Изобретение относится к относится к медицинской технике, в частности к способам задания желаемых траекторий движения экзоскелета, устройствам содействия ходьбе пользователей и способам управления устройствами содействия ходьбе в заранее предопределенных режимах движения пользователей с нарушением функций опорно-двигательного аппарата, с ограниченной подвижностью или полной неподвижностью нижних конечностей при нормальном функционировании верхних конечностей и верхней части корпуса. Изобретение обеспечивает возможность ходьбы пользователя с нарушением функций опорно-двигательного аппарата по горизонтальной и наклонной опорной поверхности, а также по лестничным маршам и переход через препятствия с паттерном ходьбы, аналогичным паттерну ходьбы здорового человека, а также может применяться при проведении реабилитационно-восстановительных процедур.
Известен способ задания желаемых траекторий движения экзоскелета для передвижения пользователя с нарушением функций опорно-двигательного аппарата, не имеющего возможности к самостоятельному передвижению ввиду ограниченной подвижности нижних конечностей, в котором управляющие сигналы на приводы экзоскелета формируются согласно показаниям датчиков силы, установленным на элементах крепления моторизованного экзоскелета к ногам пользователя [патент США US 7731670 В2, опубл. 2010].
Данный способ невозможно применить для пользователей с полной неподвижностью нижних конечностей например, для пользователей - параплегиков в связи с невозможностью создания ими мышечных усилий в ногах, а для пользователей с ограниченной подвижностью нижних конечностей невозможно обеспечить задание желаемого паттерна ходьбы аналогичного паттерну ходьбы человека без нарушения функций опорно-двигательного аппарата.
Наиболее близким к предлагаемому изобретению в отношении способа задания желаемых траекторий движения экзоскелета для передвижения в сагиттальной плоскости пользователя с нарушением функций опорно-двигательного аппарата является способ задания желаемых траекторий движения экзоскелета в декартовой системе координат для передвижения в сагиттальной плоскости в заранее предопределенных режимах движения пользователя с нарушением функций опорно-двигательного аппарата при помощи экзоскелета, содержащего корпус, снабженный креплениями для присоединения к торсу пользователя, левую и правую ножные опоры, каждая из которых содержит шарнирно соединенные соответствующие бедренное и голенное звенья и стопу, снабженные соответствующими креплениями для присоединения к ногам пользователя и выполненные с возможностью вращения в сагиттальной плоскости, при этом верхние концы соответствующих бедренных звеньев шарнирно соединены с левым и, соответственно, правым концами корпуса экзоскелета, при этом тазобедренные и коленные шарнирные соединения снабжены датчиками относительного углового поворота смежных звеньев и выполнены моторизованными, а также бортовой контроллер, соединенный с датчиками относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом согласно данному способу при помощи системы захвата движения, включающей последовательно соединенные блок измерительных устройств для определения и передачи данных с параметрами захватываемого движения, блок обработки данных с параметрами захватываемого движения и блок хранения параметров захватываемого движения, выход которого соединен с выходом системы захвата движения, обеспечивают измерение декартовых координат заранее выбранных точек тела человека в процессе его движения [А.П. Алисейчик, И.А. Орлов, В.Е. Павловский, В.В. Павловский, А.К. Платонов. Механика и управление экзоскелетами нижних конечностей для нейрореабилитации спинальных больных. - CD-ROM «XI Всероссийский съезд по фундаментальным проблемам теоретической и прикладной механики», Казань, 20-24 августа 2015 года. С. 133-135].
В данном способе походка пользователя формируется в виде набора функций времени межзвенных углов экзоскелета, что не позволяет менять параметры движения - длину шага, высоту подъема ноги и темп ходьбы.
Техническим результатом, на достижение которого направлен предлагаемый способ, является вычисление зависящих от времени параметров траектории желаемого движения, позволяющих однозначно задавать желаемую траекторию движения экзоскелета в сагиттальной плоскости декартовой системе координат для передвижения пользователя с нарушением функций опорно-двигательного аппарата с походкой, близкой к походке человека без нарушения функций опорно-двигательного аппарата, а также менять параметры шага (длину шага, высоту подъема ноги и темп ходьбы).
Известно устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения, содержащее экзоскелет, имеющий один или несколько исполнительных механизмов, связанных с различными звеньями экзоскелета, соединенными с соответствующими частями тела пользователя, при этом устройство обеспечивает: прием входных данных, указывающих на желаемое движение последовательности; получение из памяти запрограммированных движений данных, обеспечивающих выполнение одной или более последовательных инструкций, требуемых для осуществления относительных перемещений исполнительных механизмов для выполнения вышеуказанных инструкций и перемещение одного или более звеньев экзоскелета в соответствии с относительными движениями привода для каждой инструкции [заявка РСТ WO 2011002306 А1, опубл. 2011].
В данном устройстве входной сигнал, подаваемый на приводы и задающий движение экзоскелета, носит ступенчатый характер, что сказывается на плавности ходьбы в экзоскелете и не позволяет формировать управляющие воздействия на приводы экзоскелета, обеспечивающие паттерн ходьбы близкой к естественной, что отрицательно сказываются на эргономических характеристиках устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата.
Наиболее близким к предлагаемому изобретению в отношении устройства является устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения, содержащее экзоскелет нижних конечностей, экзоскелет нижних конечностей, при этом экзоскелет включает тазовое звено, левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например, электроприводами, а также бортовой контроллер, соединенный с датчиками относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом стопы снабжены датчиками реакции опоры, интегрированными в блок измерений реакций опоры и смонтированными в пятке и носке стоп, кроме того, устройство содействия ходьбе содержит левую и правую ручные опоры и устройство управления, включающее блок вычисления желаемых углов и угловых скоростей экзоскелета, блок оценки внешнего момента и блок вычисления и формирования управляющих сигналов на приводы экзоскелета, подключенный к управляющим входам соответствующих приводов, при этом вход блока вычисления желаемых углов и угловых скоростей экзоскелета соединен с первым входом устройства управления, третий вход которого соединен с выходом блока измерения текущих углов и угловых скоростей [патент RU 2364385, опубл. 2009]. Данное устройство имеет следующие недостатки:
- задающими сигналами на приводы экзоскелета являются сигналы с электромиографических датчиков, снимаемые со здоровой конечности, поэтому применение данного устройства и способа управления им пользователями с отсутствием мышечной активности (полный парез), в том числе, и параплегиками невозможны;
- сигналы с этих сенсоров не обеспечивают пропорциональность по углам в шарнирах;
- входной сигнал, подаваемый на приводы и задающий движение экзоскелета, носит ступенчатый характер, что сказывается на плавности ходьбы в экзоскелете;
- при формировании управляющего сигнала на приводы экзоскелета не учитывается влияние усталости мышц пользователя на величину миографического сигнала, что сказывается на точности движения экзоскелета;
- математическая модель пользователя с надетым на него экзоскелетом, используемая в блоке формирования управляющих сигналов при формировании управляющих сигналов на приводы экзоскелета, не учитывает влияние момента, создаваемого за счет колебаний торса пользователя, масса которого составляет приблизительно половину веса тела.
Указанные факторы ограничивают функциональные возможности устройства и не позволяют формировать управляющие воздействия на приводы экзоскелета, обеспечивающие паттерн ходьбы близкой к естественной, что отрицательно сказываются на эргономических характеристиках устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата.
Наиболее близким к предлагаемому изобретению в отношении способа управления предлагаемым устройством содействия ходьбе является способ управления устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения, содержащим экзоскелет нижних конечностей, включающим тазовое звено, левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например, электроприводами, а также бортовой контроллер, соединенный с измерителями относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом стопы снабжены датчиками реакции опоры, интегрированными в блок измерений реакций опоры и смонтированными в пятке и носке стоп, кроме того, устройство содействия ходьбе содержит левую и правую ручные опоры и устройство управления, включающее блок вычисления желаемых углов и угловых скоростей экзоскелета, блок оценки внешнего момента и блок вычисления и формирования управляющих сигналов на приводы экзоскелета, подключенный к управляющим входам соответствующих приводов, при этом вход блока вычисления желаемых углов и угловых скоростей экзоскелета соединен с первым входом устройства управления, третий вход которого соединен с выходом блока измерения текущих углов и угловых скоростей, при этом согласно данному способу измеряют текущие углы и угловые скорости в тазобедренных и коленных соединениях и силы реакции опор [патент RU 2364385, опубл. 2009].
Данный способ, используемый для управления вышеуказанным устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата, обуславливает ограничение функциональных возможностей и не позволяет обеспечить высокие эргономические характеристики устройства, так как его невозможно применить для оказания содействия в ходьбе пользователям с полной утратой функций опорно-двигательного аппарата, а при использовании его пользователями с частичной утратой указанных функций он не может обеспечить пользователю паттерн ходьбы, близкий к естественному.
Заявленные технические результаты по устройству и способу
Техническим результатом, на достижение которого направлено данное изобретение в отношении устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата и способа управления этим устройством, является расширение функциональных возможностей и улучшение эргономических характеристик устройства за счет обеспечения возможности управления движением экзоскелета с возможностью задания правильного (близкого к паттерну ходьбы человека без нарушения функций опорно-двигательного аппарата) паттерна ходьбы для пользователей с полной или частичной потерей двигательной активности мышц и задание, возможность задания и изменения с пульта управления при движении по желаемым траекториям таких параметров шага как длина, высота подъема ноги и темп ходьбы, а также повышение точности движения экзоскелета по этим траекториям.
Другими техническими результатами, на достижение которых направлено данное изобретение в части реализации устройства являются: - обеспечение возможности использования устройства для содействия ходьбе пользователей, как с полной, так и с частичной параплегией;
- обеспечение возможности восстановления правильного паттерна ходьбы пользователя с возможностью выбора различных параметров ходьбы (длина, высота и темп шага) - обеспечения возможности различных режимов работы устройства - движение по ровной, наклонной, ступенчатой поверхностям, а также перешагивание через препятствие, ходьба на месте;
- обеспечение возможности плавного, устойчивого движения по желаемым траекториям тазобедренных и голеностопных шарниров, задаваемых в декартовых координатах.
Для достижения указанного технического результата в отношении способа задания желаемых траекторий движения экзоскелета для передвижения в сагиттальной плоскости пользователя с нарушением функций опорно-двигательного аппарата, согласно которому при помощи системы захвата движения, включающей последовательно соединенные блок измерительных устройств для определения и передачи данных с параметрами захватываемого движения, блок обработки данных с параметрами захватываемого движения и блок хранения параметров захватываемого движения, выход которого соединен с выходом системы захвата движения, обеспечивают измерение декартовых координат заранее выбранных точек тела человека в процессе его движения в качестве человека, декартовые координаты заранее выбранных точек тела которого измеряют, используют человека без нарушения функций опорно-двигательного аппарата, а в качестве заранее выбранных точек его тела, декартовые координаты которых измеряют, используя точки пересечения лежащих во фронтальной плоскости оси тазобедренного сустава и осей голеностопных суставов с сагиттальной плоскостью, при этом указанные декартовые координаты измеряют в зависимости от времени в виде траекторий по осям декартовой системы координат указанной сагиттальной плоскости при движении вышеупомянутого человека для каждого из заранее предопределенных режимов движения, и сохраняют в блоке хранения параметров захватываемого движения в виде массивов данных для каждой измеренной траектории, при этом ось ординат указанной системы координат сагиттальной плоскости направлена вертикально, а ось абсцисс - по курсу передвижения экзоскелета, а далее в блоке обработки параметров захватываемого движения, вход которого подключен к выходу системы захвата движения, осуществляют обработку параметров захватываемого движения, вычисляя на основе вышеуказанных являющихся заданными таблично функциями времени массивов декартовых координат, параметры и/или коэффициенты интерполяции для каждой из заранее выбранных гладких интерполирующих вышеуказанные траектории аналитических функций, дифференцируемых не менее двух раз, например, сплайнов, в том числе, и кубических сплайнов, при этом вычисленные параметры и/или коэффициенты интерполяции сохраняют в подключенном к выходу блока обработки параметров захватываемого движения блоке хранения параметров и/или коэффициентов интерполяции.
При этом в качестве заранее предопределенных режимов движения человека без нарушения функций опорно-двигательного аппарата использованы режимы: «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
Для достижения указанных технических результатов в отношении известного устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата содержащего экзоскелет нижних конечностей, включающий тазовое звено и левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например, электроприводами, а также бортовой контроллер, соединенный с измерителями относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом стопы снабжены датчиками реакции опоры, интегрированными в блок измерений реакций опоры и смонтированными в пятке и носке стоп, кроме того, устройство содействия ходьбе содержит левую и правую ручные опоры и устройство управления, включающее блок вычисления желаемых углов и угловых скоростей экзоскелета, блок оценки внешнего момента и блок вычисления и формирования управляющих сигналов на приводы экзоскелета, подключенный к управляющим входам соответствующих приводов, при этом вход блока вычисления желаемых углов и угловых скоростей экзоскелета соединен с первым входом устройства управления, третий вход которого соединен с выходом блока измерения текущих углов и угловых скоростей, оно дополнено внешним компьютером ассистента-специалиста, выполненным с предоставлением ассистенту-специалисту возможности ввода в бортовой контроллер экзоскелета отношения длины голени к длине бедра, длины голени и масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета, выбора режима движения и регулирования таких параметров движения как длина шага, высота подъема ноги и темп ходьбы, пультом управления, выполненным с предоставлением пользователю возможности выбора режима движения и регулирования таких параметров движения как длина шага, высота подъема ноги и темп ходьбы, блоком измерения токов в электроприводах, содержащим первый, второй, третий, четвертый датчики тока соответственно первого, второго, третьего и четвертого электроприводов, блоком формирования желаемых траекторий в декартовой системе координат, выполненным с возможностью ввода в него и хранения в нем являющихся функциями времени параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат для заранее предопределенных режимов движения, первый вход которого соединен с выходом пульта управления, а второй вход - с выходом блока измерения реакций опоры, первый выход - соединен с первым входом устройства управления, а второй выход выполнен с возможностью подключения ко входу системы определения параметров желаемых траекторий движения в декартовой системе координат, выход которой выполнен с возможностью подключения к третьему входу блока формирования желаемых траекторий в декартовой системе координат, четвертый вход которого выполнен с возможностью подключения к выходу внешнего компьютера ассистента-специалиста, при этом устройство управления дополнено блоком формирования желаемых ускорений движения по траекториям в декартовой системе координат, первый вход которого подключен к первому входу устройства управления, блоком вычисления желаемых угловых ускорений, первый вход которого подключен к выходу блока формирования желаемых ускорений движения по траекториям, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления угловых ускорений на приводы экзоскелета, при этом первый вход блока вычисления угловых ускорений на приводы экзоскелета подключен к выходу блока вычисления желаемых угловых ускорений, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления вектора текущих декартовых координат экзоскелета, вход которого подключен к третьему входу устройства управления, а выход - ко второму входу блока формирования желаемых ускорений движения по траекториям в декартовой системе координат, блоком оценки углового движения корпуса, вход которого подключен к выходу блока вычисления текущих декартовых координат экзоскелета, а выход - к четвертому входу блока оценки внешнего момента, пятый вход которого через второй вход устройства управления подключен к выходу блока измерений реакций опоры, при этом первый вход блока формирования управляющих сигналов подключен к выходу блока оценки внешнего момента, первый вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, а второй вход - к третьему входу устройства управления, соединенному также с третьим входом блока вычислений угловых ускорений на приводы экзоскелета и ко второму входу блока формирования управляющих сигналов, третий вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, четвертый вход - к четвертому входу устройства управления, соединенному также с третьим входом блока оценки внешнего момента, а выход к выходу устройства управления, подключенному к управляющим входам приводов, снабженных датчиками тока электродвигателей блока измерения тока двигателей, при этом четвертый вход устройства управления подключен к выходу блока измерения токов электродвигателей.
Для достижения указанных технических результатов в отношении способа управления устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения на базе экзоскелета в известном способе управления устройством содействия ходьбе пользователя, содержащим экзоскелет нижних конечностей, включающим тазовое звено, левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например, электроприводами, а также бортовой контроллер, соединенный с измерителями относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом стопы снабжены датчиками реакции опоры, интегрированными в блок измерений реакций опоры и смонтированными в пятке и носке стоп, кроме того, устройство содействия ходьбе содержит левую и правую ручные опоры и устройство управления, включающее блок вычисления желаемых углов и угловых скоростей экзоскелета, блок оценки внешнего момента и блок вычисления и формирования управляющих сигналов на приводы экзоскелета, подключенный к управляющим входам соответствующих приводов, при этом вход блока вычисления желаемых углов и угловых скоростей экзоскелета соединен с первым входом устройства управления, третий вход которого соединен с выходом блока измерения текущих углов и угловых скоростей, при этом согласно данному способу измеряют текущие углы и угловые скорости в тазобедренных и коленных соединениях и силы реакции опор, устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата дополнено внешним компьютером ассистента-специалиста, выполненным с предоставлением ассистенту-специалисту возможности ввода в бортовой контроллер экзоскелета отношения длины голени к длине бедра, длины голени и масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета, выбора режима движения и регулирования таких параметров движения как длина шага, высота подъема ноги и темп ходьбы, пультом управления, выполненным с предоставлением пользователю возможности выбора режима движения и регулирования таких параметров движения как длина шага, высота подъема ноги и темп ходьбы, блоком измерения токов в электроприводах, содержащим первый, второй, третий, четвертый датчики тока соответственно первого, второго, третьего и четвертого электроприводов, блоком формирования желаемых траекторий в декартовой системе координат, выполненным с возможностью ввода в него и хранения в нем являющихся функциями времени параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат для заранее предопределенных режимов движения, первый вход которого соединен с выходом пульта управления, а второй вход - с выходом блока измерения реакций опоры, первый выход - соединен с первым входом устройства управления, а второй выход выполнен с возможностью подключения к входу системы определения параметров желаемых траекторий движения в декартовой системе координат, выход которой выполнен с возможностью подключения к третьему входу блока формирования желаемых траекторий в декартовой системе координат, четвертый вход которого выполнен с возможностью подключения к выходу внешнего компьютера ассистента-специалиста, при этом устройство управления дополнено блоком формирования желаемых ускорений движения по траекториям в декартовой системе координат, первый вход которого подключен к первому входу устройства управления, блоком вычисления желаемых угловых ускорений, первый вход которого подключен к выходу блока формирования желаемых ускорений движения по траекториям, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления угловых ускорений на приводы экзоскелета, при этом первый вход блока вычисления угловых ускорений на приводы экзоскелета подключен к выходу блока вычисления желаемых угловых ускорений, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления вектора текущих декартовых координат экзоскелета, вход которого подключен к третьему входу устройства управления, а выход - ко второму входу блока формирования желаемых ускорений движения по траекториям в декартовой системе координат, блоком оценки углового движения корпуса, вход которого подключен к выходу блока вычисления текущих декартовых координат экзоскелета, а выход - к четвертому входу блока оценки внешнего момента, пятый вход которого через второй вход устройства управления подключен к выходу блока измерений реакций опоры, при этом первый вход блока формирования управляющих сигналов подключен к выходу блока оценки внешнего момента, первый вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, а второй вход - к третьему входу устройства управления, соединенному также с третьим входом блока вычислений угловых ускорений на приводы экзоскелета и ко второму входу блока формирования управляющих сигналов, третий вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, четвертый вход - к четвертому входу устройства управления, соединенному также с третьим входом блока оценки внешнего момента, а выход к выходу устройства управления, подключенному к управляющим входам приводов, снабженных датчиками тока электродвигателей блока измерения тока двигателей, при этом четвертый вход устройства управления подключен к выходу блока измерения токов электродвигателей, при этом согласно предлагаемому способу управления устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата измеряют отношение длины голеней к длине бедер, длины голеней и осуществляют прямое или косвенное измерение масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета и через внешний компьютер ассистента-специалиста и четвертый вход блока формирования желаемых траекторий в декартовой системе координат бортового контроллера вводят в блок формирования желаемых траекторий в декартовой системе координат бортового контроллера и через него в систему определения параметров желаемых траекторий движения в декартовой системе координат такие измеренные параметры пользователя, как длина голеней, отношение длины голеней к длине бедер и масс-инерционные характеристики сегментов тела пользователя с надетым на него экзоскелетом, и согласно заданному отношению длины голеней к длине бедер пользователя осуществляют прием данных от системы определения параметров желаемых траекторий движения в декартовой системе координат, которые заносят в блок формирования желаемых траекторий в декартовой системе координат в виде массивов параметров (коэффициентов) интерполяции интерполирующих функций, полученных для человека без нарушения функций опорно-двигательного аппарата при его передвижении в каждом из заранее предопределенных режимов, задают с внешнего компьютера ассистента-специалиста или с пульта управления режим движения пользователя из ряда заранее предопределенных режимов, вычисляют численные значения интерполирующих функций и масштабируют их путем умножения на коэффициент равный отношению длина голени пользователя с нарушением функций опорно-двигательного аппарата к длине голени человека без нарушения функций опорно-двигательного аппарата, задают с пульта управления или с внешнего компьютера ассистента-специалиста желаемые параметры шага пользователя путем масштабирования соответствующих пользователю интерполированных траекторий, представленных в декартовой системе координат на соответствующие коэффициенты, также для изменения времени переноса ноги (темпа ходьбы) - путем масштабирования оси времени этих функций, причем масштабирование выполняют как по каждой отдельной взятой координате, так и по их комбинациям, в блоке вычисления текущих декартовых координат экзоскелета вычисляют вектор текущих декартовых координат экзоскелета, на основе полученных измерений углов и угловых скоростей в тазобедренных и коленных соединениях, в блоке формирования желаемых траекторий в декартовой системе координат формируют желаемые траектории движения тазобедренного и голеностопных шарниров экзоскелета в зависимости от времени, путем вычисления на основе хранящихся и являющихся функциями времени массивов значений параметров (коэффициентов) численных значений интерполирующих функций, записанных в декартовой системе координат; вычисляют вектор желаемых углов и угловых скоростей на основе ранее вычисленных значений вектора желаемых траекторий и их первых производных, в блоке формирования желаемых ускорений движения по траекториям в декартовой системе координат вычисляют вектор желаемых ускорений движения по траектории в декартовой системе координат на основе ранее вычисленных значений вектора положения и скорости в декартовой системе координат и вектора желаемых траекторий и их первых и вторых производных, в блоке формирования желаемых углов и угловых скоростей вычисляют вектор желаемых угловых ускорений на основе вектора желаемых ускорений движения по траектории в декартовой системе координат и вектора желаемых углов и угловых скоростей, в блоке вычисления желаемых угловых ускорений на приводы экзоскелета вычисляют вектор желаемых угловых ускорений на приводы, на основе ранее вычисленных вектора желаемых угловых ускорений, вектора желаемых углов и угловых скоростей, вектора текущих значений углов и угловых скоростей в шарнирных соединениях, в блоке оценки внешнего момента вычисляют вектор внешнего момента на основе ранее вычисленных вектора желаемых угловых ускорений на приводы, вектора текущих значений углов и угловых скоростей в шарнирных соединениях, вектора реакции в опорах, измеренного вектора токов приводов экзоскелета и с учетом масс-инерционных характеристик сегментов тела пользователя с надетым на него экзоскелетом, а вектор управляющих сигналов на приводы экзоскелета вычисляют и формируют в блоке формирования управляющих сигналов на приводы экзоскелета на основе вычисленных ранее вектора текущих значений углов, вектора внешнего момента и измеренных вектора текущих значений углов и угловых скоростей в шарнирных соединениях, вектора токов приводов экзоскелета.
При этом в качестве заранее предопределенных режимов движения экзоскелета в устройстве содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата и способе управления этим устройством, использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
При этом блок формирования желаемых траекторий движения в декартовой системе координат и устройство управления реализованы программно в бортовом контроллере экзоскелета.
На фиг. 1 приведен внешний вид устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата, на фиг. 2 - кинематическая схема этого устройства, на фиг. 3 - функциональная схема системы определения параметров желаемых траекторий движения экзоскелета в декартовой системе координат, а на фиг. 4 - функциональная схема устройства содействия ходьбе пользователя.
На фиг. 5-9 приведены траектории движения в сагиттальной плоскости некоторых точек нижних конечностей человека без нарушения функции опорно-двигательного аппарата в декартовой системе координат, экспериментально полученные с системы видеозахвата движения Vicon.
На фиг. 5 показаны траектории движения в декартовой системе координат тазобедренного, коленного и голеностопного суставов и пальцев переносной ноги, а на фиг. 6 - тазобедренного, коленного и голеностопного суставов и пальцев опорной ноги.
На фиг. 7 приведены траектории движения в декартовой системе координат тазобедренного и голеностопного суставов переносной ноги для исходной длины шага (показана штриховой линией), и траектории с длиной шага, уменьшенной на 30% (показана сплошной линией).
На фиг. 8 показаны опорная траектория (сплошная линия) переноса ноги по оси подъема ноги и траектория ускоренного (штриховая линия) на 30% переноса ноги, на фиг. 9 показаны опорная траектория переноса ноги по оси продольного перемещения ноги и траектория ускоренного на 30% переноса ноги.
На фиг 1-9 обозначены:
1 - экзоскелет нижних конечностей;
2 - тазовое звено;
3 и 4 - левая и соответственно правая ножные опоры;
5 и 6 - левое и соответственно правое бедренные звенья;
7 и 8 - левое и соответственно правое голенные звенья;
9 и 10 - левая и соответственно правая стопы;
11 - левое тазобедренное шарнирное соединение;
12 - левое коленное шарнирное соединение;
13 - левое голеностопное шарнирное соединение;
14 - правое тазобедренное шарнирное соединение;
15 - правое коленное шарнирное соединение;
16 - правое голеностопное шарнирное соединение;
17 - измеритель относительного углового перемещения левого бедренного звена;
18 - измеритель относительного углового перемещения левого голенного звена;
19 - второй выход блока 41 формирования желаемых траекторий в декартовой системе координат;
20 - измеритель относительного углового перемещения правого бедренного звена;
21 - измеритель относительного углового перемещения правого голенного звена;
22 - третий выход блока 41 формирования желаемых траекторий в декартовой системе координат;
23 - привод левого тазобедренного шарнирного соединения;
24 - привод правого тазобедренного шарнирного соединения;
25 - привод левого коленного шарнирного соединения;
26 - привод правого коленного шарнирного соединения;
27, 28, 29 и 30 - первый, второй, третий и соответственно четвертый
силовые датчики реакции опоры;
31- блок измерений реакций опоры;
32 - пульт управления;
33 и 34 - левая и соответственно правая ручные опоры;
35 - устройство управления;
36 - блок вычисления желаемых углов и угловых скоростей экзоскелета;
37 - вход блока 36 вычисления желаемых углов и угловых скоростей экзоскелета;
38 - первый вход устройства 35 управления;
39 - третий вход устройства 35 управления;
40 - блок оценки внешнего момента;
41 - блок формирования желаемых траекторий в декартовой системе координат;
42 - первый вход блока 41 формирования желаемых траекторий в декартовой системе координат;
43 - система определения параметров желаемых траекторий движения в декартовой системе координат;
44 - блок формирования желаемых ускорений движения по траекториям в декартовой системе координат;
45 - первый вход блока 44 формирования желаемых ускорений движения по траекториям в декартовой системе координат;
46 - блок вычисления желаемых угловых ускорений;
47 - первый вход блока 46 вычисления желаемых угловых ускорений;
48 - блок вычисления желаемых угловых ускорений на приводы экзоскелета;
49 и 50 - первый и соответственно второй входы блока 48 вычисления желаемых угловых ускорений на приводы экзоскелета;
51 - блок вычисления вектора текущих декартовых координат экзоскелета;
52 - блок формирования управляющих сигналов на приводы экзоскелета;
53 - второй вход блок 41 формирования желаемых траекторий в декартовой системе координат;
54 - второй вход блока 46 вычисления желаемых угловых ускорений;
55 - второй вход блока 44 формирования желаемых ускорений движения по траекториям в декартовой системе координат;
56 - первый вход блока 52 формирования управляющих сигналов на приводы экзоскелета;
57 и 58 - первый и соответственно второй входы блока 40 оценки внешнего момента;
59 - третий вход блока 48 вычислений угловых ускорений на приводы экзоскелета;
60, 61 и 62 - второй, третий и соответственно четвертый входы блока 52 формирования управляющих сигналов на приводы экзоскелета;
63 - четвертый вход устройства 35 управления;
64 - третий вход блока 40 оценки внешнего момента;
65 - блок измерения тока электроприводов;
66, 67, 68 и 69 - первый, второй, третий и соответственно четвертый 69 датчики тока первого 23, второго 24, третьего 25 и соответственно четвертого 26 электроприводов;
70 - блок измерения текущих углов и угловых скоростей;
71 - блок оценки углового движения корпуса пользователя;
72 - вход блока оценки углового движения корпуса пользователя;
73 - четвертый вход блока 40 оценки внешнего момента;
74 - пятый вход блока 40 оценки внешнего момента;
75 - пятый вход устройства 35 управления;
76 - блок хранения параметров и/или коэффициентов интерполяции желаемых траекторий движения экзоскелета в декартовой системе координат;
77 - система захвата движения;
78 - блок измерительных устройств для определения и передачи данных с параметрами захватываемого движения;
79 - блок обработки данных с параметрами захватываемого движения;
80 - блок хранения параметров захватываемого движения;
81 - блок обработки параметров захватываемого движения;
82 - рукоятка костыля;
83 - первый выход блока 41 формирования желаемых траекторий в декартовой системе координат;
84 - четвертый вход блока 41 формирования желаемых траекторий в декартовой системе координат;
85 - бортовой контроллер;
86 - внешний компьютер ассистента-специалиста;
87 - контроллер определения желаемых траекторий движения в декартовой системе координат;
88 и 89 - первый и соответственно второй выходы внешнего компьютера 86 ассистента;
90 - шестой вход блока 40 оценки внешнего момента.
Способ задания желаемых траекторий движения экзоскелета в декартовой системе координат для передвижения в сагиттальной плоскости в заранее предопределенных режимах движения пользователя с нарушением функций опорно-двигательного аппарата осуществляется для экзоскелета 1, включающего тазовое 2 звено и левую 3 и правую 4 ножные опоры, каждая из которых состоит из бедренного 5 (6) и голенного 7 (8) звеньев и стоп 9 (10).
При этом смежные звенья 2-5, 5-7, 7-9, 2-6, 6-8 и 8-10 соединены посредством соответствующих шарнирных соединений 11, 12, 13, 14, 15, и 16, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями 17, 18, 20, 21 относительного углового перемещения, интегрированными в блок 70 измерения текущих углов и угловых скоростей, при этом тазобедренные 11 и 14 и коленные 12 и 15 шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами 23, 24 и 25, 26 например, электроприводами, а также бортовой контроллер 85, соединенный с измерителями 17, 18, 20, 21 относительного углового поворота смежных звеньев и управляющими входами приводов 23, 24 и 25, 26 моторизованных соединений.
При этом согласно данному способу при помощи системы 77 захвата движения, включающей последовательно соединенные блок 78 измерительных устройств для определения и передачи данных с параметрами захватываемого движения, блок 79 обработки данных с параметрами захватываемого движения и блок 80 хранения параметров захватываемого движения, выход которого соединен с выходом системы 77 захвата движения, обеспечивают измерение декартовых координат заранее выбранных точек тела человека в процессе его движения, причем систему 77 захвата движения используют в составе системы 43 определения параметров желаемых траекторий в декартовой системе координат, а в качестве человека, декартовые координаты заранее выбранных точек тела которого измеряют, используют человека без нарушения функций опорно-двигательного аппарата, а в качестве заранее выбранных точек его тела, декартовые координаты которых измеряют, используют точки пересечения лежащих во фронтальной плоскости оси тазобедренного сустава и осей голеностопных суставов с сагиттальной плоскостью.
При этом указанные декартовые координаты измеряют в зависимости от времени в виде траекторий по осям декартовой системы координат указанной сагиттальной плоскости при движении вышеупомянутого человека для каждого из заранее предопределенных режимов движения, и сохраняют в блоке 80 хранения параметров захватываемого движения в виде массивов данных для каждой измеренной траектории, при этом ось ординат указанной системы координат сагиттальной плоскости направлена вертикально, а ось абсцисс - по курсу передвижения экзоскелета.
Далее в интегрированном в систему 43 определения параметров желаемых траекторий движения в декартовой системе координат блоке 81 обработки параметров захватываемого движения, вход которого подключен к выходу системы 77 захвата движения, осуществляют обработку параметров и/или коэффициентов интерполяции захватываемого движения, вычисляя на основе вышеуказанных массивов заданных таблично функций времени декартовых координат параметры и/или коэффициенты интерполяции для каждой из заранее выбранных гладких интерполирующих вышеуказанные траектории аналитических функций, дифференцируемых не менее двух раз, например, сплайнов, в том числе, и кубических сплайнов.
При этом вычисленные параметры и/или коэффициенты интерполяции сохраняют в подключенном к выходу блока 81 обработки параметров захватываемого движения и интегрированном в систему 43 определения параметров желаемых траекторий в декартовой системе координат блоке 76 хранения параметров и/или коэффициентов интерполяции желаемых траекторий движения экзоскелета в декартовой системе координат.
При этом указанные измерения, обработку данных полученных в результате этих измерений и хранение результатов обработки этих данных осуществляют для группы людей с различным отношением длины голени к длине бедра, сохраняя при этом данные об указанных отношениях и длине голеней для каждого человека из этой группы.
При этом блок 81 обработки параметров захватываемого движения и блок 76 хранения параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат предпочтительно реализовать программно в контроллере 87 определения желаемых траекторий движения в декартовой системе координат.
При этом в качестве заранее предопределенных режимов движения человека без нарушения функций опорно-двигательного аппарата использованы режимы: «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
Устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения, содержащее экзоскелет 1 нижних конечностей, включает тазовое 2 звено и левую 3 и правую 4 ножные опоры, каждая из которых состоит из бедренного 5 (6) и голенного 7 (8) звеньев и стоп 9(10). При этом смежные звенья 2-5, 5-7, 7-9, 2-6, 6-8 и 8-10 соединены посредством соответствующих шарнирных соединений 11, 12, 13, 14, 15, и 16, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями 17, 18, 20, 21 относительного углового перемещения, интегрированными в блок 70 измерения текущих углов и угловых скоростей.
При этом тазобедренные 11 и 14 и коленные 12 и 15 шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами 23, 24 и 25, 26 например, электроприводами, а также бортовой контроллер 85, соединенный с измерителями 17, 18, 20, 21 относительного углового поворота смежных звеньев и управляющими входами приводов 23, 24 и 25, 26 моторизованных соединений, при этом стопы 9 и 10 снабжены первым 27, вторым 28, третьим 29 и четвертым 30 датчиками реакции опоры, интегрированными в блок 31 измерений реакций опоры и смонтированными в пятке 27, (29) и носке 28, (30) стоп 9 (10).
Кроме того, устройство содействия ходьбе содержит левую 33 и правую 34 ручные опоры и устройство 35 управления, включающее блок 36 вычисления желаемых углов и угловых скоростей экзоскелета 1, блок 40 оценки внешнего момента и блок 52 формирования управляющих сигналов на приводы экзоскелета 1, подключенный к управляющим входам соответствующих приводов, при этом вход 37 блока 36 вычисления желаемых углов и угловых скоростей экзоскелета 1 соединен с первым входом 38 устройства 35 управления, третий вход 39 которого соединен с выходом блока 70 измерения текущих углов и угловых скоростей.
Кроме того, устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата содержит внешний компьютер 86 ассистента-специалиста, выполненный с предоставлением ассистенту-специалисту возможности ввода в бортовой контроллер 85 экзоскелета 1 отношения длины голени к длине бедра, длины голени и масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета, выбора режима движения и регулирования таких параметров движения, как длина шага, высота подъема ноги и темп ходьбы, пульт 32 управления, выполненный с предоставлением пользователю возможности выбора режима движения и регулирования таких параметров движения, как длина шага, высота подъема ноги и темп ходьбы, и блок 65 измерения токов в электроприводах, содержащим первый 66, второй 67, третий 68, четвертый 69 датчики тока соответственно первого 23, второго 24, третьего 25 и четвертого 26 электроприводов.
Кроме того, устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата содержит блок 41 формирования желаемых траекторий в декартовой системе координат, выполненный с возможностью ввода в него и хранения в нем являющихся функциями времени параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат для заранее предопределенных режимов движения, первый вход 42 которого соединен с выходом пульта 32 управления, а второй вход 53 - с выходом блока 31 измерения реакций опоры, первый выход 83 соединен с первым входом 38 устройства 35 управления, а второй выход 19 выполнен с возможностью подключения к входу системы 43 определения параметров желаемых траекторий движения в декартовой системе координат, выход которой выполнен с возможностью подключения к третьему входу 22 блока 41 формирования желаемых траекторий в декартовой системе координат, четвертый вход 84 которого выполнен с возможностью подключения к первому 88 выходу внешнего компьютера 86 ассистента-специалиста, второй выход 89 которого выполнен с возможностью подключения к шестому входу 90 блока 40 оценки внешнего момента.
При этом устройство 35 управления содержит блок 44 формирования желаемых ускорений движения по траекториям в декартовой системе координат, первый вход 45 которого подключен к первому входу 38 устройства 35 управления, блок 46 вычисления желаемых угловых ускорений, первый вход 47 которого подключен к выходу блока 44 формирования желаемых ускорений движения по траекториям, а второй вход 54 - к выходу блока 36 формирования желаемых углов и угловых скоростей, блок 48 вычисления угловых ускорений на приводы экзоскелета 1, первый вход 49 которого подключен к выходу блока 46 вычисления желаемых угловых ускорений, а второй вход 50 - к выходу блока 36 формирования желаемых углов и угловых скоростей, блок 51 вычисления вектора текущих декартовых координат экзоскелета, вход которого подключен к третьему входу 39 устройства 35 управления, а выход ко второму 55 входу блока 44 формирования желаемых ускорений движения по траекториям в декартовой системе координат.
Кроме того, устройство содействия ходьбе содержит блок 71 оценки углового движения корпуса, вход 72 которого подключен к выходу блока 51 вычисления текущих декартовых координат экзоскелета, а выход - к четвертому 73 входу блока 40 оценки внешнего момента, пятый вход 74 которого через второй вход 75 устройства 35 управления подключен к выходу блока 31 измерений реакций опоры.
При этом первый вход 56 блока 52 формирования управляющих сигналов подключен к выходу блока 40 оценки внешнего момента, первый вход 57 которого подключен к выходу блока 48 вычисления угловых ускорений на приводы экзоскелета, а второй вход 58 - к третьему 39 входу устройства 35 управления, соединенному также с третьим входом 59 блока 48 вычислений угловых ускорений на приводы экзоскелета и ко второму 60 входу блока 52 формирования управляющих сигналов, третий вход 61 которого подключен к выходу блока 48 вычисления угловых ускорений на приводы экзоскелета, четвертый вход 62 - к четвертому входу 63 устройства 35 управления, соединенному также с третьим входом 64 блока 40 оценки внешнего момента, а выход - к выходу устройства 35 управления, подключенному к управляющим входам приводов 23, 24, 25, 26, снабженных датчиками 66, 67, 68, 69 тока электродвигателей блока 65 измерения тока двигателей, при этом четвертый 63 вход устройства 35 управления подключен к выходу блока 65 измерения токов электродвигателей.
При этом согласно предлагаемому способу управления вышеописанным устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата измеряют отношение длины голеней к длине бедер, длины голеней и масс-инерционные характеристики сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета и через внешний компьютер 86 ассистента-специалиста и четвертый вход 84 блока 41 формирования желаемых траекторий в декартовой системе координат бортового контроллера 85 вводят в блок 41 формирования желаемых траекторий в декартовой системе координат бортового 85 контроллера и через него в систему 43 определения параметров желаемых траекторий движения в декартовой системе координат такие измеренные параметры пользователя, как длина голеней, отношение длины голеней к длине бедер и масс-инерционные характеристики сегментов тела пользователя с надетым на него экзоскелетом 1, согласно введенному отношению длины голеней к длине бедер пользователя осуществляют выборку данных от системы 43 определения параметров желаемых траекторий движения в декартовой системе координат, которые заносят в блок 41 формирования желаемых траекторий в декартовой системе координат в виде массивов параметров (коэффициентов) интерполяции интерполирующих функций, полученных для человека без нарушения функций опорно-двигательного аппарата при его передвижении в каждом из заранее предопределенных режимов, задают с внешнего компьютера 86 ассистента-специалиста или с пульта 32 управления режим движения пользователя, вычисляют численные значения интерполирующих функций и масштабируют их путем умножения на коэффициент равный отношению длина голени пользователя с нарушением функций опорно-двигательного аппарата к длине голени человека без нарушения функций опорно-двигательного аппарата, задают с пульта 32 управления или с внешнего компьютера 86 ассистента-специалиста желаемые параметры шага пользователя путем масштабирования соответствующих пользователю интерполированных траекторий, представленных в декартовой системе координат на соответствующие коэффициенты, также для изменения времени переноса ноги (темпа ходьбы) - путем масштабирования оси времени этих функций, причем масштабирование выполняют как по каждой отдельной взятой координате, так и по их комбинациям, вычисляют вектор текущих декартовых координат экзоскелета, на основе полученных измерений углов и угловых скоростей в тазобедренных и коленных соединениях; формируют желаемые траектории движения тазобедренного и голеностопных шарниров экзоскелета в зависимости от времени, путем вычисления на основе хранящихся и являющихся функциями времени массивов значений параметров (коэффициентов) численных значений интерполирующих функций, записанных в декартовой системе координат; вычисляют вектор желаемых углов и угловых скоростей на основе ранее вычисленных значений вектора желаемых траекторий и их первых производных; вычисляют вектор желаемых ускорений движения по траектории в декартовой системе координат на основе ранее вычисленных значений вектора положения и скорости в декартовой системе координат и вектора желаемых траекторий и их первых и вторых производных; вычисляют вектор желаемых угловых ускорений на основе вектора желаемых ускорений движения по траектории в декартовой системе координат и вектора желаемых углов и угловых скоростей; вычисляют вектор желаемых угловых ускорений на приводы, на основе ранее вычисленных вектора желаемых угловых ускорений, вектора желаемых углов и угловых скоростей, вектора текущих значений углов и угловых скоростей в шарнирных соединениях; вычисляют вектор внешнего момента на основе ранее вычисленных вектора желаемых угловых ускорений на приводы, вектора текущих значений углов и угловых скоростей в шарнирных соединениях, измеренного вектора токов приводов экзоскелета и с учетом масс-инерционных характеристик сегментов тела пользователя с надетым на него экзоскелетом, а вектор управляющих сигналов на приводы экзоскелета вычисляют и формируют на основе вычисленных ранее вектора текущих значений углов, вектора внешнего момента и измеренных вектора текущих значений углов и угловых скоростей в шарнирных соединениях, вектора токов приводов экзоскелета и вектора реакции в опорах.
При этом в качестве заранее предопределенных режимов движения экзоскелета использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
При этом блок 41 формирования желаемых траекторий движения в декартовой системе координат и устройство 35 управления реализованы программно в бортовом контроллере 85 экзоскелета 1.
Описание принципов использования устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата
Работу устройства содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата можно условно охарактеризовать тремя этапами:
- подготовительным, на котором формируются массивы данных, однозначно характеризующие походку (паттерн ходьбы) в декартовой системе координат человека без нарушения функций опорно-двигательного аппарата для заранее предопределенных режимов движения, являющуюся желаемой траекторией движения в той же самой декартовой системе координат пользователя с нарушением функций опорно-двигательного аппарата для тех же самых заранее предопределенных режимов работы;
- этапом измерений и настройки, на котором осуществляется измерение необходимых геометрических и масс-инерционных характеристик пользователя с нарушением функций опорно-двигательного аппарата и осуществляется ввод измеренных данных в бортовой контроллер экзоскелета, а также задаются (выбираются) режим движения экзоскелета и параметры ходьбы (длина шага, высота подъема ноги, темп ходьбы);
- этапом формирования управляющих воздействий на приводы экзоскелата, на котором осуществляется вычисление сигналов управление и формирование управляющих сигналов на приводы экзоскелета.
Подготовительный этап
Согласно предложенному способу задания желаемых траекторий движения экзоскелета для передвижения в сагиттальной плоскости в заранее предопределенных режимах движения пользователя с нарушением функций опорно-двигательного аппарата выполняют захват движения человека без нарушения функций опорно-двигательного аппарата (фиг. 5, 6), выполняют хранение снятого движения в декартовых координатах, вычисляют и используют параметры и/или коэффициенты интерполяции желаемых траекторий движения в декартовой системе координат в сагиттальной плоскости в тех же самых заранее предопределенных режимах движения человека без нарушения функций опорно-двигательного аппарата. Кроме того, этот человек без нарушения функций опорно-двигательного аппарата должен иметь соотношение длина голени к длине бедра одинаковое с пользователем с нарушением функций опорно-двигательного аппарата. Кроме того, должны быть зафиксированы и длины их голеней.
Для реализации способа задания желаемых траекторий движения экзоскелета используют систему 43 определения параметров желаемых траекторий движения, включающую следующие технические средства: систему 77 захвата движения, содержащую последовательно соединенные блок 78 измерительных устройств для определения и передачи данных с параметрами захватываемого движения, блок 79 обработки данных с параметрами захватываемого движения и блок 80 хранения параметров захватываемого движения, выход которого соединен с выходом системы 77 захвата движения и последовательно соединенные блок 81 обработки параметров захватываемого движения, вход которого соединен с выходом системы 77 захвата движения и блок 76 хранения параметров и/или коэффициентов интерполирующих функций, в котором также сохраняются данные об отношении длины голени к длине бедра человека без нарушения функций опорно-двигательного аппарата и длине его голени.
Таким образом, в блоке 76 накопление и хранение вычисленных параметров и/или коэффициентов интерполяции желаемых траекторий как для группы людей с различными отношениями длины голени к длине бедра, сохраняя при этом данные об указанных отношениях и длине голеней для каждого человека из этой группы, так и для траекторий, соответствующих различным заранее предопределенным режимам движения (ходьба по ровной, наклонной и ступенчатой поверхностям, а также режимы опускания и подъема с опоры).
Предпочтительно, чтобы блок 81 обработки параметров захватываемого движения и блок 76 хранения параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат были бы реализованы программно в контроллере 87 определения желаемых траекторий движения в декартовой системе координат.
При этом в качестве заранее предопределенных режимов движения человека без нарушения функций опорно-двигательного аппарата использованы режимы: «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
Этап измерения и настройки
На этапе измерения и настройки осуществляют измерения и ввод в бортовой контроллер экзоскелета антропометрических и масс-инерционных параметров пользователя с нарушением функций опорно-двигательного аппарата. Данные измерения осуществляются ассистентом-специалистом, который через внешний компьютер 86 вводит их в бортовой контроллер 85 экзоскелета 1.
Так, по измеренному ассистентом-специалистом длины голени и отношению длина голени/длина бедра, которое через четвертый вход 84 блока 41 формирования желаемых траекторий в декартовой системе координат, второй выход 19 указанного блока 41 и вход системы 43 определения параметров желаемых траекторий движения в декартовой системе координат, вводится, а через выход указанной системы 43 осуществляется выборка массива параметров и/или коэффициентов интерполяции желаемых траекторий соответствующих введенному отношению для всех заранее предопределенных режимов движения человека. Затем производится масштабирование траекторий, представленных в декартовой системе координат на коэффициент отношения длин голеней человека без нарушения функций опорно-двигательного аппарата и пользователя с нарушением функций опорно-двигательного аппарата и вычисляются коэффициенты интерполяции желаемых траекторий для пользователя. Полученные коэффициенты однозначно определяют желаемую траекторию движения экзоскелета в сагиттальной плоскости для передвижения в заранее предопределенных режимах движения пользователя с нарушением функций опорно-двигательного аппарата и в дальнейшем используют как опорную в процессе движения экзоскелета.
После задания параметров ходьбы (длина шага, высота подъема ноги, темп ходьбы) выполняется масштабирование соответствующих пользователю интерполированных траекторий, представленных в декартовой системе координат на соответствующие коэффициенты, также для изменения времени переноса ноги (темпа ходьбы) - путем масштабирования оси времени этих функций, причем масштабирование выполняют как по каждой отдельной взятой координате, так и по их комбинациям. Опорные и масштабированные траектории представлены на фигурах 7-9.
Этап формирования управляющих воздействий на приводы экзоскелета
Из литературных источников [Белецкий В.В. Двуногая ходьба. Модельные задачи динамики и управления. М.: Наука, 1984. 268 с. С. 219-220] известно, что динамическая модель экзоскелета с интегрированной и прикрепленной к нему нижней половиной тела пользователя при движении в сагиттальной плоскости, может быть описана уравнениями, учитывающими движение торса пользователя, 
где D - [7×7] матрица описывающая инерцию экзоскелета с интегрированным в него человеком, H - [7×1] вектор кориолисовых и центробежных сил, G-[7×1] вектор гравитационных сил, R(θ) - [7×1] вектор сил реакции опоры стопы опорной ноги, W - [7×4] - некоторая матрица, τе - [4×1] вектор управляющих моментов, развиваемых приводами, τh - [6×1] вектор моментов внешних воздействия, θ,  - [7×1] векторы обобщенных координат, скоростей и ускорений. Вектор θ [7×1] состоит из декартовых координат тазобедренного сустава xpel, ypel, угла наклона корпуса ψ и вектора межзвенных углов
- [7×1] векторы обобщенных координат, скоростей и ускорений. Вектор θ [7×1] состоит из декартовых координат тазобедренного сустава xpel, ypel, угла наклона корпуса ψ и вектора межзвенных углов  в тазобедренном 11 и 14 и коленном 12 и 15 шарнирах опорной и переносной ног.
в тазобедренном 11 и 14 и коленном 12 и 15 шарнирах опорной и переносной ног.
С помощью пульта управления 32 выбирают необходимый режим движения из ряда заранее предопределенных режимов движения. С помощью интегрированных в блок 70 измерения текущих углов и угловых скоростей измерителей относительного углового перемещения 17, 20 и 18, 21 измеряют углы и угловые скорости вращения тазобедренных 11 и 14 и коленных 12 и 15 шарнирных соединений, а с помощью интегрированных в блок 65 измерения тока электродвигателей датчиков 66, 67, 68 и 69 тока - электродвигателей электроприводов 23, 24, 25 и 26 соответственно.
Одновременно с помощью силовых датчиков 27, 28, 29 и 30, интегрированных в блок 31 измерения реакций опоры, снимаются данные о силах реакции опоры в стопах 9 и 10.
Кроме того, по сигналу с пульта 32 управления из блока 76 хранения параметров и/или коэффициентов интерполяции системы 43 определения параметров желаемых траекторий движения в память блока 41 формирования желаемых траекторий в декартовой системе координат заносят параметры и/или коэффициенты интерполяции траекторий движения заранее предопределенных режимов движения человека без нарушения функций опорно-двигательного аппарата с тем же отношением длина голени к длине бедра, что и у пользователя с нарушением указанных функций и о длине голени человека без нарушения указанных функций.
Устройство содействия требует настройки под антропометрические параметры конкретного пользователя - отношение/длина голени/длина бедра и длина голени, а также его масс-габаритные параметры. Эти параметры пользователя ассистент вводит в блок 41 через внешний 86 компьютер ассистента-специалиста. Затем блок 41 получает из блока 43 соответствующий введенным антропометрическим параметрам пользователя набор желаемых траекторий движения для различных режимов движения.
Начало движения экзоскелета и параметры шага задает ассистент с внешнего 86 компьютера и/или пользователь с пульта 32 управления.
В блоке 51 вычисления вектора текущих декартовых координат экзоскелета вычисляют вектор текущих декартовых координат экзоскелета, на основе полученных измерений углов и угловых скоростей в тазобедренных 11 и 14 и коленных 12 и 15 шарнирных соединениях, Связи между двумя голеностопными шарнирами и тазовым шарниром для случая одноопорной ходьбы имеет вид [Белецкий В.В. Двуногая ходьба. Модельные задачи динамики и управления. М.: Наука, 1984. 268 с. С. 16]


где вектор  , который рассматривается как функция времени.
, который рассматривается как функция времени.
В блоке 41 формируют желаемые траектории движения тазобедренного и голеностопных шарниров экзоскелета в зависимости от времени, путем вычисления на основе хранящихся и являющихся функциями времени массивов значений параметров (коэффициентов) численных значений интерполирующих функций  и их первых
и их первых  и вторых
и вторых  производных, записанных в декартовой системе координат.
производных, записанных в декартовой системе координат.
В блоке 36 формирования желаемых углов и угловых скоростей вычисляют вектор желаемых углов и угловых скоростей на основе ранее вычисленных значений вектора желаемых траекторий и их первых производных.
Связи (2), (3) предполагают наличие обратных соотношений [Белецкий В.В. Двуногая ходьба. - М.: Наука, 1984. - 286 с. С. 16]


Использование векторов , , наряду с соотношениями(4), (5) позволяет вычислить желаемые углы  и их первые производные
и их первые производные  по формулам
по формулам


В блоке 44 формирования желаемых ускорений движения по траектории вычисляют вектор желаемых ускорений движения по траектории в декартовой системе координат на основе ранее вычисленных значений вектора положения и скорости в декартовой системе координат и вектора желаемых траекторий и их первых и вторых производных.
Устойчивость движения экзоскелетона по траекториям достигается за счет формирования управления так, чтобы отклонение 6 координат экзоскелетона от желаемой траектории являлось бы убывающей функцией времени, асимптотически стремящейся к нулю (например, в виде  , λ1, λ2<0).
, λ1, λ2<0).
Определяя отсюда вектор Y после двойного дифференцирования, получаем желаемую вторую производную

обеспечивающую устойчивое движение по траекториям в тазобедренном и голеностопных шарнирах. Векторные величины, λ1, λ2 задаются в виде отрицательных действительных чисел и являются настроечными коэффициентами или регулирующими параметрами, определяемыми динамическими характеристиками человеко-машинной системы пользователь-экзоскелет.
В блоке 46 вычисления желаемых угловых ускорений вычисляют вектор желаемых угловых ускорений на основе вектора желаемых ускорений движения по траектории в декартовой системе координат и вектора желаемых углов и угловых скоростей.
Вектор  используется для вычисления вектора желаемых угловых ускорений
используется для вычисления вектора желаемых угловых ускорений  . Для этого, дифференцируя формулу (5) и подставляя в нее вектор
. Для этого, дифференцируя формулу (5) и подставляя в нее вектор  и вектора
и вектора  ,
,  , вычисляем компоненты вектора
, вычисляем компоненты вектора  .
.
Полученные выражения для желаемых вторых производных по углам сформированы с учетом возможных отклонений экзоскелета от желаемых траекторий в декартовых координатах.
В блоке 48 вычисляют вектор желаемых угловых ускорений на приводы, на основе ранее вычисленных вектора желаемых угловых ускорений, вектора желаемых углов и угловых скоростей, вектора текущих значений углов и угловых скоростей в шарнирных соединениях. Следующий уровень формирования алгоритма, обеспечивающий повышение качества управления приводной системы, состоит в том, что вычисляют компоненты вектора угловых ускорений  для отработки их приводной системой, который формируется с учетом возможных ошибок, возникающих при работе приводной системы экзоскелета
для отработки их приводной системой, который формируется с учетом возможных ошибок, возникающих при работе приводной системы экзоскелета

где µ1,µ2<0 - векторы управляющих параметров, значения которых
определяются динамикой привода. Это позволяет обеспечить устойчивое движение экзоскелета по желаемым траекториям и повысить точность реализации движения.
В блоке 71 производится оценка углового движения корпуса. Корпус оператора является наиболее весомым объектом, что, несомненно, требует учета его движения. В предлагаемом варианте способа управления угловое движение корпуса оператора ψ оценивается на основании формулы (Белецкий В.В. Двуногая ходьба. Модельные задачи динамики и управления. М.: Наука, 1984. 268 с. С. 65; Белецкий В.В., Лавровский Э.К. Модельная задача двуногой ходьбы / Механика твердого тела, №2, 1981. С. 25)
где mt - масса торса;
J - момент инерции торса;
r - расстояние центра масс торса от таза;
M - масса тела пользователя;
L - длина шага;
h - высота перемещения точки таза;
Tstep - период шага,
откуда также можно получить первую и вторую производные этого угла.
Оценка угла ψ и его производных используется для оценки внешнего момента, который в основном создается за счет колебаний корпуса оператора.
В блоке 40 оценки внешнего момента вычисляют вектор внешнего момента на основе ранее вычисленных вектора желаемых угловых ускорений на приводы, вектора текущих значений углов и угловых скоростей в шарнирных соединениях и измеренного вектора токов приводов экзоскелета, Для обеспечения плавного движения экзоскелета необходимо учитывать уравнений динамики совместно с оценкой колебательных движений корпуса. Приводной системой экзоскелета может быть гидропривод, пневмопривод или электропривод.
Известно [Титов В.В., Шардыко И.В., Даляев И.Ю. Реализация силомоментного управления для двухстепенного манипулятора /  НТУУ «КПI».
НТУУ «КПI».  машинобудування №2 (68). 2013. С. 150], что динамика электропривода описывается уравнениями
машинобудування №2 (68). 2013. С. 150], что динамика электропривода описывается уравнениями
где τm (t) - момент двигателя, Cm,  - моментная и электрическая постоянные двигателя соответственно,
- моментная и электрическая постоянные двигателя соответственно,  - противо- ЭДС двигателя, Rm, Lm - сопротивление и индуктивность якоря двигателя, Jm - момент инерции ротора двигателя, τmext (t) - внешний момент на валу двигателя,
- противо- ЭДС двигателя, Rm, Lm - сопротивление и индуктивность якоря двигателя, Jm - момент инерции ротора двигателя, τmext (t) - внешний момент на валу двигателя,  - ускорение и скорость угла поворота α вала двигателя,
- ускорение и скорость угла поворота α вала двигателя,  - сила трения на валу двигателя,
- сила трения на валу двигателя,  - напряжение питания на обмотках двигателя.
- напряжение питания на обмотках двигателя.
С другой стороны, в случае электропривода, вектор внешних по отношению к приводу моментов, полученный из уравнения динамики (1) имеет вид

где 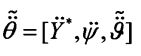 , может быть найден с помощью оценок, учитывающих масс-инерционные [Воронов А.В. Анатомическое строение и биомеханические характеристики мышц и суставов нижней конечности / М.: Физкультура, образование и наука, 2003. С. 11-12, 19-20; D. A. Winter, Biomechanics and motor control of human movement, 2005. JOHN WILEY & SONS, INC., P. 86, Table 4.1] характеристики механической системы - человека в экзоскелете, а также на основе учета динамики приводов и измерения векторов токов, протекающих в электромеханических приводах. В результате имеем
, может быть найден с помощью оценок, учитывающих масс-инерционные [Воронов А.В. Анатомическое строение и биомеханические характеристики мышц и суставов нижней конечности / М.: Физкультура, образование и наука, 2003. С. 11-12, 19-20; D. A. Winter, Biomechanics and motor control of human movement, 2005. JOHN WILEY & SONS, INC., P. 86, Table 4.1] характеристики механической системы - человека в экзоскелете, а также на основе учета динамики приводов и измерения векторов токов, протекающих в электромеханических приводах. В результате имеем

Здесь  - момент, развиваемый двигателем на выходном валу редуктора, Cm,
- момент, развиваемый двигателем на выходном валу редуктора, Cm,  - матрицы параметров электродвигателей, j - матрица коэффициента редукции, i - вектор тока, T [7×4] - матрица преобразования вектора θ к вектору межзвенных углов экзоскелетона,
- матрицы параметров электродвигателей, j - матрица коэффициента редукции, i - вектор тока, T [7×4] - матрица преобразования вектора θ к вектору межзвенных углов экзоскелетона,  - момент сил трения, приведенный к выходному валу двигателей.
- момент сил трения, приведенный к выходному валу двигателей.
В блоке 52 формирования управляющих сигналов вычисляют и формируют вектор управляющих сигналов на приводы экзоскелета на основе вычисленных ранее вектора текущих значений углов, оцененного вектора внешнего момента и измеренных вектора текущих значений углов и угловых скоростей в шарнирных соединениях, а также вектора токов приводов экзоскелета.
Управляющее напряжение в случае электроприводов вычисляется следующим образом

Аналогично строится управление и для приводов другого типа.
Вышеприведенные формулы используют при построении алгоритмов формирования желаемых траекторий движения в декартовой системе координат и управляющих сигналов на приводы экзоскелета и реализуются программно в бортовом контроллере экзоскелета.
Таким образом, благодаря существенным отличиям данного изобретения от известных:
- обеспечивается возможность содействия ходьбе пользователей как с частичной, так и с полной утратой функций опорно-двигательного аппарата, при этом передвижение пользователя выполняется согласно заданному экзоскелету паттерну ходьбы человека без нарушения функций опорно-двигательного аппарата с близкими к кинематическим характеристикам пользователя кинематическими характеристиками (отношением длин голеней и бедер);
- обеспечивается возможность восстановления правильного паттерна ходьбы пользователя при возможности изменения с пульта управления таких параметров ходьбы как длина шага, высота подъема ноги и темп ходьбы;
- обеспечивается возможность различных режимов движения пользователя по горизонтальной, наклонной и ступенчатой поверхностям, а также перешагивание через препятствие и ходьба на месте за счет задания экзоскелету движения по желаемым траекториям, соответствующим движению по выбранной поверхности;
- благодаря заданию желаемых угловых ускорений согласно экспоненциальной модели второго порядка с отрицательными действительными регулирующими параметрами обеспечивается возможность плавного и устойчивого движения по желаемым траекториям тазобедренных и голеностопных шарниров, задаваемых в декартовых координатах.
Указанные результаты подтверждают достижение в предлагаемом изобретении технических результатов в отношении расширения функциональных возможностей и улучшения эргономических характеристик устройства.
Проведенные заявителем патентные исследования показали, что аналогов предложенным существенным отличиям нет.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ С СИСТЕМОЙ ОПРЕДЕЛЕНИЯ ЖЕЛАТЕЛЬНЫХ ПАРАМЕТРОВ ШАГА В СРЕДЕ С ПРЕПЯТСТВИЯМИ | 2016 |
|
RU2636419C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ПОЛЬЗОВАТЕЛЮ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ | 2016 |
|
RU2620500C1 |
| СПОСОБ АДАПТАЦИИ ЭКЗОСКЕЛЕТА К АНТРОПОМЕТРИЧЕСКИМ ПАРАМЕТРАМ ПОЛЬЗОВАТЕЛЯ | 2019 |
|
RU2733043C2 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ ВИРТУАЛЬНОГО ПРОСТРАНСТВА ПОЛЬЗОВАТЕЛЮ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1996 |
|
RU2106695C1 |
| КОМПЛЕКТ КОСТЫЛЕЙ ПОЛЬЗОВАТЕЛЯ ДЛЯ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2015 |
|
RU2598058C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2018 |
|
RU2698364C1 |
| Способ дешифрации электромиосигналов и устройство для его реализации | 2020 |
|
RU2762775C1 |
| СПОСОБ ЧЕТЫРЕХОПОРНОГО ПЕРЕДВИЖЕНИЯ ДЕТСКОГО ЭКЗОСКЕЛЕТА | 2019 |
|
RU2739278C2 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
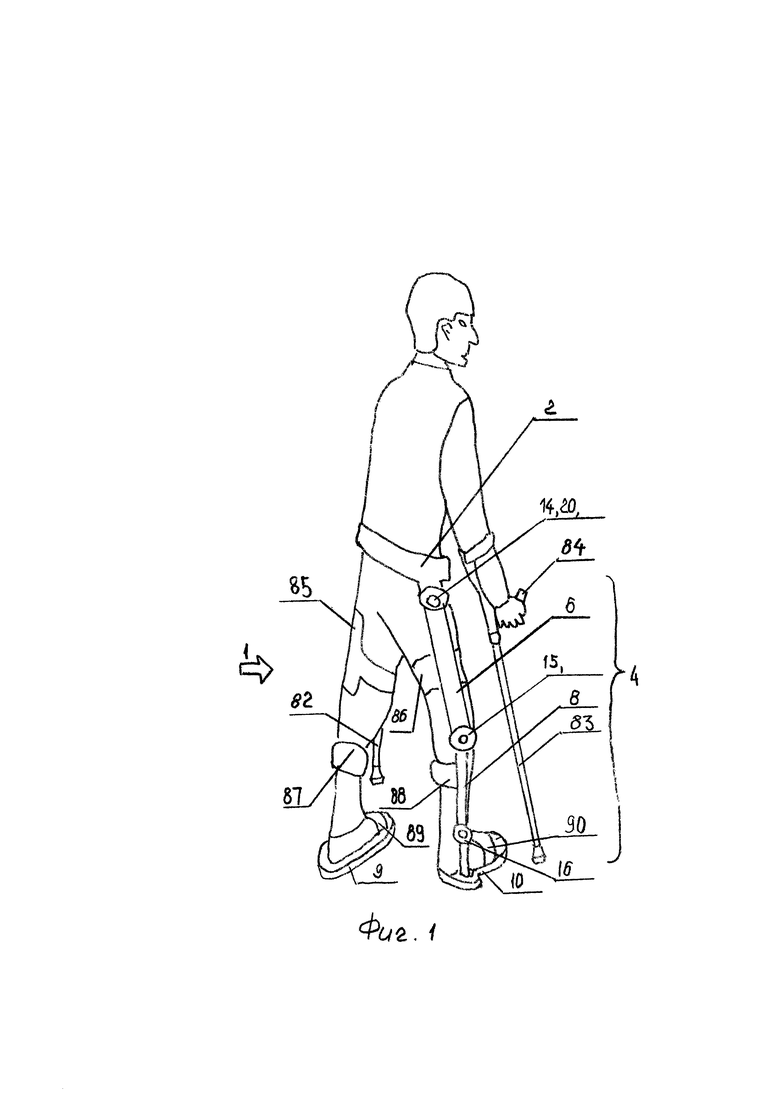

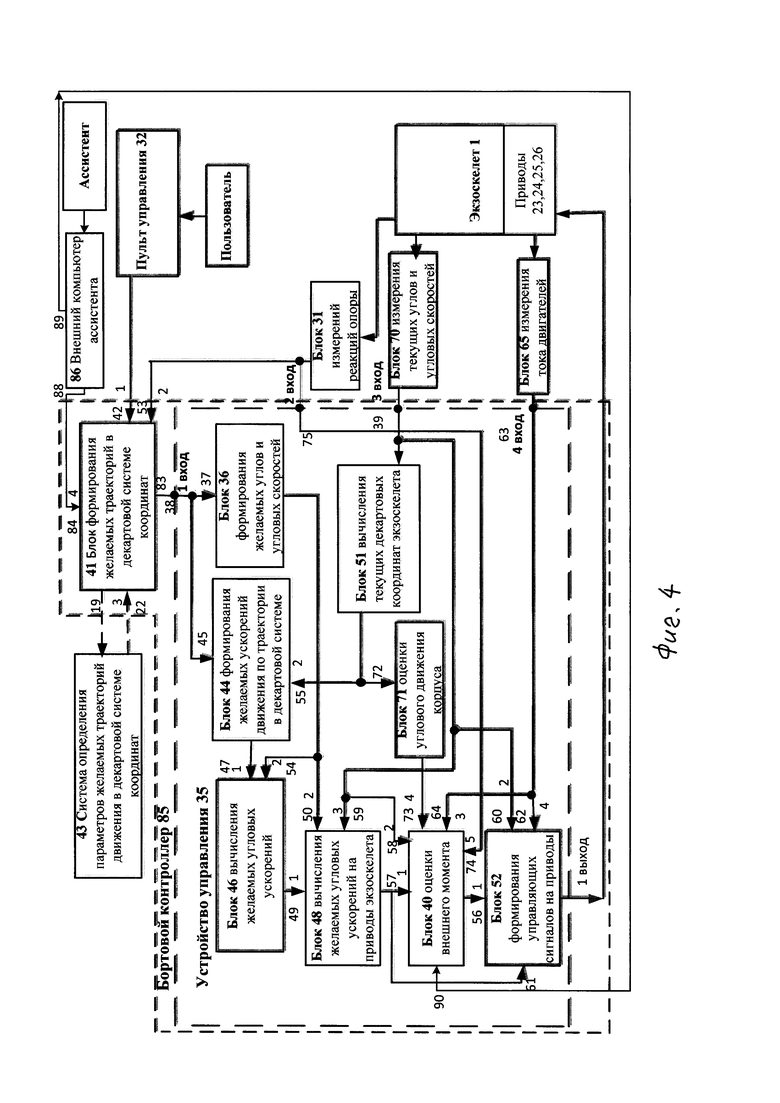
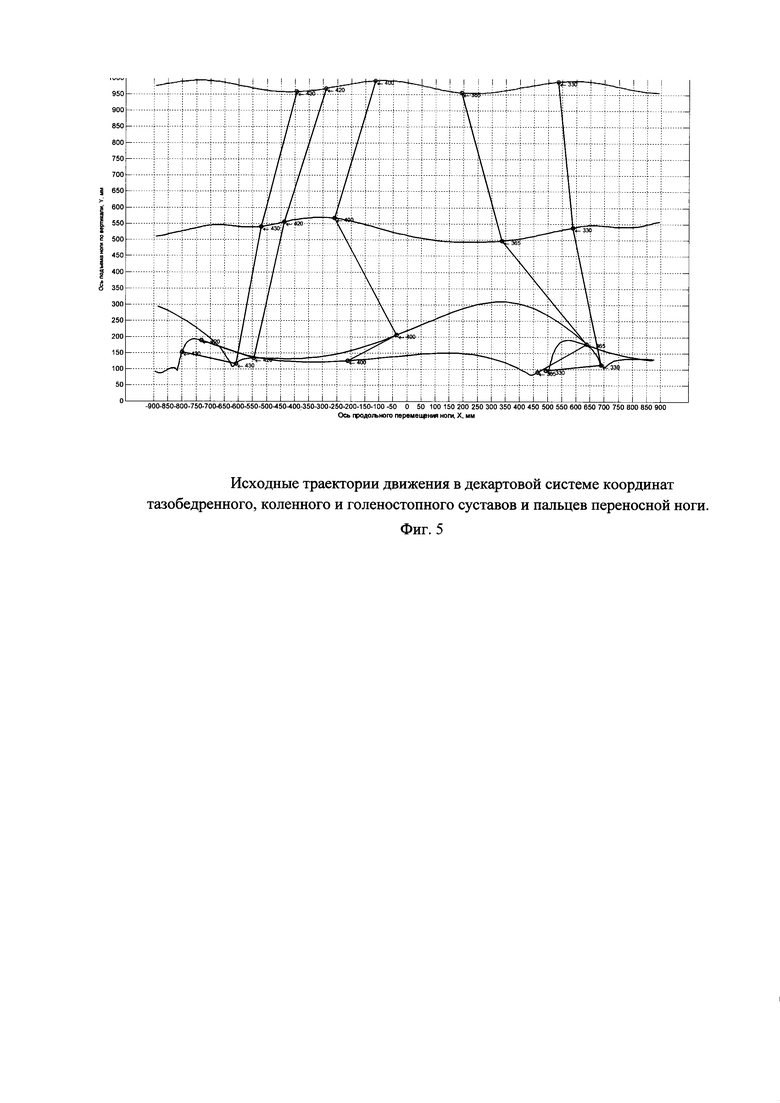
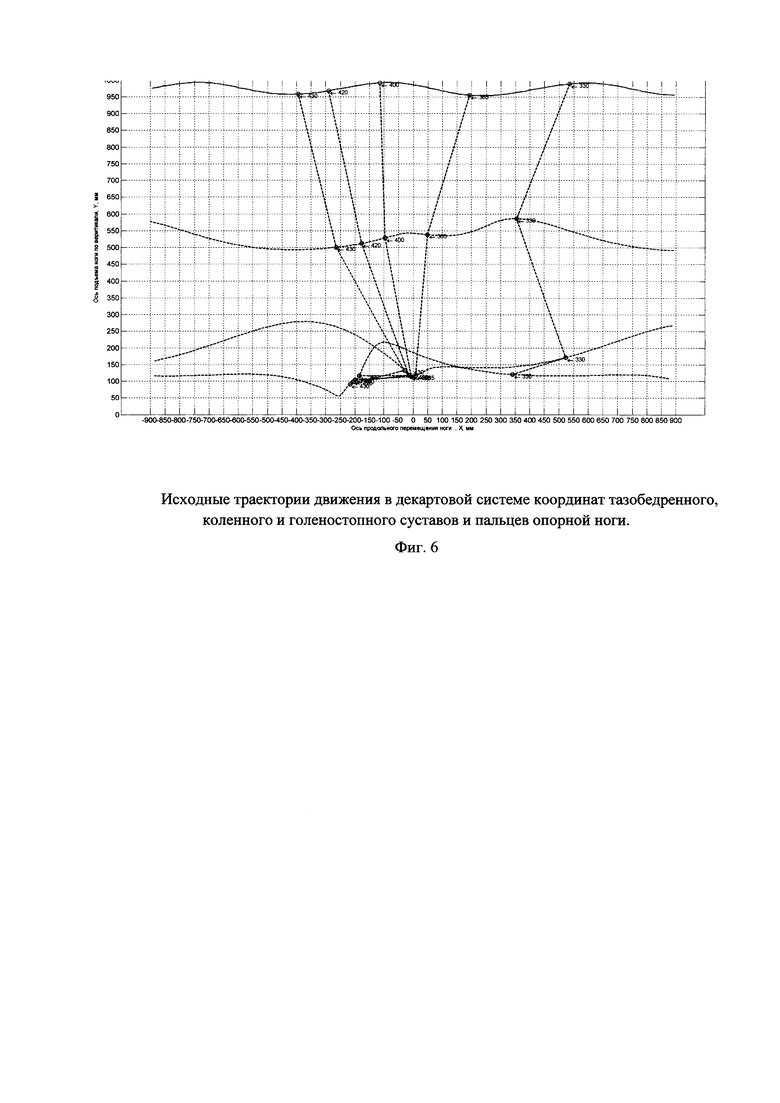
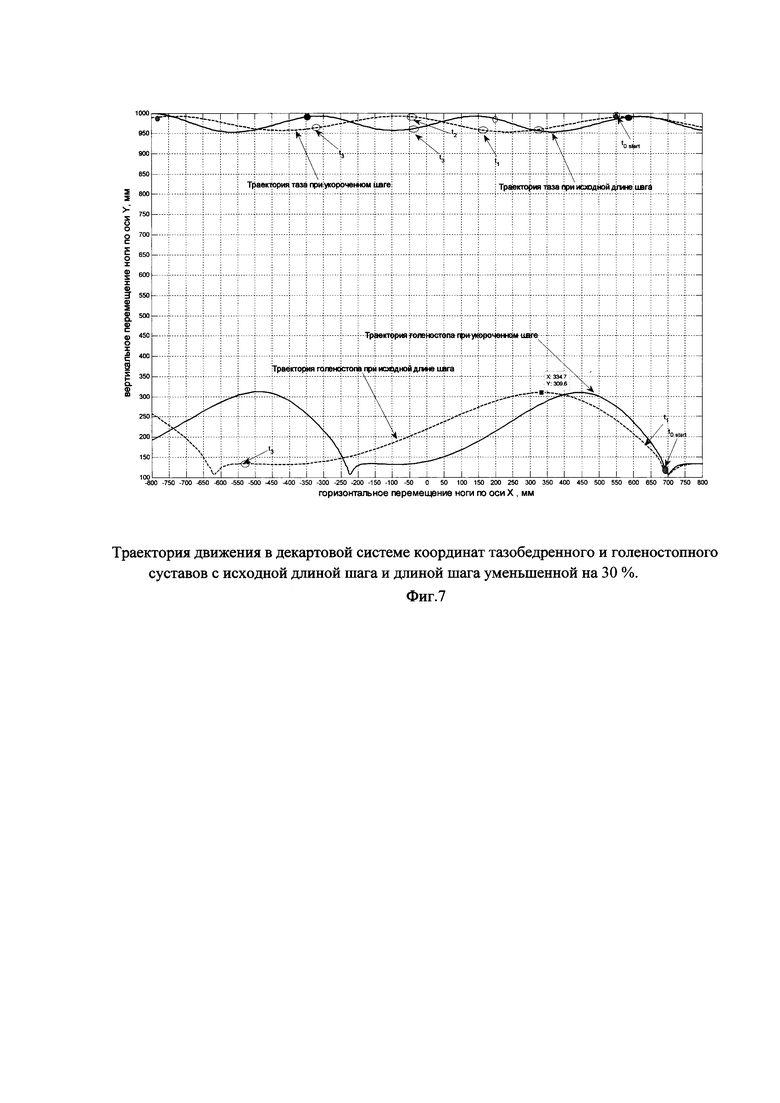

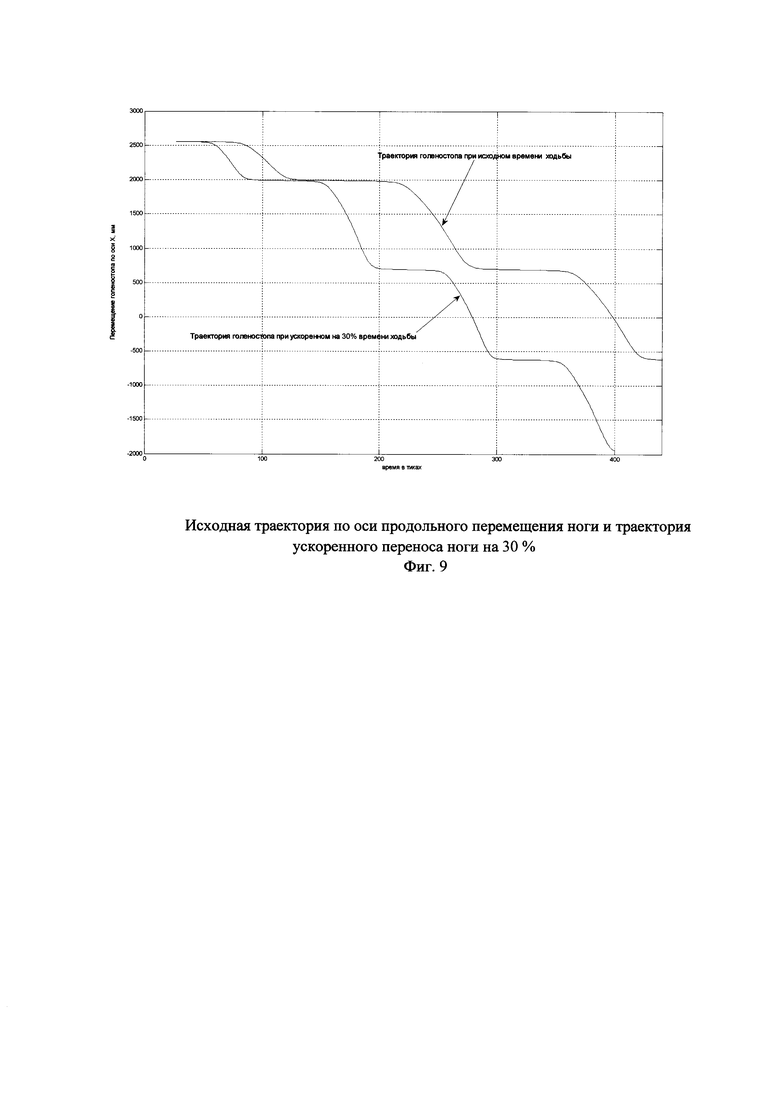
Группа изобретений относится к медицинской технике, а именно к средствам задания желаемых траекторий движения экзоскелета и способам управления устройствами в заранее определенных режимах. Способ задания желаемых траекторий движения экзоскелета для передвижения пользователя с нарушением функций опорно-двигательного аппарата, устройство содействия ходьбе этого пользователя и способ управления этим устройством обеспечивают возможность ходьбы в заранее определенных режимах движения пользователей с ограниченной подвижностью или полной неподвижностью нижних конечностей при нормальном функционировании верхних конечностей и верхней части корпуса. Изобретения обеспечивают возможность передвижения пользователей с паттерном ходьбы, близким к паттерну ходьбы человека без нарушения функций опорно-двигательного аппарата, при этом предоставляя пользователю с пульта управления самостоятельно изменять режим движения и такие параметры ходьбы, как длина шага, высота подъема ноги и темп ходьбы. Устройство содержит носимую пользователем часть, включающую моторизованный экзоскелет нижних конечностей, оснащенный устройством управления, реализованным в бортовом контроллере экзоскелета, и не носимую часть, включающую внешний компьютер ассистента-специалиста и систему определения параметров желаемых траекторий движения экзоскелета в декартовой системе координат. При этом управляющие сигналы на приводы экзоскелета формируются с учетом масс-инерционных характеристик сегментов тела пользователя и элементов экзоскелета и требований к качеству управления. Использование изобретений позволяет расширить функциональные возможности управления экзоскелетом. 3 н. и 6 з.п. ф-лы, 9 ил.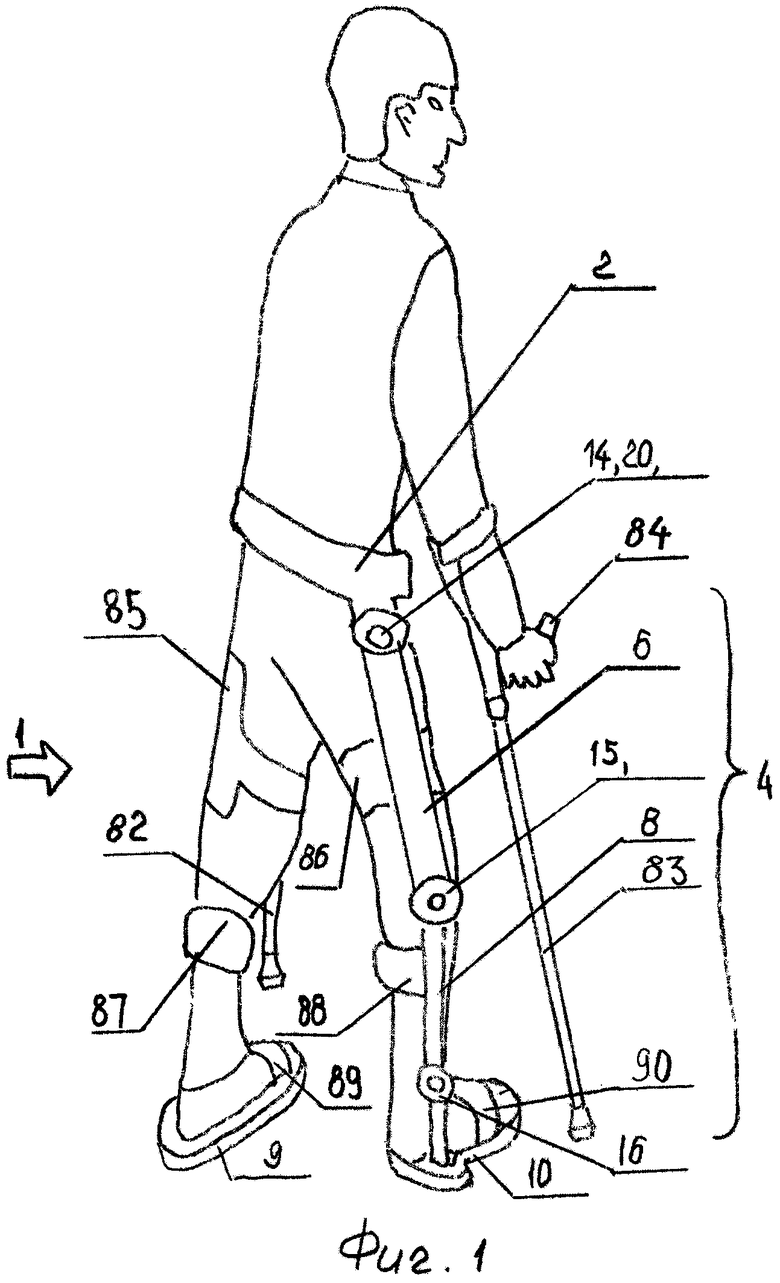
1. Способ задания желаемых траекторий движения экзоскелета в декартовой системе координат для передвижения в сагиттальной плоскости в заранее предопределенных режимах движения пользователя с нарушением функций опорно-двигательного аппарата при помощи экзоскелета, включающего тазовое звено и левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например электроприводами, а также бортовой контроллер, соединенный с измерителями относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом согласно данному способу при помощи системы захвата движения, включающей последовательно соединенные блок измерительных устройств для определения и передачи данных с параметрами захватываемого движения, блок обработки данных с параметрами захватываемого движения и блок хранения параметров захватываемого движения, выход которого соединен с выходом системы захвата движения, обеспечивают измерение декартовых координат заранее выбранных точек тела человека в процессе его движения, отличающийся тем, что систему захвата движения используют в составе системы определения параметров желаемых траекторий в декартовой системе координат, а в качестве человека, декартовые координаты заранее выбранных точек тела которого измеряют, используют человека без нарушения функций опорно-двигательного аппарата, а в качестве заранее выбранных точек его тела, декартовые координаты которых измеряют, используют точки пересечения лежащих во фронтальной плоскости оси тазобедренного сустава и осей голеностопных суставов с сагиттальной плоскостью, при этом указанные декартовые координаты измеряют в зависимости от времени в виде траекторий по осям декартовой системы координат указанной сагиттальной плоскости при движении вышеупомянутого человека для каждого из заранее предопределенных режимов движения и сохраняют в блоке хранения параметров захватываемого движения в виде массивов данных для каждой измеренной траектории, при этом ось ординат указанной системы координат сагиттальной плоскости направлена вертикально, а ось абсцисс - по курсу передвижения экзоскелета, а далее в интегрированном в систему определения параметров желаемых траекторий движения в декартовой системе координат блоке обработки параметров захватываемого движения, вход которого подключен к выходу системы захвата движения, осуществляют обработку параметров и/или коэффициентов интерполяции захватываемого движения, вычисляя на основе вышеуказанных массивов заданных таблично функций времени декартовых координат параметры и/или коэффициенты интерполяции для каждой из заранее выбранных гладких интерполирующих вышеуказанные траектории аналитических функций, дифференцируемых не менее двух раз, например сплайнов, в том числе и кубических сплайнов, при этом вычисленные параметры и/или коэффициенты интерполяции сохраняют в подключенном к выходу блока обработки параметров захватываемого движения и интегрированном в систему определения параметров желаемых траекторий в декартовой системе координат блоке хранения параметров и/или коэффициентов интерполяции желаемых траекторий движения экзоскелета в декартовой системе координат, при этом указанные измерения, обработку данных полученных в результате этих измерений и хранение результатов обработки этих данных осуществляют для группы людей с различным отношением длины голени к длине бедра, сохраняя при этом данные об указанных отношениях и длине голеней для каждого человека из этой группы.
2. Способ по п. 1, отличающийся тем, что блок обработки параметров захватываемого движения и блок хранения параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат реализованы программно в контроллере определения желаемых траекторий движения в декартовой системе координат.
3. Способ по п. 1, отличающийся тем, что в качестве заранее предопределенных режимов движения человека без нарушения функций опорно-двигательного аппарата использованы режимы: «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
4. Устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения, содержащее экзоскелет нижних конечностей, включающий тазовое звено и левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например электроприводами, а также бортовой контроллер, соединенный с измерителями относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом стопы снабжены датчиками реакции опоры, интегрированными в блок измерений реакций опоры и смонтированными в пятке и носке стоп, кроме того, устройство содействия ходьбе содержит левую и правую ручные опоры и устройство управления, включающее блок вычисления желаемых углов и угловых скоростей экзоскелета, блок оценки внешнего момента и блок вычисления и формирования управляющих сигналов на приводы экзоскелета, подключенный к управляющим входам соответствующих приводов, при этом вход блока вычисления желаемых углов и угловых скоростей экзоскелета соединен с первым входом устройства управления, третий вход которого соединен с выходом блока измерения текущих углов и угловых скоростей, отличающееся тем, что оно дополнено внешним компьютером ассистента-специалиста, выполненным с предоставлением ассистенту-специалисту возможности ввода в бортовой контроллер экзоскелета отношения длины голени к длине бедра, длины голени и масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета, выбора режима движения и регулирования таких параметров движения, как длина шага, высота подъема ноги и темп ходьбы, пультом управления, выполненным с предоставлением пользователю возможности выбора режима движения и регулирования таких параметров движения, как длина шага, высота подъема ноги и темп ходьбы, блоком измерения токов в электроприводах, содержащим первый, второй, третий, четвертый датчики тока соответственно первого, второго, третьего и четвертого электроприводов, блоком формирования желаемых траекторий в декартовой системе координат, выполненным с возможностью ввода в него и хранения в нем являющихся функциями времени параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат для заранее предопределенных режимов движения, первый вход которого соединен с выходом пульта управления, а второй вход - с выходом блока измерения реакций опоры, первый выход соединен с первым входом устройства управления, а второй выход выполнен с возможностью подключения к входу системы определения параметров желаемых траекторий движения в декартовой системе координат, выход которой выполнен с возможностью подключения к третьему входу блока формирования желаемых траекторий в декартовой системе координат, четвертый вход которого выполнен с возможностью подключения к выходу внешнего компьютера ассистента-специалиста, при этом устройство управления дополнено блоком формирования желаемых ускорений движения по траекториям в декартовой системе координат, первый вход которого подключен к первому входу устройства управления, блоком вычисления желаемых угловых ускорений, первый вход которого подключен к выходу блока формирования желаемых ускорений движения по траекториям, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления угловых ускорений на приводы экзоскелета, при этом первый вход блока вычисления угловых ускорений на приводы экзоскелета подключен к выходу блока вычисления желаемых угловых ускорений, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления вектора текущих декартовых координат экзоскелета, вход которого подключен к третьему входу устройства управления, а выход - ко второму входу блока формирования желаемых ускорений движения по траекториям в декартовой системе координат, блоком оценки углового движения корпуса, вход которого подключен к выходу блока вычисления текущих декартовых координат экзоскелета, а выход - к четвертому входу блока оценки внешнего момента, пятый вход которого через второй вход устройства управления подключен к выходу блока измерений реакций опоры, при этом первый вход блока формирования управляющих сигналов подключен к выходу блока оценки внешнего момента, первый вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, а второй вход - к третьему входу устройства управления, соединенному также с третьим входом блока вычислений угловых ускорений на приводы экзоскелета и ко второму входу блока формирования управляющих сигналов, третий вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, четвертый вход - к четвертому входу устройства управления, соединенному также с третьим входом блока оценки внешнего момента, а выход к выходу устройства управления, подключенному к управляющим входам приводов, снабженных датчиками тока электродвигателей блока измерения тока двигателей, при этом четвертый вход устройства управления подключен к выходу блока измерения токов электродвигателей.
5. Устройство по п. 4, отличающееся тем, что блок формирования желаемых траекторий в декартовой системе координат и устройство управления реализованы программно в бортовом контроллере экзоскелета.
6. Устройство по п. 4, отличающееся тем, что в качестве заранее предопределенных режимов движения экзоскелета использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
7. Способ управления устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата в заранее предопределенных режимах движения, содержащим экзоскелет нижних конечностей, включающим тазовое звено, левую и правую ножные опоры, каждая из которых состоит из бедренного и голенного звеньев и стоп, при этом смежные звенья соединены посредством соответствующих шарнирных соединений, обеспечивающих возможность их вращения в сагиттальной плоскости и снабженных соответствующими измерителями относительного углового перемещения, интегрированными в блок измерения текущих углов и угловых скоростей, при этом тазобедренные и коленные шарнирные соединения выполнены моторизованными и снабжены соответствующими приводами, например электроприводами, а также бортовой контроллер, соединенный с измерителями относительного углового поворота смежных звеньев и управляющими входами приводов моторизованных соединений, при этом стопы снабжены датчиками реакции опоры, интегрированными в блок измерений реакций опоры и смонтированными в пятке и носке стоп, кроме того, устройство содействия ходьбе содержит левую и правую ручные опоры и устройство управления, включающее блок вычисления желаемых углов и угловых скоростей экзоскелета, блок оценки внешнего момента и блок вычисления и формирования управляющих сигналов на приводы экзоскелета, подключенный к управляющим входам соответствующих приводов, при этом вход блока вычисления желаемых углов и угловых скоростей экзоскелета соединен с первым входом устройства управления, третий вход которого соединен с выходом блока измерения текущих углов и угловых скоростей, при этом согласно данному способу измеряют текущие углы и угловые скорости в тазобедренных и коленных соединениях и силы реакции опор, отличающееся тем, что устройство содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата дополнено внешним компьютером ассистента-специалиста, выполненным с предоставлением ассистенту-специалисту возможности ввода в бортовой контроллер экзоскелета отношения длины голени к длине бедра, длины голени и масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета, выбора режима движения и регулирования таких параметров движения, как длина шага, высота подъема ноги и темп ходьбы, пультом управления, выполненным с предоставлением пользователю возможности выбора режима движения и регулирования таких параметров движения, как длина шага, высота подъема ноги и темп ходьбы, блоком измерения токов в электроприводах, содержащим первый, второй, третий, четвертый датчики тока соответственно первого, второго, третьего и четвертого электроприводов, блоком формирования желаемых траекторий в декартовой системе координат, выполненным с возможностью ввода в него и хранения в нем являющихся функциями времени параметров и/или коэффициентов интерполяции желаемых траекторий движения в декартовой системе координат для заранее предопределенных режимов движения, первый вход которого соединен с выходом пульта управления, а второй вход - с выходом блока измерения реакций опоры, первый выход соединен с первым входом устройства управления, а второй выход выполнен с возможностью подключения к входу системы определения параметров желаемых траекторий движения в декартовой системе координат, выход которой выполнен с возможностью подключения к третьему входу блока формирования желаемых траекторий в декартовой системе координат, четвертый вход которого выполнен с возможностью подключения к выходу внешнего компьютера ассистента-специалиста, при этом устройство управления дополнено блоком формирования желаемых ускорений движения по траекториям в декартовой системе координат, первый вход которого подключен к первому входу устройства управления, блоком вычисления желаемых угловых ускорений, первый вход которого подключен к выходу блока формирования желаемых ускорений движения по траекториям, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления угловых ускорений на приводы экзоскелета, при этом первый вход блока вычисления угловых ускорений на приводы экзоскелета подключен к выходу блока вычисления желаемых угловых ускорений, а второй вход - к выходу блока формирования желаемых углов и угловых скоростей, блоком вычисления вектора текущих декартовых координат экзоскелета, вход которого подключен к третьему входу устройства управления, а выход - ко второму входу блока формирования желаемых ускорений движения по траекториям в декартовой системе координат, блоком оценки углового движения корпуса, вход которого подключен к выходу блока вычисления текущих декартовых координат экзоскелета, а выход - к четвертому входу блока оценки внешнего момента, пятый вход которого через второй вход устройства управления подключен к выходу блока измерений реакций опоры, при этом первый вход блока формирования управляющих сигналов подключен к выходу блока оценки внешнего момента, первый вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, а второй вход - к третьему входу устройства управления, соединенному также с третьим входом блока вычислений угловых ускорений на приводы экзоскелета и ко второму входу блока формирования управляющих сигналов, третий вход которого подключен к выходу блока вычисления угловых ускорений на приводы экзоскелета, четвертый вход - к четвертому входу устройства управления, соединенному также с третьим входом блока оценки внешнего момента, а выход - к выходу устройства управления, подключенному к управляющим входам приводов, снабженных датчиками тока электродвигателей блока измерения тока двигателей, при этом четвертый вход устройства управления подключен к выходу блока измерения токов электродвигателей, при этом согласно предлагаемому способу управления устройством содействия ходьбе пользователя с нарушением функций опорно-двигательного аппарата измеряют отношение длины голеней к длине бедер, длины голеней и осуществляют прямое или косвенное измерение масс-инерционных характеристик сегментов тела пользователя с прикрепленными к ним звеньями экзоскелета и через внешний компьютер ассистента-специалиста и четвертый вход блока формирования желаемых траекторий в декартовой системе координат бортового контроллера вводят в блок формирования желаемых траекторий в декартовой системе координат бортового контроллера и через него в систему определения параметров желаемых траекторий движения в декартовой системе координат такие измеренные параметры пользователя, как длина голеней, отношение длины голеней к длине бедер и масс-инерционные характеристики сегментов тела пользователя с надетым на него экзоскелетом, и согласно заданному отношению длины голеней к длине бедер пользователя осуществляют прием данных от системы определения параметров желаемых траекторий движения в декартовой системе координат, которые заносят в блок формирования желаемых траекторий в декартовой системе координат в виде массивов параметров (коэффициентов) интерполяции интерполирующих функций, полученных для человека без нарушения функций опорно-двигательного аппарата при его передвижении в каждом из заранее предопределенных режимов, задают с внешнего компьютера ассистента-специалиста или с пульта управления режим движения пользователя из ряда заранее предопределенных режимов, вычисляют численные значения интерполирующих функций и масштабируют их путем умножения на коэффициент, равный отношению длины голени пользователя с нарушением функций опорно-двигательного аппарата к длине голени человека без нарушения функций опорно-двигательного аппарата, задают с пульта управления или с внешнего компьютера ассистента-специалиста желаемые параметры шага пользователя путем масштабирования соответствующих пользователю интерполированных траекторий, представленных в декартовой системе координат на соответствующие коэффициенты, также для изменения времени переноса ноги (темпа ходьбы) - путем масштабирования оси времени этих функций, причем масштабирование выполняют как по каждой отдельной взятой координате, так и по их комбинациям, в блоке вычисления текущих декартовых координат экзоскелета вычисляют вектор текущих декартовых координат экзоскелета, на основе полученных измерений углов и угловых скоростей в тазобедренных и коленных соединениях, в блоке формирования желаемых траекторий в декартовой системе координат формируют желаемые траектории движения тазобедренного и голеностопных шарниров экзоскелета в зависимости от времени путем вычисления на основе хранящихся и являющихся функциями времени массивов значений параметров (коэффициентов) численных значений интерполирующих функций, записанных в декартовой системе координат; вычисляют вектор желаемых углов и угловых скоростей на основе ранее вычисленных значений вектора желаемых траекторий и их первых производных, в блоке формирования желаемых ускорений движения по траекториям в декартовой системе координат вычисляют вектор желаемых ускорений движения по траектории в декартовой системе координат на основе ранее вычисленных значений вектора положения и скорости в декартовой системе координат и вектора желаемых траекторий и их первых и вторых производных, в блоке формирования желаемых углов и угловых скоростей вычисляют вектор желаемых угловых ускорений на основе вектора желаемых ускорений движения по траектории в декартовой системе координат и вектора желаемых углов и угловых скоростей, в блоке вычисления желаемых угловых ускорений на приводы экзоскелета вычисляют вектор желаемых угловых ускорений на приводы, на основе ранее вычисленных вектора желаемых угловых ускорений, вектора желаемых углов и угловых скоростей, вектора текущих значений углов и угловых скоростей в шарнирных соединениях, в блоке оценки внешнего момента вычисляют вектор внешнего момента на основе ранее вычисленных вектора желаемых угловых ускорений на приводы, вектора текущих значений углов и угловых скоростей в шарнирных соединениях, вектора реакции в опорах, измеренного вектора токов приводов экзоскелета и с учетом масс-инерционных характеристик сегментов тела пользователя с надетым на него экзоскелетом, а вектор управляющих сигналов на приводы экзоскелета вычисляют и формируют в блоке формирования управляющих сигналов на приводы экзоскелета на основе вычисленных ранее вектора текущих значений углов, вектора внешнего момента и измеренных вектора текущих значений углов и угловых скоростей в шарнирных соединениях, вектора токов приводов экзоскелета.
8. Способ по п. 7, отличающийся тем, что в качестве заранее предопределенных режимов движения экзоскелета использованы режимы «Идти по горизонтальной поверхности», «Идти по лестнице вверх», «Идти по лестнице вниз», «Идти по наклонной поверхности вверх», «Идти по наклонной поверхности вниз», «Перешагнуть через препятствие», «Сидеть на опоре», «Стоять вертикально с выпрямленными ногами», «Встать вертикально с выпрямленными ногами из положения «Сидеть на опоре», «Сесть на опору из положения «Стоять вертикально с выпрямленными ногами».
9. Способ по п. 7, отличающийся тем, что блок формирования желаемых траекторий движения в декартовой системе координат и устройство управления реализованы программно в бортовом контроллере экзоскелета.
| НОСИМОЕ ВСПОМОГАТЕЛЬНОЕ УСТРОЙСТВО, СОДЕЙСТВУЮЩЕЕ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ, И УПРАВЛЯЮЩАЯ ПРОГРАММА | 2005 |
|
RU2364385C2 |
| СПОСОБ ПОЛУЧЕНИЯ КОНСЕРВОВ "САВЕМ-ТХУПЛЬ" | 2015 |
|
RU2583657C1 |
| US 2015025423 A1 22.01.2015 | |||
| WO 2011002306 A1 06.01.2011 | |||
| WO 2014113456 A1 24.07.2014. | |||

