вкладыша направляющего подшипника. Узел 670 вала может представлять собой вал гидроэлектрической турбины. Узел 613 вкладыша направляющего подшипника аналогичен узлу 213 вкладыша направляющего подшипника, показанному на Фиг. 2. Узел 613 вкладыша направляющего подшипника может включать в себя разделитель 653 и крепежные элементы к вкладышу 610 направляющего подшипника.
[0072] В некоторых вариантах осуществления основной привод вращает рычажный механизм 678, а рычажный механизм 678 передает движущее усилие на шестерню 640 и затем на регулятор подшипника (регулятор 645 вкладыша). Регулятор 645 подшипника, входящий в зацепление с узлом 613 направляющего подшипника, таким образом регулирует местоположение вкладышей 610 направляющего подшипника равномерно вдоль радиальных линий, проходящих от центра C вращения вала. Уплотнение 619 может быть расположено смежно с вкладышами направляющего подшипника для предотвращения утечки смазывающего вещества, такого как вода или масло, через зазор 615.
[0073] В некоторых вариантах осуществления основной привод входит в зацепление с рычажным механизмом 678. В других примерах осуществления рычажный механизм 678 может быть выполнен с возможностью отсоединения от червячного колеса 649, когда регулировка не требуется.
[0074] На Фиг. 6 показан другой пример системы 1000e регулировки подшипника, в которой тяговый элемент 783 включает в себя клиновую систему 789, которая для противодействия обратному ходу на одном или нескольких вкладышах 710 использует трение по всей окружности обратной стороны 712 вкладышей 710 подшипника. В варианте осуществления, показанном на Фиг. 6, передаточный механизм системы регулировки вкладыша представляет собой клиновую систему 789. Система 1000e регулировки вкладыша подшипника может регулировать вкладыши 710 регулируемого направляющего подшипника для регулировки радиального зазора. Следует отметить, что вкладыш направляющего подшипника, обозначенный позицией 710 на Фиг. 6, подобен вкладышу направляющего подшипника, обозначенному позицией 210 на Фиг. 2. Таким образом, описание вкладыша подшипника, обозначенного позицией 210, подходит для описания вкладыша подшипника, обозначенного позицией 710. Вкладыш 710 подшипника представляет собой компонент узла 713 вкладыша направляющего подшипника. Узел 713 вкладыша направляющего подшипника аналогичен узлу 213 вкладыша направляющего подшипника, показанному на Фиг. 2. Узел 713 вкладыша направляющего подшипника может включать в себя разделитель 753 и крепежные элементы к вкладышу 610 направляющего подшипника. Радиальный зазор находится между наружным периметром 771 вала 720 и крайней поверхностью 716 вкладыша 710 подшипника.
[0075] Основной привод, например, двигатель, входит в зацепление с рычажным механизмом 778. Рычажный механизм 778, в свою очередь, входит в зацепление с обратной поверхностью 712 вкладышей 710 подшипника, расположенных кольцеобразно вокруг узла 770 вала. Более конкретно суженный участок клиновой системы 789 вставлен между разделителем 753, который соединен с обратной поверхностью 712 вкладышей 710 подшипника, и концом вкладыша 247 регулятора 245 вкладыша. Чем больший размер сужающегося участка клиновой системы 789 скользит между концом вкладыша 747 регулятора 745 вкладыша и разделителем 753, который соединен с обратной поверхностью 712 вкладышей 710 подшипника, тем больше расстояние, на которое вкладыши 710 перемещаются к наружному периметру 716 вала 720. Основной привод вращает рычажный механизм 778, а рычажный механизм 778 передает движущее усилие на вкладыши 710 подшипника. Следует отметить, что клиновая система 789 может одновременно приводить в действие множество вкладышей 710 подшипника. Клиновая система 789, расположенная между регулятором 745 подшипника и разделителем 753, соединенным с обратной поверхностью 712 вкладышей 710 подшипника узла 613 направляющего подшипника, таким образом регулирует местоположение вкладышей 710 направляющего подшипника равномерно вдоль радиальных линий, проходящих от центра C вращения вала.
[0076] Уплотнение 719 может быть расположено смежно с вкладышами направляющего подшипника для предотвращения утечки смазывающего вещества, такого как вода или масло, через зазор 715.
[0077] Как показано на Фиг. 1, способ в блоке 3 может дополнительно включать измерение отклонений радиального зазора между по меньшей мере одним направляющим подшипником 210, 410, 510, 610, 710 и валом 220, 420, 520, 620, 720 турбины. Отклонения радиального зазора можно измерять в любое время относительно работы и простоя турбины. Например, «холодные» измерения можно выполнять, когда турбина не работает, а при работе турбины можно выполнять «горячие» измерения.
[0078] В некоторых вариантах осуществления датчик приближения может выполнять измерения радиального зазора. Эти измерения можно использовать для определения отклонения, т.е. отличия радиального зазора от базового радиального зазора, заданного в блоке 1 способа, показанного на Фиг. 1. Термин «датчик приближения» может быть использован для обозначения датчиков, выполненных по разным технологиям, имеющим незначительно отличающиеся названия, но все они представляют собой датчики, выдающие сигнал (цифровой, аналоговый или механический), который предназначен для указания расстояния или приближения. Один вариант осуществления датчика приближения, который подходит для способов, конструкций и систем настоящего описания, обозначен на Фиг. 2 позицией 205. В некоторых вариантах осуществления на стороне 216 вкладыша направляющего подшипника конец датчика 205 приближения расположен внутри системы регулировки направляющего подшипника, как показано на Фиг. 2. Считается, что любые подобные замены находятся в пределах объема настоящего описания. В других примерах осуществления датчик приближения может отсутствовать в пользу сигналов обратной связи о точном положении, генерируемых непосредственно основным приводом 230.
[0079] В качестве примера датчик 205 приближения может быть расположен внутри вкладыша 210 направляющего подшипника и может иметь конец датчика, обращенный к узлу 270 вала. Однако в других примерах осуществления датчик 205 приближения может быть расположен на вкладыше 210 направляющего подшипника либо над, под или рядом с вкладышем 210 направляющего подшипника. Датчик 205 приближения выполнен с возможностью измерения расстояния D радиального зазора 215 между крайней поверхностью 216 узла 213 вкладыша подшипника и крайним периметром 271 узла 270 вала. Радиальный зазор 215, как правило, представляет собой пространство между стороной 211 вала для вкладыша направляющего подшипника и валом 220. Этот радиальный зазор 215 выполнен с возможностью заполнения смазывающим веществом 217, таким как вода или масло. Таким образом, на Фиг. 2 крайняя поверхность 216 узла 213 вкладыша подшипника представляет собой сторону 211 вала направляющего подшипника 210, а крайний периметр 271 узла 270 вала представляет собой периметр вала 220.
[0080] Соответственно, радиальный зазор 215 представляет собой расстояние D между стороной вала 211 и валом 220. Однако в других примерах осуществления узел 270 вала может дополнительно содержать одну или более гильз, размещенных по окружности вала 220. Когда гильза или другой объект расположены между стороной 211 вала направляющего подшипника 210 и валом 220, радиальный зазор будет пониматься как расстояние D между крайней поверхностью 216 узла 213 вкладыша подшипника и крайним периметром 271 узла 270 вала.
[0081] Следует отметить, что описание датчика приближения, обозначенного позицией 205 для системы 1000a регулировки подшипника, представленной на Фиг. 2, в равной степени применимо для предоставления описания датчика приближения, который можно использовать для систем 1000b, 1000c, 1000d, 1000e регулировки подшипника, показанных на Фиг. 3A-6. В каждом из вариантов осуществления, изображенных на Фиг. 3A-6, датчик приближения может быть встроен в узел 413, 513, 613, 713 вкладыша направляющего подшипника аналогично тому, как датчик приближения встроен в узел 213 вкладыша направляющего подшипника, который изображен на Фиг. 2. Более конкретно датчик приближения может быть расположен на вкладыше 410, 510, 610, 710 направляющего подшипника либо над, под или рядом с вкладышем 410, 510, 610, 710 направляющего подшипника. Датчик приближения выполнен с возможностью измерения расстояния радиального зазора 415, 515, 616, 715 между крайней поверхностью 416, 516, 616, 716 узла 413, 513, 613, 713 вкладыша направляющего подшипника и крайним периметром 471, 571, 671, 771 узла 470, 570, 670, 770 вала.
[0082] В некоторых вариантах осуществления датчик 205 приближения представляет собой индуктивный вихретоковый датчик. Индуктивные датчики «вихревого тока» выполнены с возможностью вывода аналогового напряжения, которое пропорционально расстоянию между поверхностью датчика и электропроводящей «мишенью», например, крайним периметром 271 узла 270 вала. Во время работы привод возбуждает проволочную обмотку в зонде с помощью РЧ-сигнала. В одном примере частота РЧ-сигнала составляет приблизительно 1 МГц. Обмотка зонда генерирует осциллирующее электромагнитное поле. Любой электропроводящий материал, взаимодействующий с полем, будет иметь «вихревой ток», индуцированный на его поверхности. Вихревой ток создает свое собственное электромагнитное поле. Взаимодействие между полем обмотки и полем вихревого тока приводит к изменению импеданса обмотки, величина которого определяется расстоянием между двумя полями или между зондом и целевой поверхностью. Привод отслеживает импеданс обмотки и выдает линейное аналоговое напряжение, пропорциональное расстоянию между зондом и целевой поверхностью.
[0083] Как показано на Фиг. 1, способ может продолжаться в блоке 4, который дополнительно вычисляет разность между отклонениями радиального зазора и базовым радиальным зазором. В некоторых вариантах осуществления расчет разности между отклонениями радиального зазора и базовым радиальным зазором обеспечен системой 1100 управления, которая может включать в себя анализатор 1104 корректирующего радиального зазора. На Фиг. 7 и 8 показан один вариант осуществления системы 1100 управления для регулировки местоположения вкладышей 210, 410, 510, 610, 710 направляющего подшипника для уменьшения влияния колебаний радиального зазора направляющего подшипника. Система 1100 управления также может называться контроллером.
[0084] Система 1100 управления находится в соединении с системами регулировки вкладыша, которые были описаны выше со ссылкой на Фиг. 2-6. Например, системы 1110 управления могут находиться в соединении либо посредством беспроводной связи, либо посредством проводной связи с основным приводом, таким как основной привод, обозначенный позицией 230 на Фиг. 2. Например, система 1100 управления может включать в себя по меньшей мере один генератор 1106 сигналов в соединении с системой регулировки вкладыша, которая перемещает этот по меньшей мере один направляющий подшипник 210, 410, 510, 610, 710 в направлении регулировки радиального зазора. В одном варианте осуществления по меньшей мере один генератор 1106 сигналов находится в соединении с основным приводом 230.
[0085] В некоторых вариантах осуществления система 1100 управления может включать в себя приемник 1103 для приема измеренных отклонений радиального зазора между по меньшей мере одним направляющим подшипником 210, 410, 510, 610, 710 и валом 270 турбины.
[0086] В некоторых вариантах осуществления система 1100 управления может дополнительно включать в себя анализатор 1104 корректирующего радиального зазора, который использует аппаратный процессор 1105 для выполнения набора команд с целью сравнения измеренных отклонений радиального зазора со значениями базового радиального зазора для обеспечения размера корректирующего радиального зазора. В настоящем документе термин «подсистема аппаратного процессора» или «аппаратный процессор» может относиться к процессору, запоминающему устройству, программному обеспечению или их комбинациям, которые взаимодействуют для выполнения одной или более конкретных задач. В используемых вариантах осуществления подсистема аппаратного процессора может включать в себя один или более элементов обработки данных (например, логические схемы, схемы обработки, устройства выполнения команд и т.п.). Один или более элементов обработки данных могут быть включены в центральный процессор, блок обработки графических изображений и/или в отдельный контроллер на основе процессора или вычислительного элемента (например, логические вентили и т.п.). Подсистема аппаратного процессора может включать в себя одно или более встроенных запоминающих устройств (например, кэши, специализированные запоминающие устройства, постоянное запоминающее устройство и т.д.). В некоторых вариантах осуществления подсистема аппаратного процессора может включать в себя одно или более запоминающих устройств, которые могут находиться на плате или вне платы или которые могут быть выделены для использования подсистемой аппаратного процессора (например, ПЗУ, ОЗУ, базовая система ввода/вывода (BIOS) и т.д.).
[0087] Более конкретно, система 1110 управления принимает данные измерений радиального зазора от датчика 205 приближения, который может измерять радиальный зазор, когда турбина горячая или холодная, и/или когда турбина остановлена или работает и т.п. Затем система 1110 управления использует анализатор 1104 корректирующего радиального зазора для сравнения данных измерений радиального зазора от датчика 205 приближения с базовым радиальным зазором, который был ранее определен на стадии 1 способа, показанного на Фиг. 1. Значения базового радиального зазора могут быть сохранены в запоминающем устройстве 1101 системы 1100 управления, которая может быть обеспечена в модуле для базового радиального зазора 1102. В некоторых вариантах осуществления анализатор 1104 корректирующего радиального зазора определяет, представляет ли собой разность между базовым радиальным зазором и измеренным радиальным зазором достаточно значительное отклонение, чтобы представлять собой отклонение радиального зазора, запускающее работу системы регулируемого направляющего подшипника вследствие регулировки радиального зазора, которое инициирует система регулировки вкладыша. Для определения допустимости коррекции корректирующий радиальный анализатор может применять ряд правил, которые приводятся в действие аппаратным процессором 1105 при вычислении решения по отклонениям радиального зазора.
[0088] Каждый из компонентов системы 1110 управления, показанных на Фиг. 7 можно взаимно соединять посредством системной шины 102.
[0089] Любая из систем или машин (например, устройств), показанных на Фиг. 7 может представлять собой, включать в себя или иным образом быть реализована на специализированном (например, специальном или иным образом не универсальном) компьютере, который модифицирован (например, сконфигурирован или запрограммирован программным обеспечением, таким как один или более программных модулей приложения, операционной системы, микропрограммного обеспечения, промежуточного программного обеспечения или другой программы) для выполнения одной или более функций, описанных в настоящем документе для этой системы или устройства. Например, специализированная компьютерная система, выполненная с возможностью реализации любой одной или более методологий, описанных в настоящем документе, описана выше со ссылкой на Фиг. 1-6, и такой специализированный компьютер может, соответственно, представлять собой средство для выполнения любой одной или более методологий, описанных в настоящем документе. В технической области таких специализированных компьютеров специализированный компьютер, который модифицирован конструкциями, описанными в настоящем документе, для осуществления функций, описанных в настоящем документе, технически улучшен по сравнению с другими специализированными компьютерами, которые не имеют конструкций, описанных в настоящем документе, или иным образом не могут выполнять функции, описанные в настоящем документе. Соответственно, специальное устройство, выполненное в соответствии с системами и способами, описанными в настоящем документе, обеспечивает усовершенствование технологии аналогичных специальных устройств.
[0090] Система 1100 управления может быть интегрирована в систему 1200 обработки, показанную на Фиг. 8. Система 1200 обработки включает в себя по меньшей мере один процессор (ЦП) 104, функционально соединенный с другими компонентами посредством системной шины 102. Кэш 106, постоянное запоминающее устройство (ПЗУ) 108, оперативное запоминающее устройство (ОЗУ) 110, адаптер 120 ввода/вывода (I/O), звуковой адаптер 130, сетевой адаптер 140, адаптер 150 пользовательского интерфейса и адаптер 160 устройства отображения функционально соединены с системной шиной 102. Шина 102 взаимно соединяет множество компонентов, как будет описано в настоящем документе.
[0091] Система 1200 обработки, показанная на Фиг. 8, может дополнительно включать в себя первое устройство 122 хранения и второе устройство 124 хранения, функционально соединенные с системной шиной 102 с помощью адаптера 120 ввода/вывода. Устройства 122 и 124 хранения могут представлять собой любые дисковые устройства хранения (например, магнитное или оптическое дисковое устройство хранения), твердотельные магнитные устройства и т.п. Устройства 122 и 124 хранения могут представлять собой один и тот же тип устройства хранения или различные типы устройств хранения.
[0092] Динамик 132 функционально соединен с системной шиной 102 с помощью звукового адаптера 130. Приемопередатчик 142 функционально соединен с системной шиной 102 с помощью сетевого адаптера 140. Устройство 162 отображения функционально соединено с системной шиной 102 с помощью адаптера 160 устройства отображения.
[0093] Первое пользовательское устройство 152 ввода, второе пользовательское устройство 154 ввода и третье пользовательское устройство 156 ввода функционально соединены с системной шиной 102 с помощью адаптера 150 пользовательского интерфейса. Пользовательские устройства 152, 154 и 156 ввода могут представлять собой любое из клавиатуры, мыши, дополнительной клавиатуры, устройства захвата изображения, устройства определения движения, микрофона, устройства, включающего в себя функциональные возможности по меньшей мере двух из предшествующих устройств, и т.п. Конечно, также можно использовать и другие типы устройств ввода при сохранении сущности настоящего изобретения. Пользовательские устройства 152, 154 и 156 ввода могут представлять собой один и тот же тип пользовательского устройства ввода или различные типы пользовательских устройств ввода. Пользовательские устройства 152, 154 и 156 ввода используют для ввода информации в систему 1200 обработки и вывода информации из нее.
[0094] Конечно, система 1200 обработки также может включать в себя другие элементы (не показаны), равно как и некоторые элементы могут отсутствовать, что будет вполне понятно специалисту в данной области. Например, различные другие устройства ввода и/или устройства вывода могут быть включены в систему 400 обработки в зависимости от их конкретного варианта реализации, что вполне понятно обычному специалисту в данной области. Например, можно использовать различные типы беспроводных и/или проводных устройств ввода и/или вывода. Более того, как будет вполне понятно обычному специалисту в данной области, также можно использовать дополнительные процессоры, контроллеры, запоминающие устройства и т.п. в различных конфигурациях. Обычному специалисту в данной области будут вполне понятны эти и другие вариации системы 1200 обработки с учетом идей настоящего изобретения, представленных в настоящем документе.
[0095] Как показано в блоке 5 на Фиг. 1, в некоторых вариантах осуществления способ включает приведение в действие основного привода с целью регулировки по меньшей мере одного направляющего подшипника для компенсации разности между отклонениями радиального зазора и базовым радиальным зазором.
[0096] На Фиг. 9 представлена блок-схема, на которой показаны возможные пути прохождения сигнала 355 о расстоянии, полученного датчиком 205 приближения при измерении радиального зазора. В процессе работы датчик 205 приближения измеряет расстояние D радиального зазора 215, 415, 515, 615, 715 для генерирования сигнала 355 о расстоянии. Затем датчик 305 приближения передает сигнал 355 о расстоянии в систему 1100 управления, которая выполнена с возможностью анализа сигнала 355 о расстоянии. Система 1100 управления может иметь множество форм физического исполнения и может включать в себя, в качестве примера, интегрированное устройство питания и обработки сигнала или отдельные устройства питания и обработки сигнала, соединенные вместе. Система 1100 управления может быть цифровой или аналоговой и управляться программируемым логическим контроллером (ПЛК) или релейно-контактной логической схемой. В одном примере осуществления система 1100 управления включает в себя анализатор 1104 корректирующего радиального зазора, который сравнивает значение сигнала 355 о расстоянии с запрограммированным диапазоном 357. Программируемый диапазон 357 может включать в себя значения, хранящиеся в модуле для определения базового радиального зазора, которые могут храниться в запоминающем устройстве 43 системы 1100 управления. Система 1100 управления затем может отправлять корректирующий сигнал 362 на основной привод 230, если сигнал 355 о расстоянии отличается от запрограммированного диапазона 357 (например, не является его элементом). В одном варианте осуществления, если сигнал 355 о расстоянии выходит за пределы запрограммированного диапазона 357, корректирующий сигнал 362 направляет вкладыш 210, 410, 510, 610, 710 к валу 220, 420, 520, 620, 720. В одном варианте осуществления, если сигнал 355 о расстоянии не выходит за пределы запрограммированного диапазона 357, корректирующий сигнал 362 отводит вкладыш 210, 410, 510, 610, 710 от вала 220, 420, 520, 620, 720. В некоторых примерах осуществления регулятор 245, 445, 645, 745 вкладыша выполнен с возможностью перемещения вкладыша 210, 410, 510, 610, 710 направляющего подшипника вдоль радиальной плоскости, определяемой центром C вращения вала 220, 420, 520, 620, 720 в ответ на корректирующий сигнал 362. В других примерах осуществления регулятор 245, 445, 645, 745 вкладыша может регулировать шаг вкладыша 220, 420, 520, 620, 720 направляющего подшипника в ответ на корректирующий сигнал 362. Компоненты примера системы регулировки направляющего подшипника предпочтительно выполнены из маслостойких материалов.
[0047] В одном примере осуществления основной привод 230 выдает тестовый сигнал о местоположении в систему 1100 управления для подтверждения местоположения вкладыша 210, 410, 510, 610, 710 радиального направляющего подшипника.
[0097] Настоящее изобретение может представлять собой систему, способ и/или компьютерный программный продукт на любом возможном уровне технической детализации интеграции. Компьютерный программный продукт может обеспечивать способ поддержания радиального зазора между регулируемым направляющим подшипником и валом турбины. Компьютерный программный продукт может включать в себя машиночитаемый носитель данных (или носитель), имеющий на нем машиночитаемые программные команды для реализации процессором аспектов настоящего изобретения. Например, в настоящем описании предложен компьютерный программный продукт, содержащий энергонезависимый машиночитаемый носитель данных, имеющий реализованный в нем машиночитаемый программный код. Машиночитаемый программный код может обеспечивать стадии измерения базового радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины. Регулятор вкладыша может находиться в зацеплении с по меньшей мере одним направляющим подшипником. Регулятор вкладыша может включать в себя основной привод в соединении с по меньшей мере одним направляющим подшипником через передаточный механизм, причем регулятор вкладыша, приведенный в действие движущим усилием от основного привода, перемещает этот по меньшей мере один направляющий подшипник в направлении регулировки радиального зазора. Способ может дополнительно включать измерение отклонений радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины и вычисление разности между отклонениями радиального зазора и базовым радиальным зазором. В некоторых вариантах осуществления способ включает приведение в действие основного привода для регулировки по меньшей мере одного направляющего подшипника с целью компенсации разности между отклонениями радиального зазора и базовым радиальным зазором.
[0098] Машиночитаемый носитель данных может представлять собой материальное устройство, способное сохранять и хранить команды для применения устройством исполнения команд. Машиночитаемый носитель данных может представлять собой, например, без ограничений, электронное устройство хранения, магнитное устройство хранения, оптическое устройство хранения, электромагнитное устройство хранения, полупроводниковое устройство хранения или любую подходящую комбинацию вышеупомянутого. Неисчерпывающий список более конкретных примеров машиночитаемого носителя данных включает в себя следующее: портативная компьютерная дискета, жесткий диск, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ или флэш-память), статическое оперативное запоминающее устройство (СОЗУ), портативное постоянное запоминающее устройство для компакт-дисков (CD-ROM), универсальный цифровой диск (DVD), карта памяти, дискета, устройство с механическим кодированием, такое как перфокарты или выпуклые структуры в канавке с записанными на них командами, и любая подходящая комбинация вышеперечисленного. Машиночитаемый носитель данных, используемый в настоящем документе, не следует рассматривать как транзиторные сигналы как таковые, такие как радиоволны или другие свободно распространяющиеся электромагнитные волны, электромагнитные волны, распространяющиеся через волновод или другие передающие среды (например, световые импульсы, проходящие через оптоволоконный кабель), или электрические сигналы, передаваемые по проводу.
[0099] Машиночитаемые программные команды, описанные в настоящем документе, могут быть загружены на соответствующие вычислительные/обрабатывающие устройства с машиночитаемого носителя данных или на внешний компьютер или внешнее устройство хранения данных посредством сети, например, Интернета, локальной сети, глобальной сети и/или беспроводной сети. Сеть может содержать медные передающие кабели, оптические передающие волокна, беспроводную передачу, маршрутизаторы, брандмауэры, переключатели, шлюзовые компьютеры и/или пограничные серверы. Плата сетевого адаптера или сетевой интерфейс в каждом вычислительном/обрабатывающем устройстве принимает из сети машиночитаемые программные команды и пересылает машиночитаемые программные команды для хранения в машиночитаемом носителе данных в соответствующем вычислительном/обрабатывающем устройстве.
[0100] Машиночитаемые программные команды для реализации операций настоящего изобретения могут представлять собой команды ассемблера, команды архитектуры набора команд (ISA), машинные команды, машинно-зависимые команды, микрокод, команды встроенного программного обеспечения, данные о настройках состояния или либо исходный код, либо объектный код, написанный в любой комбинации из одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как SMALLTALK, C++ или т.п., а также традиционные процедурные языки программирования, такие как язык программирования «C» или подобные языки программирования. Машиночитаемые программные команды могут исполняться полностью на компьютере пользователя, частично на компьютере пользователя как автономный пакет программного обеспечения, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем случае удаленный компьютер можно соединить с компьютером пользователя посредством сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или может быть выполнено соединение с внешним компьютером (например, через интернет с помощью поставщика услуг интернета). В некоторых вариантах осуществления электронная схема, включая, например, программируемую логическую схему, программируемые пользователем вентильные матрицы (FPGA) или программируемые логические матрицы (PLA), могут исполнять машиночитаемые программные команды путем использования информации о состоянии машиночитаемых программных команд для индивидуальной настройки электронных схем, чтобы осуществлять аспекты настоящего изобретения.
[0101] Аспекты настоящего изобретения описаны в настоящем документе со ссылкой на иллюстрации структурных схем и/или блок-схемы способов, устройств (систем) и компьютерных программных продуктов в соответствии с вариантами осуществления изобретения. Следует понимать, что каждый блок на иллюстрациях структурных схем и/или блок-схемах и комбинации блоков на иллюстрациях структурных схем и/или блок-схемах могут быть реализованы с помощью машиночитаемых программных команд.
[0102] Компьютерные программные команды могут быть переданы процессору универсального компьютера, специализированного компьютера или другому программируемому устройству обработки данных для создания вычислительной машины таким образом, что команды, которые исполняются с помощью процессора компьютера или другого программируемого устройства обработки данных, создают средства для реализации указанных функций/действий, определенных в структурной схеме, и/или блок-схеме, или блоках. Эти машиночитаемые программные команды также могут храниться в машиночитаемом носителе данных, который может управлять компьютером, программируемым устройством обработки данных и/или другими устройствами, чтобы они функционировали определенным образом, так что машиночитаемый носитель данных, имеющий команды, хранящиеся на нем, содержит готовое изделие, включая команды, которые реализуют аспекты функции/действия, определенные в структурной схеме, и/или блок-схеме, или блоках.
[0103] Машиночитаемые программные команды также могут быть загружены на компьютер, другой программируемый аппарат обработки данных или другое устройство с целью вызова серии операционных стадий для выполнения на компьютере, другом программируемом аппарате или другом устройстве для создания реализованного на компьютере способа, так что команды, которые исполняются на компьютере, другом программируемом аппарате или другом устройстве обеспечивают функции/действия, определенные в структурной схеме, и/или блок-схеме, или блоках.
[0104] После описания предпочтительных вариантов осуществления регулируемого направляющего подшипника (которые рассматриваются как иллюстративные и не имеющие ограничительного характера) следует отметить, что в свете изложенных выше идей специалистами в данной области могут быть внесены изменения и вариации. Таким образом, следует понимать, что в конкретные варианты осуществления, описанные в настоящем документе, могут быть внесены изменения, которые входят в объем изобретения, изложенного в приложенной формуле изобретения. Таким образом, описав аспекты изобретения с подробностями и особенностями, требуемыми патентным законодательством, заявленный и желательный предмет изобретения, защищенный патентом США на изобретение, изложен в приложенной формуле изобретения.
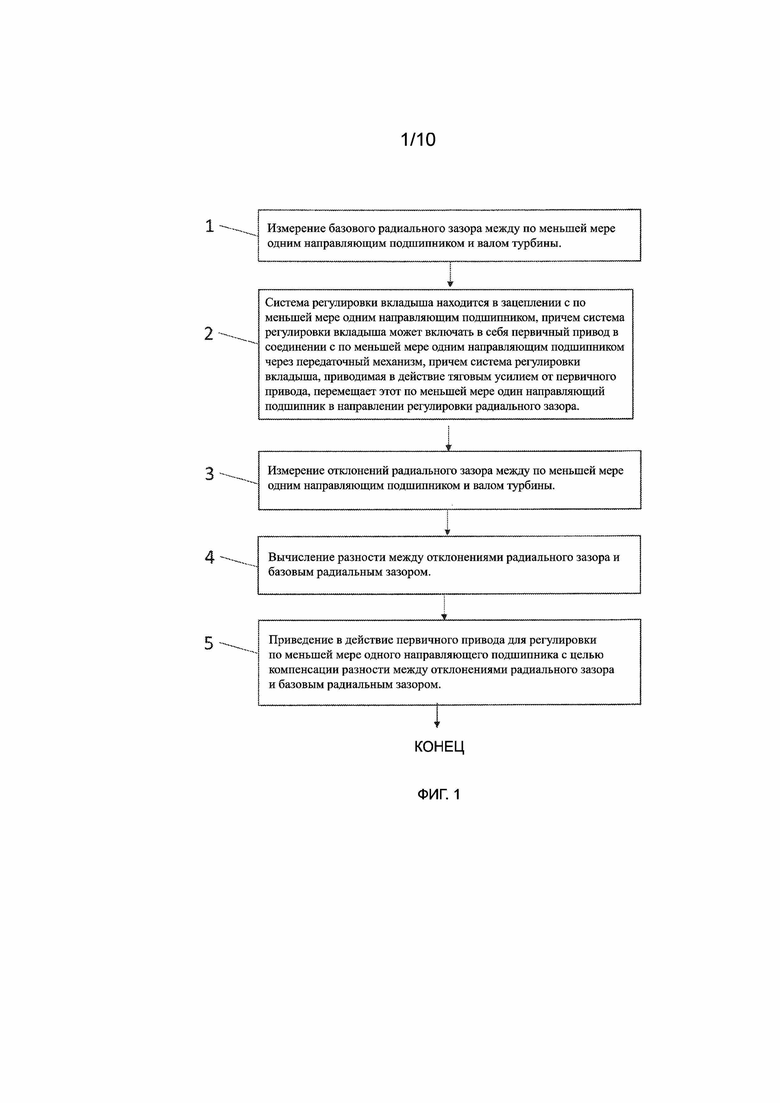
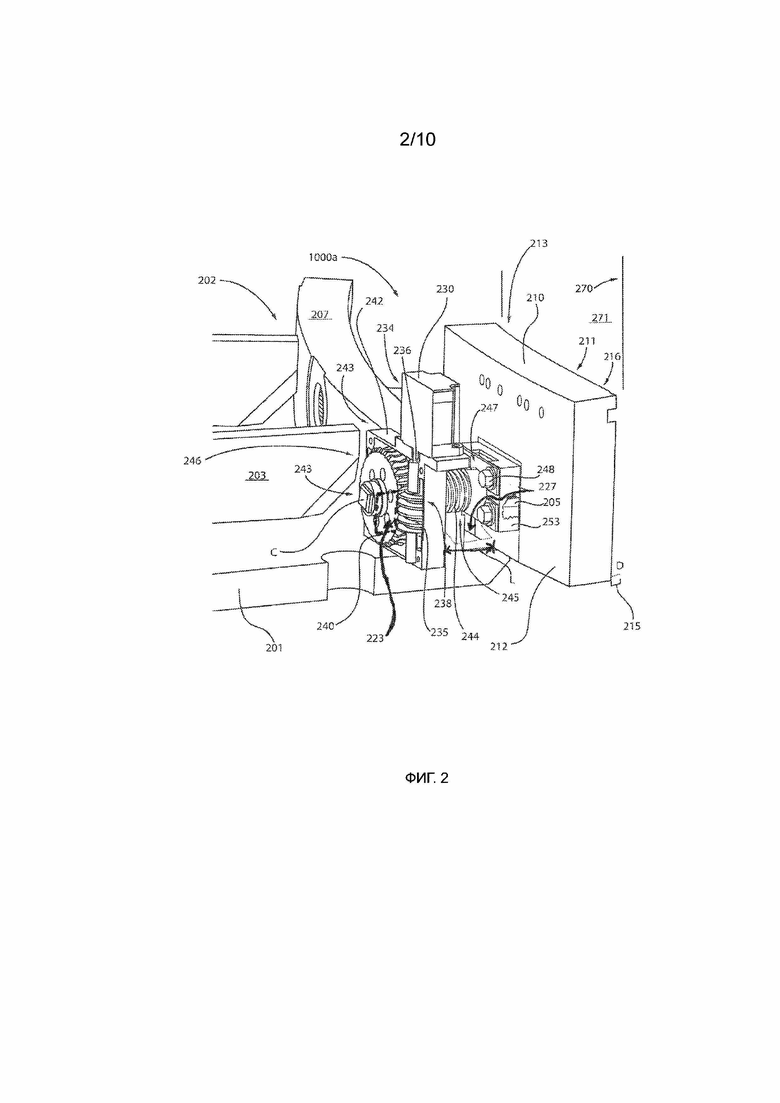

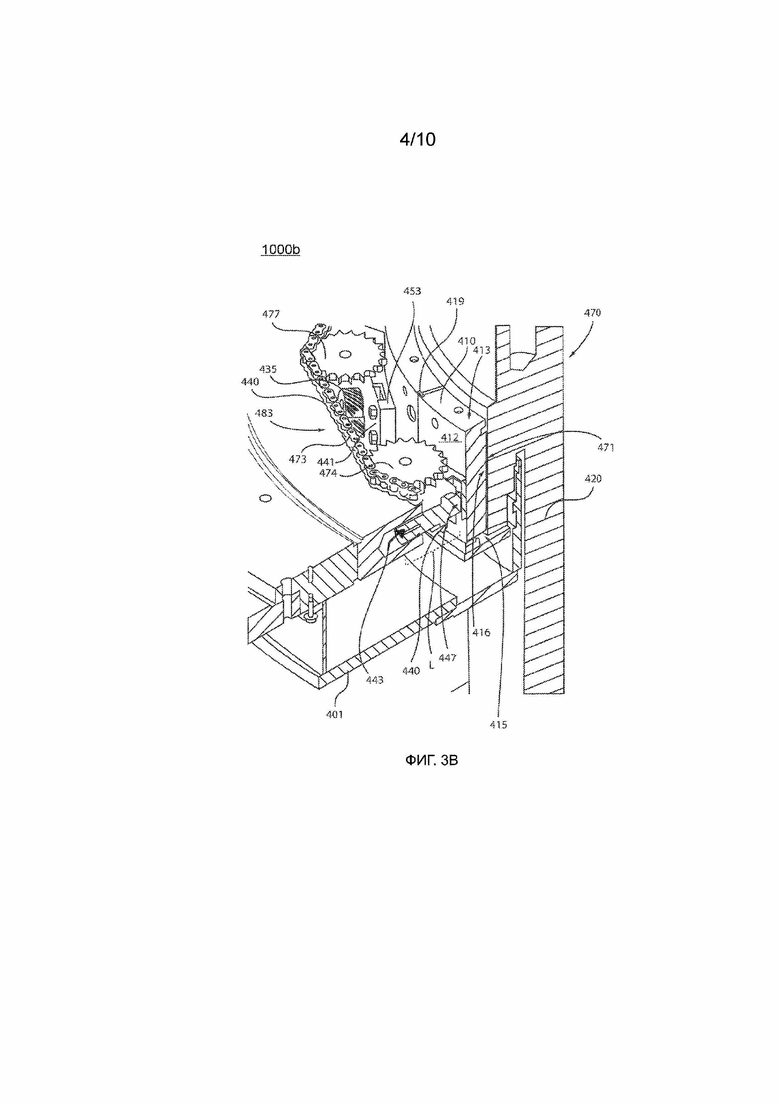

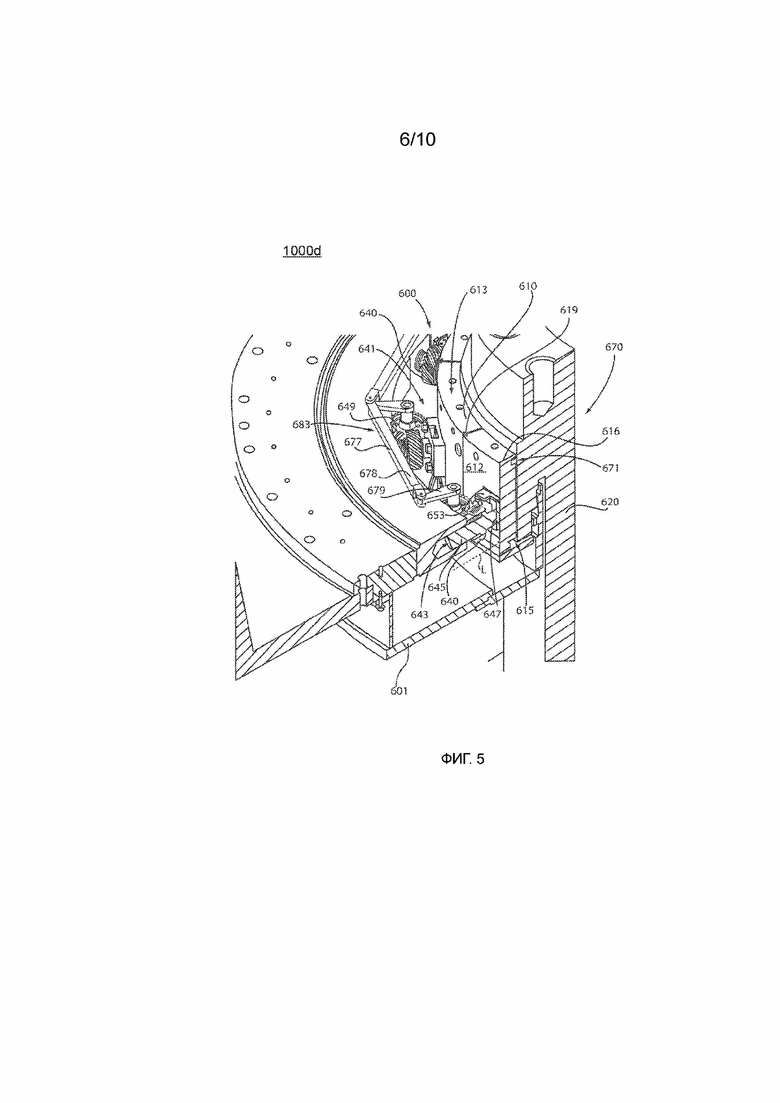



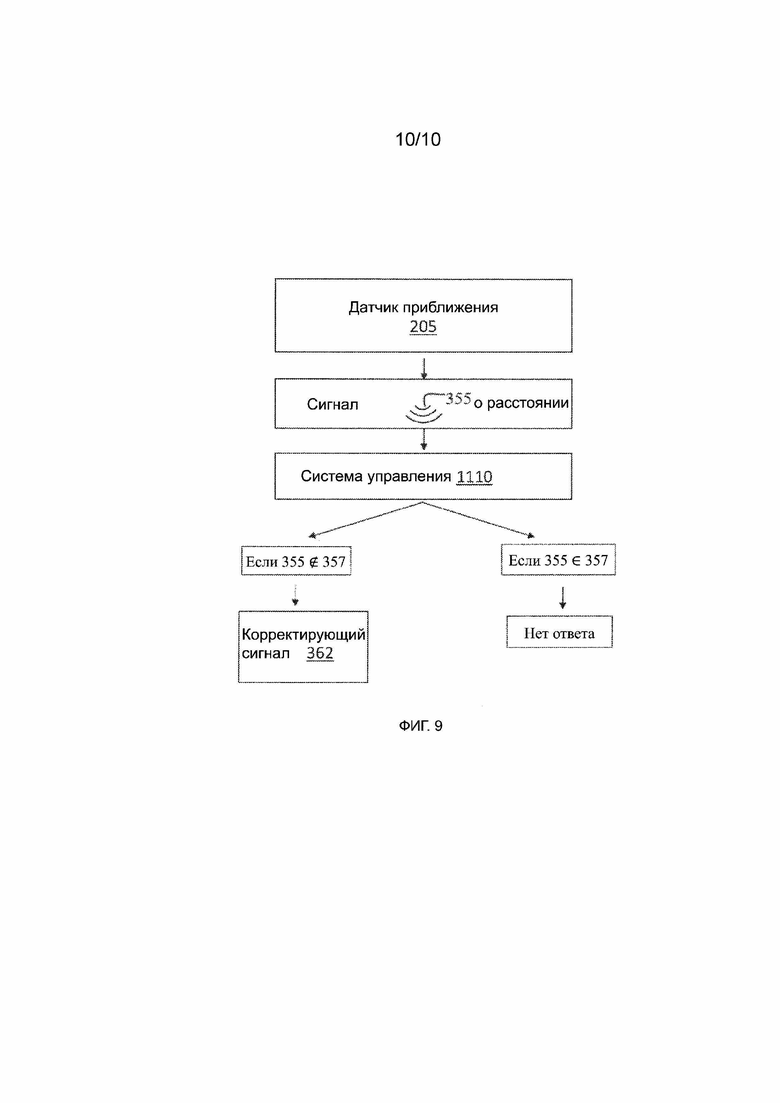
Группа изобретений относится к гидродинамическим подшипникам с отдельными вкладышами направляющего подшипника, а именно к гидродинамическим подшипникам, используемым в гидроэлектрической промышленности. Система 1000а направляющего подшипника 210 включает в себя регулятор 245 вкладыша для перемещения по меньшей мере одного подшипника 210 в направлении регулировки радиального зазора 215. Система 1000а может дополнительно включать в себя датчик 205 для измерения отклонений зазора 215. В некоторых вариантах осуществления система 1000а подшипника 210 включает в себя контроллер, который принимает сигнал о расстоянии от датчика 205, измеряющего зазор 215, и дает команду регулятору 245 на перемещение по меньшей мере одного подшипника 210 для компенсации отклонений зазора 215. Группа изобретений направлена на уменьшение влияния колебаний радиального зазора направляющего подшипника между вкладышами направляющего подшипника и валом гидроэлектрического узла турбины. 4 н. и 16 з.п. ф-лы, 10 ил.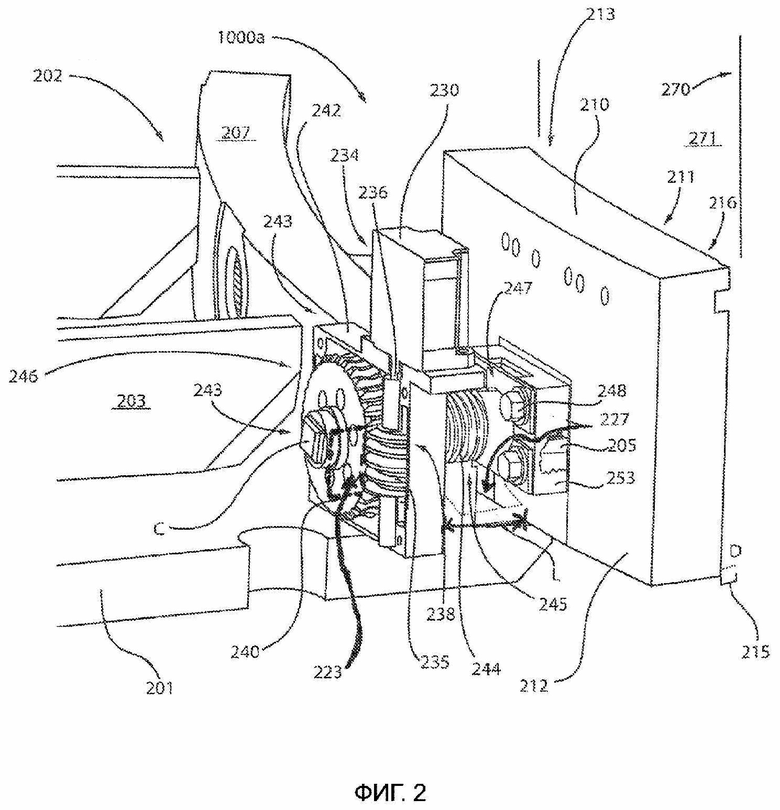
1. Способ поддержания радиального зазора между регулируемым направляющим подшипником и валом турбины, включающий:
измерение базового радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины;
введение системы регулировки вкладыша в зацепление с по меньшей мере одним направляющим подшипником, причем регулятор вкладыша включает в себя основной привод в соединении с по меньшей мере одним регулируемым направляющим подшипником через передаточный механизм, при этом система регулировки вкладыша приводится в действие движущим усилием от основного привода, который перемещает по меньшей мере один направляющий подшипник в направлении регулировки радиального зазора;
измерение отклонений радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины;
вычисление разности между отклонениями радиального зазора и базовым радиальным зазором; и
приведение в действие основного привода для регулировки по меньшей мере одного направляющего подшипника с целью компенсации разности между отклонениями радиального зазора и базовым радиальным зазором.
2. Способ по п. 1, представляющий собой реализуемый компьютером способ.
3. Способ по п. 1, в котором система регулировки вкладыша включает в себя винтовой регулятор вкладыша, находящийся в контакте с обратной поверхностью по меньшей мере одного направляющего подшипника, активную шестерню, находящуюся в соединении с винтовым регулятором вкладыша неколлинеарно по отношению к длине регулятора вкладыша.
4. Способ по п. 3, в котором активная шестерня представляет собой червячную шестерню.
5. Способ по п. 4, в котором червячная шестерня находится в винтовом зацеплении с шестерней приводного вала, которая приводится в действие основным приводом через приводной вал.
6. Способ по п. 3, в котором активная шестерня приводится в движение цепью, которая приводится в действие основным приводом, причем цепь соединяет множество регуляторов вкладыша со множеством из по меньшей мере одного направляющего подшипника.
7. Способ по п. 3, в котором активная шестерня приводится в движение плечом рычага, соединенным с рычажным механизмом, который приводится в действие основным приводом, причем рычажный механизм соединяет множество регуляторов вкладыша со множеством из по меньшей мере одного направляющего подшипника.
8. Способ по п. 1, в котором передаточный механизм содержит клиновую систему, которая проходит между регулятором вкладыша системы регулировки вкладыша и обратной поверхностью по меньшей мере одного направляющего подшипника.
9. Способ по п. 1, в котором основной привод выполнен с возможностью подачи тестового сигнала о местоположении в систему управления, приводящую в действие основной привод, для подтверждения местоположения по меньшей мере одного направляющего подшипника.
10. Энергонезависимое готовое изделие, материально воплощающее в себе машиночитаемую программу, которая при выполнении побуждает компьютер выполнять способ по п. 1.
11. Система направляющего подшипника, содержащая:
систему регулировки вкладыша для перемещения по меньшей мере одного подшипника в направлении регулировки радиального зазора, причем радиальный зазор представляет собой расстояние между крайним концом вала по меньшей мере одного вкладыша подшипника и крайним периметром узла вала;
датчик для измерения отклонений радиального зазора; и
систему управления, которая принимает сигнал о расстоянии от датчика, измеряющего радиальный зазор, и дает команду регулятору вкладыша на указанное перемещение по меньшей мере одного подшипника для компенсации указанных отклонений радиального зазора.
12. Система направляющего подшипника по п. 11, дополнительно содержащая основной привод, создающий движущее усилие.
13. Система направляющего подшипника по п. 12, дополнительно содержащая зубчатую систему, при этом регулятор вкладыша входит в зацепление с системой зубчатой передачи, причем регулятор вкладыша имеет первый конец и конец вкладыша, отдаленный в дистальном направлении от первого конца на некоторую длину, при этом длина определяет первую плоскость, причем конец вкладыша входит в зацепление с узлом вкладыша подшипника, включая по меньшей мере один подшипник, при этом узел вкладыша подшипника содержит вкладыш подшипника, имеющий крайний относительно вала конец, причем основной привод входит в зацепление с системой зубчатой передачи во второй плоскости, при этом вторая плоскость не совпадает по протяженности с первой плоскостью.
14. Система направляющего подшипника по п. 13, в которой первая плоскость представляет собой горизонтальную плоскость, а вторая плоскость направлена по касательной к этой горизонтальной плоскости.
15. Система направляющего подшипника по п. 13, в которой узел вкладыша подшипника дополнительно содержит разделитель, прикрепленный к обратной стороне вкладыша подшипника, при этом разделитель охватывает конец вкладыша регулятора вкладыша.
16. Система направляющего подшипника по п. 13, в которой регулятор вкладыша выполнен с возможностью перемещения вкладыша подшипника вдоль радиальной плоскости, определяемой центром вращения узла вала, причем радиальная плоскость имеет одинаковую протяженность с первой плоскостью.
17. Система направляющего подшипника по п. 12, дополнительно содержащая систему зубчатой передачи, включающую в себя червячный винт, входящий в зацепление с червячным колесом, причем основной привод выполнен с возможностью передачи движущего усилия к системе зубчатой передачи, регулятор вкладыша входит в зацепление с системой зубчатой передачи, при этом регулятор вкладыша имеет первый конец и конец вкладыша, узел вкладыша направляющего подшипника содержит вкладыш направляющего подшипника, имеющий сторону вала, расположенную в дистальном направлении от обратной стороны, причем конец вкладыша регулятора вкладыша входит в зацепление с узлом вкладыша направляющего подшипника, а датчик приближения выполнен с возможностью генерирования сигнала о расстоянии, содержащего данные о расстоянии радиального зазора.
18. Система направляющего подшипника по п. 17, дополнительно содержащая узел механической трансмиссии, расположенный между основным приводом и системой зубчатой передачи и входящий в зацепление с основным приводом и системой зубчатой передачи, причем узел механической трансмиссии выполнен с возможностью передачи движущего усилия от основного привода перемещения к системе зубчатой передачи.
19. Система направляющего подшипника по п. 18, в которой узел механической трансмиссии выбран из группы, состоящей из цепи и звездочек, круговой зубчатой рейки и ведущих шестерен, рычажного механизма и шестерен, клиновой системы и их комбинации.
20. Система управления, содержащая:
запоминающее устройство для хранения значений базового радиального зазора для расстояния между по меньшей мере одним направляющим подшипником и валом турбины;
приемник для приема измеренных отклонений радиального зазора между по меньшей мере одним направляющим подшипником и валом турбины;
анализатор корректирующего радиального зазора, который использует аппаратный процессор для выполнения набора команд с целью сравнения измеренных отклонений радиального зазора со значениями базового радиального зазора для обеспечения размера корректирующего радиального зазора; и
по меньшей мере один генератор сигнала в соединении с регулятором вкладыша, который перемещает этот по меньшей мере один направляющий подшипник в направлении регулировки радиального зазора.
| УПАКОВКА И СПОСОБ ИЗГОТОВЛЕНИЯ УПАКОВКИ | 2021 |
|
RU2832298C2 |
| JP 2005326155 A, 19.09.2019 | |||
| Способ выплавки среднеуглеродистого ферромарганца | 2018 |
|
RU2710706C1 |
| CN 203743221 U, 30.07.2014 | |||
| Направляющий подшипник вертикальной гидромашины | 1988 |
|
SU1585541A1 |

