Изобретение относится к железнодорожному рельсовому транспорту, а именно к прожекторным устройствам, специально приспособленным для наружных частей транспортных средств, и может быть использовано для головного освещения подвижного состава в темное время суток, особенно в кривых участках пути.
Известен прожектор рельсового подвижного состава (Патент RU 2038530 С1, МПК F21M 3/08, опубл. 27.06.1995), выбранный в качестве прототипа заявляемого изобретения. Устройство характеризуется тем, что прожектор содержит в передней лобовой части кузова источник света с рефлектором. Кузов жестко сочленен с несущей рамой, установленной на тележках и шарнирно зафиксированной с помощью центрального шкворня. Источник света с рефлектором жестко установлен в поворотной скобе, содержащей верхнюю и нижнюю полуоси, образующие поворотную ось прожектора. При выходе состава на криволинейный участок пути передняя тележка под воздействием кривизны рельсов пути поворачивается на угол β. При этом центральный шкворень также поворачивается на угол β и через кинематическую связь осуществляется поворот скобы с источником света и рефлектором вокруг вертикальной оси в горизонтальной плоскости.
Недостатками известного прожектора рельсового подвижного состава является сложность, а зачастую и полная невозможность модернизации действующего подвижного состава для его установки, наличие множества кинематических связей, снижающих общую надежность узла.
Технической задачей заявляемого изобретения является создание способа и системы коррекции направления светового потока прожектора рельсового подвижного состава без использования кинематических связей между элементами конструкции прожектора и тележкой.
Технический результат - повышение безопасности движения поездов в темное время суток, снижение количества аварий на перегонах, повышение надежности перевозочного процесса.
Опыт работы железнодорожного транспорта показывает, что в ночное время, при движении в кривых, стандартным прожектором подвижного состава не обеспечено должное освещение пути и контактного провода. Известно, что кривые участки пути составляют значительную долю общей протяженности железных дорог, радиус кривых варьируется от 300 до 4000 метров, при этом, чем меньше радиус кривой, тем хуже кривая освещена.
В настоящее время, в условиях постоянно возрастающих скоростей следования поездов, особенно актуальны исследования в области повышения безопасности движения. Например, на участках железных дорог с частыми кривыми малого радиуса, возникают ситуации, когда при проследовании кривой машинист движется «вслепую», так как луч прожектора направлен в сторону от кривой.
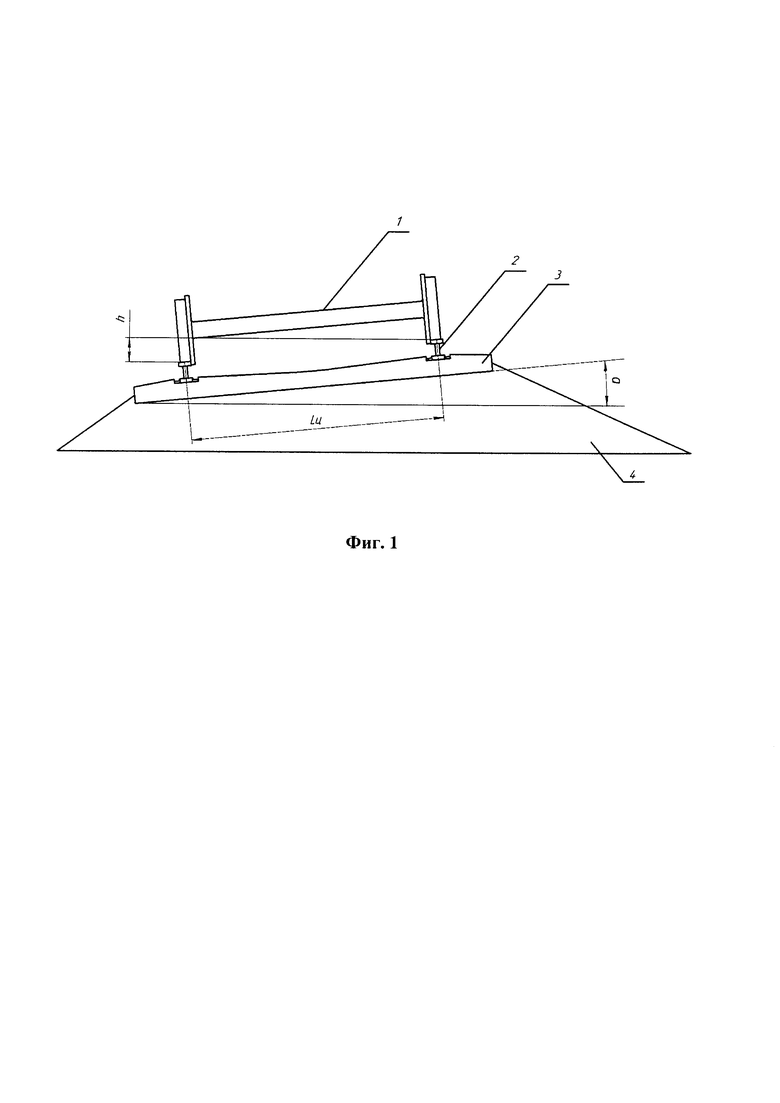
На фиг. 1 представлена общая схема положения экипажной части подвижного состава при прохождении кривой, где присутствует возвышение наружного рельса над внутренним.
На фиг. 1 отображены: колесная пара 1, рельс 2, шпала 3, балластный слой 4, h - возвышение наружного рельса над внутренним, Lц - расстояние между центрами рельсов, α - угол наклона экипажной части.
Известно, что в кривых участках пути для гашения поперечного ускорения применено возвышение наружного рельса над внутренним. Возвышение наружного рельса определяется математическим выражением (см. например, СП 237.1326000.2015. Инфраструктура железнодорожного транспорта. Общие требования, с. 32, математическое выражение 6):

где:
k - коэффициент увеличения возвышения наружного рельса, учитывающий смещение центра тяжести экипажа в наружную сторону по отношению к оси кривой, принимается равным 1,0 при скоростях движения до 140 км/ч включительно и 1,2 при скоростях более 140 км/ч;
νcp - средневзвешенная квадратическая скорость, км/ч;
R - радиус кривой, м.
Из математического выражения (1) радиус кривой определен математическим выражением:

Число 12,5 в математических выражениях (1, 2) определено математическим выражением:

где g - ускорение свободного падения, м⋅с-2.
С учетом математического выражения (3) математическое выражение (2) приняло следующий вид:

Возвышение наружного рельса h (фиг. 1) определено математическим выражением:

С учетом полученного, преобразовано математическое выражение (4):

Полученное математическое выражение (6) описывает зависимость радиуса кривой от угла наклона экипажной части в кривой, которая необходима для дальнейшего расчета угла отклонения светового потока прожектора.
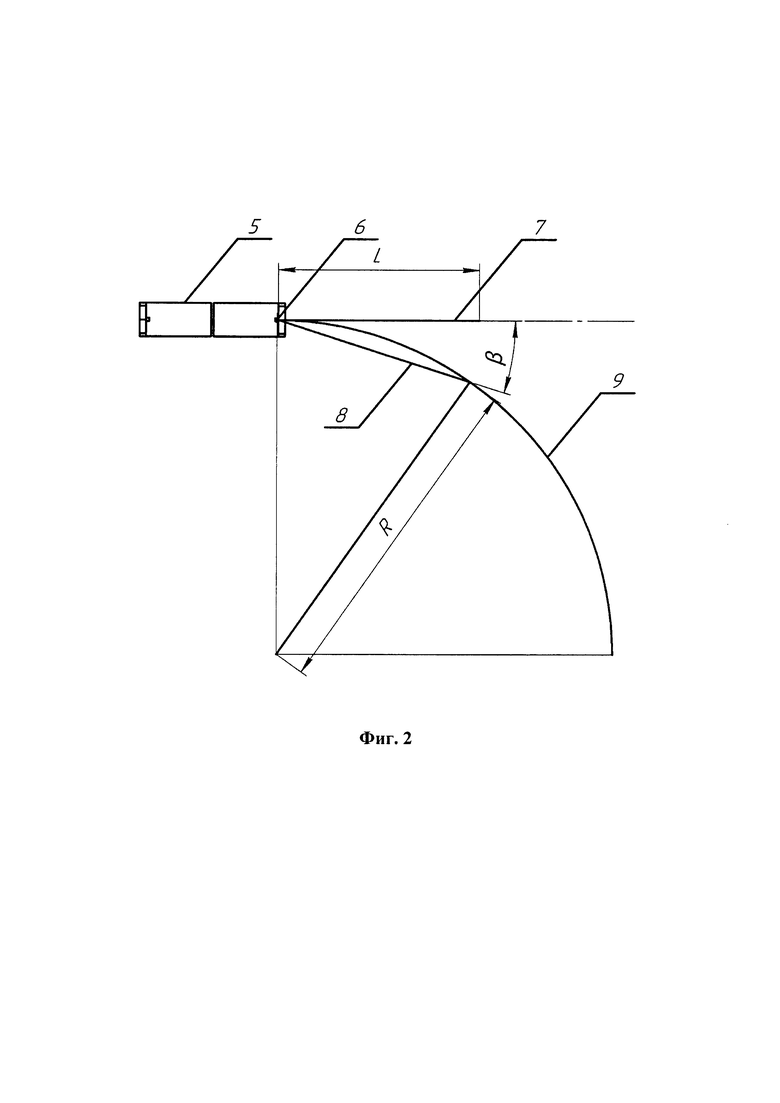
На фиг. 2 представлено схематическое изображение отклонения оси светового потока прожектора в кривых участках пути.
На фиг. 2 отображены: подвижная железнодорожная единица 5, лобовой прожектор 6, выполненный светодиодным матричным, ось светового потока до отклонения 7, ось светового потока после отклонения 8, кривой участок пути 9, дальность действия прожектора L, угол отклонения оси светового потока β, радиус кривой R.
Угол отклонения оси светового потока β прожектора 6 (фиг. 2) определен математическим выражением:

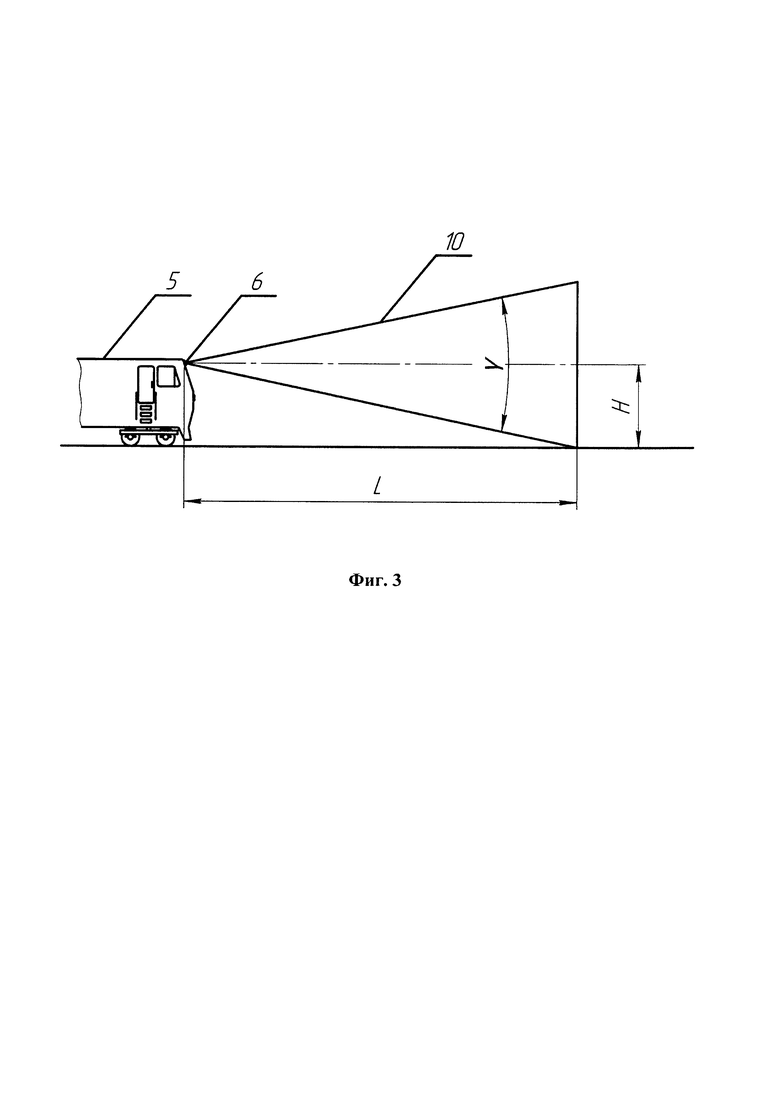
На фиг. 3 представлено схематическое изображение работы прожектора.
На фиг. 3 отображены подвижная железнодорожная единица 5, лобовой прожектор 6, световой поток 10, дальность действия L прожектора 6, угол рассеяния светового потока γ, высота оси светового потока прожектора над уровнем головки рельса Н.
Дальность действия прожектора определена математическим выражением:

С учетом математических выражений (6) и (8) преобразовано математическое выражение (7):

Математическое выражение (9) описывает зависимость угла отклонения оси светового потока прожектора в зависимости от угла наклона тележки в кривой.
Таким образом, определен параметр, присущий каждому кривому участку железнодорожного пути, что позволяет производить отслеживание изменения направления кривой и корректировать направление оси светового потока прожектора для повышения безопасности движения.
Для решения технической задачи и достижения технического результата разработаны способ коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути и система для осуществления этого способа.
В способе коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути, в которых тележка наклоняется на угол α, а ось светового потока прожектора отклоняется на угол β, согласно изобретению, при движении в кривом участке пути инклинометр генерирует сигнал, который через проводной канал связи поступает в вычислительный блок, который определяет точное значение угла наклона тележки относительно гравитационной вертикали и вычисляет необходимый угол отклонения оси светового потока прожектора в зависимости от направления кривой и угла наклона тележки согласно следующему выражению:

где:
Н - высота оси светового потока прожектора над уровнем головки рельса, м;
γ - угол рассеяния светового потока прожектора, °;
k - коэффициент увеличения возвышения наружного рельса, учитывающий смещение центра тяжести тележки в наружную сторону по отношению к оси кривой, принимается равным 1,0 при скоростях движения до 140 км/ч включительно и 1,2 при скоростях более 140 км/ч;
νcp - средневзвешенная квадратическая скорость, км/ч;
g - ускорение свободного падения, м⋅с-2;
α - угол наклона тележки, °;
затем сигнал с вычислительного блока по проводному каналу связи поступает на светодиодный матричный прожектор подвижной железнодорожной единицы для освещения необходимого участка кривой, при этом включение и отключение автоматической коррекции направления светового потока светодиодного матричного прожектора в кривом участке пути выполняется через проводной канал связи с помощью кнопки включения / отключения, расположенной на пульте машиниста.
В системе для коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути, содержащей, по меньшей мере, один прожектор, расположенный в лобовой части подвижной железнодорожной единицы, согласно изобретению, в систему включены, по меньшей мере, один инклинометр, установленный на горизонтальной поверхности первой тележки подвижной железнодорожной единицы, по меньшей мере, один вычислительный блок, расположенный в кабине машиниста, кнопка для управления системой, расположенная на пульте машиниста подвижной железнодорожной единицы, по меньшей мере, три проводных канала связи для подвижной железнодорожной единицы, расположенных в кабине машиниста, при этом в качестве прожектора использован светодиодный матричный прожектор.
Сущность изобретения поясняется чертежами.
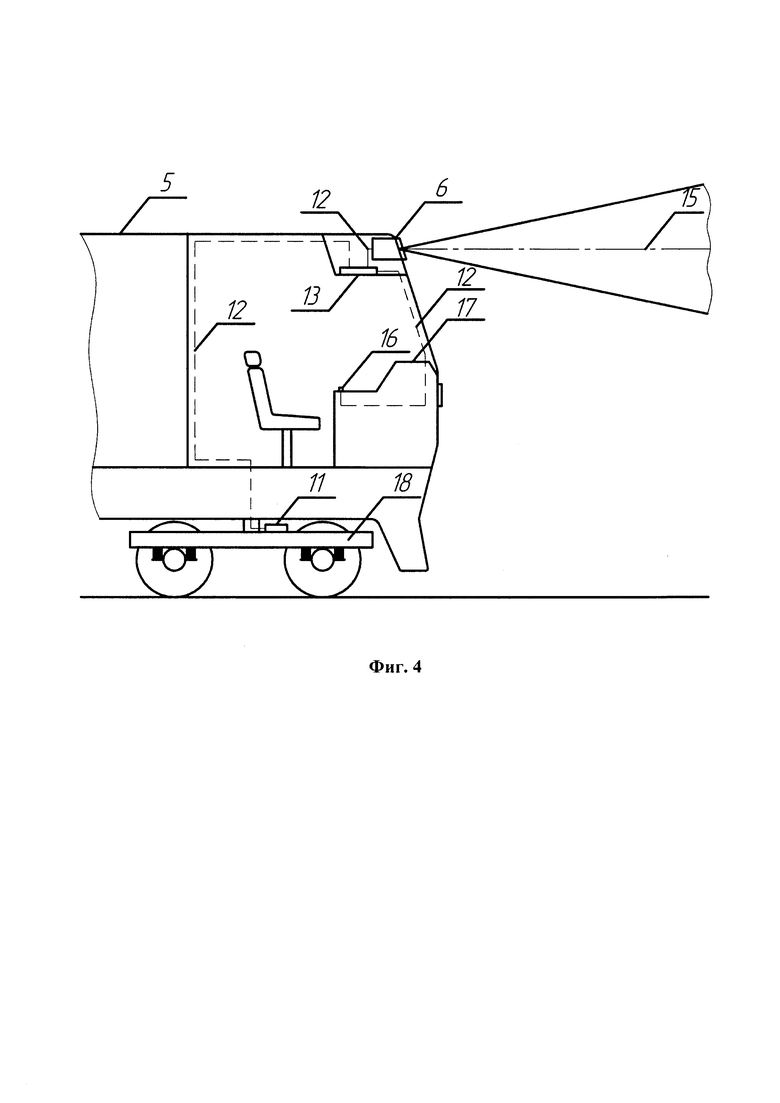
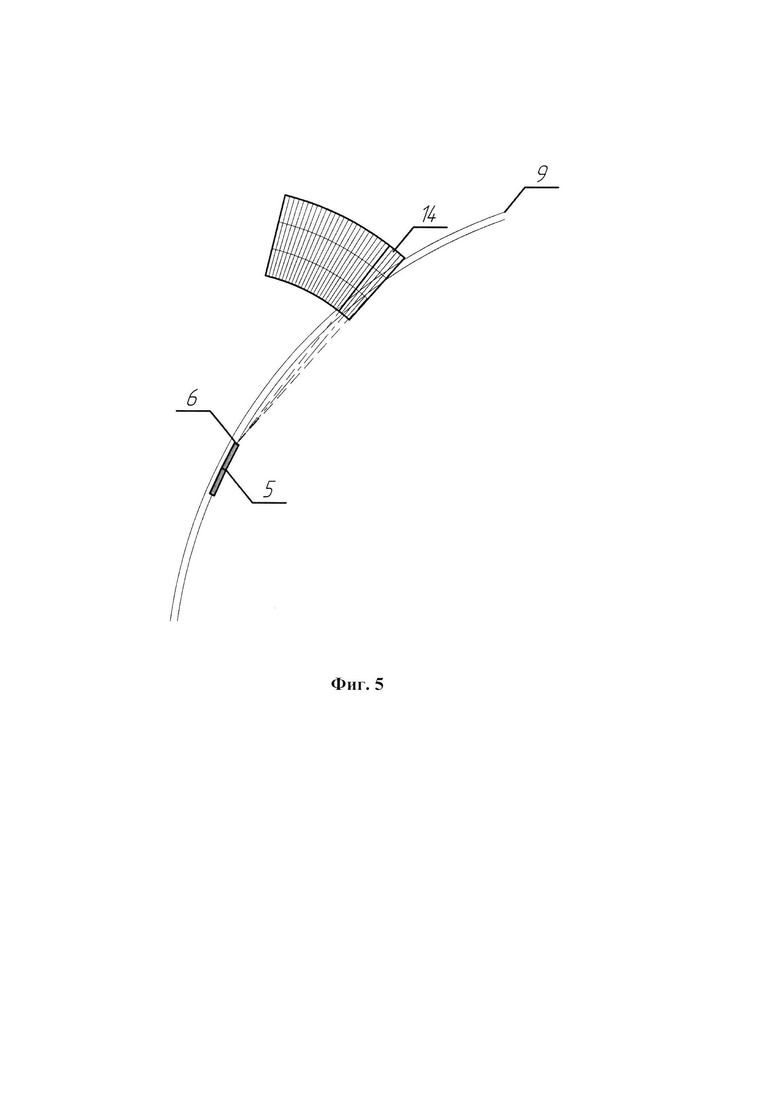
На фиг. 4 представлена общая структура расположения основных элементов системы для коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути; на фиг. 5 показан принцип действия способа коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути с помощью разработанной системы.
Сущность способа заключается в том, что при движении в кривом участке пути, вследствие возвышения наружного рельса над внутренним, тележка подвижного состава наклонена на угол α (фиг. 1), сигнал с инклинометра 11 (фиг. 4) через проводной канал связи 12 поступает в вычислительный блок 13. В вычислительном блоке 13 сигнал с инклинометра 11 преобразуется в значение угла наклона тележки 18. Далее полученное значение угла наклона тележки 18 преобразуется вычислительным блоком 13 в необходимый угол отклонения оси светового потока 15, формируя сигнал управления матричным светодиодным прожектором 14. Сигнал с вычислительного блока 13 по проводному каналу связи 12 поступает на светодиодный матричный прожектор 6 подвижной железнодорожной единицы 5, включая светодиоды (на фигурах не показаны) светодиодного матричного прожектора 6 для освещения необходимого участка 14 (фиг. 5) кривого участка пути 9. Включение и отключение автоматической коррекции направления светового потока светодиодного матричного прожектора 6 в кривой 9 выполняется через проводной канал связи 12 (фиг. 4) с помощью кнопки 16, расположенной на пульте машиниста 17.
Выполнение способа может быть реализовано с помощью системы для коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути.
Система для коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути (фиг. 4) состоит из, по меньшей мере, одного инклинометра 11, установленного на горизонтальной поверхности первой тележки 18 подвижной единицы 5, по меньшей мере, одного вычислительного блока 13, расположенного в кабине машиниста, одной кнопки 16, расположенной на пульте машиниста подвижной единицы 5 и предназначенной для управления системой, по меньшей мере, трех проводных каналов связи 12, расположенных в кабине машиниста подвижной железнодорожной единицы 5, по меньшей мере, одного светодиодного матричного прожектора 6, расположенного в лобовой части подвижной железнодорожной единицы 5.
В качестве инклинометра 11 использован одноосный инклинометр с диапазоном измерения ±10° и абсолютной погрешностью не более 0,01°. В качестве каналов связи возможно использование широко распространенных на подвижном составе каналов связи: CAN либо RS485.
Включение в систему светодиодного матричного прожектора (благодаря его оптической структуре) позволяет изменять направление светового потока без использования в конструкции подвижных элементов, снижающих общую надежность прожектора.
Все элементы системы входят в единую электрическую цепь коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути и являются ее неотъемлемой частью.
Система для коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути работает следующим образом.
Перед началом движения машинист включает систему для коррекции направления светового потока светодиодного матричного прожектора 6 с помощью кнопки 16 (фиг. 4). При движении в кривом участке пути сигнал с инклинометра 11, являющегося чувствительным элементом, по проводному каналу связи 12 поступает на вычислительный блок 13 и преобразуется в значение угла наклона α (фиг. 1). Затем по математическому выражению 9 вычислительным блоком 13 рассчитывается угол отклонения оси светового потока β (фиг. 2). Сигнал управления с вычислительного блока 13 (фиг. 4) по проводному каналу связи 12 передается на светодиодный матричный прожектор 6, включая светодиоды (на фигурах не показаны) матричного светодиодного прожектора 6 для освещения необходимого участка 14 (фиг. 5) кривого участка пути 9. Свет от светодиодов светодиодного матричного прожектора по индивидуальному световоду, для разграничения областей освещаемого пространства, проходит через первичный оптический элемент - рефрактор. Рефрактор задает форму светового потока для каждого светодиода. Затем сформированный поток света проходит через вторичный оптический элемент - рассеивающую линзу. Рассеивающая линза задает рабочую зону освещения для всех светодиодов.
При движении в прямом участке пути инклинометр 11 (фиг. 4) регистрирует нулевой наклон тележки 18. В соответствии с математическим выражением 9, угол отклонения оси светового потока β (фиг. 2) равен нулю, что обеспечивает освещение прямых участков пути.
При необходимости отключения системы, машинист отключает систему с помощью кнопки 16 (фиг. 4). Вычислительный блок 13 устанавливает статический режим работы светодиодного матричного прожектора 6, при этом угол отклонения оси светового потока β (фиг. 2) равен нулю.
Предлагаемые способ и система для коррекции направления светового потока прожектора подвижного состава обеспечивают освещение кривых участков пути при движении в темное время суток. За счет этого локомотивная бригада эффективнее контролирует обеспечение безопасности движения, что обеспечивает повышение безопасности движения поездов в темное время суток, снижение количества аварий на перегонах, повышение надежности перевозочного процесса.
Кроме того, предлагаемая система для коррекции направления светового потока прожектора подвижного состава не сложна, имеет минимальное количество элементов, полностью лишена подвижных элементов, что делает ее надежной. Более того, внедрение предлагаемой системы в типы подвижного состава, находящиеся на эксплуатации в настоящее время, также как и установка в заново проектируемые типы, не трудоемко и легко реализуемо.
Таким образом, применение описанного способа коррекции направления светового потока прожектора при движении в кривых участках пути и системы для осуществления этого способа обеспечит:
- эффективный контроль безопасности движения локомотивной бригадой в темное время суток;
- повышение безопасности движения в темное время суток;
- снижение количества аварий на перегонах;
- повышение надежности перевозочного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОЖЕКТОР РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1993 |
|
RU2038530C1 |
| Способ формирования кривой силы света прожектора, прожектор и светодиодное осветительное устройство прожектора для реализации способа | 2017 |
|
RU2706334C1 |
| ПОВОРОТНОЕ ПОЛИПРОЖЕКТОРНОЕ УСТРОЙСТВО РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1997 |
|
RU2139470C1 |
| Устройство считывания сигнала светофора | 2021 |
|
RU2768694C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ, ХАРАКТЕРИЗУЮЩИХ СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ПО КРИВОЛИНЕЙНОМУ УЧАСТКУ ПУТИ | 1991 |
|
RU2061611C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИИ РЕЛЬСОВОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2256575C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИРИНЫ КОЛЕИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442714C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ В КРУГОВЫХ КРИВЫХ | 1990 |
|
RU2030505C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
Способ коррекции направления светового потока прожектора подвижного состава при движении на кривых участках пути, в котором инклинометр генерирует сигнал, поступающий в вычислительный блок, который определяет значение угла наклона тележки относительно гравитационной вертикали и вычисляет необходимый угол отклонения оси светового потока прожектора в зависимости от направления кривой и угла наклона тележки. Сигнал с вычислительного блока поступает на прожектор. Включение и отключение автоматической коррекции направления светового потока выполняется с помощью кнопки включения/отключения, расположенной на пульте машиниста. Система для коррекции содержит светодиодный матричный прожектор, инклинометр, установленный на горизонтальной поверхности тележки подвижной железнодорожной единицы, вычислительный блок, расположенный в кабине машиниста, кнопку для управления системой на пульте машиниста и три проводных канала связи, расположенных в кабине машиниста. Технический результат - повышение безопасности и надежности движения поездов. 2 н.п. ф-лы, 5 ил.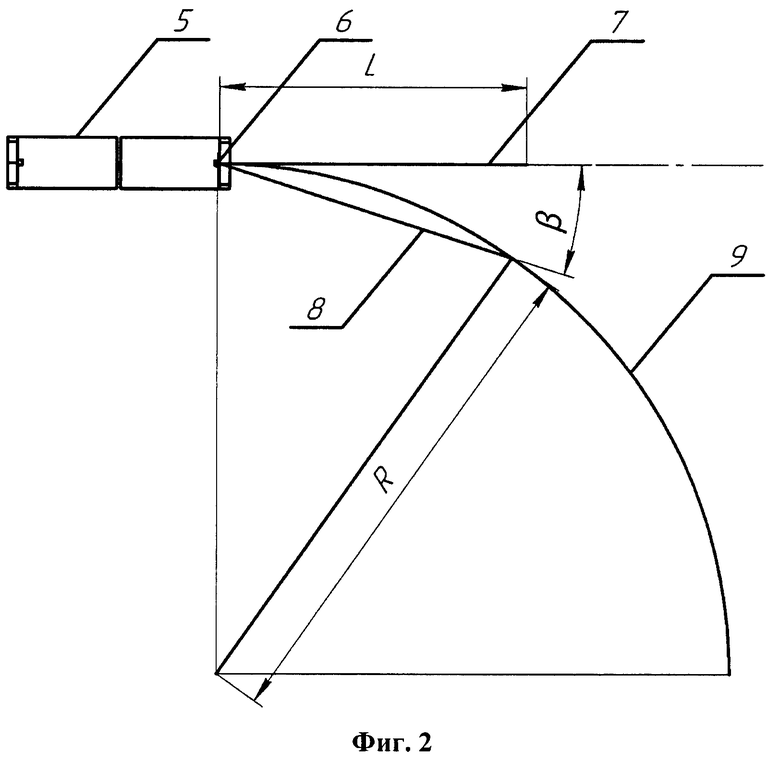
1. Способ коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути, в которых тележка наклоняется на угол α, а ось светового потока прожектора отклоняется на угол β, отличающийся тем, что при движении в кривом участке пути инклинометр генерирует сигнал, который через проводной канал связи поступает в вычислительный блок, который определяет точное значение угла наклона тележки относительно гравитационной вертикали и вычисляет необходимый угол отклонения оси светового потока прожектора в зависимости от направления кривой и угла наклона тележки согласно следующему выражению:

где:
Н - высота оси светового потока прожектора над уровнем головки рельса, м;
γ - угол рассеяния светового потока прожектора, °;
k - коэффициент увеличения возвышения наружного рельса, учитывающий смещение центра тяжести тележки в наружную сторону по отношению к оси кривой, принимается равным 1,0 при скоростях движения до 140 км/ч включительно и 1,2 при скоростях более 140 км/ч;
νcp - средневзвешенная квадратическая скорость, км/ч;
g - ускорение свободного падения, м⋅с-2;
α - угол наклона тележки, °;
затем сигнал с вычислительного блока по проводному каналу связи поступает на светодиодный матричный прожектор подвижной железнодорожной единицы для освещения необходимого участка кривой, при этом включение и отключение автоматической коррекции направления светового потока светодиодного матричного прожектора в кривом участке пути выполняется через проводной канал связи с помощью кнопки включения/отключения, расположенной на пульте машиниста.
2. Система для коррекции направления светового потока прожектора подвижного состава при движении в кривых участках пути, содержащая, по меньшей мере, один прожектор, расположенный в лобовой части подвижной железнодорожной единицы, отличающаяся тем, что в систему включены, по меньшей мере, один инклинометр, установленный на горизонтальной поверхности первой тележки подвижной железнодорожной единицы, по меньшей мере, один вычислительный блок, расположенный в кабине машиниста, кнопка для управления системой, расположенная на пульте машиниста подвижной железнодорожной единицы, по меньшей мере, три проводных канала связи для подвижной железнодорожной единицы, расположенных в кабине машиниста, при этом в качестве прожектора использован светодиодный матричный прожектор.
| ПРОЖЕКТОР РЕЛЬСОВОГО ПОДВИЖНОГО СОСТАВА | 1993 |
|
RU2038530C1 |
| CN 202448997 U, 26.09.2012 | |||
| CN 203414764 U, 29.01.2014 | |||
| JP 2020075674 A, 21.05.2020 | |||
| СПОСОБ ДИНАМИЧЕСКОГО РЕГУЛИРОВАНИЯ ПОЛОЖЕНИЯ СВЕТОВОГО ПУЧКА ФАР ТРАНСПОРТНЫХ СРЕДСТВ В ПРОЦЕССЕ ВЫПОЛНЕНИЯ ПОВОРОТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2314216C2 |

