Изобретение относится к раме детской коляски, а также к соответствующей детской коляске с моторизированной поддержкой.
Моторизованные детские коляски, как правило, известны. Они могут быть сконфигурированы таким образом, чтобы они могли перемещаться исключительно посредством мощности двигателя. Далее, как правило, известно оснащение детских колясок моторизированной поддержкой, которая оказывает поддержку тяге везущего детскую коляску лица, однако не оказывает поддержки, когда управляющее лицо не прилагает усилия.
Помимо этого, известно расположение двигателя на одной оси между двух колес детской коляски, причем двигатель приводит в движение оба сопряженных с осью колеса.
Известные концепции дают уже приемлемую поддержку для везущего детскую коляску лица. С другой стороны, такие концепции пока считаются сравнительно неудобными для пользователя или же сравнительно сложными.
Поэтому задачей изобретения является предложить простую в обращении, недорогую и прочную, оснащенную двигателем раму детской коляски, а также соответствующую детскую коляску, позволяющую везущему детскую коляску лицу, прежде всего, управлять детской коляской простым, удобным и интуитивным образом.
Эта задача решена посредством рамы детской коляски согласно п. 1 изобретения.
Прежде всего, задача решена посредством рамы детской коляски, содержащей по меньшей мере один двигатель, прежде всего электродвигатель, для приведения в движение рамы детской коляски, по меньшей мере один поручень для толкания рамы детской коляски и, предпочтительно, датчик, прежде всего датчик усилия. Предпочтительно, сенсорное устройство, прежде всего регистрирующее усилие сенсорное устройство, выполнено для регистрации усилия или компоненты усилия, прежде всего направления и/или величины усилия и/или компоненты усилия, которая действует на поручень, и/или для регистрации производной из этого усилия или же компоненты усилия величины, прежде всего изменения во времени усилия или же компоненты усилия.
Один аспект изобретения заключается в том, что предусмотрено регистрирующее усилие сенсорное устройство, регистрирующее или направление, или величину (или то и другое) усилия и/или компоненты усилия (или одного из этих усилий, или производного значения этого усилия или компоненты усилия). За счет этого обеспечивается, что может происходить соответствующее управление, базирующееся на выходном сигнале сенсорного устройства. Под выходным сигналом сенсорного устройства следует понимать, прежде всего, выдачу измеренного значения и/или выдачу среднего значения из нескольких измеренных значений.
Управление может тогда происходить внутри (посредством предусмотренного на раме детской коляски или в ней управляющего устройства) и/или снаружи посредством отдельного управляющего устройства (как, например, портативное устройство, прежде всего смартфон). При этом, прежде всего, важно, чтобы вообще могли генерироваться соответствующие данные касательно усилия или же взаимосвязанных с усилием значений. В этом отношении предпочтительно, однако не непременно необходимо, чтобы рама детской коляски (или соответствующая детская коляска) сама имела управляющее устройство.
В результате, предлагается удобная для пользователя и простая в изготовлении рама детской коляски с моторизированной поддержкой.
Под измерением величины следует понимать, прежде всего, измерение по меньшей мере одной конкретной величины (например, как конкретного значения ху ньютонов) или по меньшей мере измерение, имеет ли усилие/компонента усилия величину, лежащую выше (или же, при необходимости, на) или ниже (или же, при необходимости, на) порогового значения (пороговом значении).
Поручень выполнен, предпочтительно, монолитным (при необходимости, с взаимно подвижными отдельными частями). Поручень может иметь, прежде всего, горизонтальную рукоятку. В качестве альтернативы, поручень может также быть выполнен из нескольких частей (например, двух частей), например, с несколькими отделенными одна от другой рукоятками.
С помощью сенсорного устройства усилия обнаружимы, прежде всего, по меньшей мере два разных направления усилия (например, вперед и назад и/или вверх и вниз) и, при необходимости, определимы по величине, или обнаружимы по меньшей мере четыре направления (например, вперед, назад, вверх и вниз) и, при необходимости, определимы по величине. При необходимости, с помощью сенсорного устройства усилия могут регистрироваться по меньшей мере две разных величины (>0), предпочтительно по меньшей мере четыре разных величины, например непрерывное множество величин усилия (или же компоненты усилия, или же его производного значения). В любом случае посредством подобного сенсорного устройства усилия простым образом предоставляется информация, которая может быть удачно использована, чтобы управлять двигателем для приведения в движение детской коляски или же рамы детской коляски.
Согласно другому (факультативно независимому) аспекту изобретения предлагается рама детской коляски (при необходимости, вышеуказанного вида), причем для приведения в движение рамы детской коляски предусмотрено несколько двигателей, прежде всего электродвигателей. Предпочтительно, по меньшей мере два или именно два колеса (например, левое и правое колесо или же первое боковое колесо и второе боковое колесо) сопряжены соответственно с одном двигателем. Предпочтительно, может быть предусмотрено управляющее устройство для индивидуального управления двигателями. В качестве альтернативы, или дополнительно, может быть предусмотрено сенсорное устройство для регистрации толкающего усилия и/или перемещения рамы детской коляски. Посредством нескольких (прежде всего, по меньшей мере двух или именно двух) двигателей может улучшиться комфорт движения, прежде всего при движении на повороте, без необходимости принятия для этого затратных мер (как, например, в случае только одного двигателя с дифференциалом).
Если не указано иначе, под толканием или же толкающим усилием следует понимать, прежде всего, действия или же усилия, могущие быть направленными как вперед, так и назад (даже если в последнем случае можно говорить о тяге и тянущем усилии).
Поскольку (два) усилия сравниваются между собой и заявляется, что (оба) усилия равные или же разные, то это обычно следует понимать как сокращенное обозначение для "равных или же разных применительно к направлению и/или величине усилий", за исключением случаев, когда из контекста следует, что направление задано (как, например, при "направленном назад усилии"). Тогда указание должно относиться через равные или же разные усилия к величинам усилий.
По меньшей мере одно (измеряющее усилие) сенсорное устройство может быть расположено на поручне и/или в нем, прежде всего в рукоятке поручня, и/или в области крепления поручня и/или возле нее. Под областью крепления поручня следует понимать, прежде всего, область, в которой поручень прикреплен к корпусу рамы детской коляски. Под расположением возле области крепления поручня следует понимать, прежде всего, расположение на расстоянии менее 10 см, предпочтительно менее 5 см, относительно поручня (причем при относительно подвижном поручне здесь имеется в виду, прежде всего, минимальное расстояние).
Согласно следующему аспекту изобретения предлагается детская коляска, например спортивная детская коляска, багги или подобное транспортное средство для детей, имеющее раму детской коляски описанного выше (а также ниже) типа.
Согласно независимому аспекту изобретения предлагается способ управления рамой детской коляски, прежде всего, описанного выше (и ниже) типа, или детской коляской описанного выше (и ниже) типа, причем регистрируется направление и/или величина усилия и/или компоненты усилия, которая действует на поручень, и/или производная из этого усилия или же компоненты усилия, прежде всего изменение усилия или же компоненты усилия во времени.
Поскольку, помимо этого, выше и ниже описываются функциональные признаки рамы детской коляски или же детской коляски, их следует понимать таким образом, что может быть выполнена соответствующая технологическая операция. В этом отношении безусловно решающими являются не технологически соответствующие признаки устройства (как, например, датчик усилия), а технологические операции как таковые (то есть, например, регистрация направления и/или величины усилия). Разумеется, также в пределах способа могут присутствовать соответствующие признаки устройства (как, например, датчик усилия), как, помимо этого, описано выше и ниже.
Предпочтительно, предусмотрено по меньшей мере одно управляющее устройство, находящееся по меньшей мере с одним (измеряющим усилие) сенсорным устройством в функциональном соединении, прежде всего, таким образом, что выходной сигнал по меньшей мере одного сенсора используется для управления по меньшей мере одним двигателем. За счет этого может происходить простая и надежная регистрация усилия (или другого значения, как, например, фактического движения).
В одной форме выполнения выполнено по меньшей мере одно сенсорное устройство для регистрации действующих на поручень усилий и/или компонент усилий, и/или производной из них величины по меньшей мере в двух разных местах. Прежде всего, такая регистрация может происходить на первой (например, левой) и второй (например, правой) стороне поручня, прежде всего на первой (например, левой) и второй (например, правой) стороне рукоятки и/или на двух разных, прежде всего расположенных соответственно по бокам, рукоятках. Поскольку здесь и, помимо этого, речь идет о левой или правой стороне, то под этим имеется в виду левая или же правая сторона, которая следует из направления взгляда везущего раму детской коляски или же детскую коляску лица.
В конкретной форме выполнения выполнено сенсорное устройство, чтобы определять компоненты усилия по направлению движения и/или против направления движения (соответственно горизонтально) и/или вверх и/или вниз (соответственно вертикально). В качестве альтернативы, или дополнительно, могут определяться соответствующие компоненты производной по времени (или же изменения во времени).
Когда действующие усилия (и/или компоненты усилия и/или производные от усилия значения) регистрируются в нескольких разных местах, управляющее устройство может быть выполнено таким образом, что соответствующие ведущие колеса (или же, при необходимости, сопряженные двигатели) управляются, например, в зависимости от значения и длительности (прежде всего, горизонтальных) приложенных сил (и/или их изменения во времени) и/или в зависимости от того, указывают ли (прежде всего, горизонтальные) усилия (и/или их изменения во времени) в том же направлении. Ведущее колесо (или соответственно сопряженный двигатель) может управляться в зависимости от усилия, приложенного к его стороне (и/или изменения во времени этого усилия), и/или от усилия (и/или изменения во времени этого усилия), приложенного к другой (противоположной) стороне.
Управляющее устройство, предпочтительно, выполнено для управления и/или регулирования мощности по меньшей мере одного двигателя, прежде всего в зависимости от выходного сигнала по меньшей мере одного сенсорного устройства, например дискретными шагами и/или непрерывно.
Помимо этого, управляющее устройство может быть выполнено таким образом, что при превышении первого порога усилия и/или компоненты усилия, и/или их производного значения запускается по меньшей мере один двигатель. Под запуском двигателя следует, прежде всего, понимать, что двигатель подает мощность для приведения в движение рамы детской коляски. В этом смысле включение двигателя (который тогда, например, работает на холостом ходу), еще не является запуском. Под запуском, однако, при необходимости, может иметься в виду также первоначальное включение (электропитания) двигателя.
Управляющее устройство может быть выполнено таким образом, что при превышении второго порога усилия и/или компоненты усилия (например, компоненты вверх или вниз) и/или его производного значения по меньшей мере один двигатель останавливается или поддерживается на постоянной мощности. Под остановкой двигателя следует понимать, прежде всего, приведение двигателя в такое состояние, в котором он больше не приводит в движение детскую коляску. Двигатель может, при необходимости (например, на холостом ходу), продолжать работать. Однако может пониматься также окончательное выключение (например, прекращение подачи энергии для питания двигателя). Второй порог может быть по величине больше, чем первый порог.
Помимо этого, управляющее устройство может быть выполнено таким образом, что при превышении порога Fd действующего вниз усилия и/или при превышении порога Fu действующего вверх усилия, причем Fd и Fu, при необходимости, (по величине) равны или отличаются, и/или при превышении порога Ff2 действующего вперед усилия и/или при превышении порога Fr2 действующего назад усилия, причем Ff2 и Fr2 (по величине) равны или отличаются, по меньшей мере один двигатель останавливается или поддерживается на постоянной мощности, причем Ff2 и/или Fr2, предпочтительно, больше, прежде всего в 2 раза, или в 5 раз, или в 20 раз, чем F и/или Fd. Предпочтительно, управляющее устройство выполнено таким образом, что при снижении (в случае предыдущего превышения) ниже Ff2, Fr2, Fu или же Fd двигатель (снова) запускается.
Управляющая функция может быть выполнена, помимо этого, таким образом, что при превышении порога Ff1 действующего вперед усилия и/или при превышении порога Fr1 действующего назад усилия, причем Ff1 и Fr1 (по величине) равны или отличаются (и/или, при необходимости, при превышении порога действующего вниз усилия и/или при превышении порога действующего вверх усилия, причем порог действующего вниз усилия и порог действующего вверх усилия, при необходимости, равны или отличаются) по меньшей мере один двигатель запускается, причем, предпочтительно, Ff1 (по величине) меньше, чем Ff2 и/или, предпочтительно, Fr1 (по величине) меньше, чем Fr2.
В качестве альтернативы, или дополнительно, управляющее устройство может быть выполнено таким образом, что, когда (горизонтальное) усилие на одной из обеих сторон положительно, а (горизонтальное) усилие на другой стороне отрицательно (что может соответствовать вращению или же повороту детской коляски) и/или когда изменение во времени (горизонтального) усилия на одной стороне положительно, а изменение во времени (горизонтального) усилия на другой стороне отрицательно (что приводит к вращению или же повороту детской коляски), то ведущие колеса (или же соответственно сопряженные двигатели) управляются таким образом, что только одно из ведущих колес оказывает поддержку и/или так, что оказывающее поддержку усилие не превышает заданного значения или что поддержка обоих двигателей (полностью) останавливается или по меньшей мере заметно сокращается.
Рама детской коляски имеет по меньшей мере по меньшей мере один датчик скорости и/или по меньшей мере один датчик угла наклона. Датчик скорости выполнен, прежде всего, таким образом, что может определяться величина (и, при необходимости, направление) фактической скорости (рамы детской коляски относительно грунта). Датчик угла наклона, предпочтительно, выполнено таким образом, что может быть установлена кривизна вращения или же поворота (на пройденном рамой детской коляски пути). Управляющее устройство может тогда, при необходимости, быть выполнено таким образом, что поддержка соответствующего двигателя останавливается, когда превышается определенная скорость и/или определенная кривизна поворота. За счет этого улучшается, в целом, надежность и безопасность при обращении с детской коляской.
Управляющее устройство может быть выполнено таким образом, что соотношение толкающего усилия или (прежде всего горизонтальной) компоненты толкающего усилия и оказывающего поддержку усилия по меньшей мере одного двигателя, является постоянным, например 1, или больше 1, или больше 2, или больше 3, или меньше 1, или является переменным, например таким образом, что оказывающее поддержку усилие увеличивается более или менее линейно с толкающим усилием или (прежде всего горизонтальной) с компонентой толкающего усилия. Оказывающее поддержку усилие может, например, увеличиваться полиномиально, или экспоненциально, или логарифмически с толкающим усилием.
Помимо этого, управляющее устройство может быть выполнено таким образом, что соотношение изменения во времени толкающего усилия или изменения во времени (прежде всего горизонтальной) компоненты толкающего усилия и изменения во времени оказывающего поддержку усилия по меньшей мере одного двигателя, является постоянным, например 1 или больше 1, или больше 2, или больше 3, или меньше 1, или является переменным, например таким образом, что изменение во времени оказывающего поддержку усилия увеличивается более или менее линейно с изменением во времени толкающего усилия или компоненты толкающего усилия. Например, изменение во времени оказывающего поддержку усилия может увеличиваться полиномиально, или экспоненциально, или логарифмически и т.п. с изменением во времени толкающего усилия или с изменением во времени компоненты толкающего усилия.
Особо предпочтительно, оказывающее поддержку усилие (или же изменение во времени оказывающего поддержку усилия) увеличивается более чем (только) линейно с толкающим усилием или с компонентой толкающего усилия (или же с изменением во времени толкающего усилия или с изменением во времени компоненты толкающего усилия).
Описанные выше (и ниже) пороговые значения и границы могут иметь заданное постоянное значение или изменяться, например, посредством самообучающегося алгоритма.
Предпочтительно, управляющее устройство выполнено таким образом, что приводная мощность по меньшей мере одного двигателя понижается или отключается при приведении в действие тормоза, прежде всего тормоза для снижения скорости (рабочего тормоза) или стояночного тормоза.
Предпочтительно, поручень и/или участок поручня (прежде всего, тот участок поручня, который, по меньшей мере, частично имеет сенсорное устройство) на участке перемещения, предпочтительно свободно, прежде всего без необходимости производить деблокирование, подвижен, предпочтительно против возвращающего усилия.
Под перемещением в этом смысле следует понимать, прежде всего, не перемещение для (чистого) регулирования поручня по высоте, чтобы раму детской коляски согласовать с ростом везущего детскую коляску лица, а, прежде всего, (свободное) перемещение, которое может служить для измерения усилий и/или может служить как обратная связь для пользователя, что действует моторизованная поддержка. В этом отношении здесь может иметь место двойная обратная связь, с одной стороны посредством эффективной поддержки двигателя (которая должна быть обнаружена пользователем как таковая), и одновременно перемещение поручня (или же участка поручня). Следовательно, посредством одного и того же перемещения может реализовываться, прежде всего, измерение усилия и одновременно функция двойной обратной связи. Если сравнивать это, например, с пьезодатчиком (как сравнительно компактным сенсорным устройством), то в данном случае пользователю дается сравнительно хорошая обратная связь, что облегчает пользователю обращение с детской коляской (и пользователь вынужден не только обнаруживать моторизованную поддержку как таковую, которая, при необходимости, может быть сравнительно малой).
(Свободное) перемещение поручня (или же участка поручня) может составлять, например, по меньшей мере 2 мм, или по меньшей мере 10 мм, или по меньшей мере 20 мм. Если сравнивать подобное регистрирующее усилие сенсорное устройство, например, с простым пьезодатчиком, то достигается заметное улучшение, т.к. может предоставляться более точная информация. Пьезодатчик может обнаруживать только сравнительно малые относительные перемещения (намного меньше 1 мм).
В случае поступательного перемещения под этим имеется в виду, прежде всего, путь перемещения. В случае вращательного движения или же поворота под этим имеется в виду путь точки повернутого участка, совершающей наибольший путь из всех точек. В одной форме выполнения поручень или верхний участок поручня (например, рукоятка) может быть поворотным на участке крепления. В качестве альтернативы, (или дополнительно) участок (верхний) поручня может иметь возможность поступательного перемещения относительно нижнего участка. Помимо этого, весь поручень может иметь возможность (поступательного) перемещения.
По меньшей мере одно сенсорное устройство может быть выполнено для регистрации (во времени) характеристики усилия (или же компоненты усилия) и/или ее производных величин. За счет этого управление еще более улучшается. Например, тогда могут быть созданы условия для описания пороговых значений для усилий (или же компонент усилий) и/или их изменений во времени, а также пороговых значений для времени, причем пороговое значение для времени может быть длительностью (прилагаемого) усилия (или же компоненты усилия) и/или ее изменения во времени, за которое пороговое значение (пороговые значения) усилия (или же компоненты усилия) и/или его изменения во времени превышается (превышаются).
Под изменением во времени, как правило, можно понимать производную времени усилия (или же компоненты усилия) (в математическом смысле). Изменение во времени, однако, можно понимать также как ΔF/Δt (с конечным не бесконечно малым Δt в диапазоне, например от 100 миллисекунд до 1 секунды).
По меньшей мере одно управляющее устройство представляет собой регулировочное устройство, прежде всего регулировочное устройство для плавного (при необходимости, линейного) регулирования мощности по меньшей мере одного двигателя, предпочтительно пропорционально-интегрально-дифференциальное регулировочное устройство (где ПИД означает proportional integral derivative).
Предпочтительно, предусмотрено по меньшей мере одно тормозное устройство, прежде всего тормозное устройство для снижения скорости и/или стояночное тормозное устройство. Тормозное устройство для снижения скорости, предпочтительно, выполнено для использования кинетической энергии рамы детской коляски или же детской коляски (с ребенком) для притормаживания (и, прежде всего, для преобразования в электрическую энергию). В качестве альтернативы, или дополнительно, может быть предусмотрено управляющее устройство, выполненное таким образом, что стояночное тормозное устройство автоматически активируется через заданное время, предпочтительно от 3 секунд до 5 минут (предпочтительно от 10 секунд до 30 секунд), после (полной) остановки рамы детской коляски (после предыдущего перемещения). В качестве альтернативы, или дополнительно, может быть предусмотрено устройство, выполненное таким образом, что стояночное тормозное устройство автоматически активируется после достижения остановки или сравнительно малой скорости после предыдущей езды.
Тормозное устройство может, прежде всего, быть выполнено двухступенчатым, предпочтительно таким образом, что имеется как тормоз для снижения скорости (рабочий тормоз), так и стояночный тормоз для стопорения парковочного положения (когда детская коляска полностью остановлена). Тормоз для снижения скорости может быть выполнен таким образом, что детская коляска тормозится посредством трения (на одном колесе или нескольких (причем кинетическая энергия преобразовывается в тепло). Предпочтительно, однако, по меньшей мере один двигатель может использоваться как генератор, чтобы затормаживать детскую коляску (причем кинетическая энергия преобразовывается в электрическую энергию, которая, в свою очередь, может использоваться для зарядки одной или нескольких батарей). Для тормоза для снижения скорости может быть предусмотрено любое приводное устройство, например, приводимый в действие ладонью или пальцами рычаг (на поручне или же на рукоятке) или другое устройство (например, поворотная рукоятка или ножная педаль, или т.п.). При необходимости, также возможно, что графический пользовательский интерфейс (например, дисплей, прежде всего сенсорный экран) соединен с детской коляской и/или имеет приемник, чтобы иметь возможность соединения с внешним устройством (например, смартфоном с соответствующим приложением). Приводное устройство (или приемник) может быть соединено с тормозом для снижения скорости (посредством подходящих средств), чтобы тормоз для снижения скорости приводить в действие, то есть прилагать нужное пользователю тормозное усилие (которое может быть нулевым или больше нулевого, прежде всего, может принимать более 2 или более 5 разных значений больше нуля). Тормоз для снижения скорости может действовать до тех пор, пока приводное устройство приводится в действие, или пока детская коляска полностью останавливается и потом, при необходимости, действует стояночный тормоз.
Стояночный тормоз может быть выполнен как арретир, который препятствует, чтобы одно или несколько колес вращались. Например, стояночный тормоз может содержать штырь, взаимодействующий с принимающими полостями или приспособлениями с прорезями (например, пазами), предусмотренными в боковой поверхности колеса.
Стояночный тормоз, при необходимости, может (автоматически) активироваться непосредственно после того или спустя заданное время после того, как рама детской коляски или же детская коляска была остановлена.
Предпочтительно, по меньшей мере одно стояночное тормозное устройство выполнено с возможностью (только) электрического или электронного активирования и с возможностью (только) ручной разблокировки.
Стояночное тормозное устройство в разблокированном состоянии может быть предварительно напряжено, а в активированном состоянии не быть предварительно напряжено или быть (только) менее предварительно напряжено. Посредством такой меры безопасность при обращении улучшается.
Приведение в действие стояночного тормоза может производиться различным образом, например, посредством выключателя, например ползункового переключателя, или кнопочного выключателя, или ножной педали, или т.п.
Прежде всего, когда стояночный тормоз в активированном состоянии предварительно напряжен, разблокирование стояночного тормоза возможно (только) вручную, тогда как, при необходимости, активирование тормоза сделано возможным (только) электрически или электронно.
Может быть предусмотрено сенсорное устройство, прежде всего регистрирующее усилие сенсорное устройство, и управляющее устройство может быть выполнено таким образом, что по меньшей мере одно тормозное устройство, прежде всего тормозное устройство для снижения скорости и/или стояночное тормозное устройство, активируется, когда везущее детскую коляску лицо размыкает контакт, например посредством руки и рукоятки. Предпочтительно, тормоз для снижения скорости активируется с повышенным (максимальным) усилием и/или стояночный тормоз активируется, когда определяется, что везущее детскую коляску лицо (более) не имеет контакта с детской коляской, а детская коляска, тем не менее, движется.
В одной форме выполнения управляющее устройство выполнено таким образом, что тормозное устройство активируется, когда регистрирующее усилие сенсорное устройство регистрирует усилие, (по меньшей мере, частично) направленное против фактического направления перемещения рамы детской коляски. В качестве альтернативы, в таком случае может происходить моторизованная поддержка. Предпочтительно, двигатель в случае притормаживания используется как электрогенератор.
В формах выполнения тормозное устройство может активироваться для преобразования кинетической энергии рамы детской коляски в электрическую энергию при достижении заданной минимальной скорости. При этом, предпочтительно, рама детской коляски (таким образом) постоянно удерживается на заданной скорости. Прежде всего, когда двигатель согласно выполнению не имеет холостого хода, то тогда на высоких скоростях могут возникать высокие напряжения и повреждать электронику. Помимо этого, такой механизм может предотвращать нежелательное ускорение выше определенной скорости и, тем самым, улучшать безопасность.
Может быть предусмотрено по меньшей мере одно индикаторное или сигнальное устройство, указывающее пользователю рамы детской коляски, что присутствует или же может присутствовать моторизованная поддержка. При необходимости, первое индикаторное или сигнальное устройство может указывать на то, что фактически присутствует моторизованная поддержка, а второе индикаторное или сигнальное устройство может указывать на то, что моторизованная поддержка может присутствовать, в том смысле, что в зависимости от дальнейших параметров (например, максимальной скорости или т.п.) моторизованная поддержка или присутствует или (если параметры являются соответствующими) нет.
Предпочтительно, управляющее устройство детской коляски или же рамы детской коляски сконфигурировано таким образом, что двигатель является управляемым или же регулируемым в зависимости от вращения по меньшей мере одного колеса, предпочтительно заднего колеса. Прежде всего, управление, прежде всего регулирование, двигателя (оказывающего поддержку привода) детской коляски или же рамы детской коляски (дополнительно к прилагаемому к поручню усилию) может зависеть от того, вращаются (вращается) ли (задние) колеса (или же по меньшей мере одно (заднее) колесо). Предпочтительно, даже при прилагаемом усилии (или же при превышении порога усилия) поддержка происходить не должна, когда (задние) колеса не вращаются.
Предпочтительно, предусмотрено аналого-цифровое преобразующее устройство, которое сконфигурировано для оцифровки аналогового, зарегистрированного сенсорным устройством сигнала и которое, предпочтительно, расположено перед сенсорным устройством. Конкретно, (расположенное в поручне) сенсорное устройство может регистрировать аналоговый сигнал. Он может (при необходимости, непосредственно или же без промежуточно включенной дальнейшей обработки) после регистрации оцифровываться (аналого-цифровой преобразователь) и, предпочтительно, только потом передаваться на двигатель или же управляющее устройство для управления/регулирования двигателя. При этом, преимущественно, может учитываться, что посредством сенсорного устройства, при необходимости, генерируются лишь сравнительно небольшие разности потенциалов и цифровой сигнал менее подвержен помехам от воздействий окружающей среды (например, неопределенных переходных сопротивлениях между сенсорным устройством и двигателем). Конкретно, в поручне (прежде всего, рядом или в близком пространстве) возле сенсорных устройств может быть размещен микроконтроллер, выполняющий аналого-цифровое преобразование и посылающий, предпочтительно, цифровой сигнал, при необходимости с контрольной информацией, прежде всего с проверочными числами (или блоком проверочных чисел), на собственно контроллер(-ы) (управляющее(-ие) устройство(-а)) двигателя (при необходимости, нескольких двигателей) (например, на оси). Там может происходить контроль, прежде всего образовываться контрольная сумма, и сигнал продолжать обрабатываться и анализироваться для управления двигателями. За счет этого, при необходимости, содержащие ошибки пакеты данных могут отфильтровываться и не использоваться для управления (например, если были ошибки при передаче).
В формах выполнения управляющее устройство детской коляски или же рамы детской коляски может быть сконфигурировано таким образом, что на детской коляске включается взвешивающая функция, когда толкающее усилие не прилагается, или же превышается соответствующий порог усилия, или же когда детская коляска или же рама детской коляски (полностью) остановлена или превышает определенную скорость.
Когда поддержка (привода) не происходит, согласно выполнению может быть предусмотрено, что двигатель или же двигатели находятся на холостом ходу.
В результате, детская коляска или же рама детской коляски настоящего изобретения может создать условия для удобной поддержки при толкании (или же тяге) детской коляски. Прежде всего, возможно настроить значения Ff1 и/или Fr1, которые (по существу) определяют те усилия, которые должны (максимально) применяться пользователем (независимо от ситуации). Когда хотят начать перемещение детской коляски, стоящей неподвижно, то пользователь начнет ее толкать (или тянуть). Вследствие этого горизонтальная компонента толкающего усилия или же тянущего усилия становится больше нуля. К моменту времени, в который достигается Ff1, двигатель может начать оказывать поддержку пользователю (с минимальной мощностью). Когда, например, горизонтальная компонента толкающего или же тянущего усилия далее нарастает (то есть, ΔFinh/Δt>0), оказывающее поддержку усилие также будет нарастать (то есть, ΔFs/Δt>0). За счет этого горизонтальная компонента усилия может (по существу) поддерживаться постоянной на уровне Ff1 (по меньшей мере, когда не учитывают перерегулирование). Разумеется, когда присутствует условие для остановки поддержки двигателя, при необходимости, может требоваться повышенное усилие.
Fu может составлять от 0 до 25 Н, предпочтительно от 5 Н до 15 Н.
Fd может составлять от 10 Н до 50 Н, предпочтительно от 20 Н до 40 Н.
Ff1 может составлять от 0 до 25 Н, предпочтительно от 5 Н до 15 Н.
Ff1 может составлять от 0 до 25 Н, предпочтительно от 5 Н до 15 Н.
Ff2 и/или Fr2 может составлять от 25 Н до 500 Н, предпочтительно от 50 Н до 200 Н.
Ff1, Fr1, Ff2 и/или Fr2 могут, при необходимости, задаваться пользователем, например, через интерфейс, такой, как графический пользовательский интерфейс и/или смартфон (или же приложение смартфона). При необходимости, могут быть заданы минимальные и максимальные значения (оговоренные изготовителем), чтобы избежать проблем с безопасностью и/или чтобы продлить продолжительность эксплуатации аккумулятора.
Дальнейшие формы выполнения следуют из зависимых пунктов формулы.
Ниже изобретение описывается на основании варианта осуществления, который подробнее поясняется с помощью рисунков. При этом показано на:
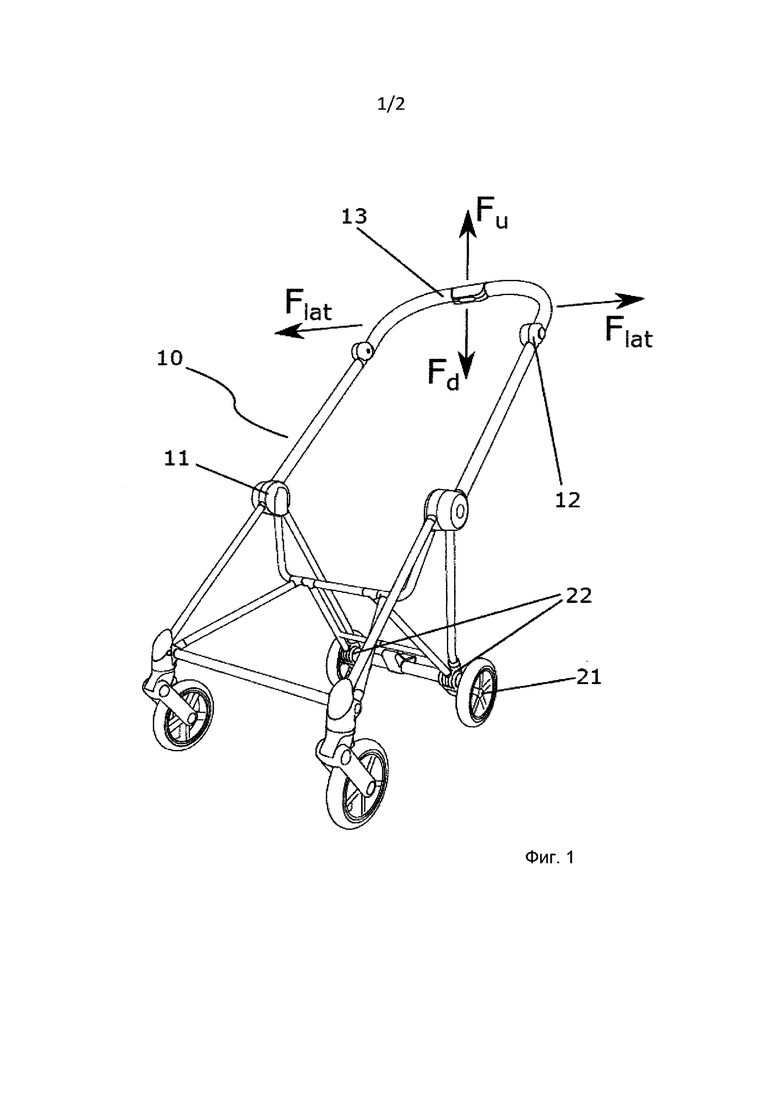
фиг. 1 - схематический вид под углом рамы детской коляски согласно изобретению,
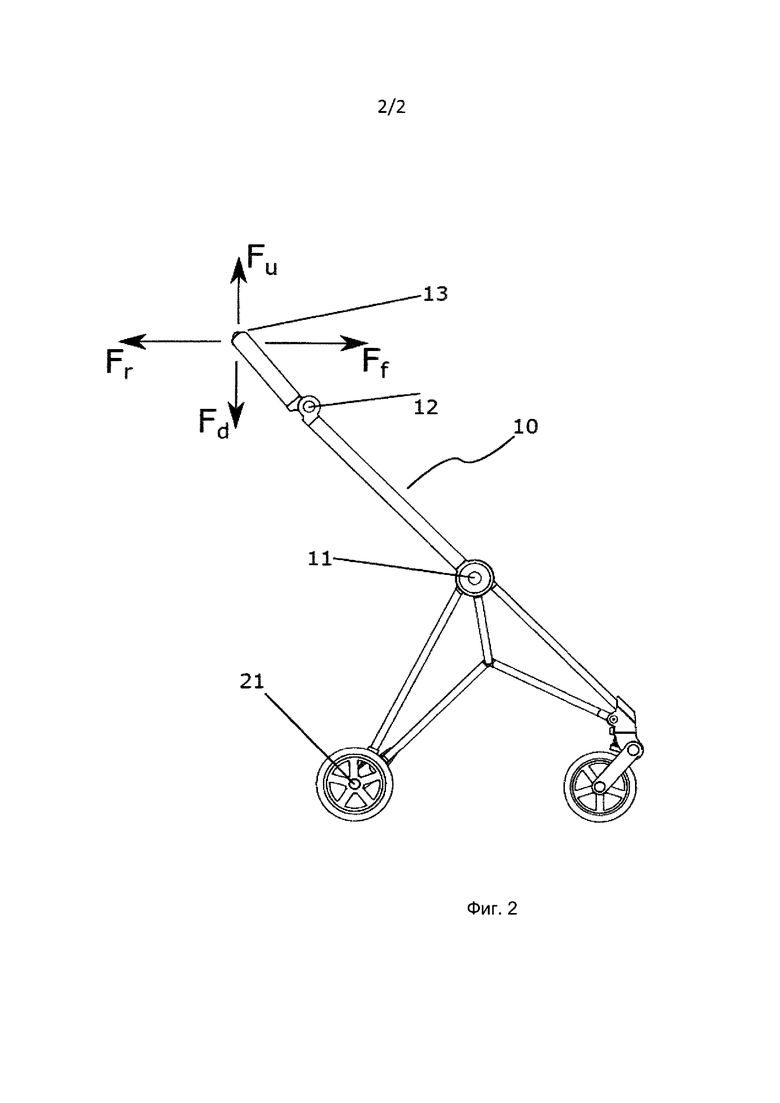
фиг. 2 - боковая проекция рамы детской коляски согласно фиг. 1.
В следующем описании для одинаковых и одинаково функционирующих частей применяются одинаковые ссылочные обозначения.
На фиг. 1 показана рама детской коляски согласно изобретению в схематическом виде под углом. Стрелка Fd обозначает приложенное к рукоятке 13 (горизонтальный участок поручня 10), направленное вниз усилие. Стрелка Fu обозначает приложенное к рукоятке 13 направленное вверх усилие. Стрелки Flat обозначают направленные в сторону усилия. Рукоятка 13 установлена относительно нижнего участка поручня 10 с возможностью поворота.
Конкретно, рукоятка 13 может поворачиваться в разные положения (и фиксироваться в них), чтобы выполнять регулирование по высоте рукоятки 13.
Между поворотной рукояткой 13 и нижним участком поручня 10 предусмотрено поворотное крепление 12 (с соответствующими шарнирами).
В свою очередь, (весь) поручень 10 установлен, предпочтительно, на поворотном креплении 11 на корпусе рамы детской коляски (прежде всего, для возможности складывания рамы детской коляски).
На поворотном креплении 11 и/или на поворотном креплении 12, предпочтительно, предусмотрено/предусмотрены сенсорное устройство/сенсорные устройства для регистрации действующего на рукоятку 13 усилия пользователя (прежде всего, Fu и Fd). Помимо этого, (см. фиг. 2) с помощью подобного сенсорного устройства или же подобных сенсорных устройств могут регистрироваться направленное вперед усилие Ff, а также направленное назад усилие Fr. В ступицах 21 колес могут, предпочтительно, (подробно не показаны) размещаться двигатели. В качестве альтернативы, двигатели могут размещаться на оси 22 (прежде всего, на участках оси, соседствующих со ступицей 21 колеса).
Здесь следует указать на то, что все описанные выше детали, рассматриваемые каждая в отдельности и в любом сочетании, прежде всего, показанные на чертежах подробности, являются существенными признаками изобретения. Их изменения понятны специалисту.
СПИСОК ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 поручень
11 поворотное крепление
12 поворотное крепление
13 рукоятка (горизонтальный участок поручня)
21 ступица колеса
22 ось
| название | год | авторы | номер документа |
|---|---|---|---|
| Складная реверсивная детская коляска | 2021 |
|
RU2764334C1 |
| ПРИСТАВКА ДЛЯ ДЕТСКОЙ КОЛЯСКИ И ТРАНСПОРТНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ДЕТСКУЮ КОЛЯСКУ И ТАКУЮ ПРИСТАВКУ | 2017 |
|
RU2729479C1 |
| КОЛЯСОЧНОЕ ПРИСТАВНОЕ УСТРОЙСТВО И УЗЕЛ СДВОЕННОЙ ДЕТСКОЙ КОЛЯСКИ | 2020 |
|
RU2788593C2 |
| ДЕТСКАЯ ПРОГУЛОЧНАЯ КОЛЯСКА | 2010 |
|
RU2519582C2 |
| ПРОГУЛОЧНАЯ ДЕТСКАЯ КОЛЯСКА | 2008 |
|
RU2471665C2 |
| ЛЕГКОВЕСНАЯ СКЛАДНАЯ ПРОГУЛОЧНАЯ ДЕТСКАЯ КОЛЯСКА | 2012 |
|
RU2599738C2 |
| ПРОГУЛОЧНАЯ ДЕТСКАЯ КОЛЯСКА | 2008 |
|
RU2475399C2 |
| СКЛАДНАЯ ДЕТСКАЯ КОЛЯСКА | 2008 |
|
RU2501698C2 |
| СКЛАДНАЯ ДЕТСКАЯ КОЛЯСКА | 2008 |
|
RU2448012C2 |
| ПРОГУЛОЧНАЯ ДЕТСКАЯ КОЛЯСКА | 2017 |
|
RU2707851C1 |
Группа изобретений относится к области машиностроения, в частности к складным рамам детской коляски. Рама, по первому варианту, содержит электродвигатель, поручень для толкания рамы, регистрирующее усилие сенсорное устройство для регистрации направления усилия, которое действует на поручень. Рама, по второму варианту, в которой для приведения в движение рамы предусмотрено несколько электродвигателей. Два колеса сопряжены соответственно с одним двигателем. Рама включает управляющее устройство для индивидуального управления двигателями. Детская коляска имеет складную раму детской коляски. Способ управления складной рамой детской коляски, в котором регистрируют направление и величину усилия и компоненты усилия, воздействующего на поручень. Регистрируют производное значение из этого усилия. Достигается упрощение конструкции. 4 н. и 20 з.п. ф-лы, 2 ил.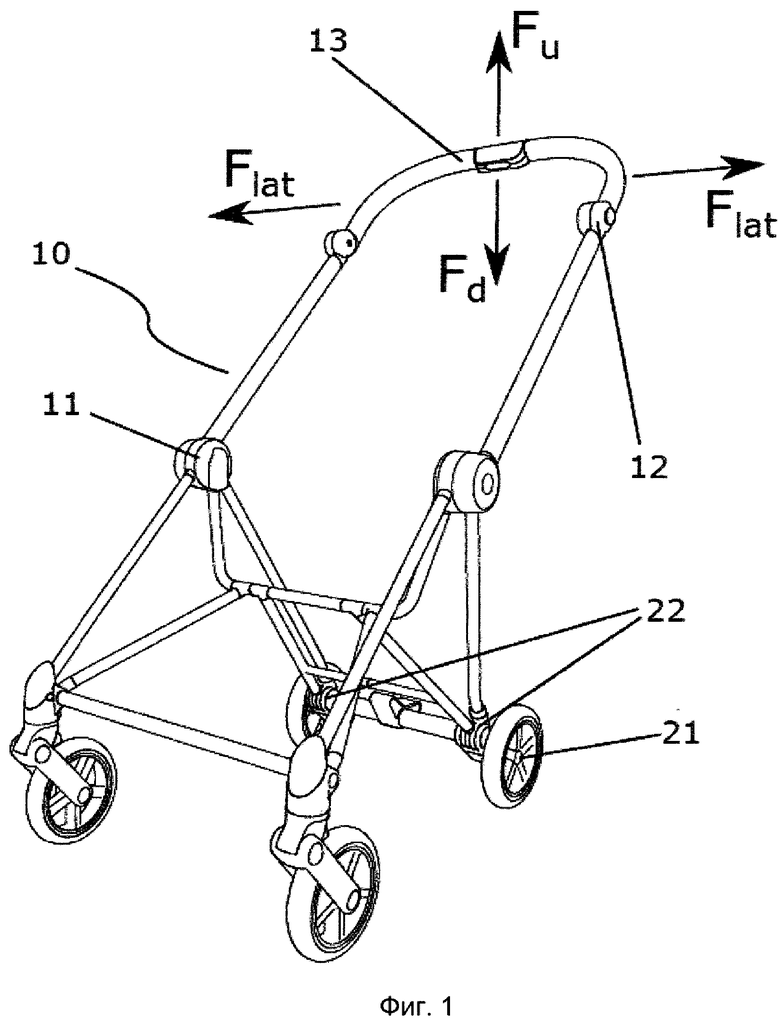
1. Складная рама детской коляски, содержащая:
по меньшей мере один двигатель, прежде всего электродвигатель, для оказывающего поддержку приведения в движение рамы детской коляски,
поручень (10) для толкания рамы детской коляски и по меньшей мере одно регистрирующее усилие сенсорное устройство для регистрации направления и/или величины усилия и/или компоненты усилия, которая действует на поручень (10), и/или для регистрации производной из этого усилия или же компоненты усилия величины, прежде всего изменения во времени усилия или же компоненты усилия.
2. Рама детской коляски по п. 1, отличающаяся тем, что по меньшей мере одно сенсорное устройство расположено на и/или в поручне (10), прежде всего рукоятке (12) поручня, и/или расположено в области крепления поручня и/или возле нее.
3. Рама детской коляски по п. 1 или 2, отличающаяся по меньшей мере одним управляющим устройством, которое находится по меньшей мере с одним сенсорным устройством в функциональном соединении, прежде всего таким образом, что выходной сигнал по меньшей мере одного сенсорного устройства используется для управления по меньшей мере одним двигателем.
4. Рама детской коляски по одному из предшествующих пунктов, отличающаяся тем, что по меньшей мере одно сенсорное устройство выполнено для регистрации действующих на поручень (10) усилий и/или компонент усилий и/или их производных величин по меньшей мере в двух разных местах, прежде всего на первой и второй стороне поручня (10), прежде всего на первой и второй стороне рукоятки (13) и/или на двух разных, прежде всего расположенных соответственно по бокам, рукоятках.
5. Рама детской коляски по одному из предшествующих пунктов, прежде всего по п. 4, отличающаяся тем, что сенсорное устройство (16) содержит по меньшей мере датчик крутящего момента и/или по меньшей мере два датчика.
6. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 3-5, отличающаяся тем, что управляющее устройство выполнено для управления и/или регулирования мощности по меньшей мере одного двигателя, прежде всего в зависимости от выходного сигнала по меньшей мере одного сенсорного устройства, например дискретными шагами и/или непрерывно, и/или выполнено таким образом, что при превышении первого порога усилия и/или компоненты усилия и/или их производного значения запускается по меньшей мере один двигатель, и/или выполнено таким образом, что при превышении второго порога усилия и/или компоненты усилия и/или их производного значения по меньшей мере один двигатель останавливается или поддерживается на постоянной мощности.
7. Рама детской коляски по одному из предшествующих пунктов, прежде всего по п. 6, отличающаяся тем, что управляющее устройство выполнено таким образом, что при превышении порога Fd действующего вниз усилия и/или при превышении порога Fu действующего вверх усилия, причем Fd и Fu, при необходимости, равны или отличаются, и/или при превышении порога Ff2 действующего вперед усилия и/или при превышении порога Fr2 действующего назад усилия, причем Ff2 и Fr2, при необходимости, равны или отличаются, по меньшей мере один двигатель останавливается или поддерживается на постоянной мощности,
причем Ff2 и/или Fr2, предпочтительно, больше, прежде всего, по меньшей мере в 2 раза, или в 5 раз, или в 20 раз, чем Fu и/или Fd, и/или причем при снижении ниже Ff2, Fr2, Fu и/или Fd в случае предыдущего превышения любого из этих порогов двигатель, предпочтительно, снова запускают, и/или причем управляющее устройство выполнено таким образом, что при превышении порога Ff1 действующего вперед усилия и/или при превышении порога Fr1 действующего назад усилия, причем Ff1 и Fr1, при необходимости, равны или отличаются, по меньшей мере один двигатель запускается, причем, предпочтительно, Ff1 по величине меньше, чем Ff2, и/или Fr1 по величине меньше, чем Fr2.
8. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 3-7, отличающаяся тем, что предусмотрен/предусмотрены по меньшей мере по меньшей мере один датчик скорости и/или по меньшей мере один датчик угла наклона.
9. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 3-8, отличающаяся тем, что управляющее устройство выполнено таким образом, что соотношение толкающего усилия или же тянущего усилия или, прежде всего горизонтальной, компоненты толкающего усилия или же компоненты тянущего усилия и оказывающего поддержку усилия по меньшей мере одного двигателя является постоянным, например 1 или больше 1, или меньше 1, или является переменным, например таким образом, что оказывающее поддержку усилие возрастает более или менее линейно с толкающим усилием или же с тянущим усилием или компонентой толкающего усилия, и/или причем управляющее устройство выполнено таким образом, что соотношение изменения во времени толкающего усилия или же тянущего усилия или изменения во времени, прежде всего горизонтальной, компоненты толкающего усилия или же тянущего усилия и изменения во времени оказывающего поддержку усилия по меньшей мере одного двигателя является постоянным, например 1 или больше 1, или меньше 1, или является переменным, например таким образом, что изменение во времени оказывающего поддержку усилия увеличивается более или менее линейно с изменением во времени толкающего усилия или же тянущего усилия или компоненты толкающего усилия или же компоненты тянущего усилия.
10. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 3-9, отличающаяся тем, что управляющее устройство выполнено таким образом, что приводная мощность по меньшей мере одного двигателя понижается или останавливается при приведении в действие тормоза, прежде всего тормоза для снижения скорости или стояночного тормоза.
11. Рама детской коляски по одному из предшествующих пунктов, отличающаяся тем, что поручень (10) и/или участок поручня (10), прежде всего участок поручня (10), по меньшей мере частично имеющий сенсорное устройство, выполнен с возможностью перемещения, прежде всего против возвращающего усилия, предпочтительно по пути по меньшей мере 2 мм, более предпочтительно по меньшей мере 10 мм.
12. Рама детской коляски по одному из предшествующих пунктов, отличающаяся тем, что по меньшей мере одно сенсорное устройство выполнено для регистрации характеристики усилия и/или компоненты усилия, и/или производной величины.
13. Рама детской коляски по одному из предшествующих пунктов, отличающаяся тем, что по меньшей мере одно управляющее устройство представляет собой регулировочное устройство, прежде всего регулировочное устройство для плавного, при необходимости линейного, регулирования мощности по меньшей мере одного двигателя, предпочтительно пропорционально-интегрально-дифференциальное регулировочное устройство.
14. Рама детской коляски по одному из предшествующих пунктов, отличающаяся тем, что предусмотрено/предусмотрены по меньшей мере одно тормозное устройство, прежде всего тормозное устройство для снижения скорости и/или стояночное тормозное устройство, причем тормозное устройство для снижения скорости, предпочтительно, выполнено для того, чтобы кинетическую энергию рамы детской коляски или же детской коляски использовать для притормаживания и, прежде всего, чтобы преобразовывать в электрическую энергию, и/или причем управляющее устройство выполнено таким образом, что стояночное тормозное устройство автоматически активируется через заданное время, предпочтительно от 3 секунд до 5 минут, после полной остановки рамы детской коляски, и/или причем управляющее устройство, предпочтительно, выполнено таким образом, что стояночное тормозное устройство автоматически активируется после достижения остановки или сравнительно малой скорости после предыдущей езды, и/или причем по меньшей мере одно по меньшей мере тормозное устройство активируется для преобразования кинетической энергии рамы детской коляски в электрическую энергию при достижении заданной минимальной скорости, причем, предпочтительно, рама детской коляски постоянно удерживается на заданной скорости.
15. Рама детской коляски по одному из предшествующих пунктов, прежде всего по п. 14, отличающаяся тем, что по меньшей мере одно стояночное тормозное устройство выполнено с возможностью электрического/электронного активирования и с возможностью ручного разблокирования, и/или в разблокированном состоянии является предварительно напряженным, а в активированном состоянии не является предварительно напряженным или является менее предварительно напряженным.
16. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 14-15, отличающаяся тем, что предусмотрено сенсорное устройство, прежде всего регистрирующее усилие сенсорное устройство, и управляющее устройство выполнено таким образом, что по меньшей мере одно тормозное устройство, прежде всего тормозное устройство для снижения скорости и/или стояночное тормозное устройство, активируется, когда везущее детскую коляску лицо размыкает контакт, например, посредством руки и рукоятки (13).
17. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 14-16, отличающаяся тем, что управляющее устройство выполнено таким образом, что тормозное устройство активируется, когда регистрирующее усилие сенсорное устройство регистрирует усилие, которое меньшей мере частично направлено против фактического направления перемещения рамы детской коляски.
18. Рама детской коляски по одному из предшествующих пунктов, отличающаяся тем, что предусмотрено по меньшей мере одно индикаторное или сигнальное устройство, указывающее пользователю рамы детской коляски, что присутствует или же может присутствовать моторизованная поддержка.
19. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 3-18, отличающаяся тем, что управляющее устройство сконфигурировано таким образом, что двигатель является управляемым или же регулируемым в зависимости от вращения по меньшей мере одного колеса.
20. Рама детской коляски по одному из предшествующих пунктов, прежде всего по одному из пп. 3-18, отличающаяся тем, что предусмотрено аналого-цифровое преобразующее устройство, которое сконфигурировано для оцифровки аналогового зарегистрированного сенсорным устройством сигнала и которое, предпочтительно, расположено перед сенсорным устройством.
21. Рама детской коляски по одному из предшествующих пунктов, причем для приведения в движение рамы детской коляски предусмотрено несколько двигателей, прежде всего электродвигателей, причем по меньшей мере два или именно два колеса, например левое и правое колеса, сопряжены соответственно с одним двигателем, причем, предпочтительно, предусмотрено/предусмотрены управляющее устройство для индивидуального управления двигателями и/или сенсорное устройство для регистрации толкающего усилия или же тянущего усилия и/или перемещения рамы детской коляски.
22. Складная рама детской коляски, причем для приведения в движение рамы детской коляски предусмотрено несколько двигателей, прежде всего электродвигателей, причем по меньшей мере два или именно два колеса, например левое и правое колеса, сопряжены соответственно с одним двигателем, причем, предпочтительно, предусмотрено/предусмотрены управляющее устройство для индивидуального управления двигателями и/или сенсорное устройство для регистрации толкающего усилия или же тянущего усилия и/или перемещения рамы детской коляски.
23. Детская коляска, например спортивная детская коляска или багги, которые имеют складную раму детской коляски по одному из предшествующих пунктов.
24. Способ управления складной рамой детской коляски, прежде всего по одному из пп. 1-22, или детской коляской, прежде всего по п. 23, причем регистрируют направление и/или величину усилия и/или компоненты усилия, воздействующего на поручень (10), и/или производное значение из этого усилия или компоненты усилия, прежде всего изменение во времени усилия или же компоненты усилия.
| УСТРОЙСТВО СВЯЗИ, ВКЛЮЧАЮЩЕЕ В СЕБЯ ОДНУ ИЛИ НЕСКОЛЬКО КНОПОК ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ, РАЗМЕЩЕННЫХ В ВЕРХНЕЙ КОРПУСНОЙ ЧАСТИ | 2005 |
|
RU2332806C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| Способ приготовления теста | 1979 |
|
SU867353A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Подшипник | 1947 |
|
SU70852A1 |

