Изобретение относится к авиационной технике, в частности к беспилотным летательным аппаратам аэродинамического типа со специальной полезной нагрузкой.
Летательный аппарат (далее - ЛА) может быть использован как для транспортировки различных грузов, так и для автоматизированной перевозки пассажиров и грузов в условиях городской застройки с выполнением вертикального взлета и посадки на ограниченные взлетно-посадочные площадки.
Известны различные беспилотные летательные аппараты различных возможностей.
Известен беспилотный летательный аппарат вертикального взлета и посадки [заявка на патент США №7857256 В2 от 28.12.2010 публ.], включающий в себя корпус выпуклой формы, вентилятор, размещенный в верхней части корпуса, имеющий кольцевой канал со спрямляющим аппаратом, элементы управления.
Беспилотный летательный аппарат вертикального взлета и посадки имеет невысокую аэродинамическую эффективность, а наличие малого числа элементов управления не обеспечивает достаточную маневренность.
Известен беспилотный летательный аппарат, который выполнен с возможностью нахождения в двух состояниях: в положении, соответствующем полетному, и в состоянии для транспортирования и хранения;, описанный в патенте [Пат. RU 2334651 С1, МПК7 В64С 1/30, В64С 3/56. Малоразмерный беспилотный летательный аппарат (варианты), заявл. 2006.12.26, опубл. 2008.09.27]. Указанный беспилотный летательный аппарат имеет фюзеляж, крыло и хвостовое оперение. Фюзеляж аппарата выполнен в виде носовой части и хвостовой балки. Хвостовое оперение выполнено в виде V-образного стабилизатора. БПЛА не имеет шасси для взлета и посадки,
Известен беспилотный летательный аппарат вертикального взлета и посадки включает корпус, выполненный в виде сжатого десятиугольника в плане, силовой элемент, размещенный в центре корпуса, на верхней части которого расположены два вентилятора, при чем расстояние между их осями вращения составляет не менее суммы двух радиусов вращения, интегрированный обтекатель с кольцевыми каналами. Корпус и интегрированный обтекатель могут быть выполнены из вспененной пластмассы. Элементы управления расположены по всей внешней нижней боковой поверхности, (патент РФ №2511735, опубл. 10.04.2014).
Известные решения не позволяют как транспортировку различных грузов, так и автоматизированную перевозку пассажиров и грузов в условиях городской застройки с выполнением вертикального взлета и посадки на ограниченные взлетно-посадочные площадки.
В основу изобретения положена задача создания беспилотного летательного аппарата, который может быть использован как для транспортировки различных грузов, так и для автоматизированной перевозки пассажиров и грузов в условиях городской застройки с выполнением вертикального взлета и посадки на ограниченные взлетно-посадочные площадки.
Техническим результатом является повышение аэродинамической эффективности, уменьшение габаритов и возможность транспортировки в сложенном виде.
Поставленная задача и технический результат достигается тем, что Беспилотный летательный аппарат содержит планер, отличающийся тем, что содержит центроплан, фюзеляж, складывающееся крыло и оперение, имеющие отъемную часть, вертикальное и горизонтальное оперение, отклоняемые ВМУ (винто-моторная установка) и неподвижные ВМУ на балке выноса, снабжен шасси передней и основной опоры, и устройство управления на основе данных инерциальных датчиков пространственного положения обеспечивает автоматическую стабилизацию аппарата в горизонтальном положении в том числе на режиме висения, при этом инерциальные датчики непрерывно корректируются по данным ГНСС.
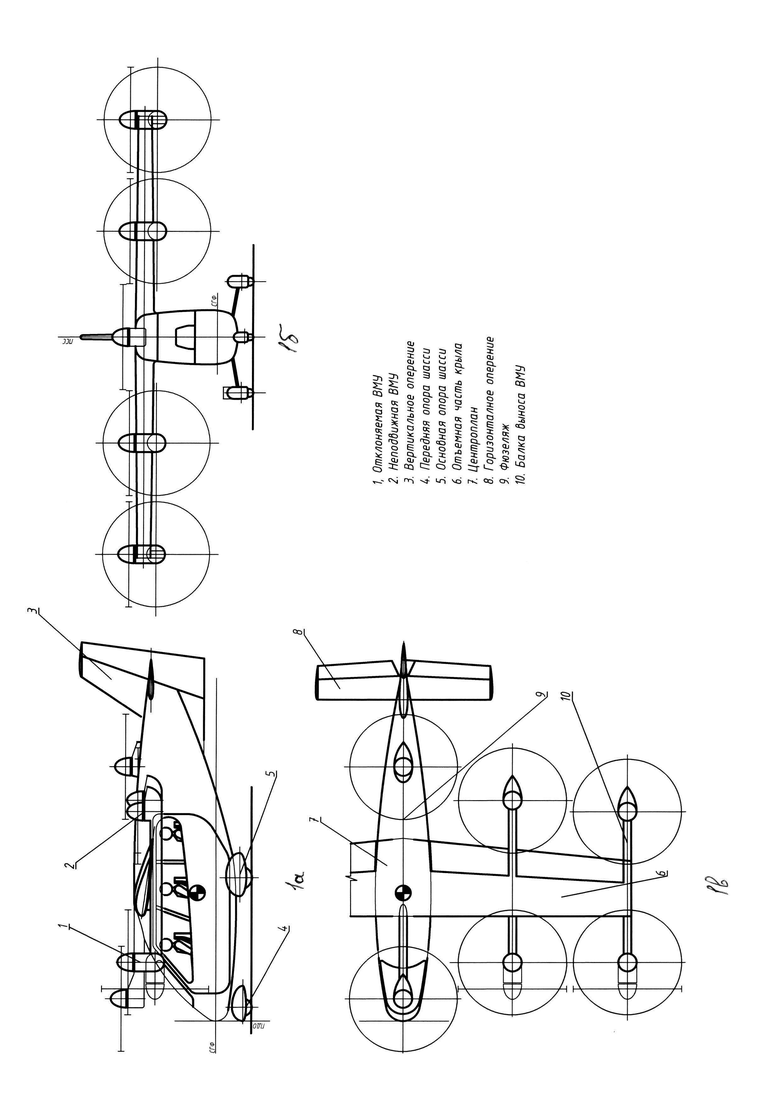
Устройство полезной модели поясняется чертежами на фиг. 1.
На фиг. 1а представлен БЛА (вид сбоку).
На фиг. 1б представлен БЛА (вид спереди).
На фиг. 1в показан БЛА в плане.
Беспилотный летательный аппарат устроен следующим образом.
Беспилотный летательный аппарат содержит планер, включающий центроплан 7, фюзеляж 9, складывающееся крыло и оперение, и имеет вертикальное оперение 3 и горизонтальное оперение 8, отклоняемые ВМУ 1 и неподвижные ВМУ 2 на балке выноса 10. Крыло содержит отъемную часть 6. БПЛА снабжен шасси передней опоры шасси 4 и основной опоры шасси 5.Крыло БЛА содержит соединенный с фюзеляжем 9 центроплан 7 и отъемные части 6, соединенные с центропланом посредством разъемного соединения.
Внутри корпуса носовой части фюзеляжа размещены силовая установка, аккумуляторные отсеки, система управления и бортовое оборудование, предназначенное для управления от дистанционного пункта и для навигации в автономном полете, а также отсек для полезной нагрузки. Силовая установка выполнена в виде двигателя с выходным валом и закрепленным на выходном валу двухлопастным винтом.
Аэродинамическая схема ЛА представляет собой моноплан с крылом размахом 6,1 м площадью 7,2 м2. На концах крыла расположены 2 электрические силовые установки (СУ) с винтами (Винтомоторные группы) с 2-х лопастными винтами диаметром 1,7 м. По обеим сторонам крыла на балках расположены еще 8 аналогичных СУ.
Четыре передние СУ для перехода в горизонтальный полет поворачиваются и создают пропульсивную тягу. На данных СУ предусмотрено изменение угла установки лопастей для повышения КПД в горизонтальном полете, а также полужесткая (или на кардане) подвеска лопастей для снижения нагрузок при косом обтекании. На остальных СУ винты фиксированного шага, при горизонтальном полете они останавливаются и располагаются вдоль по полету.
Крыло и горизонтальное оперение имеют отклоняемые поверхности (флапероны на крыле, рули высоты на ГО). При вертикальном взлете для снижения потерь тяги вышеуказанные поверхности отклоняются на 70°. Вертикальное оперение обычного типа.
Для снижения массы крыла в нем расположена основная масса аккумуляторных батарей.
В качестве нагрузки БПЛА может нести различные грузы. В условиях города
БПЛА может быть укомплектован тремя пассажирскими креслами с отдельными входами. Длина салона позволяет расположить 1 лежачего больного и сопровождающего.
Транспортировка ЛА в месту возможного размещения и взлета осуществляется в 20-футовом контейнере.
В горизонтальном полете ЛА управляется как обычный самолет.
Условия полета и управления:
Основной режим полета - беспилотный, автоматический.
Реализована активная система уклонения от неподвижных и подвижных препятствий по типу «вижу-избегаю».
В качестве источника навигационных данных использоватся глобальные навигационные спутниковые системы (ГНСС) GPS либо ГЛОНАС в дифференциальном режиме с применением наземных опорных станций с контролем целостности данных RIAM.
В случае прекращения приема либо нарушения целостности данных ГНСС, система управления должна функционировать в инерциальном режиме в интервале времени достаточном для ожидания восстановления потока данных и аварийной посадки.
БПЛА управляется системой на основе данных инерциальных датчиков. Система управления на основе данных инерциальных датчиков пространственного положения обеспечивает автоматическую стабилизацию летательного аппарата в горизонтальном положении в том числе на режиме висения. Инерциальные датчики непрерывно корректируются по данным ГНСС.
С целью обеспечения минимальной взлетной скорости и сокращения габаритов в сложенном состоянии, выбрана нормальная схема ЛА - низкоплан с трапециевидным крылом малого удлинения (около 2,0), с мощной механизацией (щелевой закрылок, флаперон, поворотный носок). Сужение крыла (3,0) выбиралось из учета минимального индуктивного сопротивления. Стреловидность передней кромки крыла 45° принята из учета необходимости достижения околозвуковых и небольших сверхзвуковых скоростей. Профиль крыла относительно толстый (10%), как компромисс между потребным максимально высоким взлетным Су и минимальным сопротивлением при сверхзвуке. Крыло 2-х лонжеронное (примерно на 17% и 60% САХ). В кессоне крыла находятся аккумуляторные отсеки суммарным объемом 1360 л. Такая конструкция позволяет максимально повысить аэродинамическую эффективность, благодаря наилучшему созданию аэродинамической подъемной силы, также обеспечивает высокую маневренность.
Для размещения необходимых площадей ВО и ГО в сложенном состоянии и обеспечения их эффективной работы, хвостовое оперение выполнено со стабилизатором руля высоты и рулем направления. Возможно использование данного оперения для управления по крену (параллельно с флаперонами).
Привод уборки-выпуска шасси, механизации крыла и оперения - электрогидравлический.
В связи с особенностями обтекания крыла малого удлинения и применением поворотного носка, конструктивно угол тангажа ЛА при взлете/посадке увеличен по сравнению с обычным крылом и достигает 20°.
Летательный аппарат может быть использован как для транспортировки различных грузов, так и для автоматизированной перевозки пассажиров и грузов в условиях городской застройки с выполнением вертикального взлета и посадки на ограниченные взлетно-посадочные площадки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный летательный аппарат вертикального взлета и посадки | 2021 |
|
RU2767390C1 |
| Малоразмерный беспилотный летательный аппарат | 2023 |
|
RU2812634C1 |
| Высокоскоростной беспилотный летательный аппарат | 2021 |
|
RU2787906C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| БЕСПИЛОТНЫЙ УНИВЕРСАЛЬНЫЙ САМОЛЕТ ВЕРТИКАЛЬНОГО ИЛИ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2604755C1 |
| БЕСПИЛОТНЫЙ САМОЛЕТ (ВАРИАНТЫ) | 2015 |
|
RU2613629C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2002 |
|
RU2213024C1 |
| САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2604951C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки | 2023 |
|
RU2805891C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2507122C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Беспилотный летательный аппарат содержит центроплан, фюзеляж, складывающееся крыло и оперение, имеющие отъемную часть, вертикальное и горизонтальное оперение, отклоняемые ВМУ и неподвижные ВМУ на балке выноса, снабжен шасси передней и основной опоры и устройство управления на основе данных инерциальных датчиков пространственного положения, обеспечивающее автоматическую стабилизацию аппарата в горизонтальном положении в том числе на режиме висения, при этом инерциальные датчики непрерывно корректируются по данным ГНСС. Обеспечивается повышение аэродинамической эффективности, уменьшение габаритов и возможность транспортировки беспилотного летательного аппарата в сложенном виде. 3 ил.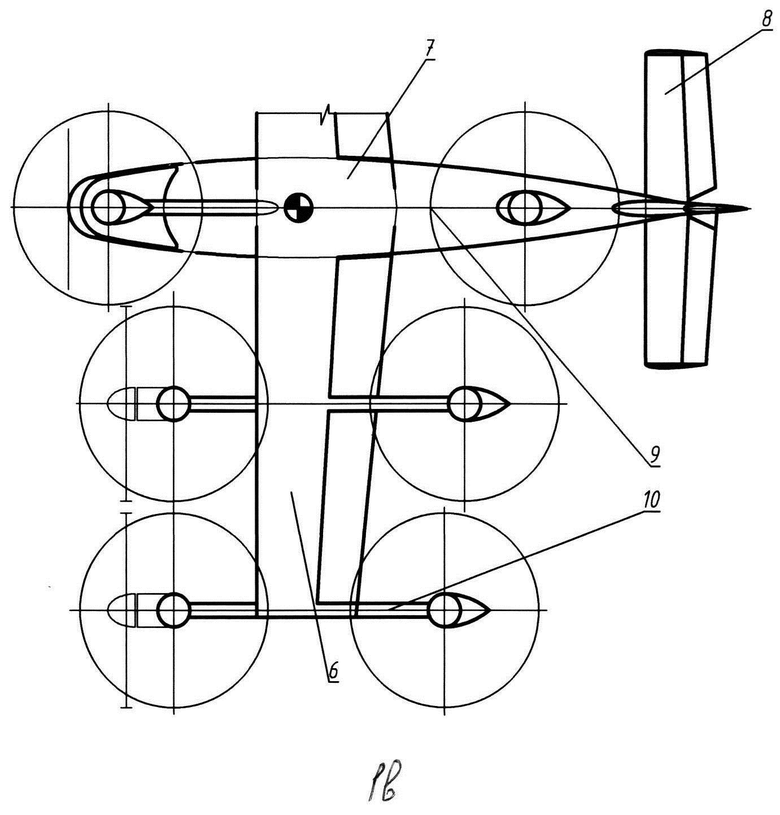
Беспилотный летательный аппарат содержит планер, отличающийся тем, что содержит центроплан, фюзеляж, складывающееся крыло и оперение, имеющие отъемную часть, вертикальное и горизонтальное оперение, отклоняемые ВМУ и неподвижные ВМУ на балке выноса, снабжен шасси передней и основной опоры и устройство управления на основе данных инерциальных датчиков пространственного положения, обеспечивающее автоматическую стабилизацию аппарата в горизонтальном положении, в том числе на режиме висения, при этом инерциальные датчики непрерывно корректируются по данным ГНСС.
| ПАТСНТИО «А'" | 0 |
|
SU181026A1 |
| Безбалластный путь на искусственном сооружении | 2017 |
|
RU2669195C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| МУЛЬТИКОПТЕР С ВОЗДУШНЫМИ ВИНТАМИ РАЗЛИЧНОГО НАЗНАЧЕНИЯ | 2016 |
|
RU2718460C1 |
| CN 109263934 A, 25.01.2019 | |||
| US 20190291860 A1, 26.09.2019 | |||
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| ИНСТРУМЕНТ ДЛЯ УЛЬТРАЗВУКОВОГО ВЫРЕЗАНИЯ НЕСКОЛЬКИХ ЗАГОТОВОК ИЗ ТВЕРДЫХ И ХРУПКИХМАТЕРИАЛОВ | 0 |
|
SU180474A1 |
| EP 3418186 A1, 26.12.2018. | |||

