Область техники, к которой относится изобретение
Настоящее изобретение относится к устройствам, предназначенным для качания и укачивания в колясках детей раннего возраста, чтобы помочь им заснуть, и, в частности касается портативного и умного устройства качания коляски для подготовки ребенка ко сну.
Уровень техники
Существуют некоторые устройства для автоматического качания и укачивания детских колясок. Эти устройства позволяют сообщать коляске возвратно-поступательное движение, чтобы укачивать ребенка во время его засыпания. Эти устройства заменяют родителей на этапе успокаивания и отхода ко сну их ребенка. Действительно, для удобства родителей коляску часто используют в качестве второй кроватки для ребенка, который должен много спать в первые месяцы своей жизни. Когда родители и ребенок находятся за пределами дома, ребенок может оказаться в окружающих условиях, не способствующих засыпанию, и простое приведение коляски в движение может оказывать успокаивающее действие. В некоторых случаях, например, в ресторане, в гостях у друзей или даже в общественном месте, возвратно-поступательное движение, сообщаемое коляске родителем, чтобы укачать ребенка и помочь ему заснуть, может быть утомительным. В частности, в этих случаях может оказаться очень полезным применение устройства для автоматического укачивания. Однако эти устройства имеют свои недостатки.
Устройство для укачивания первого типа, описанное, например, в документах FR2651980 и WO2014/013482, содержит ролик или фрикционное колесико, предназначенное для привода одного из колес коляски. Недостатком устройства этого типа является то, что его необходимо крепить на коляске, чтобы сделать его функциональным, и, следовательно, адаптировать к каждому типу коляски.
Второй тип качающего устройства представляет собой платформу, на которую опирается одно или несколько колес коляски. Такие устройства описаны в документах ЕР2418140 и ЕР0415736. Однако, учитывая их значительный размер, они не предназначены для использования во время прогулок за пределами дома.
В документе DE102005004501 описано устройство, позволяющее создавать возвратно-поступательное движение и качание детской кроватки или коляски.
Наконец, в документе GB 2 432 307 описано качающее устройство для коляски, содержащее две части, каждая из которых имеет основание, входящее в контакт с землей, и платформу. Одна из частей является ведущей и содержит двигатель, выполненный с возможностью приведения в движение платформы относительно ее основания. Колесо коляски устанавливают на ведущую часть, а второе колесо - на вторую часть, называемую ведомой.
Другой недостаток этих систем состоит в том, что засыпание ребенка обусловлено особым непрерывным возвратно-поступательным движением, производимым этими устройствами. Действительно, эти устройства работают некоторое время, останавливаясь в соответствии с циклами, заданными или определенными пользователем, и с заданной частотой, но не учитывают других параметров, характерных для ребенка и связанных с окружающей средой, которые могут помешать этой функции.
Кроме того, запуск и остановка этих устройств не являются практичными, когда речь идет о приведении в действие переключателя, находящегося на устройстве под коляской. Это усложнение использования приводит к появлению привычки у родителей оставлять устройство работающим дольше, чем это вызвано необходимостью.
Раскрытие сущности изобретения
Задачей изобретения является создание устройства для качания коляски, которое находится рядом с ребенком на этапе, предшествующем засыпанию, которое позволяет устранить вышеупомянутые недостатки и которое облегчает запуск и остановку.
Таким образом, объектом изобретения является устройство качания коляски, содержащее по меньшей мере один моторизованный элемент, оснащенный верхней площадкой, которая перемещается возвратно-поступательным движением относительно неподвижной площадки, опирающейся на землю, при этом наружная сторона верхней площадки выполнена с возможностью установки на ней колеса коляски. Согласно главным отличительным признакам изобретения, устройство содержит средство для автоматического запуска возвратно-поступательного движения произвольным жестом пользователя, который толкает коляску, чтобы привести в движение верхнюю площадку моторизованного элемента.
Краткое описание чертежей
Задачи, объекты и отличительные признаки изобретения будут более очевидны из нижеследующего описания со ссылками на чертежи, на которых:
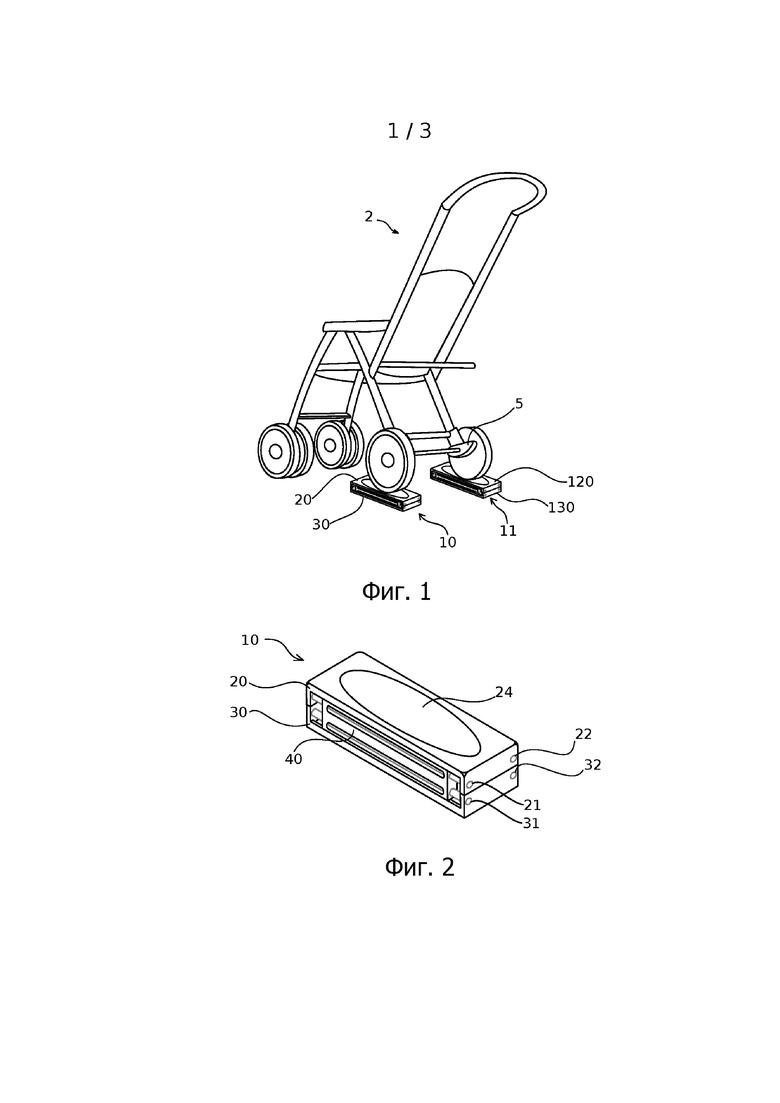
на фиг. 1 представлена общая схема заявленного устройства и коляски;
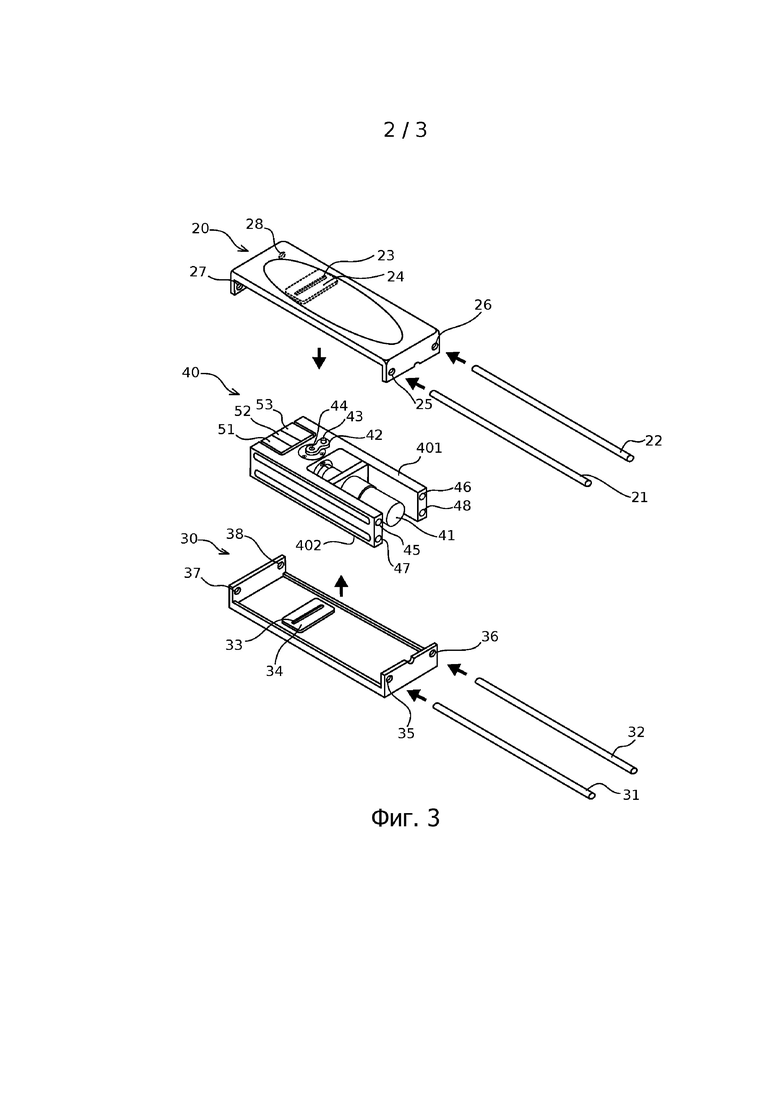
на фиг. 2 представлено заявленное устройство, показанное в изометрии;
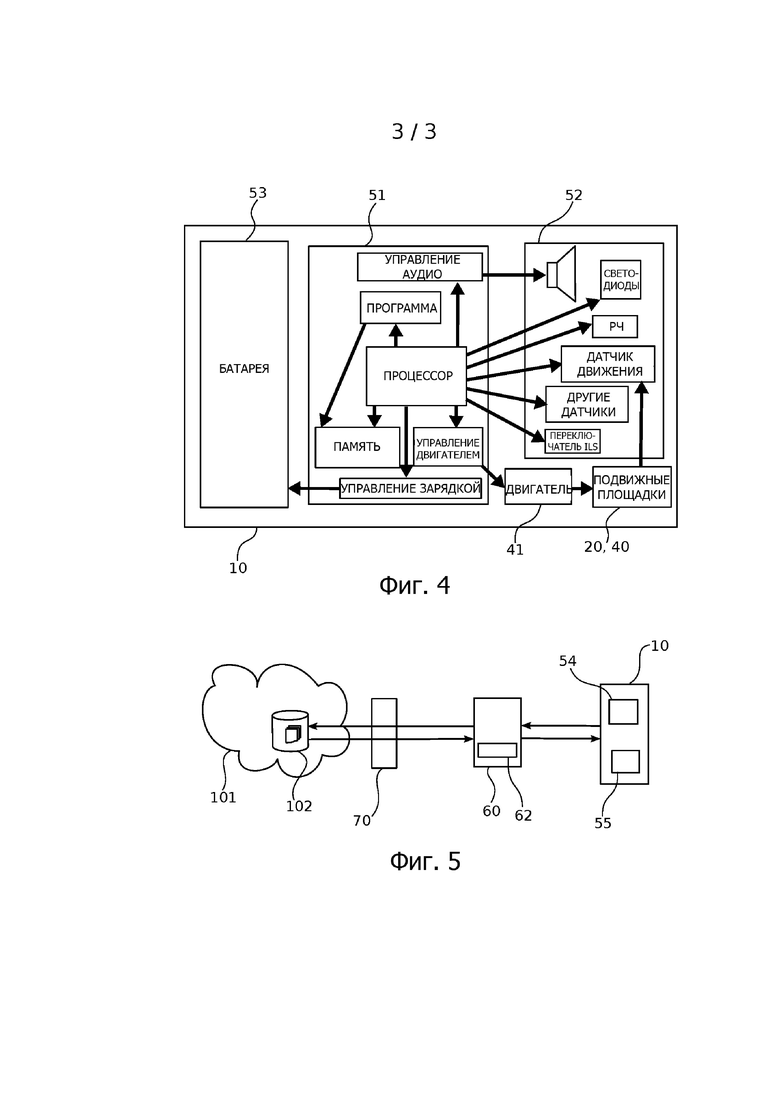
на фиг. 3 показано заявленное устройство, вид с пространственным разделением деталей;
на фиг. 4 показана блок-схема электрической цепи заявленного устройства;
на фиг. 5 показана общая схема использования заявленного устройства в качестве устройства с функцией выхода в интернет.
Осуществление изобретения
Механические аспекты устройства
Заявленное устройство содержит по меньшей мере один главный элемент 10, оснащенный двигателем. Согласно предпочтительному варианту осуществления изобретения, устройство содержит вспомогательный элемент 11. Предпочтительно вспомогательный элемент не является моторизованным. Оба элемента предназначены для установки на каждом из них заднего колеса коляски 2, как показано на фиг. 1. Главный элемент называется также моторизованным элементом. Каждый элемент 10 и 11 имеет соответственно неподвижную площадку 30, 130, опирающуюся на землю, и по меньшей мере одну подвижную площадку 20, 120, наружная сторона которой выполнена с возможностью установки на ней заднего колеса коляски 2, при этом тормоз 5 коляски приводят в действие, чтобы заблокировать вращение задних колес.
Как показано на фиг. 2, моторизованный элемент 10 содержит неподвижную площадку 30, опирающуюся на землю, промежуточную площадку 40, подвижную относительно неподвижной площадки, и верхнюю площадку 20, которая тоже является подвижной относительно промежуточной площадки. Верхняя площадка 20 содержит средства, препятствующие случайному сходу колеса с площадки, такие как противоскользящее покрытие 24 или углубление в виде чашечки. Верхняя площадка 120 вспомогательного элемента 11 содержит такие же средства.
Моторизованный элемент 10 содержит двигатель и средства для приведения в возвратно-поступательное движение по прямолинейной траектории промежуточной площадки относительно неподвижной площадки и для приведения в возвратно-поступательное движение по прямолинейной траектории верхней площадки относительно промежуточной площадки. Оба прямолинейных возвратно-поступательных движения происходят вдоль одной оси. Неподвижная и верхняя площадки содержат направляющие средства, такие как стержни 21, 22, 31 и 32, вдоль которых перемещается скольжением промежуточная площадка.
Как показано на фиг. 3, промежуточная площадка 40 моторизованного элемента 10 содержит верхнюю сторону 401, на которой расположена верхняя площадка 20, и нижнюю сторону 402, не показанную на фигуре, на которой расположена неподвижная площадка 30. Моторизованный элемент 10 содержит двигатель 41, закрепленный на промежуточной площадке 40. При помощи не показанной на фигуре системы зубчатых колес, содержащей конические шестерни для угловой передачи, двигатель 41 вращает ось 44, на которой закреплена ручка 42. Таким образом, ручку 42 приводят во вращение вокруг оси 44, на которой она закреплена одним из своих концов, тогда как другой свободный конец ручки содержит деталь 43, называемую цапфой. Двигатель 41 приводит также во вращение вторую ось и вторую ручку, содержащую цапфу на своем свободном конце, которые не показаны на фигуре, так как находятся с не видимой стороны 402 промежуточной площадки. Обе ручки имеют идентичную форму и вращаются в плоскостях, параллельных между собой и параллельных относительно земли, на которую опирается неподвижная площадка 30.
Верхняя площадка 20 содержит паз 23, выполненный на детали 24, закрепленной на внутренней стороне верхней площадки, то есть напротив верхней стороны 401 промежуточной площадки. Точно так же, неподвижная площадка 30 содержит деталь 34 с пазом 33, при этом деталь 34 закреплена на внутренней стороне неподвижной площадки 20, то есть напротив стороны 402 промежуточной площадки. Во время соединения верхней площадки 20 и промежуточной площадки 40 цапфу 43 располагают в пазу 23. Точно так же, во время соединения неподвижной площадки и промежуточной площадки цапфу второй ручки располагают в пазу 33. Когда моторизованный элемент 10 полностью собран, стержни 21 и 22 вставляют в цилиндрические полости 45 и 46 промежуточной площадки 40 и крепят в соответствующих отверстиях 25, 27 и 26, 28 верхней площадки 20. Точно так же, стержни 31 и 32 вставляют в цилиндрические полости 47 и 48 промежуточной площадки 40 и крепят в соответствующих отверстиях 35, 37 и 36, 38 неподвижной площадки 30.
Запуск двигателя приводит к вращению оси 44 ручки 42, которая через свою цапфу 43, перемещающуюся скольжением в пазу 23, приводит в возвратно-поступательное движение верхнюю площадку 20 относительно промежуточной площадки. Точно так же, двигатель приводит во вращение ось второй ручки, которая через свою цапфу, перемещающуюся скольжением в пазу 33, приводит в возвратно-поступательное движение промежуточную площадку 40 относительно неподвижной площадки. Во время этих возвратно-поступательных движений промежуточная площадка перемещается скольжением вдоль стержней 21, 22, 31 и 32. Ручки установлены на своих осях таким образом, чтобы рычаги обеих ручек не располагались в линию, а образовали угол, составляющий от 90 до 180° и предпочтительно равный 150°. Этот угол позволяет слегка смещать движения обеих площадок таким образом, чтобы, когда промежуточная площадка меняет направление, верхняя площадка, запаздывающая относительно промежуточной площадки, еще не изменила направление, поэтому ее скорость относительно земли снижается в момент изменения направления.
Эта конфигурация с двойным движением имеет целый ряд преимуществ. Действительно, колесо коляски, установленное на моторизованном элементе заявленного устройства, приводится во вращение верхней площадкой, движение которой ослабляется за счет скорости, снижающейся во время изменений направления, что позволяет избегать слишком сильных толчков коляски.
С другой стороны, благодаря движениям обеих площадок, общая амплитуда движения превышает амплитуду, которую можно было бы получить только с использованием подвижной площадки. Это позволяет получить надлежащую амплитуду и одновременно уменьшить размер устройства.
Кроме того, двигатель, который всегда вращается в одном направлении и с постоянной скоростью, позволяет минимизировать расход энергии.
Предпочтительно запуск циклического возвратно-поступательного движения происходит автоматически в момент ручного включения пользователем первого движения. Эта основная функция более подробно пояснена в описании, приведенном ниже. Вспомогательный элемент 11 не содержит двигателя, но содержит неподвижную площадку и по меньшей мере одну площадку, подвижную относительно неподвижной площадки. Предпочтительно вспомогательный элемент содержит три площадки, аналогичные площадкам моторизованного элемента, при этом промежуточная площадка может свободно перемещаться возвратно-поступательным движением относительно неподвижной площадки, расположенной на земле, а верхняя площадка может свободно перемещаться возвратно-поступательным движением относительно промежуточной площадки, причем оба движения происходят вдоль одной и той же оси. Общая амплитуда перемещения верхней площадки предпочтительно равна амплитуде, получаемой при помощи моторизованного элемента 10.
Поверхности двух элементов 10 и 11, входящие в контакт с землей, оснащены, каждая, противоскользящей колодкой и намагниченной частью, которые предназначены для взаимодействия друг с другом и для удержания обоих элементов слепленными друг с другом. Согласно другому варианту осуществления, один из двух элементов может храниться внутрь полости, выполненной в другом элементе.
Электрические аспекты устройства
Как показано на фиг. 4, моторизованный элемент содержит также модуль 51 контроля и управления, модуль 52 периферийных устройств и модуль зарядки, такой как батарея 53. Модуль контроля и управления содержит электронную плату, имеющую процессор, программу контроля, память и средства управления периферийными устройствами. Модуль 52 периферийных устройств содержит цепь передачи/приема радиочастотного сигнала (РЧ), то есть может дистанционно обмениваться данными с бесконтактным периферийным устройством, и датчик движения, выполненный с возможностью передачи в процессор информации, связанной с беспокойством ребенка. Модуль периферийных устройств содержит также другие датчики, такие как датчик давления, и средства измерения уровня шума, температуры и влажности окружающей среды, устройство аудио, светодиоды и средства для перевода моторизованного элемента в спящий режим, такие как герконовый переключатель (ILS). Датчик давления позволяет устройству определять, когда ребенок находится в коляске.
Переключатель ILS меняет свое состояние, когда оба элемента 10 и 11 входят в контакт, например, когда их намагниченные части взаимодействуют друг с другом. Спящий режим может означать, что двигатель выключен, и площадки заблокированы, но может допускать работу передатчика/приемника РЧ-сигнала. Батарею 53 моторизованного элемента можно подзаряжать при помощи беспроводного электрического зарядного устройства или при помощи адаптера, подключаемого к электрической сети. Вторая батарея, которая выполняет роль резервной батареи, может содержаться во вспомогательном элементе. Вторая батарея подзаряжает первую, когда оба элемента входят в контакт. Моторизованный элемент имеет индикатор зарядки, указывающий пользователю на состояние зарядки батареи. Этот индикатор может представлять собой цветной светодиод. Также светодиод, в зависимости от своего цвета, может показывать состояние устройства, такое как «работа», «спящий режим» и «обмен данными с цифровым терминалом».
Цифровой терминал
Цепь бесконтактной передачи/приема РЧ-сигнала моторизованного устройства 11 предпочтительно основана на связи типа Bluetooth. Как показано на фиг. 5, модуль Bluetooth может обмениваться данными с цифровым терминалом 60 типа смартфона. Этот обмен данными может быть двухсторонним. Мобильный цифровой терминал 60 может быть смартфоном, планшетом, компьютером и содержит сенсорный экран. Цифровой терминал может подключаться через беспроводную связь с базой 102 данных, доступной в сети Интернет 101 через сеть телекоммуникации и геолокализации или другую сеть. Интерфейс или приложение 62, установленное на цифровом терминале, позволяет пользователю контролировать состояние устройства и данные, записанные во время его использования. Данные каждого устройства могут сохраняться в базе 102 данных, доступной через средство 70 идентификации пользователя. На интерфейсе 62 пользователь может найти все свои данные, программы, параметры и т.д. Данные использования могут выводиться на экран, например, в виде графика использования в зависимости от времени.
Программа контроля
Программа 55 контроля, записанная в памяти моторизованного элемента, может исполняться, когда моторизованный элемент не находится в спящем режиме. Таким образом, программа контроля исполняется в отсутствие связи с цифровым терминалом. Программа контроля в основном управляет запуском и остановкой двигателя, продолжительностью рабочих интервалов и их частотой в соответствии с циклом, установленным по умолчанию заранее и записанным в памяти моторизованного элемента. Цикл по умолчанию включает в себя запуск двигателя, его работу в течение времени, составляющего от 2 минут до 4 минут, например, равного 3 минутам, остановку двигателя и перевод устройства в режим «прослушивания», то есть с готовностью к запуску в случае обнаружения движений коляски или плача. Программу контроля по умолчанию можно обновлять через цифровой терминал 60, но она может также меняться автономно по мере использования наподобие экспертной системы.
Программа контроля может адаптироваться благодаря данным, поступающим к ней от моторизованного элемента и записываемым во время его использования. Данные могут быть данными, измеряемыми при помощи датчиков и средств измерения окружающей среды, такими как шум, возбужденное поведение ребенка, температура, влажность и т.д. Адаптация программы контроля соответствует определению или изменению некоторых переменных ее работы на основании параметров, регистрируемых датчиками по мере использования устройства, и определению соответствующего цикла.
Через интерфейс 62 своего цифрового терминала пользователь может решить при запуске устройства, будет ли программа контроля исполнять цикл по умолчанию или адаптированный цикл. Разумеется, через интерфейс 62 цифрового терминала пользователь может сам менять некоторые параметры программы контроля, такие как продолжительность рабочих интервалов и их периодичность в пределах заранее определенного максимального диапазона, чтобы обеспечивать безопасность ребенка и избегать его повторной подготовки ко сну.
Коллаборативная платформа
Доступная через Интернет база 102 данных пополняется владельцами и пользователями заявленного устройства, которые используют приложение на своем цифровом терминале. Использование собираемых данных является анонимным. Они позволяют построить статистическую схему и служат для разработки коллаборативной платформы.
База данных может служить также для разработки новой версии программы контроля и для ее онлайн передачи в распоряжение пользователей. Действительно, на основании собранных данных можно устанавливать взаимосвязи между переменными окружающей среды и необходимостью укачивания ребенка. Следовательно, программа контроля пользователя может также адаптироваться на основании данных, имеющихся на коллаборативной платформе. Эта способность подключаться к информационной сети придает заявленному устройству качество устройства с функцией выхода в интернет.
Далее описание касается работы заявленного устройства.
Когда родителям необходимо укачивать своего ребенка, находящегося в коляске, они отделяют друг от друга два элемента 10 и 11 и располагают их на земле. Неподвижная площадка 30 моторизованного элемента и неподвижная площадка 130 вспомогательного элемента находятся на земле, и каждое из колес коляски, на которых активирован тормоз 5 коляски, устанавливают на одном из элементов.
Устройство запускается произвольным жестом пользователя, толкающим коляску таким образом, чтобы привести в движение верхнюю площадку 20 моторизованного элемента 10. При этом датчик движения передает сообщение в процессор, который запускает двигатель и исполняет программу контроля. Возвратно-поступательное движение площадок приводит к легкому покачиванию коляски. Остановка качания происходит автоматически по истечении достаточно короткого заранее определенного времени, составляющего от 2 до 4 минут. Остановка является постепенной, то есть скорость возвратно-поступательного движения плавно снижается до полной остановки. После остановки двигателя площадки совмещаются таким образом, что моторизованный элемент 10 образует параллелепипед, как показано на фиг. 2. При этом устройство отслеживает любое движение коляски или плач, которые свидетельствуют о том, что ребенок все еще беспокоен, и качание возобновляется автоматически. В любой момент устройство можно запустить опять и возобновить качание при помощи произвольного жеста пользователя. Таким образом, устройство может запускаться несколько раз последовательно в течение коротких интервалов времени, пока ребенок не успокоится.
Пользователь может сам намеренно остановить устройство. Для этого пользователь удерживает коляску, датчик движения передает сигнал в процессор, и модуль контроля и управления передает сигнал остановки в двигатель. Остановка устройства происходит также, когда пользователь отделяет коляску от устройства или когда вынимает ребенка из коляски, которая опирается на устройство. В обоих этих случаях датчик давления обнаруживает изменение веса, и модуль контроля и управления передает сигнал остановки в двигатель.
При каждом использовании устройства происходит запись данных, таких как число последовательных включений устройства, время, уровень окружающего шума, гигрометрические данные, температура. Данные сохраняются в памяти моторизованного элемента в ожидании передачи в цифровой терминал 60.
Связь между цифровым терминалом 60 и моторизованным элементом 10 становится невозможной и не допускается, когда устройство расположено под колесами коляски и работает. Действительно, как только оба элемента оказываются отделенными друг от друга, модуль 54 Bluetooth отключается, тогда как при соединении двух элементов друг с другом за счет магнитного контакта или при введении одного в другой связь становится опять возможной. Это прерывание беспроводной связи, активируемое герконовым переключателем, позволяет устройству не излучать радиоволны, когда его используют и, следовательно, когда оно находится вблизи ребенка.
Сразу при сохранении первых данных программа контроля может адаптироваться в зависимости от содержания данных, как было указано выше.
Например, если число последовательных раз, когда устройство начинает двигаться, превышает 4 (ребенок не может успокоиться, несмотря на последовательные периоды качания), программу контроля изменяют таким образом, чтобы во время последующего использования продолжительность первого цикла укачивания увеличилась. Программу контроля можно адаптировать, благодаря другим данным, например, таким как время суток, окружающая температура и т.д. Кроме того, даже адаптированную программу контроля можно корректировать, чтобы избегать повторной подготовки ребенка к сну. Например, два последовательных рабочих цикла, каждый из которых соответствует засыпанию ребенка, не будут идентичными.
Моторизованный элемент оснащен динамиком, чтобы передавать звуки, такие как колыбельная песня или звуки природы. Пользователь может сам выбирать и записывать эти звуки в память моторизованного элемента через интерфейс 62 цифрового терминала 60.
Благодаря датчику давления моторизованного элемента 10, устройство может также выдавать световой или звуковой сигнал, когда ребенка достают из коляски.
Изобретение относится к области машиностроения, в частности к устройствам качения коляски. Устройство качания содержит моторизованный элемент. Моторизованный элемент оснащен верхней площадкой. Верхняя площадка выполнена с возможностью перемещаться возвратно-поступательным движением относительно неподвижной площадки. Неподвижная площадка расположена на земле. Наружная сторона указанной верхней площадки выполнена с возможностью установки на ней колеса коляски. Достигается повышение компактности устройства. 19 з.п. ф-лы, 5 ил.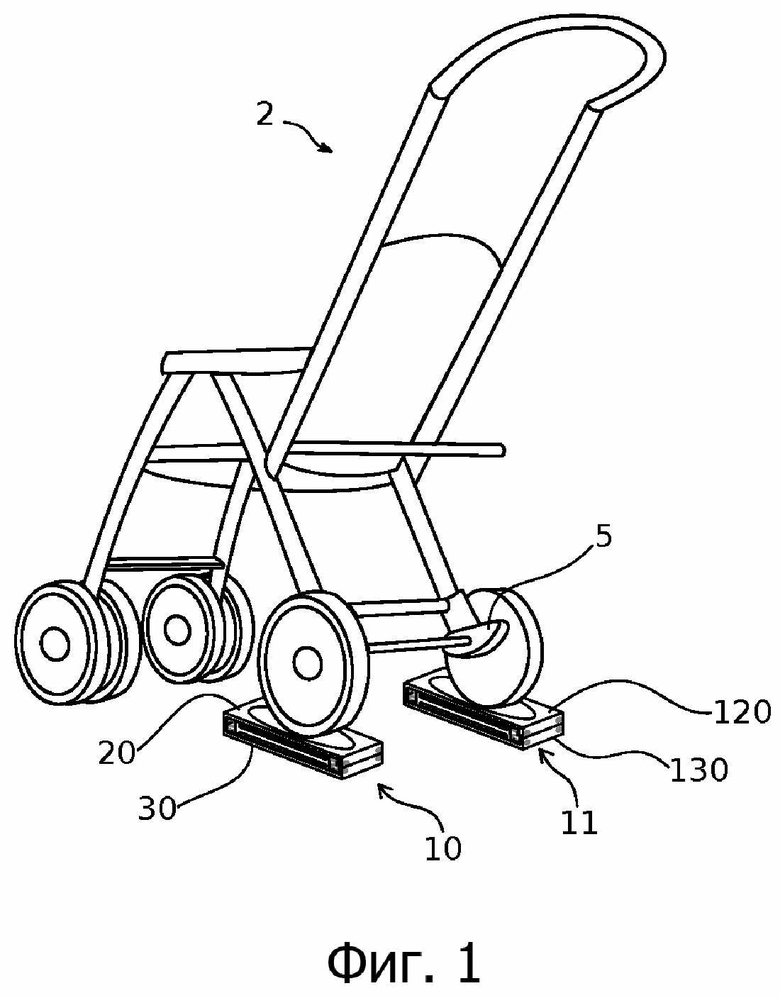
1. Устройство качания коляски (2), содержащее по меньшей мере один моторизованный элемент (10), оснащенный верхней площадкой (20), выполненной с возможностью перемещаться возвратно-поступательным движением относительно неподвижной площадки (30), расположенной на земле, при этом наружная сторона указанной верхней площадки (20) выполнена с возможностью установки на ней колеса коляски,
отличающееся тем, что устройство содержит средство для автоматического запуска возвратно-поступательного движения произвольным жестом пользователя, заключающимся в толкании коляски (2) для приведения в движение указанной верхней площадки (20) моторизованного элемента (10).
2. Устройство по п. 1, в котором указанный моторизованный элемент (10) содержит промежуточную площадку (40), которая является подвижной относительно указанной неподвижной площадки (30) и по которой указанная верхняя площадка (20) выполнена с возможностью перемещаться скольжением.
3. Устройство по п. 1 или 2, в котором моторизованный элемент содержит двигатель (41), закрепленный на указанной промежуточной площадке (40) и выполненный с возможностью приведения во вращение оси (44), на которой закреплен конец ручки (42), при этом указанная ось выполнена с возможностью приводить во вращение указанную ручку в плоскости, параллельной относительно земли, причем указанная ручка, в свою очередь, приводит в возвратно-поступательное движение указанную верхнюю площадку (20) относительно указанной промежуточной площадки (40) при помощи цапфы (43), находящейся на свободном конце указанной ручки и перемещающейся скольжением в пазу (23), расположенном на внутренней стороне указанной верхней площадки (20).
4. Устройство по п. 3, в котором указанный двигатель (41) выполнен с возможностью приведения во вращение второй оси, на которой закреплен конец второй ручки, при этом указанная вторая ось выполнена с возможностью приводить во вращение указанную вторую ручку в плоскости, параллельной относительно земли, при этом указанная вторая ручка, в свою очередь, выполнена с возможностью приводить в возвратно-поступательное движение указанную промежуточную площадку (40) относительно указанной неподвижной площадки (30) при помощи цапфы, находящейся на свободном конце указанной второй ручки и перемещающейся скольжением в пазу (33), расположенном на внутренней стороне указанной неподвижной площадки (30).
5. Устройство по одному из пп. 3 или 4, в котором указанные верхняя (20) и неподвижная (30) площадки содержат направляющие средства (21, 22, 31, 32), вдоль которых выполнена с возможностью перемещения скольжением указанная промежуточная площадка (40).
6. Устройство по п. 4 или 5, в котором рычаги указанных двух ручек не находятся на одной линии, а образуют угол, составляющий от 90° до 180° и предпочтительно равный 150°.
7. Устройство по одному из пп. 1-6, в котором устройство содержит немоторизованный вспомогательный элемент (11), содержащий неподвижную площадку (130) и по меньшей мере одну площадку (120), подвижную относительно указанной неподвижной площадки (130).
8. Устройство по п. 7, в котором указанные верхние площадки (20) и (120) содержат средства, препятствующие случайному сходу колеса с площадки.
9. Устройство по п. 7 или 8, в котором входящие в контакт с землей поверхности указанных двух элементов (10 и 11) оснащены противоскользящей колодкой и намагниченной частью, которые предназначены для взаимодействия друг с другом и удержания вместе двух элементов (10 и 11), когда они не используются.
10. Устройство по п. 9, которое содержит средство для перевода указанного моторизованного элемента (10) в спящий режим, при этом указанное средство является герконовым переключателем (ILS), который меняет состояние, когда указанные два элемента (10) и (11) взаимодействуют за счет контакта указанных намагниченных частей.
11. Устройство по одному из пп. 1-10, в котором указанный моторизованный элемент (10) содержит модуль (51) контроля и управления, модуль (52) периферийных устройств и модуль зарядки, такой как батарея (53), при этом указанные три модуля соединены между собой.
12. Устройство по п. 11, в котором указанный модуль (51) контроля и управления содержит электронную плату, имеющую процессор, программу (55) контроля, память и средства управления модулем периферийных устройств, при этом указанная программа (55) контроля управляет запуском и остановкой двигателя, продолжительностью рабочих интервалов и их периодичностью в соответствии с заранее определенным циклом, записанным в указанной памяти указанного моторизованного элемента (10).
13. Устройство по п. 12, в котором указанный модуль (52) периферийных устройств содержит цепь передачи/приема радиочастотного сигнала (РЧ), такую как модуль Bluetooth (54), и датчик движения, выполненный с возможностью передачи в процессор информации, связанной с беспокойным поведением ребенка.
14. Устройство по п. 12 или 13, в котором указанный модуль (52) периферийных устройств содержит датчик давления, средства измерения уровня шума, температуры и влажности окружающей среды, динамик, светодиоды и средство для перевода указанного моторизованного элемента (10) в спящий режим.
15. Устройство по п. 12, в котором указанный модуль (54) Bluetooth моторизованного элемента (10) выполнен с возможностью устанавливать связь и обмениваться данными с цифровым терминалом (60) типа смартфона, при этом обмен данными разрешен и возможен, только когда указанные два элемента (10) и (11) входят в контакт, то есть когда указанное устройство находится в спящем режиме.
16. Устройство по п. 15, в котором указанный мобильный цифровой терминал (60) является смартфоном, при этом интерфейс или приложение (62), установленное на цифровом терминале, позволяет пользователю после использования указанного устройства контролировать данные, записанные во время его использования.
17. Устройство по п. 16, в котором данные указанного устройства сохраняются в базе (102) данных, доступной через средство (70) идентификации пользователя в Интернете, при этом указанная база (102) данных, доступная через Интернет, пополняется владельцами и пользователями заявленного устройства, которые используют интерфейс (62) на своем цифровом терминале, при этом указанная база данных используется анонимно для осуществления статистики, а также для разработки коллаборативной платформы.
18. Устройство по одному из пп. 12-17, в котором исполнение указанной программы контроля осуществляется автоматически после запуска устройства при помощи произвольного жеста пользователя в соответствии с циклом по умолчанию или в соответствии с циклом, адаптированным после нескольких использований к различным данным, зарегистрированным указанным датчиками, при этом указанные циклы записываются в памяти указанного моторизованного элемента.
19. Устройство по одному из пп. 11-18, в котором указанный вспомогательный элемент (11) содержит резервную батарею, которая подзаряжает указанную батарею (53), когда указанные два элемента (10) и (11) входят в контакт.
20. Устройство по одному из пп. 14-19, в котором включается звуковой или световой сигнал, когда ребенка вынимают из коляски.
| УСТРОЙСТВО, АКТИВИРУЕМОЕ ПРИ ПОМОЩИ ОТТЯГИВАЕМОГО ЯЗЫЧКА | 2006 |
|
RU2432307C2 |
| DE 102005004501 A, 10.08.2006 | |||
| Устройство для качания детских колясок | 1988 |
|
SU1794779A1 |

