Изобретение относится к средствам диагностики электрических машин, а именно к диагностике асинхронного электродвигателя и может быть использовано для контроля состояния его короткозамкнутой обмотки.
Известно устройство для диагностики состояния асинхронного электродвигателя [RU 2495444 C1, МПК G01R 31/00 (2006.01), опубл. 10.10.2013], содержащего датчики статорных фазных токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3), подключенные к фазам питания асинхронного двигателя. Выходы этих датчиков тока подключены к блоку вычисления результирующего модуля тока 4 (БРМТ), к которому последовательно подключены блок вейвлет преобразования 5 (БВП), блок интегральной оценки 6 (БИО) и блок сравнения 7 (БС), который связан с дисплеем или ЭВМ. Блок порогового значения 8 (БПЗ) соединен с блоком сравнения 7 (БС).
С помощью этого устройства предварительно фиксируют пороговое значение интегральной оценки асинхронного электродвигателя в безаварийном состоянии, для этого, используя мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы, определяют результирующий модуль вектора тока, который раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты. Используя высокочастотные вейвлет-коэффициенты, определяют интегральную оценку, на основе которой формируют допустимую зону работы электродвигателя в виде порогового значения. После этого снова регистрируют мгновенные значения фазных статорных токов асинхронного электродвигателя в установившемся режиме работы и определяют результирующий модуль вектора тока, который раскладывают на высокочастотные и низкочастотные вейвлет-коэффициенты. Используя высокочастотные вейвлет-коэффициенты, определяют интегральную оценку, по отклонению которой от допустимой зоны работы асинхронного электродвигателя судят о состоянии электродвигателя: если полученная интегральная оценка не входит в допустимую зону порогового значения, то делают вывод о неисправности асинхронного электродвигателя.
Однако это устройство может быть использовано только для анализа статических режимов работы асинхронного электродвигателя, что уменьшает область его применения.
Техническим результатом изобретения является создание устройства для диагностики состояния асинхронного двигателя.
Предложенное устройство для диагностики состояния асинхронного электродвигателя, так же как в прототипе, содержит три датчика статорных фазных токов, подключенных к фазам питания двигателя, выходы датчиков тока подключены к блоку вычисления результирующего модуля тока.
Согласно изобретению к блоку вычисления результирующего модуля тока подключены блок отстройки от переходного процесса и блок формирования задержки, которые соединены с блоком регрессионного анализа, к которому последовательно подключены блок памяти векторов состояния, блок определения геометрической разницы векторов заведомо исправного и исследуемого состояния асинхронного двигателя, блок выделения модуля вектора состояния, блок выделения диагностического признака и персональный компьютер, при этом блок памяти векторов состояния подключен к блоку выделения модуля вектора состояния.
С помощью предложенного устройства определяют диагностический признак, характеризующий наличие обрыва стержня ротора, который возрастает с повышением уровня повреждения. При наличии разницы векторов состояния, больше установленного значения увеличивается диагностический признак, указывая на наличие обрыва стержня.
Предложенное устройство может быть использовано не только для анализа статических режимов работы асинхронного электродвигателя, но и для диагностики внутренних повреждений в динамических режимах.
На фиг. 1 приведена схема устройства для диагностики состояния асинхронного электродвигателя.
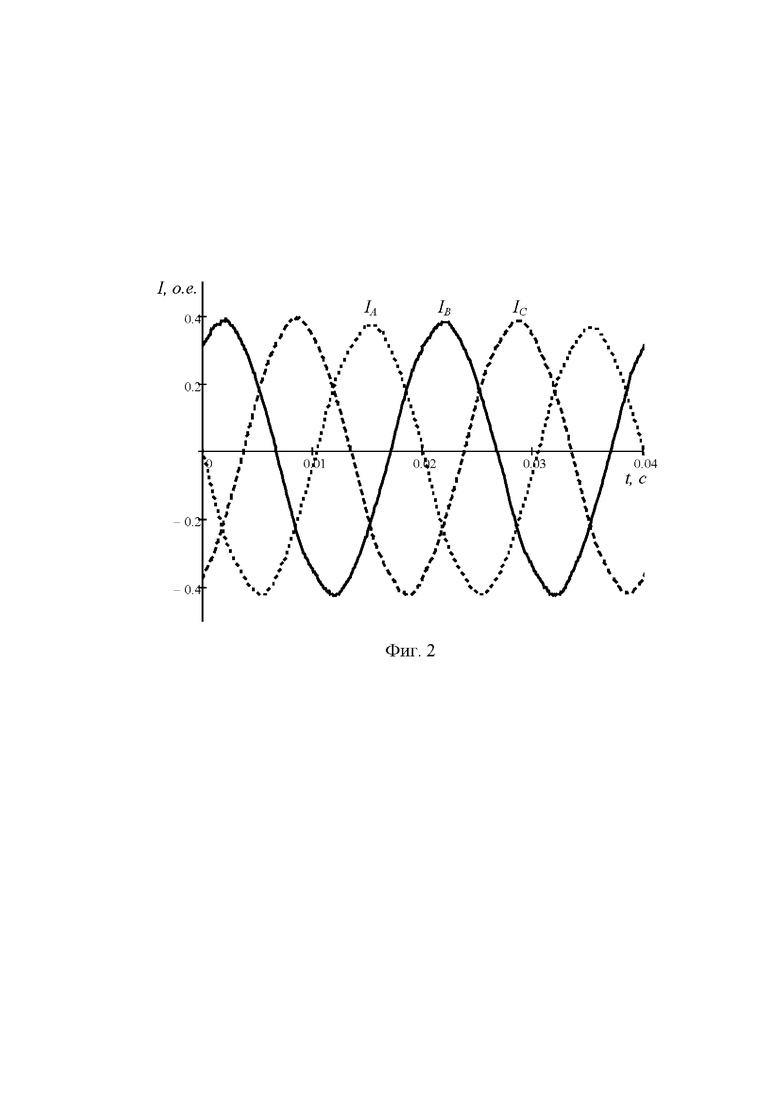
На фиг. 2 показаны осциллограммы тока каждой фазы при нормальном состоянии асинхронного электродвигателя.
На фиг. 3 показан результирующий модуль тока, полученный при нормальном состоянии асинхронного электродвигателя.
На фиг. 4 показана гистограмма влияния степени повреждения ротора асинхронного двигателя на диагностический признак.
На фиг. 5 показаны осциллограммы тока каждой фазы при аварийном состоянии асинхронного электродвигателя.
На фиг. 6 показан результирующий модуль тока, полученный при аварийном состоянии асинхронного электродвигателя.
Способ определения обрыва стержня ротора асинхронного электродвигателя осуществлен с помощью устройства (фиг. 1), содержащего датчики токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3), которые подключены к фазам питания асинхронного электродвигателя. Выходы датчиков токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3) подключены к блоку вычисления результирующего модуля тока 4 (БРМТ), к которому подключены блок отстройки от переходного процесса 5 (БОПП) и блок формирования задержки 6 (БФЗ), которые соединены с блоком регрессионного анализа 7 (БРА). К блоку регрессионного анализа 7 (БРА) последовательно подключены блок памяти векторов состояния 8 (БПВС), блок определения геометрической разницы векторов 9 (БОРВ), блок выделения модуля вектора состояния 10 (БВМВС), блок выделения диагностического признака 11 (БВДП) и персональный компьютер 12 (ПК). Блок памяти векторов состояния 8 (БПВС) подключен к блоку выделения модуля вектора состояния 10 (БВМВС).
В качестве датчика тока 1 (ДТ1), 2 (ДТ2), 3 (ДТ3) может быть использован промышленный прибор КЭИ-1.0. Блок вычисления результирующего модуля тока 4 (БРМТ), блок отстройки от переходного процесса 5 (БОПП), блок формирования задержки 6 (БФЗ), блок регрессионного анализа 7 (БРА), блок памяти векторов состояния 8 (БПВС), блок определения разницы векторов 9 (БОРВ), блок выделения модуля вектора состояния 10 (БВМВС), блок выделения диагностического признака 11 (БВДП), могут быть реализованы на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments.
Предварительно с помощью датчиков токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3), подключенных к асинхронному электродвигателю с короткозамкнутым ротором (тип АДМ100S4, мощность 3 кВт, число пар полюсов 

где I1M - модуль результирующего вектора токов статора;
I 1 A - мгновенное значение тока статора фазы «А»;
I 1 B - мгновенное значение тока статора фазы «B»;
I 1 C - мгновенное значение тока статора фазы «C»;
n - номер шага отсчета.
Сигнал, соответствующий модулю результирующего вектора тока, который одновременно поступает в блок отстройки от переходного процесса 5 (БОПП), где фиксируют установившийся режим работы двигателя, заключающийся в завершении переходных процессов в работе электродвигателя, и в блок формировании задержки 6 (БФЗ), где производят формирование задержки сигнала модуля результирующего вектора тока на n шагов.
Сформированный сигнал модуля результирующего вектора тока статора в установившемся режиме, поступает в блок регрессионного анализа 7 (БРА), где проводят цифровую обработку сигнала на основе линейной регрессии общего вида:

где  - функция, описывающая полученный сигнал;
- функция, описывающая полученный сигнал;
А, В - весовые коэффициенты при базисных функциях cos и sin;
f 0 - базовая частота;
k 0 , …, kp - параметр, определяющий количество используемых базисных функций от 1 до p;
n - номер отсчета.
Коэффициенты при базисных функциях A1, …, Ар и В1, …, Вр получают методом наименьших квадратов, исходя из критерия минимума суммы квадратов расстояний от каждой точки исходного сигнала до описываемой регрессионной модели по оси ординат. То есть удовлетворяется требование:

где N - количество отсчетов;
n - номер отсчета.
Таким образом, для определения начального исправного состояния, получают два вектора заведомо исправного состояния двигателя V(vA1, vB1, …, vAp, vBp) и V1(v1A1, v1B1, …, v1Ap, v1Bp) в разные временные интервалы. Полученные векторы передают в блок памяти векторов состояния 8 (БПВС).
Для нахождения диагностического признака, соответствующего заведомо исправному состоянию двигателя, используют два вектора коэффициентов заведомо исправного состояния V(vA1, vB1, …, vAp, vBp) и V1(v1A1, v1B1, …, v1Ap, v1Bp). Векторы, заведомо исправного состояния V(vA1, vB1, …, vAp, vBp) и V1(v1A1, v1B1, …, v1Ap, v1Bp) вычитают и получают вектор L = V(vA1, vB1, …, vAp, vBp) - V1(v1A1, v1B1, …, v1Ap, v1Bp) и передают в блок выделения модуля вектора состояния 10 (БВМВС), где определяют их модули |V| и |L|. Далее в блоке выделения диагностического признака 11 (БВДП) происходит выделение диагностического признака γуст путем определения отношения между модулем вектора |L| и модулем вектор заведомо исправного состояния |V|, где происходит выделение уставочного диагностического признака γуст с помощью формулы:
Результат передают в персональный компьютер 12 (ПК) и на основании полученного значения формируют максимально возможное отклонение в виде порогового значения допустимого повреждения, которое задано экспертом и зависит от особенностей асинхронного двигателя и используемой аппаратной части устройства для диагностики асинхронного электродвигателя. В данном случае, для конкретного асинхронного двигателя типа АДМ100S4 пороговое значение выбрано в два раза больше значения диагностического признака γуст при заведомо исправном двигателе и составляет 1,42% (фиг. 4).
Диагностику состояния асинхронного электродвигателя АДМ100S4 проводят, предварительно зафиксировав с датчиков токов 1 (ДТ1), 2 (ДТ2), 3 (ДТ3) мгновенные значения фазных статорных токов асинхронного электродвигателя (фиг. 5). Регистрацию мгновенных значений токов каждой фазы производят в установившемся режиме функционирования асинхронного электродвигателя в течение 100 мкс. На основе полученной информации о токах в блоке вычисления модуля результирующего вектора тока 4 (БРМТ) определяют результирующий модуль тока (фиг. 6). Определяют набор значений модуля результирующего вектора тока статорной цепи I1M(n) (1), который одновременно поступает в блок отстройки от переходного процесса 5 (БОПП), и в блок формировании задержки 6 (БФЗ), где производят формирование задержки сигнала модуля результирующего вектора тока на n шагов.
Сформированный сигнал модуля результирующего вектора тока статора в установившемся режиме, поступает в блок регрессионного анализа 7 (БРА), где проводят цифровую обработку сигнала на основе линейной регрессии общего вида (2).
Полученные методом наименьших квадратов коэффициенты A1, …, Ар и В1, …, Вр, представляют в виде координат вектора и получают вектор исследуемого (текущего) состояния двигателя U(uA1, uB1, …, uAp, uBp), который передают в блок памяти векторов состояния 8 (БПВС), в котором предварительно записан вектор заведомо исправного состояния двигателя V(vA1, vB1, …, vAp, vBp).
Сигналы, соответствующие вектору исследуемого (текущего) состояния двигателя U(uA1, uB1, …, uAp, uBp) и вектор заведомо исправного состояния двигателя V(vA1, vB1, …, vAp, vBp) передают в блок определения разницы векторов 9 (БОРВ), где определяют геометрическую разницу между ними. В результате из блока определения геометрической разницы векторов 9 (БОРВ) выделяют третий вектор-разницу
L1=V(vA1, vB1, …, vAp, vBp) - U(uA1, uB1, …, uAp, uBp).
Сигналы, соответствующие полученному вектору L1(vA1-uA1, vB1-uB1, …, vAp-uAp, vBp-uBp) и вектору исправного состояния V(vA1, vB1, …, vAp, vBp) поступают в блок выделения модуля вектора состояния 10 (БВМВС), где определяют их модули |V| и |L1|. Далее в блоке выделения диагностического признака 11 (БВДП) происходит выделение диагностического признака γ путем определения отношения между модулем вектора-разницы |L1| и модулем вектора исправного состояния |V|:

Результат передают в персональный компьютер 12 (ПК), который оповещает о наличии или отсутствии повреждения в роторе асинхронного двигателя путём сравнения значения диагностического признака γ с максимально допустимым отклонением в виде порогового значения допустимого повреждения, определенного ранее.
На фиг. 4 представлены результаты диагностики состояния асинхронного двигателя АДМ100S4, проведенной в заведомо исправном состоянии и с повреждением одного стержня ротора двигателя. Участок I на гистограмме со значением γуст=0,71% соответствует асинхронному двигателю без повреждений ротора, участок II со значением γ=4,3% - аварийному состоянию ротора с обрывом одного стержня, 1,42% - пороговое допустимое значение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2495444C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ ВРАЩАТЕЛЬНОГО ИЛИ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2011 |
|
RU2460190C1 |
| СПОСОБ УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 2007 |
|
RU2326480C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 2009 |
|
RU2410813C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2014 |
|
RU2576330C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ | 2006 |
|
RU2311721C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ ТРЕХФАЗНОГО ВЕНТИЛЬНОГО ДВИГАТЕЛЯ НА ОСНОВЕ ЯВНОПОЛЮСНОЙ СИНХРОННОЙ МАШИНЫ | 2010 |
|
RU2435291C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2552854C2 |





Изобретение относится к средствам диагностики электрических машин, а именно к диагностике асинхронного электродвигателя, и может быть использовано для контроля состояния его короткозамкнутой обмотки. Сущность: устройство для диагностики состояния асинхронного электродвигателя содержит три датчика статорных фазных токов, подключенных к фазам питания двигателя. Выходы датчиков тока подключены к блоку вычисления результирующего модуля тока (БРМТ). К БРМТ подключены блок отстройки от переходного процесса и блок формирования задержки, которые соединены с блоком регрессионного анализа (БРА). К БРА последовательно подключены блок памяти векторов состояния, блок определения геометрической разницы векторов заведомо исправного и исследуемого состояния асинхронного двигателя, блок выделения модуля вектора состояния, блок выделения диагностического признака и персональный компьютер. Блок памяти векторов состояния подключен к блоку выделения модуля вектора состояния. Технический результат: расширение арсенала технических средств диагностики состояния асинхронного электродвигателя. 6 ил.
Устройство для диагностики состояния асинхронного электродвигателя, содержащее три датчика статорных фазных токов, подключенных к фазам питания двигателя, выходы датчиков тока подключены к блоку вычисления результирующего модуля тока, отличающееся тем, что к блоку вычисления результирующего модуля тока подключены блок отстройки от переходного процесса и блок формирования задержки, которые соединены с блоком регрессионного анализа, к которому последовательно подключены блок памяти векторов состояния, блок определения геометрической разницы векторов заведомо исправного и исследуемого состояния асинхронного двигателя, блок выделения модуля вектора состояния, блок выделения диагностического признака и персональный компьютер, при этом блок памяти векторов состояния подключен к блоку выделения модуля вектора состояния.
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2495444C1 |
| RU 181087 U1, 04.07.2018 | |||
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2552854C2 |
| CN 107091985 A, 25.08.2017 | |||
| CN 104569819 B, 16.06.2017 | |||
| CN 107091985 A, 25.08.2017 | |||
| CN 109031118 A, 18.12.2018. | |||

