Изобретение относится к области машиностроения, в частности, к актуаторам конечностей и может быть использовано в медицине, космонавтике, строительстве, на промышленных предприятиях.
Известен линейный актуатор, содержащий жесткий шпиндель с резьбой с мотором, вращение которого приводит шпиндель в движение (заявка US №20120222510, MПК F16H 19/02, публ. 2012).
Недостатками такой конструкции являются жесткость конструкции, позволяющая придавать шпинделю только прямолинейное движение, относительно большой размер и ограничение резьбой длины, на которую может выдвигаться шпиндель.
Известен линейный актуатор, содержащий цепь, зажатую между двух шестеренок, двигающих ее при вращении (патент US №7905156, МПК В66С 23/00, публ. 2008).
Недостатками такого решения являются отсутствие возможности быстрого изменения направление движения цепи по вертикальной оси, а также то, что размер звеньев цепи обязан быть сопоставимым с размером шестерней.
Наиболее близким к предлагаемому устройству является экзоскелет кисти руки человека, содержащий жесткие линейные актуаторы, приводом для которых является блок моторов, установленный на каркасе устройства, располагающегося на тыльной стороне ладони, причем в качестве датчика движения конечностей используют потенциометры, которые регистрируют изменения в положении пальцев. Каждый палец по отдельности соединен посредством актуатора с мотором, установленным на основании, которое представляет собой корпус микроконтроллера, управляющего работой моторов. Само основание может крепиться на ладони с помощью нейлоновых ремней, металлических или пластиковых колец и т.д. В некоторых вариантах осуществления управления может использоваться как пять отдельных модулей обратной связи по силе для каждого пальца, так и один общий модуль, чтобы соответствовать всем пяти пальцам руки. Для каждого из пальцев в качестве датчика может использоваться пара перпендикулярно расположенных потенциометров. В роли потенциометров могут выступать потенциометры вращения или оптические датчики, магнитные датчики и т.п.Данные с потенциометров поступают в микроконтроллер, который, анализируя их, приводит в действие нужные моторы, передающие крутящий момент на линейный привод, вследствие чего происходит сгибание пальцев руки(заявка US №20160259417, MПК G06F 3/014, G06F 3/016, G06F 3/017, G06T 19/006, G08B 6/00, публ. 2016).
Недостатками известного решения являются расположение корпуса устройства непосредственно на самой кисти, что увеличивает нагрузку на ладонь, расположение моторного привода непосредственно на самой кисти, что уменьшает возможную площадь соприкосновения каркаса с кожей, которая нужна для ликвидации нагрузки моторов, использование ненадежных потенциометров в качестве датчиков движения пальцев, которые не могут регистрировать изменения в положении пальцев, если последние выйдут за пределы границ действия потенциометра, и не имеют прямого контакта с кожей, а также жесткость линейного привода.
Технической задачей предлагаемого изобретения является создание эргономичного, легкого и подвижного привода для экзоскелета, имеющего упрощенную систему передачи силы.
Техническая задача достигается тем, что в перчатке-экзоскелете с линейными актуаторами, содержащей линейные актуаторы по количеству пальцев на руке, модуль управления, который является источником питания моторов и управляет направлением вращения моторов, ремни, кольца и напальчники для крепления перчатки на конечности, а также соединительные элементы для механической связи моторов с кольцами и напальчниками, соединительными элементами являются гибкие штоки, представляющие собой скрученные нити, которые одним концом закреплены на валах моторов, размещенных на большом браслете, пропущены через сквозные отверстия, выполненные в малом браслете и через проушины, выполненные в нижней части колец для продольного расположения нитей вдоль предплечья, и жестко прикреплены другим концом к напальчникам, причем большой и малый браслеты, являющиеся элементами крепления на предплечье, оснащены ремнями и соединены жесткой сцепкой, длина которой соответствует индивидуальному размеру предплечья. Внутри каждого напальчника имеются электрические кнопки для управления направлением вращения вала мотора.
Линейный актуатор содержит мотор, жестко закрепленный к станине и подключенный к модулю управления, и гибкий шток, одним концом соединенный с валом мотора, а другим - с кубом, имеющим возможность перемещения по направляющей, выполненной в станине.
Технический результат заключается в эргономичности, простоте и безопасности в использовании за счет возможности соединения движимой части и привода на технически сложной поверхности благодаря гибкости актуатора, которая позволяет изгибать его вдоль поверхности, полезной длины хода штока, которой является почти вся длина нити, малый размер актуатора и возможность регулировки его длины, возможность использования в качестве натяжителя любой вид прутковых изделий (например, кевларовые нити), что во много раз повышает предельную мощность актуатора.
Сущность поясняется следующими чертежами.
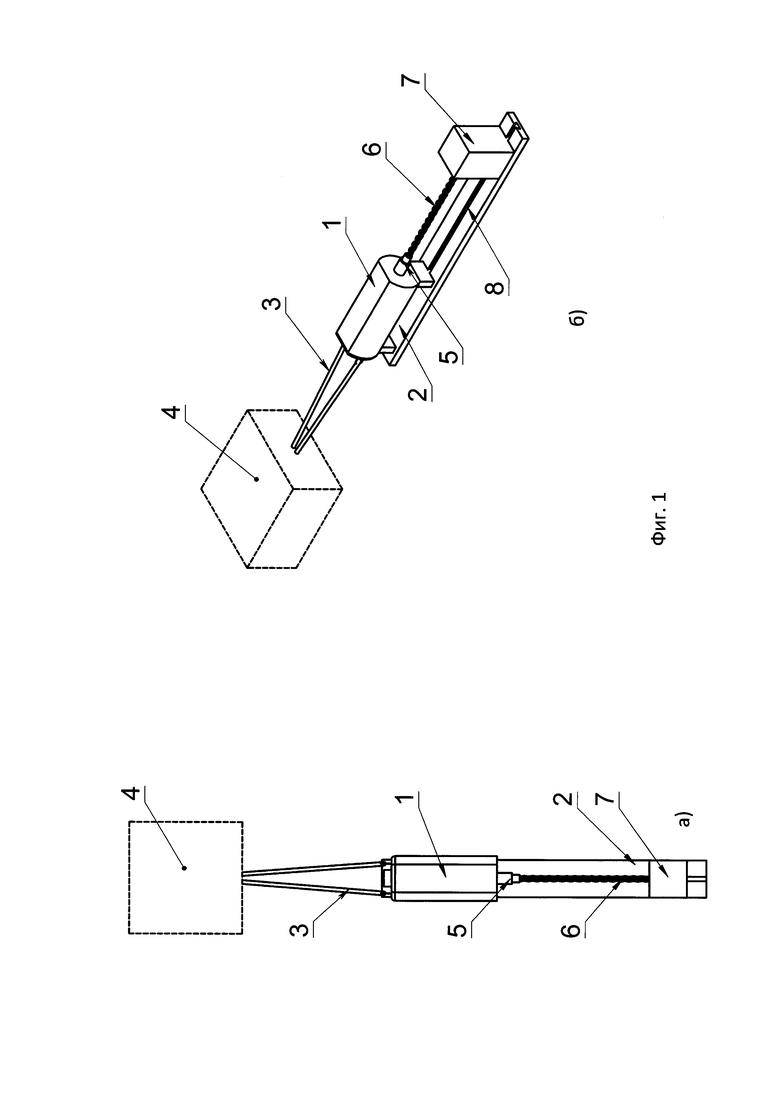
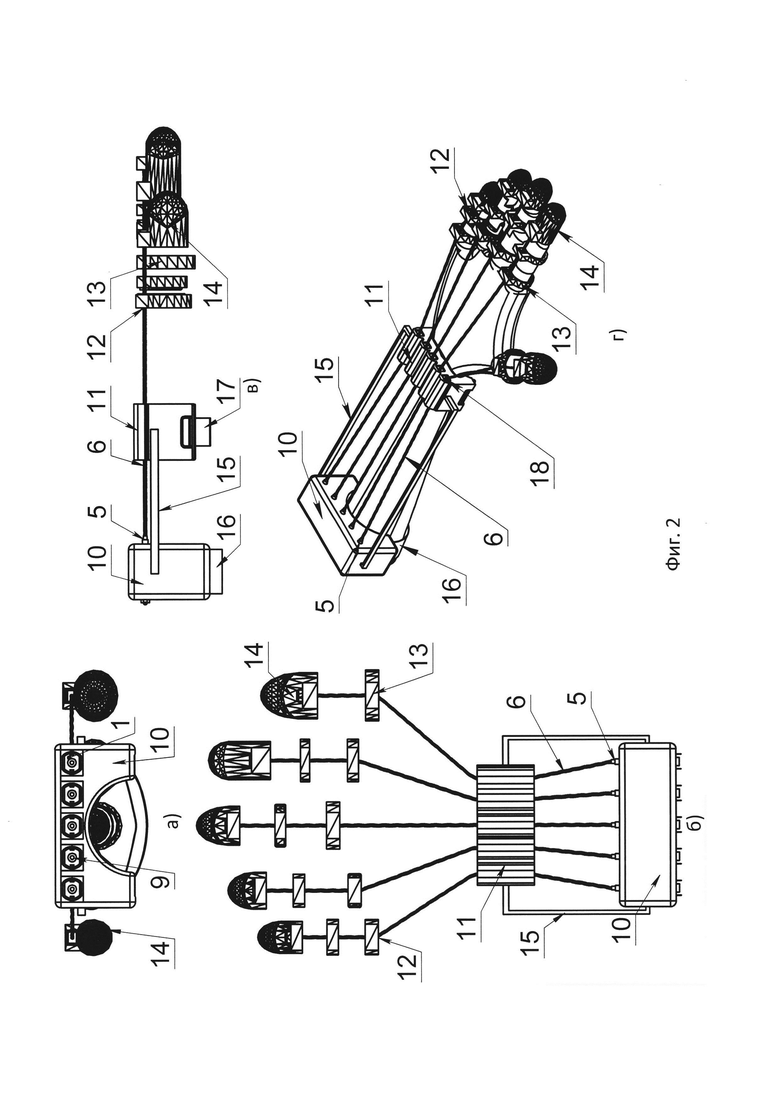
На фиг. 1 представлена схема линейного актуатора с гибким штоком; на фиг. 2 - схема перчатки-экзоскелета с линейными актуаторами в сборе.
Линейный актуатор (фиг. 1а, б) содержит мотор 1, жестко закрепленный на станине 2, изготовленной, например, из пластика. К контактам мотора 1 присоединены провода 3, подключенные к модулю 4, являющемуся источником питания мотора 1, который управляет направлением вращения мотора 1. На валу 5 мотора 1 закреплена скрученная, например, нейлоновая, кевларовая или из другого упругого материала нить 6, являющаяся гибким штоком, одним концом закрепленная на валу 5 мотора 1, а другим - например, на кубе 7, изготовленном, например, из пластика. Куб 7 закреплен на станине 2. В станине 2 выполнена направляющая 8 для возможности перемещения куба 7.
Перчатка-экзоскелет с линейными актуаторами (фиг. 2а) содержит пять актуаторов (по количеству пальцев на руке), каждый из которых подключен к соответствующему мотору 1, закрепленному в соответствующем посадочном месте 9 в большом браслете 10, изготовленном, например, из пластика, по индивидуальным размерам предплечья. Нити 6 (фиг. 2б) пропущены через сквозные отверстия, выполненные в малом браслете 11 для продольного расположения нитей 6 вдоль предплечья, и через проушины 12, выполненные в нижней части колец 13. Одними концами нити 6 закреплены на валах 5 моторов 1, а другими жестко прикреплены к напальчникам 14, выполняющим функцию куба 7, тем самым осуществляя механическую связь между моторами 1 и напальчниками 14. Малый браслет 11 изготовлен, например, из пластика по индивидуальным размерам предплечья. Жесткая сцепка 15, соединяющая большой браслет 10 с малым браслетом 11, изготовлена например, из пластика. Одними концами жесткая сцепка 15 зафиксирована на боковых стенках большого браслета 10, а другими концами - на боковых стенках малого браслета 11. Длина жесткой сцепки 15 выбрана, исходя из индивидуальных размеров предплечья. Высота расположения жесткой сцепки 15 на боковых стенках большого браслета 10 и малого браслета 11 выбрана, исходя из индивидуальных размеров предплечья. Кольца 13 в количестве девяти элементов изготовлены, например, из пластика, по индивидуальным размерам пальцев. Напальчники 14 в количестве пяти элементов, изготовлены, например, из пластика по индивидуальным размерам пальцев. К напальчникам 14 жестко закреплены нити 6. Напальчники 14 надеваются на верхние фаланги пальцев. Напальчники 14 на верхних фалангах пальцев размещены так, чтобы нити 6 проходили по внутренней стороне ладони. Внутри каждого из напальчников 14 имеются две электрические кнопки (на рисунке не показаны), расположенные под подушечкой пальца и над ногтем. В нижней части большого браслета 10 (фиг. 2в) протянут ремень 16 для закрепления большого браслета 10 на предплечье. Большой браслет 10 закреплен на внутренней стороне предплечья с помощью ремня 16. В нижней части малого браслета 11 протянут ремень 17 для закрепления малого браслета 11 на предплечье. Малый браслет 11 закреплен на внутренней стороне предплечья с помощью ремня 17.Перчатка-экзоскелет, надетая на руку, повернутую внутренней стороной ладони кверху, представлена на фиг. 2г. В нижней части колец 13 имеются проушины 12, через которые пропущены нити 6, которые далее пропущены через сквозные отверстия 18 в малом браслете 11. Кольца 13 надевают на основные и средние фаланги пальцев. Кольца 13 на фалангах размещают так, чтобы проушины 12 размещались на внутренней стороне ладони.
Работа линейного актуатора с гибким штоком заключается в следующем.
Модуль 4 включает мотор 1. Вследствие вращения вала 5 мотора 1, нить 6 скручивается и натягивается, из-за чего уменьшается ее длина и совершается полезная работа, куб 7 движется в сторону мотора 1. При изменении направления вращения мотора 1, посредством команды с модуля 4, нить 6 раскручивается.
Работа перчатки-экзоскелета с линейными актуаторами заключается в следующем.
При нажатии электрической кнопки, находящейся под подушечкой пальца в напальчнике 14 мотор 1, отвечающий за нажатую электрическую кнопку, начинает вращаться. Вследствие вращения вала 5 мотора 1, нить 6 начинает скручиваться и натягиваться, из-за чего уменьшается ее длина, совершается полезная работа и палец сжимается. При нажатии кнопки, находящейся над ногтем, мотор 1 начинает вращаться в противоположную сторону относительно предыдущего варианта. Вследствие вращения вала 5 мотора 1 в обратную сторону, нить 6 начинает раскручиваться, из-за чего ее натяжение слабеет и палец разжимается. В случае неисправности мотора 1 и его неуправляемого вращения необходимо нажать электрическую кнопку, отвечающую за противоположное вращение мотора 1, что приведет к остановке мотора 1, пока нажата электрическая кнопка.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯЦИОННЫЙ МОДУЛЬ ЭКЗОСКЕЛЕТА, ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯЦИОННОГО МОДУЛЯ ЭКЗОСКЕЛЕТА, ПАЛЕЦ ЗАХВАТНОГО УСТРОЙСТВА МАНИПУЛЯЦИОННОГО МОДУЛЯ ЭКЗОСКЕЛЕТА | 2020 |
|
RU2769584C1 |
| ЛИНЕЙНЫЙ АКТУАТОР ДЛЯ УСТРОЙСТВА ИСКУССТВЕННОЙ РУКИ | 2021 |
|
RU2791805C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
| Роботизированное устройство тренажера для реабилитации конечностей и способ его применения | 2021 |
|
RU2766754C1 |
| Тренажер с биологической обратной связью для реабилитации суставов и мышц кистей и пальцев рук | 2020 |
|
RU2735986C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 2016 |
|
RU2698281C2 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ | 2012 |
|
RU2493580C1 |
| Мышечный интерпретатор | 2023 |
|
RU2826231C1 |
| СПОСОБ ПРИЕМА ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2132565C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
Изобретение относится к области машиностроения, в частности к актуаторам конечностей, и может быть использовано в медицине, космонавтике, строительстве, на промышленных предприятиях. Перчатка-экзоскелет содержит линейные актуаторы по количеству пальцев на руке, модуль управления, который является источником питания моторов и управления направлением их вращения, ремни, кольца и напальчники для крепления перчатки на конечности и соединительные элементы для механической связи моторов с кольцами и напальчниками. Соединительные элементы являются гибкими штоками, выполненными в виде скрученных нитей, которые одними концами закреплены на валах моторов, размещенных на большом браслете, пропущены через сквозные отверстия в малом браслете и через проушины колец с обеспечением продольного расположения нитей вдоль предплечья и жесткого прикрепления их другими концами к напальчникам. Большой и малый браслеты выполнены с возможностью их крепления на предплечье с помощью ремней и соединены жесткой сцепкой, длина которой соответствует индивидуальному размеру предплечья. В результате обеспечивается эргономичная, простая и безопасная конструкция при использовании. 2 з.п. ф-лы, 2 ил. 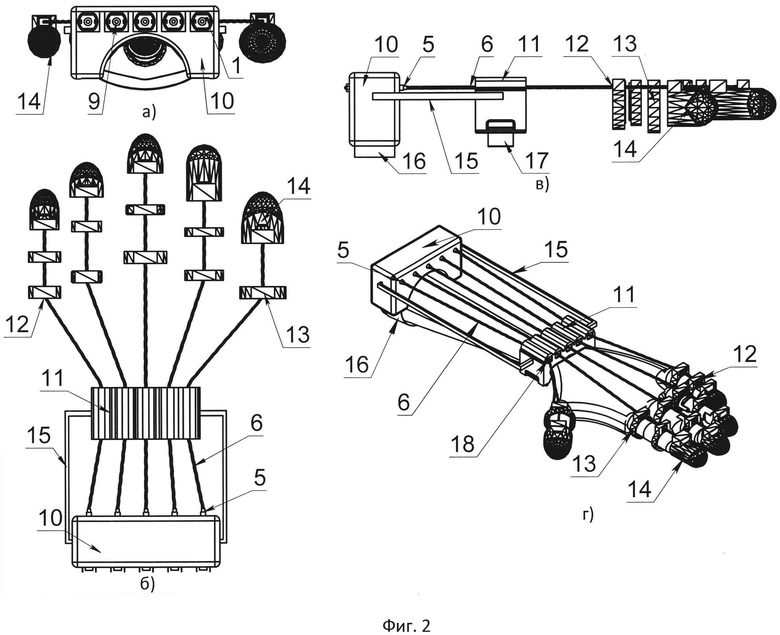
1. Перчатка-экзоскелет с линейными актуаторами, содержащая линейные актуаторы по количеству пальцев на руке, модуль управления, который является источником питания моторов и управления направлением их вращения, ремни, кольца и напальчники для крепления перчатки на конечности и соединительные элементы для механической связи моторов с кольцами и напальчниками, отличающаяся тем, что упомянутые соединительные элементы являются гибкими штоками, выполненными в виде скрученных нитей, которые одними концами закреплены на валах моторов, размещенных на большом браслете, пропущены через сквозные отверстия, выполненные в малом браслете, и через проушины, выполненные в нижней части колец, с обеспечением продольного расположения нитей вдоль предплечья и жесткого прикрепления их другими концами к напальчникам, при этом большой и малый браслеты выполнены с возможностью их крепления на предплечье с помощью ремней и соединены жесткой сцепкой, длина которой соответствует индивидуальному размеру предплечья.
2. Перчатка-экзоскелет по п. 1, отличающаяся тем, что моторы линейных актуаторов жестко закреплены в большом браслете и подключены к модулю управления.
3. Перчатка-экзоскелет по п. 1, отличающаяся тем, что внутри каждого напальчника имеются электрические кнопки для управления направлением вращения вала мотора.
| Токарный резец | 1924 |
|
SU2016A1 |
| СТАНОК ДЛЯ ДОВОДКИ ПЛАСТИН | 0 |
|
SU181515A1 |
| Способ изготовления защитных, например, от радиационных поражений материалов | 1958 |
|
SU147759A1 |
| Пассивный реабилитационный экзоскелет | 2017 |
|
RU2665386C1 |

