[0001] Изобретение относится к медицинской технике и может быть использовано для медико-социальной реабилитации пациентов с нарушениями локомоторной и постуральной функций вследствие заболеваний, травм и пороков развития нервной системы и опорно-двигательного аппарата разной тяжести, в том числе детским церебральным параличом, миелодисплазиями, артрогрипозом, спинномозговой и черепно-мозговой травмами, а также с задержками в психомоторном развитии. Характерной особенностью изобретения является возможность использовать его при реабилитации пациентов различных возрастов с частичной или полной тетраплегией.
[0002] Известно устройство для обучения и/или реабилитации пациентов, не способных ползать на четвереньках (RU 2272608, А61Н 3/00, 2004), выполненное на основе лотка или пуфика под грудь и живот пациента, с приспособлениями для фиксации к лотку или пуфику тела пациента. Устройство содержит две поперечные транспортные ручки, выполненные для избирательного приподнимания или опускания передней или задней частей лотка или пуфика и для горизонтального перемещения лотка или пуфика, при этом каждая ручка прикреплена одним концом к левой боковине лотка или пуфика, а другим концом к правой боковине, причем места крепления транспортных ручек разнесены на каждой боковине в продольном направлении к переднему и заднему концам лотка или пуфика.
[0003] Известно устройство для обучения ходьбе и движениям пациента с психоневрологическими нарушениями и заболеваниями опорно-двигательного аппарата (RU 2454986, A61H 3/00, 2011), содержащее функциональный скелет, выполненный из соединенных между собой жестких элементов с возможностью регулирования длины каждого жесткого элемента. В верхней части элемента, расположенного вертикально напротив позвоночника пациента, со стороны спины жестко закреплен первый поперечный элемент, а в нижней его части жестко закреплен второй поперечный элемент.
[0004] К концам первого поперечного элемента шарнирно крепятся элементы, располагающиеся с тыльных сторон плеча, предплечья и кисти, соединенные между собой шарнирно в местах расположения локтевых и лучезапястных суставов пациента. К концам второго поперечного элемента шарнирно крепятся элементы, располагающиеся с тыльных сторон бедра, голени и под стопой пациента, соединенные между собой шарнирно в местах расположения коленных и голеностопных суставов пациента.
[0005] Жесткие элементы функционального скелета имеют устройства для фиксации туловища и верхних и нижних конечностей пациента на функциональном скелете, выполненные в виде эластичных тяг с регулируемым натяжением. В каждом из шарнирных соединений функционального скелета установлен электродвигатель, вращающий жесткий элемент по заданной программе.
[0006] Жесткий вертикальный элемент функционального скелета в средней своей части выполнен с шарнирным соединением и связан с электродвигателем, обеспечивающим поворот влево-вправо туловища пациента на заданный угол, а на первом поперечном жестком элементе функционального скелета жестко закреплены жесткие тяги для подъема функционального скелета над опорной поверхностью.
[0007] Известна опора для ползания «Светлячок», описанная в полезной модели RU 147419, А61Н 3/00, 2014. Данная опора предназначена для обучения навыку ползания на четвереньках детей с диагнозом детский церебральный паралич (ДЦП), с травмой позвоночника, нарушениями функций опорно-двигательного аппарата, а также при задержках в развитии детей. Поставленная задача достигается опорой для ползания, включающей мягкое ложе с боковыми сторонами под грудь и живот ребенка, с приспособлениями для фиксации тела.
[0008] К мягкому ложу прикреплены стропы для избирательного приподнимания или опускания передней или задней частей мягкого ложа. Места крепления строп разнесены на каждой боковой стороне в продольном направлении к переднему и заднему концам ложа. Опора снабжена колесами. Опора выполнена в форме перекрещивающихся и жестко закрепленных в верхней части дугообразных ножек, к которым подвешено с помощью строп мягкое ложе. В верхней части дугообразных ножек выполнены отверстия для строп мягкого ложа. Стропы выполнены с возможностью регулирования по длине.
[0009] Концы дугообразных ножек прикреплены к платформам, имеющим вертикальные щитки с внутренней стороны, обращенной к мягкому ложу. К нижней части платформ прикреплены колеса. Мягкое ложе в области таза ребенка образует трусики, имеющие по бокам застежки. Мягкое ложе имеет приспособления для фиксации тела ребенка в форме поперечного ремня для туловища и нагрудных ремней вдоль туловища. Данное устройство улучшает условия для реабилитации детей со слабым тонусом мышц или со спастической патологией, а также позволяет обучать двигательным паттернам в более комфортных и безопасных условиях, с уменьшением трудоемкости при проведении курса реабилитации.
[0010] Применение активных экзоскелетов, прогресс в разработке и производстве которых в последнее время отмечается в технологически передовых странах, позволяет проводить реабилитацию пациентов с нарушениями опорно-двигательного аппарата в условиях максимально приближенных к естественным движениям. Однако используемые в настоящее время экзоскелеты позволяют выполнять реабилитационные мероприятия только у пациентов с нарушениями двигательных функций нижних конечностей. При этом в большинстве случаев необходимо дополнительно использовать ручные костыли, что требует специальной подготовки пациента, а также не всегда возможно при определенных заболеваниях. Кроме того, обычно пациента в экзоскелете во время движения страхует ассистент.
[0011] В заявляемом изобретении предлагается в качестве естественных движений, выполняемых активным экзоскелетом, использовать режим тетрапедальной ходьбы, т.е. ходьбы на четвереньках. Такое движение позволяет задействовать одновременно верхние и нижние конечности пациента. Это дает возможность проводить эффективную реабилитацию даже пациентов с полной потерей способности использовать все четыре конечности и туловище. Кроме того, ограничением применения активных экзоскелетов являются нарушение целостности кожных покровов в крестцовой и пяточной областях, а также над позвоночником. Устройство для тетрапедальной ходьбы снимает давление с этих зон и преодолевает эти ограничения.
[0012] Использование активного экзоскелета, реализующего режим тетрапедальной ходьбы, позволяет максимально возможно ограничить физическое взаимодействие обслуживающего персонала с пациентом в процессе реабилитации, исключить опорные костыли, используемые с экзоскелетами при бипедальной ходьбе, упростить подготовку пациента к реабилитации.
[0013] Технический результат предлагаемого изобретения заключается в расширении арсенала технических средств устройств реабилитации пациентов с нарушениями локомоторной и постуральной функций при заболеваниях/травмах/пороках развития нервной системы и опорно-двигательного аппарата. Кроме того, техническим результатом также является уменьшение габаритов, повышение мобильности устройства, а также возможность полностью автоматизировать процесс реабилитации и исключить риск получения травм.
[0014] Указанный технический результат достигается за счет того, что устройство реабилитации пациентов с нарушениями локомоторной и постуральной функций содержит активный экзоскелет и несущую тележку, предназначенную для взаимодействия с ним.
[0015] Активный экзоскелет включает в себя тазовое звено, предназначенное для крепления к нижней части торса пациента, и спинку, предназначенную для крепления к торсу пациента и состоящую из двух частей. Нижняя часть спинки соединена с тазовым звеном с возможностью вращения (поворота) в поперечной (горизонтальной) плоскости, а верхняя соединена с нижней частью с возможностью вращения (поворота) в сагиттальной плоскости.
[0016] Активный экзоскелет также включает в себя правое звено бедра и левое звено бедра, каждое из которых установлено на тазовом звене с возможностью вращения (поворота) в сагиттальной плоскости и предназначено для крепления к соответствующему бедру пациента.
[0017] Активный экзоскелет также включает в себя правое звено голени и левое звено голени, каждое из которых установлено на соответствующем звене бедра с возможностью вращения (поворота) в сагиттальной плоскости и предназначено для крепления к соответствующей голени пациента.
[0018] Активный экзоскелет также включает в себя правое звено стопы и левое звено стопы, каждое из которых установлено на соответствующем звене голени и предназначено для крепления к соответствующей стопе пациента. Каждое звено стопы имеет в носовой части контактную площадку, предназначенную для взаимодействия с опорной поверхностью, т.е. поверхностью, по которой будет перемещаться активный экзоскелет в процессе осуществления реабилитационных мероприятий.
[0019] Активный экзоскелет также включает в себя правое звено плеча и левое звено плеча, каждое из которых установлено на верхней части спинки с возможностью вращения (поворота) в сагиттальной плоскости и предназначено для крепления к соответствующему плечу пациента.
[0020] Активный экзоскелет также включает в себя правое звено предплечья и левое звено предплечья, каждое из которых установлено на соответствующем звене плеча с возможностью вращения (поворота) в сагиттальной плоскости и предназначено для крепления к соответствующему предплечью пациента.
[0021] Активный экзоскелет также включает в себя правое и левое звено кисти, каждое из которых установлено на соответствующем звене предплечья и предназначено для крепления к соответствующей кисти пациента. Каждое звено кисти имеет контактную площадку, предназначенную для взаимодействия с опорной поверхностью.
[0022] Звенья активного экзоскелета могут иметь регулировки под антропометрические параметры пациента или могут быть выполнены индивидуально для каждого конкретного пациента. Крепление звеньев активного экзоскелета к соответствующим частям тела может осуществляться любыми известными средствами. В частности, могут использоваться ремни или лямки, в том числе упругие.
[0023] Активный экзоскелет также включает в себя правую контактную площадку и левую контактную площадку, каждая из которых расположена в области соответствующего коленного сустава и предназначена для взаимодействия с опорной поверхностью.
[0024] Активный экзоскелет также включает в себя первые соединительные элементы, расположенные на спинке. В качестве соединительных элементов могут быть использованы различные замки, фиксирующие и сцепные устройства, захваты и т.п. как с ручным приводом, так и автоматические.
[0025] И, кроме того, активный экзоскелет включает в себя электроприводы, предназначенные для осуществления относительного движения между верхней и нижней частями спинки, между нижней частью спинки и тазовым звеном, между тазовым звеном и звеньями бедра, между звеньями бедра и голени, между верхней частью спинки и звеньями плеча, между звеньями плеча и предплечья, а также систему управления, связанную с электроприводами.
[0026] Для специалистов в данной области техники будет понятно, что электроприводы для активного экзоскелета могут представлять из себя комбинации различных типов электродвигателей и механических передач, таких как зубчатые, ременные и шарико-винтовые передачи. Также очевидно, что система управления может быть реализована с использованием стандартных электронных устройств, включая промышленные контроллеры и встраиваемые компьютеры.
[0027] Несущая тележка выполнена в виде П-образной рамы на колесах и включает в себя электромеханический манипулятор с траверсой. На траверсе расположены вторые соединительные элементы, предназначенные для взаимодействия с первыми соединительными элементами активного экзоскелета.
[0028] Электромеханический манипулятор выполнен с возможностью фиксации активного экзоскелета в первом (начальном) положении и с возможностью перемещения активного экзоскелета из первого положения на опорную поверхность во второе (рабочее) положение.
[0029] Первым (начальным) положением активного экзоскелета является такое положение, при котором активный экзоскелет зафиксирован на электромеханическом манипуляторе в положении, наиболее удобном для помещения в него пациента, например, как будет показано далее, в позе «сидя с вытянутыми вперед руками».
[0030] В частном случае исполнения устройства реабилитации каждое звено стопы установлено на соответствующем звене голени с возможностью вращения (поворота) в сагиттальной плоскости, а устройство снабжено дополнительными электроприводами активного экзоскелета, предназначенными для осуществления относительного движения между звеньями стопы и голени.
[0031] В частном случае исполнения устройства реабилитации каждое звено кисти установлено на соответствующем звене предплечья с возможностью вращения (поворота) в сагиттальной плоскости, а устройство снабжено дополнительными электроприводами активного экзоскелета, предназначенными для осуществления относительного движения между звеньями кисти и предплечья.
[0032] Вышеизложенное представляет собой краткое изложение сущности изобретения и, таким образом, может содержать упрощения, обобщения, включения и/или исключения подробностей; следовательно, специалистам в данной области техники следует принять во внимание, что данное краткое изложение сущности изобретения является только иллюстративным и не подразумевает какое-либо ограничение.
[0033] Для лучшего понимания сути предлагаемого решения ниже приводится описание конкретного примера выполнения, не являющееся ограничительным примером практической реализации устройства реабилитации в соответствии с заявляемым изобретением со ссылками на рисунки, на которых представлено следующее.
[0034] На фиг. 1 изображено устройство реабилитации с экзоскелетом в первом положении, вид спереди, аксонометрия.
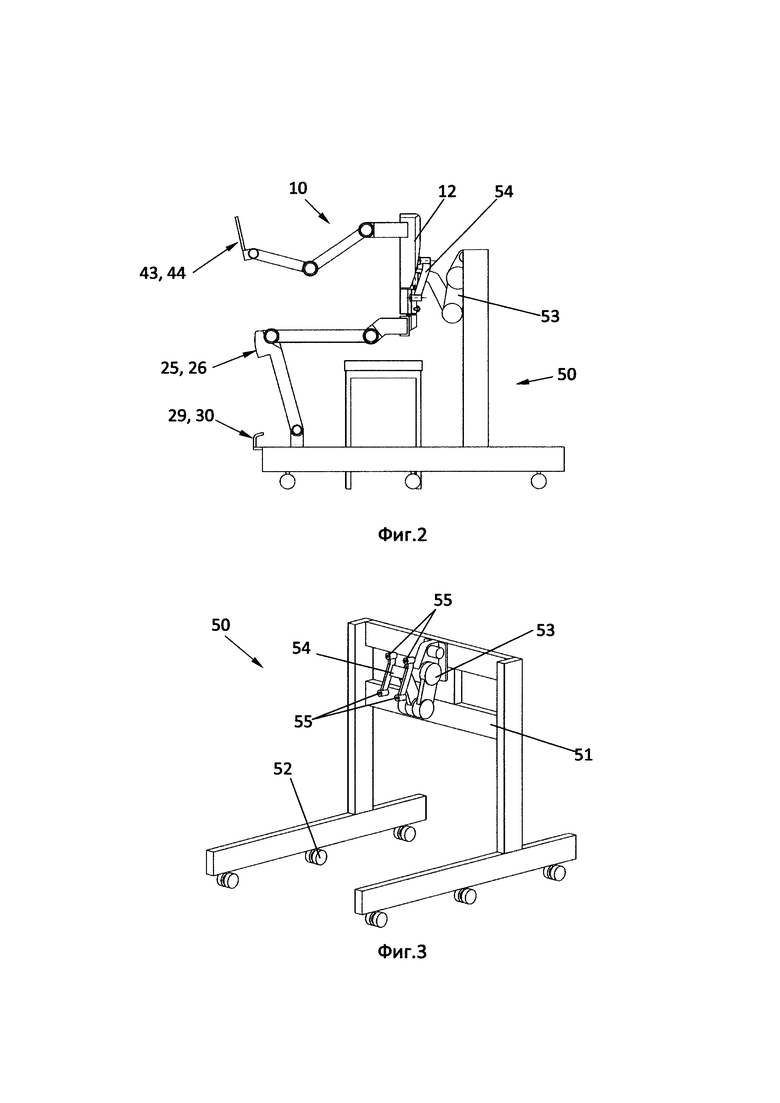
[0035] На фиг. 2 изображено устройство реабилитации, вид справа.
[0036] На фиг. 3 изображена несущая тележка, вид спереди, аксонометрия.
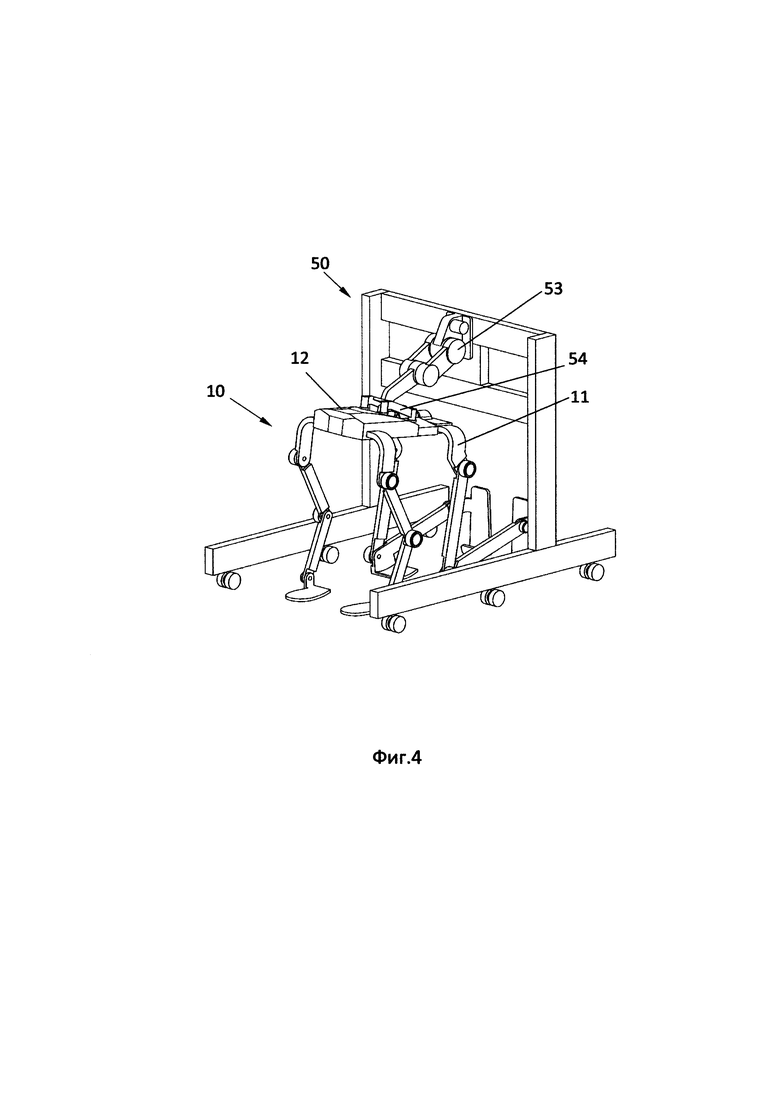
[0037] На фиг. 4 изображено устройство реабилитации с экзоскелетом во втором положении, вид спереди, аксонометрия.
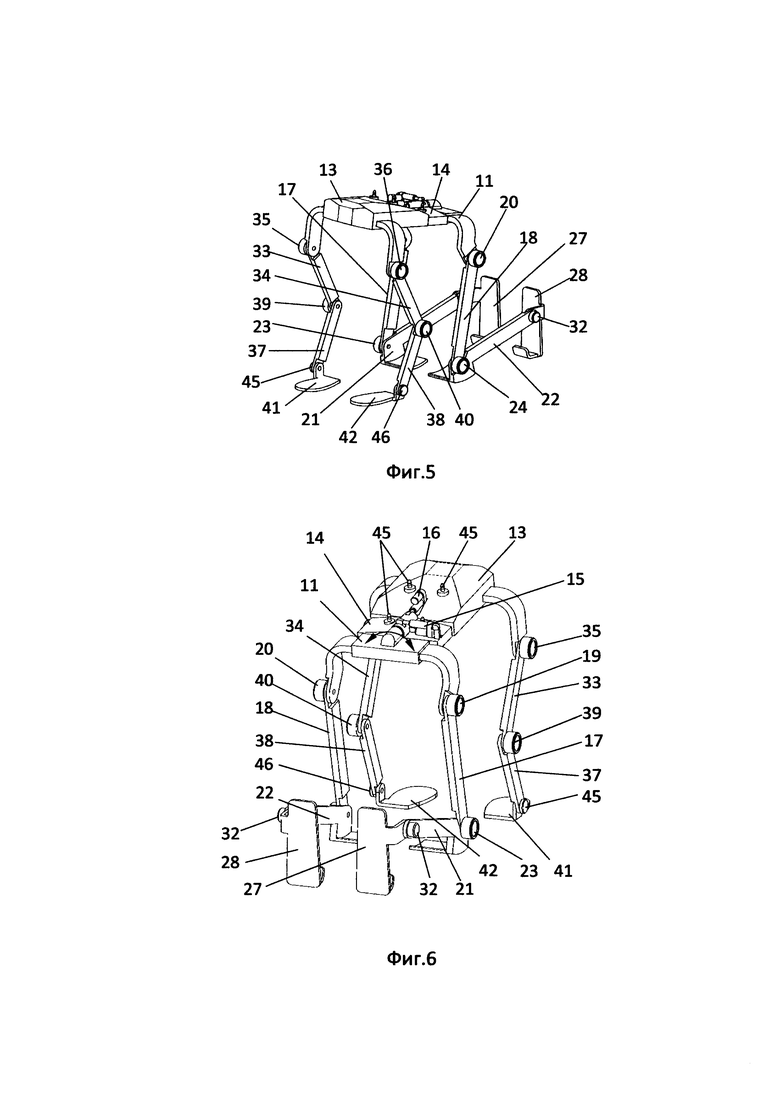
[0038] На фиг. 5 изображен активный экзоскелет во втором положении, вид спереди, аксонометрия.
[0039] На фиг. 6 изображен активный экзоскелет во втором положении, вид сзади, аксонометрия.
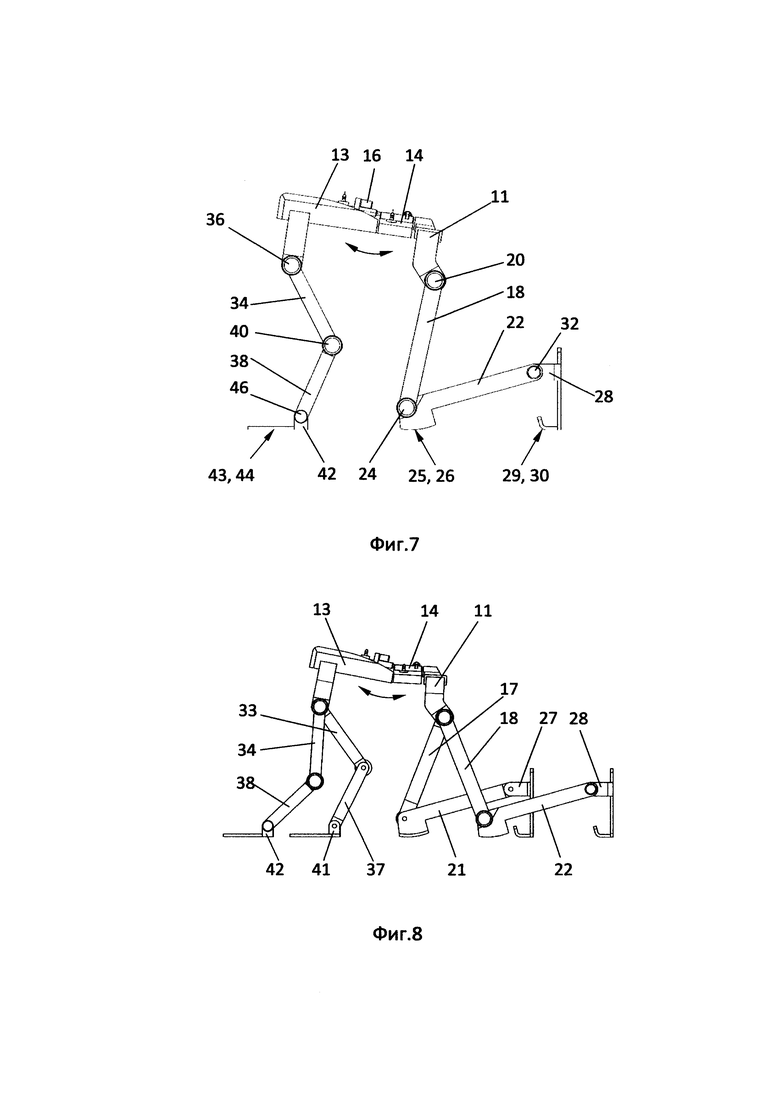
[0040] На фиг. 7 изображен активный экзоскелет во втором положении, вид справа.
[0041] На фиг. 8 изображен активный экзоскелет в движении, вид справа.
[0042] Следует учесть, что на чертежах представлены только те детали, которые необходимы для понимания существа предложения, а сопутствующее оборудование, хорошо известное специалистам в данной области, на чертежах не представлено.
[0043] Как показано на фиг. 1 устройство реабилитации 1 пациентов с нарушениями опорно-двигательного аппарата содержит активный экзоскелет 10 верхних и нижних конечностей и несущую тележку 50. Активный экзоскелет 10 и несущая тележка 50 выполнены таким образом, что они соединены в первом положении и разъединены во втором положении.
[0044] Активный экзоскелет 10 включает в себя тазовое звено 11 и спинку 12, состоящую из частей верхней 13 и нижней 14. Нижняя часть 14 спинки шарнирно соединена с тазовым звеном 11 с возможностью вращения в поперечной плоскости. Указанное вращение осуществляется с помощью электропривода 15, выполненного в виде электромеханического актуатора.
[0045] Верхняя часть 13 спинки шарнирно соединена с нижней частью 14 с возможностью вращения в сагиттальной плоскости. Указанное вращение осуществляется с помощью электропривода 16, выполненного в виде электромеханического актуатора.
[0046] Тазовое звено 11 крепится к нижней части торса пациента с помощью лямок (на чертеже на показаны). Спинка 12 крепится к торсу пациента также с помощью лямок (на чертеже на показаны). Крепиться могут как одна, так и обе части спинки.
[0047] Правое звено 17 бедра и левое звено 18 бедра шарнирно соединены с тазовым звеном 11 с возможностью вращения в сагиттальной плоскости. Указанное вращение осуществляется с помощью электроприводов 19 и 20 вращения, соответственно.
[0048] Правое звено 21 голени шарнирно соединено с правым звеном 17 бедра с возможностью вращения в сагиттальной плоскости, а левое звено 22 голени шарнирно соединено с левым звеном 18 бедра с возможностью вращения в сагиттальной плоскости. Данные движения осуществляются с помощью электроприводов 23 и 24 вращения, соответственно.
[0049] На правом 21 звене голени в области правого коленного сустава (коленного шарнира) расположена контактная площадка 25. На левом 22 звене голени в области левого коленного сустава (коленного шарнира) расположена контактная площадка 26.
[0050] Правое звено 27 стопы установлено на правом звене 21 голени, а левое звено 28 стопы установлено на левом звене 22 голени. На правом звене 27 стопы расположена контактная площадка 29, а на левом звене 28 стопы расположена контактная площадка 30.
[0051] Звенья 27 и 28 стоп могут быть закреплены на звеньях 21 и 22 голеней в одном из фиксированных положений или могут иметь с последними упругую связь для самоустановки в процессе движения. В данном конкретном примере исполнения правое звено 27 стопы шарнирно установлено на правом звене 21 голени с возможностью вращения в сагиттальной плоскости, а левое звено 28 стопы шарнирно установлено на левом звене 22 голени также с возможностью вращения в сагиттальной плоскости. Данные движения осуществляются с помощью электроприводов 31 и 32 вращения, соответственно.
[0052] Правое звено 33 плеча и левое звено 34 плеча шарнирно установлены на верхней части 13 спинки с возможностью вращения в сагиттальной плоскости. Данные движения осуществляются с помощью электроприводов 35 и 36 вращения, соответственно.
[0053] Правое звено 37 предплечья шарнирно соединено с правым звеном 33 плеча с возможностью вращения в сагиттальной плоскости, а левое звено 38 предплечья шарнирно соединено с левым звеном 34 плеча с возможностью вращения в сагиттальной плоскости. Данные движения осуществляются с помощью электроприводов 39 и 40 вращения, соответственно.
[0054] Правое звено 41 кисти установлено на правом звене 37 предплечья, и левое звено 42 кисти установлено на левом звене 38 предплечья. На правом звене 41 кисти расположена контактная площадка 43, а на левом звене 42 расположена контактная площадка 44.
[0055] Звенья 41 и 42 кистей могут быть закреплены на звеньях 37 и 38 предплечий в одном из фиксированных положений или могут иметь с последними упругую связь для самоустановки в процессе движения. В данном конкретном примере исполнения правое звено 41 кисти шарнирно установлено на правом звене 37 предплечья с возможностью вращения в сагиттальной плоскости, а левое звено 42 кисти шарнирно установлено на левом звене 38 предплечья также с возможностью вращения в сагиттальной плоскости. Данные движения осуществляются с помощью электроприводов 45 и 46 вращения, соответственно.
[0056] Звенья 17 и 18 бедер, звенья 21 и 22 голеней, звенья 27 и 28 стоп, звенья 33 и 34 плеч, звенья предплечий 37 и 38, а также звенья 41 и 42 кистей крепятся к соответствующим частям тела пациента с помощью лямок (на чертежах на показаны).
[0057] Контактные площадки 25 и 26, 29 и 30, 43 и 44 предназначены для взаимодействия с опорной поверхностью, по которой будет перемещаться активный экзоскелет в процессе осуществления реабилитационных мероприятий.
[0058] На спинке 12 расположены первые соединительные элементы 45. Соединительные элементы 45 могут располагаться как на одной, так и на обеих частях спинки 12. В данном примере исполнения устройства реабилитации первые соединительные элементы выполнены в виде стержней шариковых замков.
[0059] В спинке 12 размещена система управления, связанная со всеми электроприводами 15, 16, 19, 20, 23, 24, 31, 32, 35, 36, 39, 40, 45, 46 и источник электропитания системы управления и электроприводов.
[0060] Как показано на фиг. 3 несущая тележка 50 выполнена в виде П-образной рамы 51 на колесах 52. Несущая тележка 50 включает в себя электромеханический манипулятор 53 с траверсой 54, обеспечивающей удержание активного экзоскелета 10 в первом положении и при его перемещении во второе положение. На траверсе 54 расположены вторые соединительные элементы 55, предназначенные для взаимодействия с первыми соединительными элементами активного экзоскелета. В данном примере соединительные элементы 55 выполнены в виде шариковых замков.
[0061] Работа устройства 1 реабилитации пациентов с нарушениями локомоторной и постуральной функций вследствие заболеваний, травм и пороков развития нервной системы и опорно-двигательного аппарата осуществляется следующим образом. В первом (начальном) положении (фиг. 1 и фиг. 2) активный экзоскелет 10 зафиксирован на траверсе 54 электромеханического манипулятора 53 при помощи соединительных элементов 45 и 55 и расположен над скамьей 2. В данном конкретном примере активный экзоскелет 10 принимает сидячую позу с вытянутыми вперед руками. Для специалиста очевидно, что в зависимости от степени нарушений опорно-двигательного аппарата и антропометрических параметров пациента поза и положение активного экзоскелета 10 на несущей тележке 50 может регулироваться.
[0062] Пациента (на чертежах не показан) усаживают на скамью 2 и закрепляют части тела на соответствующих звеньях активного экзоскелета 10. После этого по командам системы управления приводят активный экзоскелет 10 в положение, при котором все контактные площадки 25, 26, 29, 30, 43 и 44 располагаются в одной плоскости (фиг. 7). Далее с помощью электромеханического манипулятора 53 поворачивают и перемещают активный экзоскелет 10 с пациентом во второе положение (фиг. 4), при котором экзоскелет 10 всеми контактными площадками 25, 26, 29, 30, 43, 44 встает на опорную поверхность.
[0063] Разъединяют соединительные элементы 45 и 55, освобождают траверсу 54 и отводят несущую тележку 50. Активный экзоскелет 10 с пациентом остается на опорной поверхности (фиг. 5-7). После этого, по командам системы управления электроприводы 19, 20, 23, 24, 31, 32, 35, 36, 39, 40, 45, 46 приводят в действие соответствующие звенья активного экзоскелета 10, реализуя заданный паттерн движения (фиг. 8). При этом для обеспечения свободного движения звеньев 17 и 18 бедер по командам системы управления электропривод 16 осуществляет относительный поворот верхней 13 и нижней 14 частей спинки в сагиттальной плоскости, а электропривод 15 осуществляет относительный поворот нижней 14 частей спинки и тазового звена 11 в поперечной плоскости.
[0064] Хотя в данном документе были описаны различные стороны осуществления заявленного изобретения, специалистам в данной области техники понятно, что возможны другие подходы к осуществлению данного изобретения. Различные стороны и реализация данного изобретения изложены в настоящем описании в иллюстративных целях и не подразумевают ограничения, причем объем защиты настоящего изобретения указан в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| СПОСОБ ОЦЕНКИ СТЕПЕНИ РЕАБИЛИТАЦИИ С ИСПОЛЬЗОВАНИЕМ АКТИВНОГО ЭКЗОСКЕЛЕТА У ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2695605C2 |
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| ПЕДАЛЬНОЕ УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И/ИЛИ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ | 2004 |
|
RU2268026C2 |
| СПОСОБ ФОРМИРОВАНИЯ УСТОЙЧИВОСТИ В ПОЗЕ СИДЯ У ПАЦИЕНТОВ СО СТАТОДИНАМИЧЕСКИМИ НАРУШЕНИЯМИ | 2010 |
|
RU2448670C1 |
| ГОЛЕННОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2635760C1 |
| СТОПА ЭКЗОСКЕЛЕТА | 2016 |
|
RU2644547C2 |

Изобретение относится к медицине, а именно к устройствам реабилитации пациентов с нарушениями опорно-двигательного аппарата. Устройство содержит активный экзоскелет и несущую тележку. Экзоскелет включает в себя тазовое звено, спинку, правое звено бедра, левое звено бедра, правое звено голени, левое звено голени, правое звено стопы, левое звено стопы, правое звено плеча, левое звено плеча, правое звено предплечья, левое звено предплечья, правое звено кисти, левое звено кисти, правую контактную площадку, левую контактную площадку, электроприводы, систему управления, связанную с электроприводами, и первые соединительные элементы, расположенные на спинке. Несущая тележка выполнена в виде П-образной рамы на колесах, включающей в себя электромеханический манипулятор с траверсой, имеющей вторые соединительные элементы, предназначенные для взаимодействия с первыми соединительными элементами активного экзоскелета. Электромеханический манипулятор выполнен с возможностью фиксации активного экзоскелета в первом положении и с возможностью перемещения активного экзоскелета из первого положения на опорную поверхность во второе положение. Достигается возможность автоматизировать процесс реабилитации и исключить риск получения травм. 2 з.п. ф-лы, 8 ил.
1. Устройство реабилитации пациентов с нарушениями опорно-двигательного аппарата, содержащее
активный экзоскелет, включающий в себя
тазовое звено, предназначенное для крепления на нижней части торса пациента,
спинку, предназначенную для крепления на торсе пациента и состоящую из двух частей, нижняя из которых соединена с тазовым звеном с возможностью вращения в поперечной плоскости, а верхняя соединена с нижней частью с возможностью вращения в сагиттальной плоскости,
правое звено бедра и левое звено бедра, каждое из которых установлено на тазовом звене с возможностью вращения в сагиттальной плоскости и предназначено для крепления на соответствующем бедре пациента,
правое звено голени и левое звено голени, каждое из которых установлено на соответствующем звене бедра с возможностью вращения в сагиттальной плоскости и предназначено для крепления на соответствующей голени пациента,
предназначенные для крепления на соответствующих стопах пациента правое звено стопы и левое звено стопы, каждое из которых установлено на соответствующем звене голени и имеет в носовой части контактную площадку, предназначенную для взаимодействия с опорной поверхностью,
правое звено плеча и левое звено плеча, каждое из которых установлено на верхней части спинки с возможностью вращения в сагиттальной плоскости и предназначено для крепления на соответствующем плече пациента,
правое звено предплечья и левое звено предплечья, каждое из которых установлено на соответствующем звене плеча с возможностью вращения в сагиттальной плоскости и предназначено для крепления на соответствующем предплечье пациента,
предназначенные для крепления на соответствующих кистях пациента правое и левое звено кисти, каждое из которых установлено на соответствующем звене предплечья и имеет контактную площадку, предназначенную для взаимодействия с опорной поверхностью,
правую контактную площадку и левую контактную площадку, каждая из которых расположена в области соответствующего коленного сустава и предназначенные для взаимодействия с опорной поверхностью,
первые соединительные элементы, расположенные на спинке,
электроприводы, предназначенные для осуществления относительного движения между верхней и нижней частями спинки, между нижней частью спинки и тазовым звеном, между тазовым звеном и звеньями бедра, между звеньями бедра и голени, между верхней частью спинки и звеньями плеча, между звеньями плеча и предплечья,
а также систему управления, связанную с электроприводами,
и несущую тележку, выполненную в виде П-образной рамы на колесах, включающую в себя электромеханический манипулятор с траверсой, имеющей вторые соединительные элементы, предназначенные для взаимодействия с первыми соединительными элементами активного экзоскелета,
причем электромеханический манипулятор выполнен с возможностью фиксации активного экзоскелета в первом положении и с возможностью перемещения активного экзоскелета из первого положения на опорную поверхность во второе положение.
2. Устройство реабилитации по п. 1, отличающееся тем, что каждое звено стопы установлено на соответствующем звене голени с возможностью вращения (поворота) в сагиттальной плоскости,
а устройство снабжено дополнительными электроприводами активного экзоскелета, предназначенными для осуществления относительного движения между звеньями стопы и голени.
3. Устройство реабилитации по п. 1, отличающееся тем, что каждое звено кисти установлено на соответствующем звене предплечья с возможностью вращения (поворота) в сагиттальной плоскости,
а устройство снабжено дополнительными электроприводами активного экзоскелета, предназначенными для осуществления относительного движения между звеньями кисти и предплечья.
| US 20190015273 A1, 17.01.2019 | |||
| ДОЗАТОР ЖИДКИХ ФЛОТАЦИОННЫХ РЕАГЕНТОВ | 0 |
|
SU192106A1 |
| US 20190247265 A1, 15.08.2019 | |||
| Способ ультразвуковой сварки полимерных материалов | 1977 |
|
SU713692A1 |
| US 9554964 B1, 31.01.2017 | |||
| US 20140196757 A1, 17.07.2014. | |||

