Изобретение относится к области железнодорожного транспорта, в частности к системам контроля состояния железнодорожного пути, устанавливаемым на подвижном составе.
Известен способ контроля состояния железнодорожного пути, который осуществляется путем координатной привязки показаний путеизмерительных устройств к реперной сети с использованием бортового компьютера, установленного на выправочной машине. На обследуемом участке железнодорожного пути привязку производят к системе координат реперной сети. Для этого используют базу данных реперной системы, в которую вводят вычислительные координаты, отметки и пикетаж реперов с промерами расстояний до ближайшего рельса. На основе этих данных программным путем строят цифровую модель углов поворота трассы обследуемого участка пути. Затем совмещают системы координат путеизмерительного устройства и реперной сети. Далее получают точную непрерывную координатную модель, по которой судят о состоянии железнодорожного пути для постановки в проектное или другое оптимальное положение. Технический результат состоит в повышении эффективности работы путевых машин и механизмов, предназначенных для выправки пути (патент на изобретение RU2226672C2, G01C 5/00, опубл. 10.04.2004).
Недостатком данного способа является необходимость наличия или создания реперной системы для получения координатной модели состояния железнодорожного пути.
Известен мобильный диагностический комплекс автоматизированной оценки состояния объектов железнодорожной инфраструктуры, который содержит комплекс контрольно-измерительных систем и бортовой контрольно-вычислительный комплекс. Комплекс контрольно-измерительных систем снабжен системой контроля и оценки геометрических параметров пути, системой бесконтактного высокоскоростного контроля геометрических параметров рельсов, системой высокоскоростной дефектоскопии рельсов, системой скоростного визуального обнаружения дефектов пути, системой контроля динамики движения поезда, системой скоростного георадиолокационного контроля, системой скоростного контроля габаритов приближения строений, системой скоростного контроля состояния систем железнодорожной автоматики и телемеханики, системой скоростного контроля состояния контактной сети, системой контроля параметров аналоговой радиосвязи, системой контроля параметров цифровой радиосвязи. Мобильный диагностический комплекс снабжен многодискретным синхронизатором по единым координате пути и географической координате, связанным с каждой из контрольно-измерительных систем. Бортовой контрольно-вычислительный комплекс снабжен универсальной системой визуализации синхронизированных данных всех контрольно-измерительных систем, снабженной единым интерфейсом, системой комбинаторного анализа и прогнозирования состояния объектов железнодорожной инфраструктуры, а также системой управления, оснащенной связью с единым информационным пространством железнодорожной инфраструктуры. В результате повышаются скорость и достоверность измерений (патент на изобретение RU2438903, B61K 9/08, опубл. 10.01.2012).
Недостатком комплекса является его высокая техническая сложность и большая стоимость, что обусловливает целесообразность его использования только для ограниченного круга задач и объектов контроля.
Известен способ измерения и изображения геометрии пути системы рельсового пути, который осуществляется при помощи путевой машины на рельсовом ходу, имеющей управляющую измерительную систему для измерения подлежащего корректировке положения пути перед подъемно-рихтовочным устройством, приемочную измерительную систему для замера скорректированного положения пути после подъемно-рихтовочного устройства и подключенные устройства вывода для изображения результатов измерений. Согласно способу подъемно-рихтовочное устройство настраивается в зависимости от результатов измерений управляющей измерительной системы и приемочной измерительной системы в смысле достижения заданной номинальной геометрии рельсового пути. Для создания предпочтительных условий рихтовки из графика кривизны, графика продольного уровня и графика возвышения номинальной геометрии рельсового пути вычисляется трехмерный график положения. Этот трехмерный график положения переводится в перспективное изображение и изображается с помощью устройства вывода. Этот перспективный график положения дополняется измеренными характеристиками дефектов для параметров пути: рихтовки пути, возвышения, перекоса и продольного уровня (патент на изобретение RU2682953, Е01В 29/04, Е01В 35/08, Е01В 35/10, B61K 9/08, опубл. 22.03.2019).
Недостатком способа является его ограниченные функциональные возможности, направленные только на достижение требуемых параметров выправки железнодорожного пути.
Наиболее близким аналогом предлагаемого технического решения является система для контроля железнодорожного пути, подлежащая установке на транспортном средстве для перемещения по железнодорожному пути, которая содержит по меньшей мере, один источник света, расположенный рядом с железнодорожным путем для проецирования пучка света от края до края железнодорожного полотна, по меньшей мере, один оптический приемник, расположенный рядом с железнодорожным путем, для приема, по меньшей мере, части света, отраженного от железнодорожного полотна, и генерации совокупности изображений, представляющих профиль, по меньшей мере, участка железнодорожного полотна, и по меньшей мере, один процессор для анализа совокупности изображений и определения географического местоположения совокупности изображений, причем процессор дополнительно выполнен с возможностью компилирования совокупности изображений с одной или более соответствующими физическими характеристиками, и записи соответствующего географического местоположения совокупности изображений (патент на изобретение RU 2385446, G01C 3/08, B61K 9/08, опубл. 27.03.2010). Данная система принята за прототип.
Недостатком системы является отсутствие возможности получения полной оперативной информации о готовности участка железнодорожного пути к проведению выправочных работ.
Основным недостатком известных из уровня техники устройств является то, что диагностика и контроль параметров железнодорожного пути осуществляются в целях обеспечения безопасности движения поездов и планирования работ по ремонту пути и не обеспечивают получение оперативной информации о состоянии пути непосредственно в месте и в момент времени проведения работ, в частности, по выправке пути. Организация работ по текущему ремонту пути осуществляется на основе информации, заранее полученной от путеизмерительной техники различных типов (путеизмерительные тележки, вагоны-дефектоскопы, мобильные диагностические комплексы, размещаемые на локомотивах и ином подвижном составе). В то же время, для обеспечения высокого качества и безопасности работ по ремонту пути требуется наличие информации о состоянии участка пути, подлежащего ремонту, непосредственно перед началом работ. Состояние пути может существенно отличаться от того, оценка которого была ранее получена на основе данных от путеизмерительных систем.
Например, выправка бесстыкового пути при температуре рельсов существенно выше температуры закрепления рельсовых плетей может стать причиной выброса рельсов (резкого нарушения продольной устойчивости бесстыкового пути в виде одно- или многоволнового горизонтального или вертикального искривления путевой решетки под действием сжимающих продольных сил). Поэтому такие работы разрешается производить при условии, если отклонение в сторону повышения измеренной температуры рельсовых плетей от температуры, при которой они были закреплены, в течение всего времени производства работ не превысит допускаемых значений (как правило, не более, чем на 15°С). При этом должно учитываться, что в летние солнечные дни температура рельсов и температура воздуха нарастают неодинаково. В таких условиях выправка пути должна осуществляться только после выполнения операций по снятию температурных напряжений. На звеньевом пути не допускается приступать к рихтовке, если имеются два и более подряд слитых зазора. В случае наличия в стыках слитых зазоров до начала рихтовки должна быть произведена их регулировка. Важнейшим условием безопасности работ по ремонту пути является отсутствие посторонних и мешающих предметов (например, напольных устройств автоматики и сигнализации, которые должны быть демонтированы перед выполнением данного вида ремонтных работ).
Критериями принятия решения о готовности фронта к производству машинизированной выправки пути являются:
- соответствие температуры рельсовых плетей нормативным значениям, установленным для производства работ по выправке бесстыкового пути;
- наличие и исправное состояние рельсовых скреплений;
- полнота заполнения балластом шпальных ящиков (пространства между соседними шпалами);
- отсутствие на пути предметов, препятствующих выправке пути, в том числе не демонтированного оборудования систем энергообеспечения, автоматики и сигнализации;
- отсутствие угона бесстыкового пути (продольного перемещения рельсов, как правило, направленного в сторону движения поездов);
- соответствие величины межрельсовых стыков нормативным значениям (для звеньевого пути);
- соответствие ширины плеча балластной призмы нормативным значениям.
Целью заявляемого изобретения является расширение функциональных возможностей системы автоматизированной оценки состояния верхнего строения железнодорожного пути и его элементов (в пределах балластной призмы) при работе специального подвижного состава и автоматическое формирование заключения о готовности фронта к проведению работ по машинизированной выправке железнодорожного пути. Данная система подлежит установке непосредственно на путевые машины, которые предназначены для выполнения работ по выправке пути.
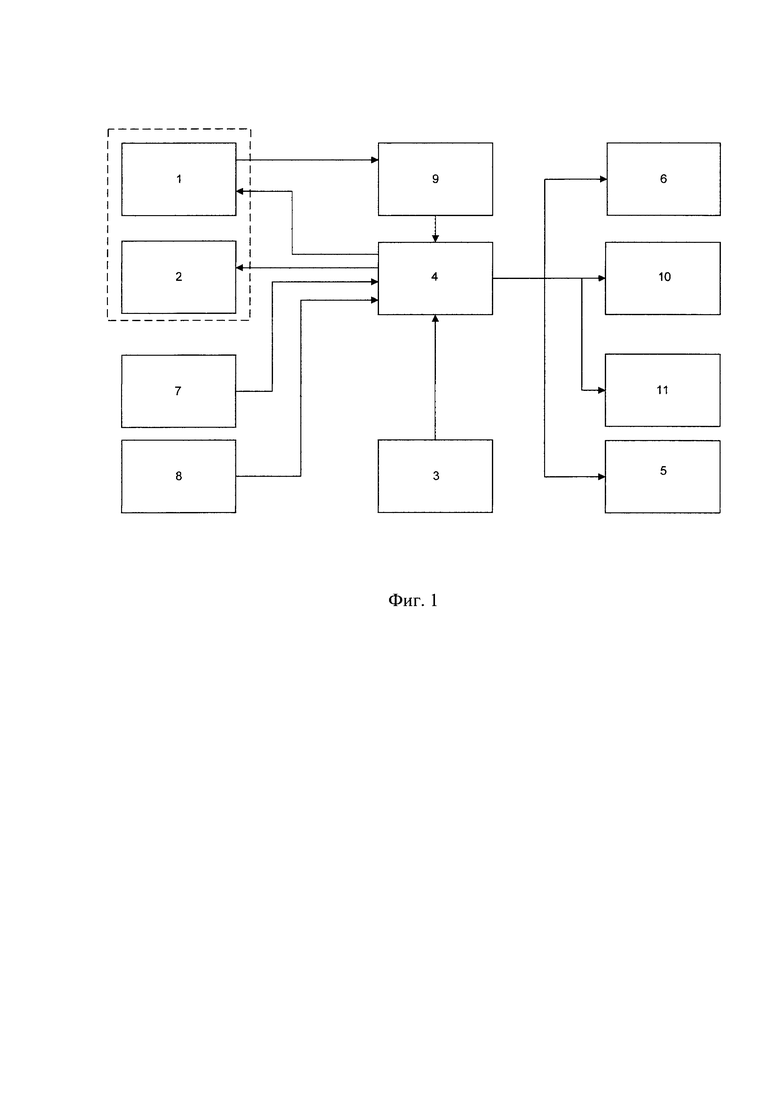
Указанный выше технический результат достигается тем, что система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути содержит по меньшей мере пять видеокамер, модули подсветки для каждой видеокамеры, по меньшей мере один лидар, по меньшей мере два пирометра, модуль спутниковой навигационной системы ГЛОНАСС/GPS, блок видеоаналитики, блок управления и обработки данных, модуль хранения информации, устройство отображения, модуль сопряжения, модуль радиосвязи. Выход видеокамер подключен к входу блока видеоаналитики, выход которого подключен к первому входу блока управления и обработки данных, ко второму, третьему и четвертому входам блока управления и обработки данных подключены выходы, соответственно, лидаров, пирометров и модуля спутниковой навигационной системы, выход блока управления и обработки данных подключен ко входам устройства отображения, модуля сопряжения, модуля хранения информации и модуля радиосвязи, управляющие выходы блока управления и обработки данных соединены с модулями подсветки и видеокамерами.
Сущность изобретения поясняется на Фиг. 1, где представлена структурная схема системы контроля готовности фронта работ по выправке железнодорожного пути. Заявляемая система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути содержит видеокамеры 1, модули подсветки для каждой видеокамеры 2, модуль спутниковой навигационной системы ГЛОНАСС/GPS 3, блок управления и обработки данных 4, модуль хранения информации 5, устройство отображения 6, лидар 7, пирометры 8, блок видеоаналитики 9, модуль сопряжения 10, модуль радиосвязи 11.
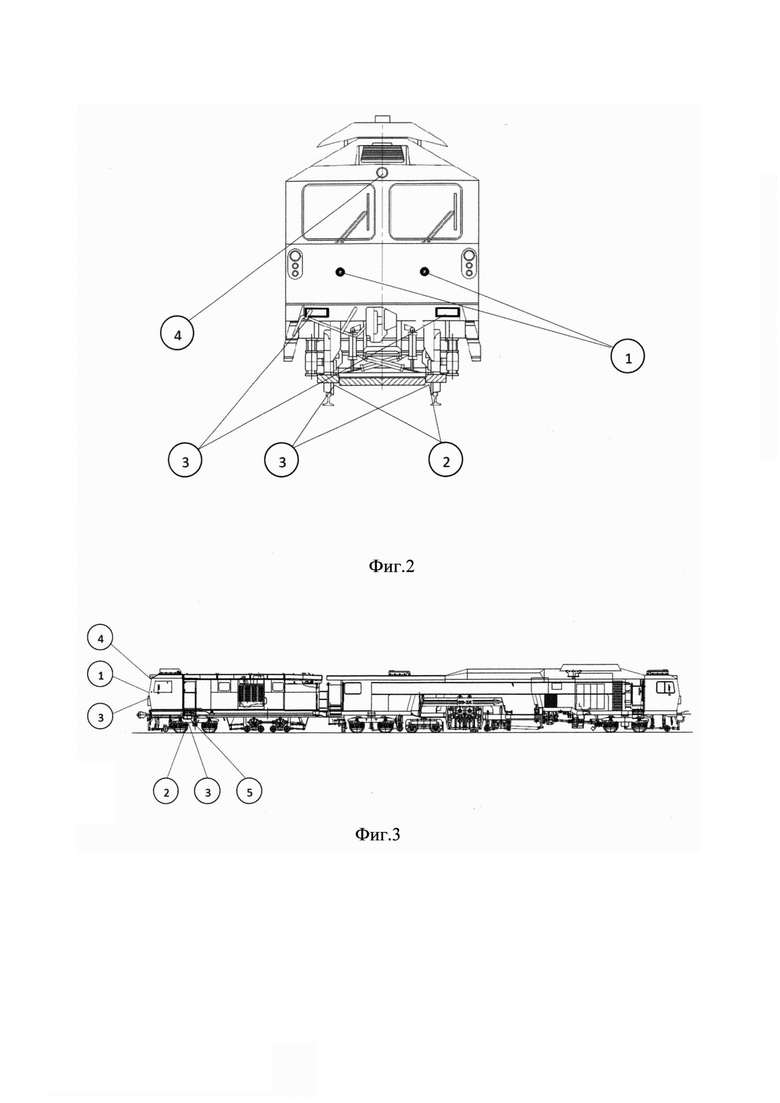
По меньшей мере, одна видеокамера (поз.1 на Фиг. 2 и Фиг. 3) располагается на передней фронтальной поверхности кабины путевой машины, по меньшей мере четыре видеокамеры (поз. 2 на Фиг. 2 и Фиг. 3) размещаются в подвагонном пространстве под кабиной путевой машины по две над правым и левым рельсом, причем одна из них направлена вертикально на рельс, а другая под углом, модули подсветки (поз. 3 на Фиг. 2 и Фиг. 3) для каждой видеокамеры размещаются рядом с видеокамерами и обеспечивают освещение зоны видеонаблюдения, лидар устанавливается на передней фронтальной поверхности кабины путевой машины (поз. 4 на Фиг. 2 и Фиг. 3). Видеокамеры размещаются в термокожухах, обеспечивающих защиту от вредного влияния окружающей среды. Модули подсветки представляют собой бестеневые светодиодные прожекторы. По меньшей мере, 2 пирометра (поз. 5 на Фиг. 3), устанавливаются в подвагонном пространстве путевой машины и направленны на правый и левый рельс соответственно.
Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути работает следующим образом.
Перед началом проведения работ по выправке пути путевая машина должна проехать по участку рельсового пути, на котором планируется выполнить выправку. В процессе движения путевой машины видеокамеры 1 (на Фиг. 1) непрерывно формируют видеопотоки (последовательность изображений объектов наблюдения) в подвагонном пространстве и перед путевой машиной, а модули подсветки 2 обеспечивают надлежащие условия для видеонаблюдения. С помощью лидара 7 осуществляется сканирование рельсового пути непосредственно перед путевой машиной в вертикальной плоскости, а пирометры 8, направленные на правый и левый рельс, измеряют их температуру. С помощью модуля спутниковой навигационной системы 3 происходит непрерывное определение текущих географических координат путевой машины. Информация из модуля спутниковой навигационной системы поступает в блок управления и обработки 4, в котором вся информация, приходящая в блок управления и обработки 4 от лидаров 7, пирометров 8 и блока видеоаналитики 9 привязывается к текущему времени, текущим географическим и линейным железнодорожным координатам.
Видеоданные в цифровом виде передаются от видеокамер 1 в блок видеоаналитики 9. Блок видеоаналитики 9 исполнен на основе промышленного компьютера и обеспечивает первичную обработку, видеораспознавание и видеоидентификацию обнаруженных объектов, то есть отнесение обнаруженного и распознанного объекта к конкретному типу (классу) объектов. Анализ изображений, полученных от видеокамер, реализован на технологии компьютерного зрения с применением нейронной сети и включает определение функции размытия изображения объекта, процедуры извлечения изображения объектов с помощью каскадных классификаторов и характерных точек. Нейронная сеть, применяемая в блоке видеоаналитики, перед началом эксплуатации предварительно обучается путем многократного ввода размеченных изображений типовых объектов, подлежащих обнаружению и идентификации (рельсовые скрепления, межрельсовые стыки, маячные шпалы и рельсы с отметками, типовые конструкции напольного оборудования путей, кабели, типовые посторонние предметы и т.п.).
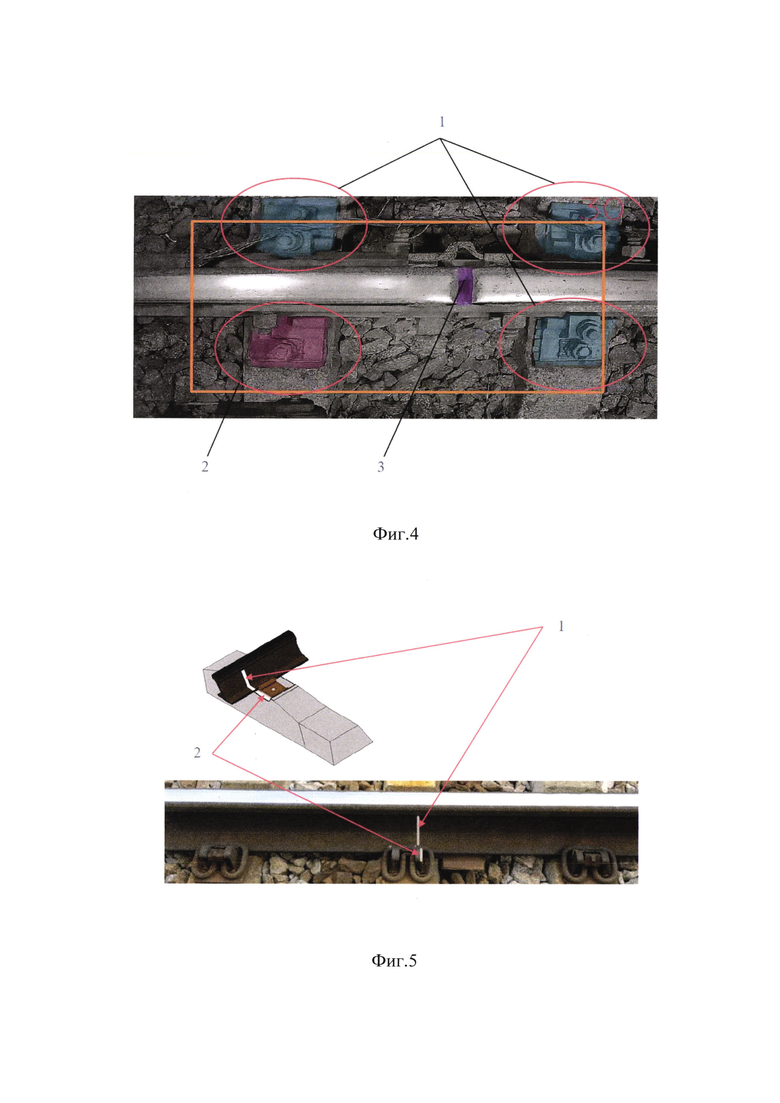
Фиксация нарушений конструкции и отсутствия рельсовых скреплений, а также контроль величины зазоров рельсовых стыков на каждой рельсовой нити производится на основе анализа информации с видеокамер, расположенных в подвагонном пространстве и направленных вертикально на путь. В блоке видеоаналитики с помощью нейронной сети происходит идентификация (наличие или отсутствие) каждого рельсового скрепления, классификация его как исправного (поз. 1 на Фиг. 4) либо неисправного (поз. 2 на Фиг. 4), далее эта информация поступает в блок управления и обработки, где производится привязка результатов контроля к порядковому номеру шпалы и географическим координатам. Величина зазоров рельсовых стыков в единицах измерения длины (поз. 3 на Фиг. 4) вычисляется после идентификации стыка в блоке видеоаналитики путем подсчета количества пикселей, соответствующих изображению стыка, и использования соответствующего коэффициента пересчета Кп (пикс/мм).
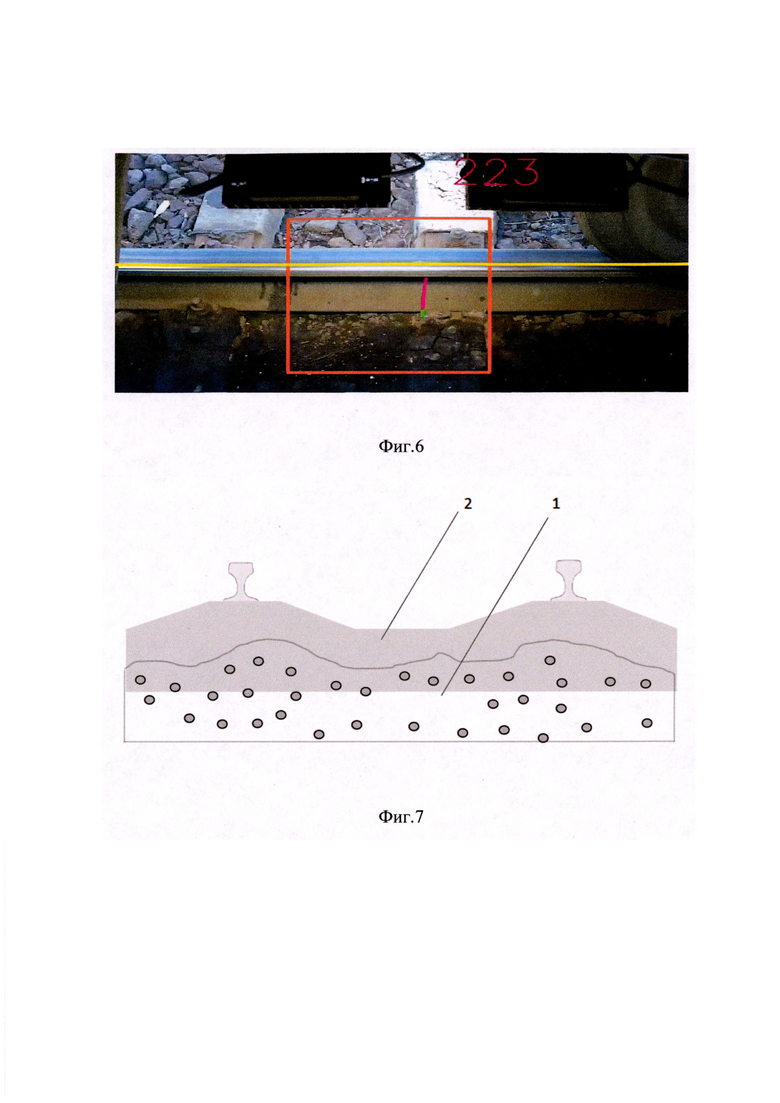
Для контроля отсутствия угона рельсовых плетей используются видеоданные, получаемые блоком видеоаналитики от видеокамер, расположенных в подвагонном пространстве и направленных в сторону правого и левого рельсов под углом относительно вертикали для обеспечения наилучшего обзора поверхностей рельсов, обращенных внутрь колеи. Контроль угона рельсовых плетей осуществляется по обнаружению смещения контрольных сечений рельсовой плети относительно «маячных» шпал. Эти сечения отмечены поперечными полосами шириной 10 мм и наносятся в процессе укладки рельсов несмываемой светлой краской на шейку рельсов внутри колеи (поз. 1 на Фиг 5), а также на «маячную» шпалу на подкладку или на верх подошвы (поз. 2 на Фиг 5). На Фиг. 6 показан результат обработки блоком видеоаналитики изображения контрольных меток на рельсе и маячной шпале.
Величина угона рельсовой плети в единицах измерения длины вычисляется в блоке видеоаналитики путем подсчета количества пикселей, соответствующих смещению между контрольными метками на рельсе и «маячной» шпале, и использованием коэффициента пересчета пикселей в миллиметры Кп (пикс/мм).
Обнаружение наличия на пути предметов, способных вызвать помехи в проведении запланированных работ, а также контроль полноты заполнения балластом шпальных ящиков производится путем обработки и анализа видеоданных, поступающих в блок видеоаналитики от фронтальных камер (видеокамер, установленных на передней поверхности кабины путевой машины).
Обнаружение посторонних предметов осуществляется в блоке видеоаналитики с помощью нейронной сети аналогично вышеописанным процедурам идентификации рельсовых скреплений.
Полнота заполнения балластом шпальных ящиков контролируется путем автоматического анализа потокового видео, формируемого фронтальной видеокамерой в процессе движения путевой машины. Видеокамера, расположенная на фронтальной стороне кабины путевой машины, формирует последовательность изображений рельсового пути. Эти изображения обрабатываются в блоке видеоаналитики, производится выделение видимой области шпалы (поз. 2 на Фиг. 7), не скрытой щебневым балластом (поз. 1 на Фиг. 7).
Далее по изображению вычисляется доля площади боковой поверхности шпалы, не скрытой балластом, от общей площади этой поверхности шпалы. По результатам данной операции в блоке видеоаналитики принимается решение о соответствии (поз. 1 на Фиг. 8) или несоответствии (поз. 2 на Фиг. 8) степени заполнения балластом междушпального пространства.
Результаты обработки видеоданных, полученных от всех видеокамер, поступают в блок управления и обработки, в котором производится привязка всех результатов контроля к географическим и линейным железнодорожным координатам.
Блок управления и обработки также выполняет функции управления модулями подсветки и режимами работы видеокамер (дневной режим, ночной режим, изменение фокусного расстояния и т.д.).
По результатам контроля пути на основе видеоданных (количество отсутствующих рельсовых скреплений, количество неисправных рельсовых скреплений, наличие межрельсовых стыков, не соответствующих нормативным значениям, количество шпальных ящиков с нарушением степени заполнения балластом, наличие на пути предметов, препятствующих выправке пути, отсутствие угона пути) в блоке управления и обработки формируются соответствующие сообщения (сигналы), которые выводятся на экран устройства отображения, установленного в кабине машиниста путевой машины.
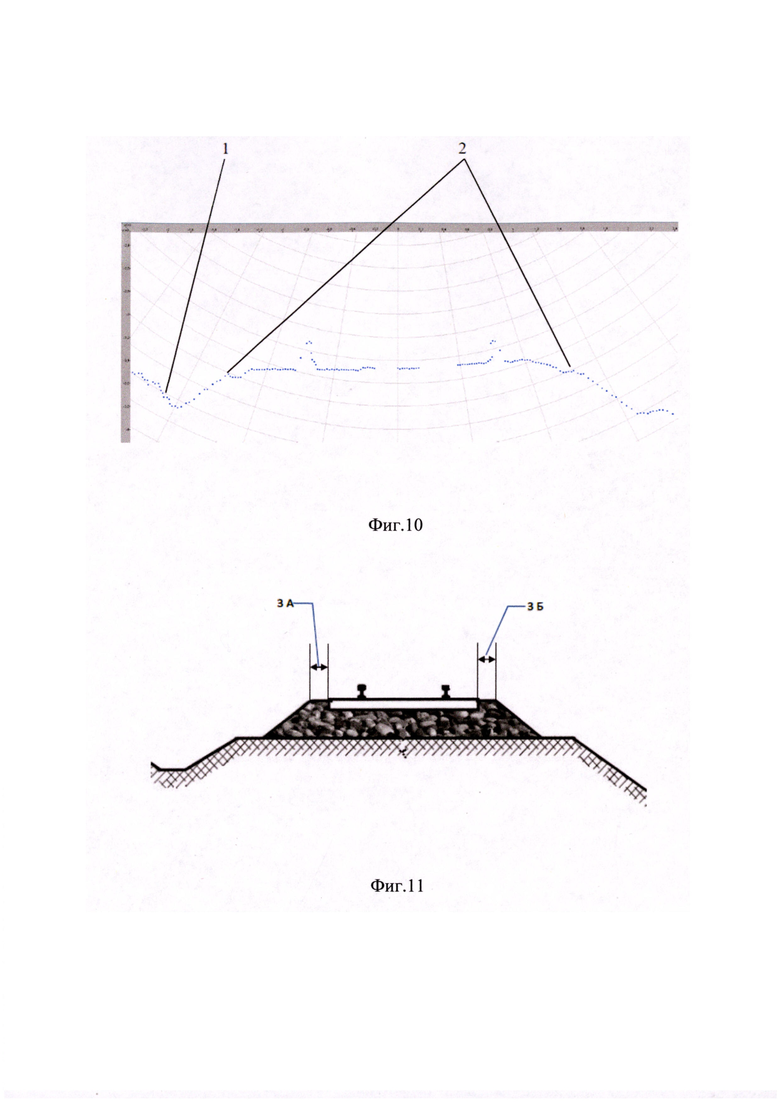
Обнаружение нарушений нормативной ширины плеча балластной призмы (с учетом класса железнодорожного пути) происходит следующим образом. Лидар, установленный на фронтальной стороне кабины путевой машины (поз. 1 на Фиг. 9), осуществляет сканирование поверхности рельсового пути в вертикальной плоскости (поз. 2 на Фиг. 9). Результатом сканирования является облако точек измерений (поз. 1 на Фиг. 10). Каждая точка имеет две координаты: измеренное расстояние до поверхности пути и угол отклонения луча лидара от вертикали, что при известном расстоянии от места установки лидара до рельс позволяет вычислить точки поверхности балластной призмы (поз. 2 на Фиг. 10), соответствующие началу левого и правого плеча балластной призмы рельсового пути. Далее в устройстве управления и обработки производится вычисление ширины левого и правого плеча балластной призмы (поз. 3 на Фиг. 9 и 3А и 3Б на Фиг. 11).
Результаты контроля ширины плеча балластной призмы («соответствует»-«не соответствует») выводятся на устройство отображения.
С помощью пирометров, расположенных в подвагонном пространстве, осуществляется бесконтактное измерение температуры правой и левой рельсовой плети с заданной периодичностью. Данные измерений поступают в блок управления и обработки, где осуществляется предварительная обработка (фильтрация) измерений, привязка их к координатам и сравнение полученных значений с нормативными величинами (нормативной температурой закрепления пути). В случае отклонения температуры рельсов от нормативного значения больше допустимого, в блоке управления и обработки формируется соответствующее сообщение, поступающее на устройство отображения.
Устройство отображения представляет собой дисплей, установленный в кабине путевой машины, и обеспечивает вывод визуализированного заключения для принятия решения о готовности фронта к проведению машинизированной выправки железнодорожного пути по совокупности результатов контроля.
Все результаты контроля, сформированные в устройстве управления и обработки, помимо устройства отображения поступают также в модуль сопряжения, модуль радиосвязи, модуль хранения информации. Модуль сопряжения обеспечивает передачу по установленному протоколу (например, CAN) результатов контроля в иные бортовые системы путевой машины для дальнейшего использования (при необходимости). Модуль радиосвязи может быть реализован на основе GSM-модема либо специализированной радиостанции и обеспечивает передачу результатов контроля (при необходимости) в автоматизированные системы верхнего уровня (систему управления специальным подвижным составом, систему управления процессами ремонта и содержания железнодорожного пути и т.п.). Энергонезависимый модуль хранения информации предназначен для сохранения результатов контроля и обеспечения возможности будущей передачи либо считывания информации, например, при временном пропадании электропитания, для отложенной передачи информации при отсутствии и последующем восстановлении радиосвязи, апостериорного анализа результатов контроля при расхождении их с данными, полученными иными способами (например, визуальным осмотром).
Таким образом, предлагаемая система осуществляет контроль готовности фронта к проведению машинизированной выправки железнодорожного пути и выполняет следующие функции:
- определение нарушений контролируемых параметров с привязкой как к географическим, так и к линейным железнодорожным координатам;
- регистрацию и индикацию места и времени определения критических нарушений норм содержания верхнего строения пути, ограничивающих проведение путевыми машинами работ по выправке пути;
- автоматическое формирование заключения о готовности участка пути к выполнению работ по машинизированной выправке;
- передачу результатов контроля состояния верхнего строения пути в бортовое оборудование путевой машины и по каналам радиосвязи, в частности по каналам сотовой связи;
- сохранение результатов контроля состояния верхнего строения пути в период работы СПС в энергонезависимом модуле памяти и последующую передачу при наличии устойчивых каналов сотовой связи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕКОНСТРУКЦИИ РЕЛЬСОВЫХ ПУТЕЙ | 2014 |
|
RU2584955C1 |
| Информационно-управляющая система перемещения рельсов, шпал и балласта для обеспечения работоспособности железнодорожного пути по заданным критериям | 2020 |
|
RU2738026C1 |
| ИНТЕГРИРОВАННЫЙ ПОСТ АВТОМАТИЗИРОВАННОГО ПРИЕМА И ДИАГНОСТИКИ ПОДВИЖНОГО СОСТАВА (ПРИЗМА) | 2019 |
|
RU2720603C1 |
| СПОСОБ ОЦЕНКИ ИЗМЕНЕНИЯ УСТОЙЧИВОСТИ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ ПОСЛЕ ПРОВЕДЕНИЯ РАБОТ ПО ВЫПРАВКЕ И ПОДБИВКЕ РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ | 2024 |
|
RU2825208C1 |
| СПОСОБ ОПОВЕЩЕНИЯ РАБОТАЮЩИХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА ПРИ ВЫПОЛНЕНИИ РАБОТ НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2606755C1 |
| СПОСОБ КОНТРОЛЯ РЕЛЬСОВЫХ ПЛЕТЕЙ БЕССТЫКОВОГО ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454344C1 |
| Система управления снегоуборочным поездом | 2024 |
|
RU2821695C1 |
| УСТАНОВКА ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ СВАРНЫХ СТЫКОВ РЕЛЬСОВ | 2018 |
|
RU2704951C1 |
| ПУТЕВАЯ МАШИНА | 2001 |
|
RU2196860C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |

Изобретение относится к средствам контроля состояния железнодорожного пути, устанавливаемым на подвижном составе. Система содержит по меньшей мере пять видеокамер, модули подсветки для каждой видеокамеры, по меньшей мере один лидар, по меньшей мере два пирометра для измерения температуры рельсов, модуль спутниковой навигационной системы ГЛОНАСС/GPS, блок видеоаналитики, блок управления и обработки данных, модуль хранения информации, устройство отображения, модуль сопряжения, модуль радиосвязи. Выход видеокамер подключен к входу блока видеоаналитики, выход которого подключен к первому входу блока управления и обработки данных, ко второму, третьему и четвертому входам блока управления и обработки данных подключены выходы, соответственно, лидаров, пирометров и модуля спутниковой навигационной системы, выход блока управления и обработки данных подключен ко входам устройства отображения, модуля сопряжения, модуля хранения информации и модуля радиосвязи, управляющие выходы блока управления и обработки данных соединены с модулями подсветки и видеокамерами. Достигается расширение функциональных возможностей системы автоматизированной оценки состояния верхнего строения железнодорожного пути и его элементов в пределах балластной призмы. 11 ил.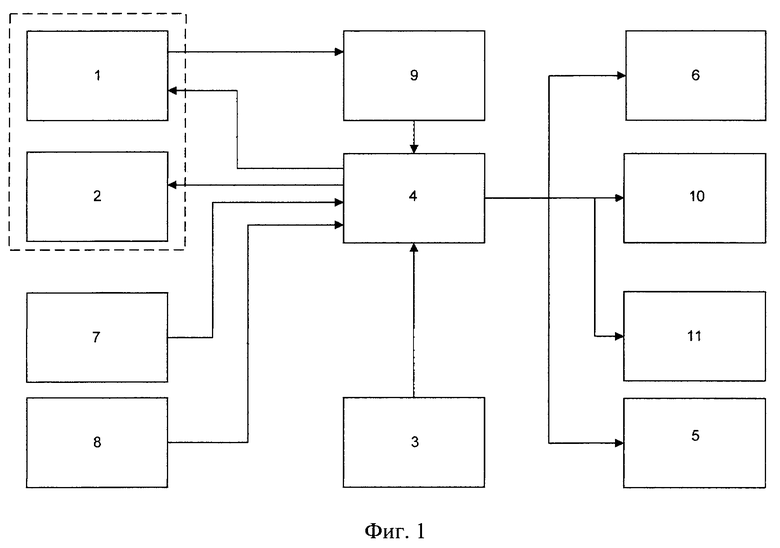
Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути, содержащая по меньшей мере пять видеокамер, по меньшей мере одна камера расположена на передней фронтальной поверхности кабины путевой машины, по меньшей мере четыре видеокамеры размещаются в подвагонном пространстве под кабиной путевой машины по две над правым и левым колесом, причем одна из них направлена вертикально на рельс, а другая - под углом, модули подсветки для каждой видеокамеры, модуль спутниковой навигационной системы ГЛОНАСС/GPS, блок управления и обработки данных, модуль хранения информации, устройство отображения, отличающаяся тем, что дополнительно содержит по меньшей мере один лидар, установленный на передней фронтальной поверхности кабины путевой машины, по меньшей мере два пирометра, установленные в подвагонном пространстве путевой машины и направленные на правый и левый рельсы соответственно, блок видеоаналитики на основе нейронной сети, модуль сопряжения, модуль радиосвязи, при этом выход видеокамер подключен к входу блока видеоаналитики, выход которого подключен к первому входу блока обработки данных, ко второму, третьему и четвертому входам блока управления и обработки данных подключены выходы, соответственно, лидара, пирометров и модуля спутниковой навигационной системы, выход блока управления и обработки данных подключен ко входам устройства отображения, модуля сопряжения, модуля хранения информации и модуля радиосвязи, управляющие выходы блока управления и обработки данных соединены с модулями подсветки и видеокамерами.
| СИСТЕМА И СПОСОБ ДЛЯ КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2005 |
|
RU2385446C2 |
| Устройство для контроля положения рельсового пути | 2017 |
|
RU2672334C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ШПАЛ | 2013 |
|
RU2538482C1 |
| Способ получения продуктов конденсации фенолов с формальдегидом | 1924 |
|
SU2022A1 |

