ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к медицинской технике, а более конкретно к аппаратам помощи при ходьбе людей с ограниченными двигательными возможностями, не имеющих возможности к самостоятельному передвижению, с ограниченной подвижностью или полной неподвижностью нижних конечностей при нормальном функционировании верхних конечностей и верхней части корпуса. Аппарат обеспечивает возможность самостоятельного передвижения человека по горизонтальной и наклонной опорной поверхности, а также вверх и вниз по лестничным маршам с заранее неизвестными высотой и глубиной ступеней и переход через препятствия с заранее неизвестными высотой и протяженностью.
УРОВЕНЬ ТЕХНИКИ
Известен аппарат для передвижения человека с нарушением опорно-двигательных функций, содержащий левую и правую ручные опоры и активный экзоскелетон нижних конечностей, выполненный с возможностью крепления его к ножным конечностям и корпусу тела человека. Ручные опоры снабжены органами управления, обеспечивающими управление приводами звеньев экзоскелетона и коленными тормозами [US 7998096 В1, опубл. 16.08.2011].
В данном устройстве ручные опоры соединены с экзоскелетоном проводными каналами обмена данными. В нем невозможно обеспечить согласованное движение всех приводов, а само оно может обеспечить движение пользователя только в пошаговом режиме и не может обеспечить пользователю ходьбу, близкую к естественной. Указанные факторы отрицательно влияют на эргономические характеристики устройства в целом. Кроме того, данное устройство не позволяет обеспечить пользователю ходьбу в среде с препятствиями с заранее неизвестными параметрами.
Известно устройство содействия движению, содержащее левую и правую ручные опоры и активный экзоскелетон нижних конечностей, выполненный с возможностью крепления его к ножным конечностям и корпусу тела человека и пультом управления режимами, размещенным на кисти пользователя [US 20100094188 А1, опубл. 15.04.2010].
Данное устройство не позволяет осуществлять движение в автоматическом режиме по опорной поверхности с препятствиями с заранее неизвестными параметрами - высотой и длиной, а также по лестницам с заранее неизвестной высотой и глубиной ступеней.
Наиболее близким к предлагаемому изобретению является аппарат помощи при ходьбе человеку с нарушением опорно-двигательных функций по патенту США [US 9295604 В2 А1, опубл. 29.03.2016], содержащий левую и правую ручные опоры и экзоскелет нижних конечностей. Экзоскелетон содержит тазовое звено, левую и правую ножные опоры, каждая из которых в свою очередь содержит бедренное звено, голенное звено и нижнее звено в виде стопы; тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата. При этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости при помощи электродвигателей для каждого шарнирного соединения, работающих от системы питания. Аппарат содержит элементы крепления к частям тела пользователя, установленные на каждом из звеньев, по крайней мере один датчик угла поворота каждого из шарнирных соединений, обеспечивающий информацию об относительных поворотах звеньев аппарата, и датчик угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной плоскости; по крайней мере один датчик силы реакции стопы каждой ножной опоры в вертикальном направлении. Передвижение аппарата обеспечивает блок управления аппаратом с пультом задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата.
Аппарат, раскрытый в наиболее близком аналоге, как и в других, перечисленных выше аналогах, не позволяет пользователю осуществлять ходьбу по опорной поверхности, включающей препятствия с заранее неизвестными высотой и длиной и подниматься и спускаться по лестницам с заранее неизвестными высотой и глубиной ступеней.
Кроме того, конструктивные особенности этого, как и других вышеупомянутых аппаратов, не позволяют обеспечить пользователю близкую к естественной и комфортабельную для пользователя походку, так как данных от используемых в этих аппаратах датчиков недостаточно для формирования сигналов управления приводами, учитывающими масс-инерционные характеристики бедер и голеней нижних конечностей и торса и тела пользователя и всех звеньев экзоскелетона.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Задачей заявленного изобретения является разработка аппарата помощи при ходьбе человеку с нарушением опорно-двигательных функций, содержащего систему определения требуемых параметров шага, позволяющего обеспечить пользователю, близкую к естественной и комфортабельную для пользователя походку при передвижении по опорной поверхности, содержащей препятствия с заранее не известными параметрами.
Техническим результатом изобретения является расширение функциональных возможностей аппарата, повышение безопасности пользователя аппарата и улучшение эргономических характеристик аппарата.
Указанный технический результат достигается за счет того, что в отличие от известного аппарата помощи при ходьбе, содержащего левую левую и правую ручные опоры, снабженные инклинометрами и тактильными датчиками, смонтированными на опорных концах опор, и экзоскелет нижних конечностей, содержащий, по меньшей мере, следующие звенья: тазовое звено, а также левую и правую ножные опоры, каждая из которых в свою очередь содержит бедренное звено, голенное звено и нижнее звено в виде стопы; тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата, при этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости; элементы крепления к частям тела пользователя, установленные на каждом из звеньев; по меньшей мере по одному датчику угла поворота и одному датчику угловой скорости каждого из шарнирных соединений, обеспечивающие информацию об относительных поворотах и угловых скоростях звеньев аппарата; датчик угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси посредством измерения угла наклона в сагиттальной плоскости; по меньшей мере одну стереокамеру, смонтированную на экзоскелете и выполненную с возможностью формирования матрицы данных о дальности до объектов в поле зрения стереокамеры; по меньшей мере один датчик силы реакции стопы каждой ножной опоры в вертикальном направлении; систему питания и блок управления аппаратом с пультом задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и стереокамеры и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата, в предложенном аппарате помощи при ходьбе введены первая и вторая линейки светоизлучающих маркерных элементов с заранее заданными и несовпадающими цветами излучения и заранее заданными расстояниями до опорных концов ручных опор, смонтированные соответственно на левой и правой ручных опорах, каждое из голеностопных шарнирных соединений выполнено с возможностью вращения стопы вокруг трех осей координат, датчики силы реакции стопы каждой ножной опоры выполнены с возможностью измерения силы реакции стопы каждой ножной опоры дополнительно в продольном направлении, ручные опоры снабжены линейками светоизлучающих маркерных элементов с заранее заданными и несовпадающими цветами излучения и расстояниями от опорных концов ручных опор, стереокамера выполнена с дополнительной возможностью формирования матрицы данных о цвете элементов изображения объектов в поле зрения стереокамеры, при этом стереокамера смонтирована на экзоскелете с возможностью обеспечения попадания в поле зрения стереокамеры по меньшей мере части ручной опоры с размещенными на ней маркерными элементами, при этом блок управления аппаратом выполнен с возможностью сбора данных, полученных от вышеперечисленных датчиков и стереокамеры, формирования данных о желаемых геометрических параметрах шага - желаемой длине шага и желаемой высоте подъема пятки экзоскелета, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета.
Предпочтительно, что светоизлучающие элементы смонтированы в линейке с постоянным шагом, при этом первый элемент соответствующей линейки смонтирован на расстоянии, равном величине этого шага от опорного конца соответствующего костыля.
Предпочтительно, что датчики углов поворота шарнирных соединений установлены непосредственно в соответствующих шарнирных соединениях.
Предпочтительно, что датчики углов поворота шарнирных соединений установлены на бедренных и голенных звеньях.
Предпочтительно, что датчики угловой скорости шарнирных соединений установлены непосредственно в соответствующих шарнирных соединениях.
Предпочтительно, что датчики угловой скорости шарнирных соединений установлены на бедренных и голенных звеньях.
Предпочтительно, что датчик угла наклона торса, соединенный с блоком управления аппаратом, установлен на торсе пользователя.
Предпочтительно, что каждое из тазобедренных и коленных шарнирных соединений выполнено с возможностью вращения соответствующих звеньев при помощи соответствующих им электродвигателей, управляющие входы которых соединены с блоком управления аппаратом.
Предпочтительно, что электродвигатели установлены непосредственно в соответствующих шарнирных соединениях.
Предпочтительно, что каждый электродвигатель снабжен соответствующим ему датчиком тока, подключенным к блоку управления аппаратом.
Предпочтительно, что дополнительно содержит второй пульт задания режимов работы аппарата.
Предпочтительно, что первый и второй пульты задания режимов работы аппарата связаны с блоком управления аппаратом и смонтированы на рукоятке левой и правой ручных опор соответственно.
Предпочтительно, что содержит четыре датчика силы реакции стопы, соединенных с блоком управления аппаратом.
Предпочтительно, что первый и второй датчики силы реакции стопы установлены соответственно в пятке и в носке левой стопы, а третий и четвертый датчики силы реакции стопы установлены соответственно в пятке и в носке правой стопы.
Предпочтительно, что бедренные и голенные звенья выполнены с возможностью регулировки их продольных размеров.
Предпочтительно, что система питания содержит четыре аккумулятора, обеспечивающие работу электродвигателей, причем два из них установлены в корпусах левого и правого бедренных звеньев, а остальные два - в левой и правой ручных опорах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
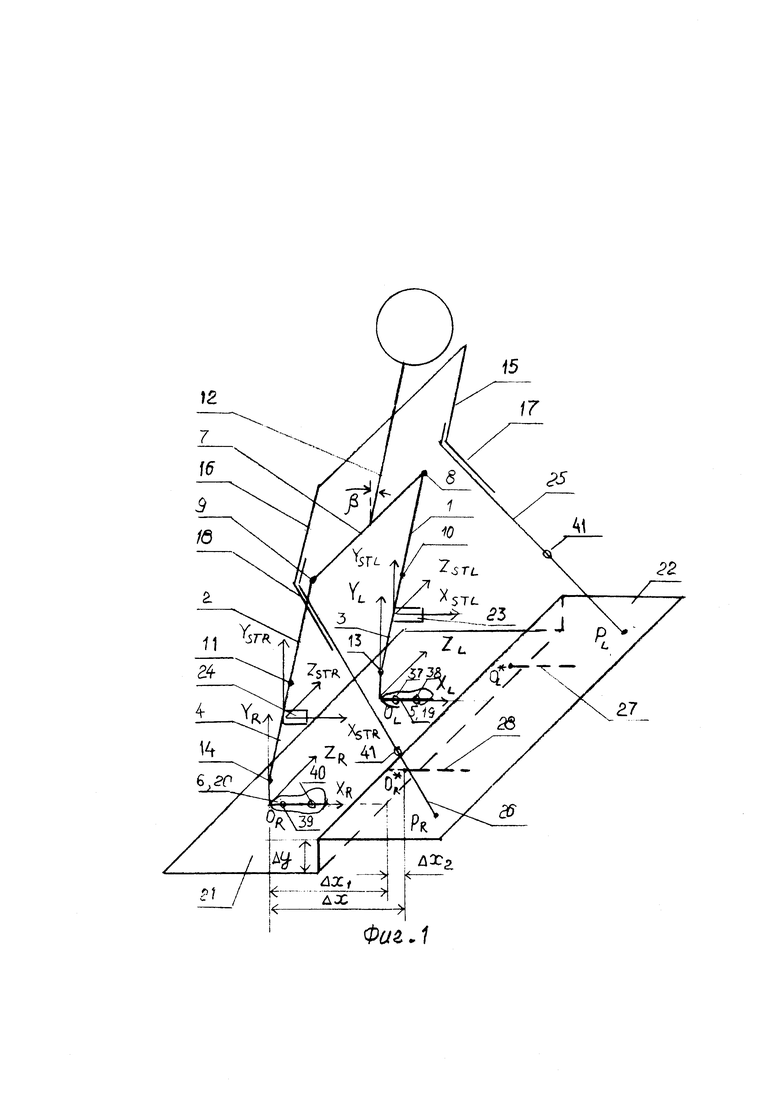
На фиг. 1 схематично показан общий вид экзоскелета с двумя ручными опорами.
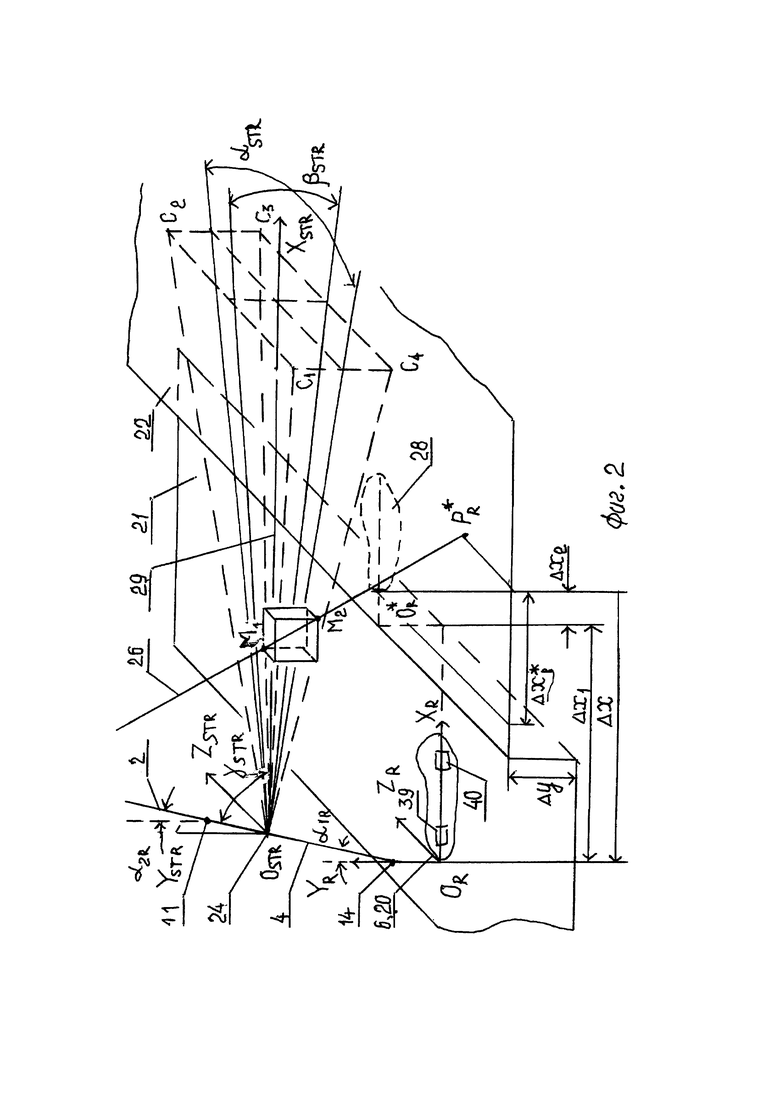
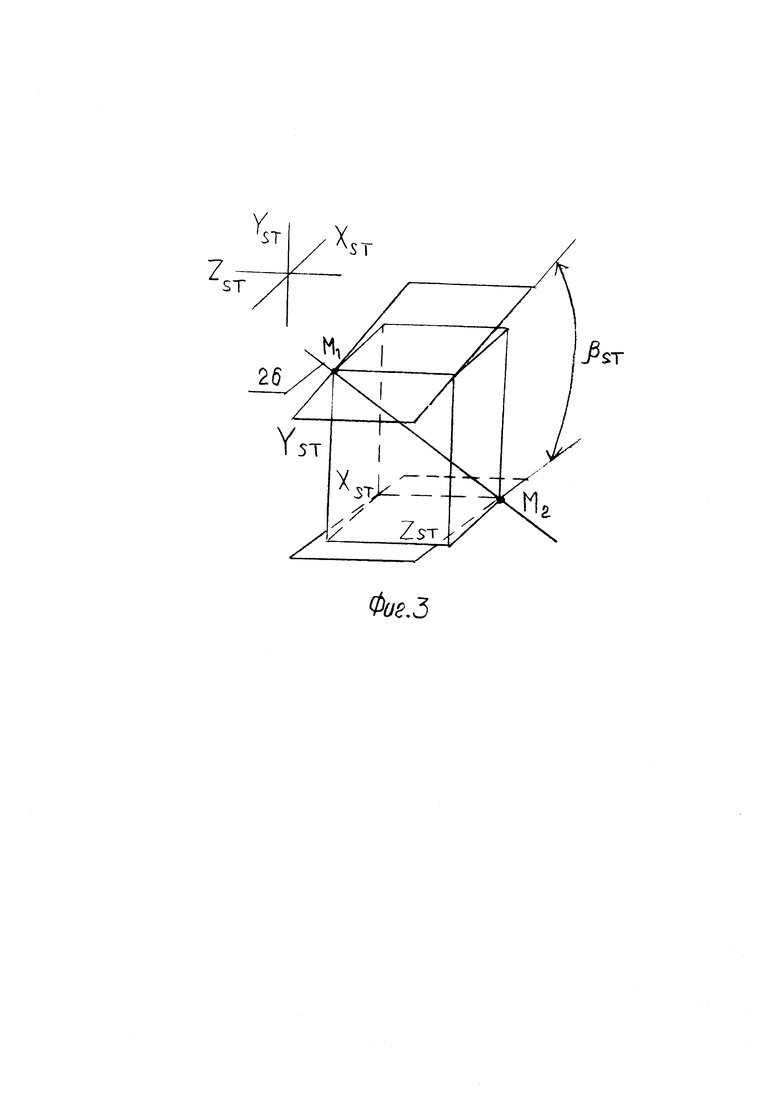
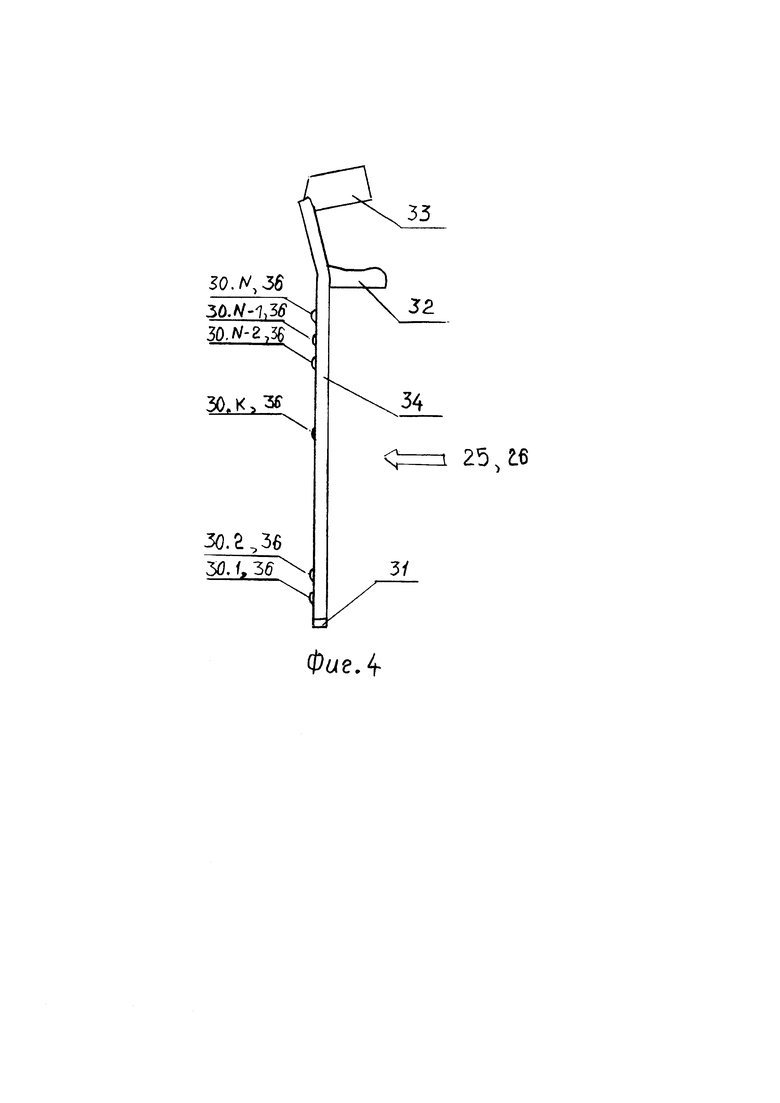
На фиг. 2 схематично показано размещение стереокамеры на голени правой ноги, а на фиг. 3 показана часть правой ножной опоры, попавшей в поле зрения стереокамеры. На фиг. 4 приведен внешний вид ручной опоры с установленными на ней маркерными светоизлучающими элементами.
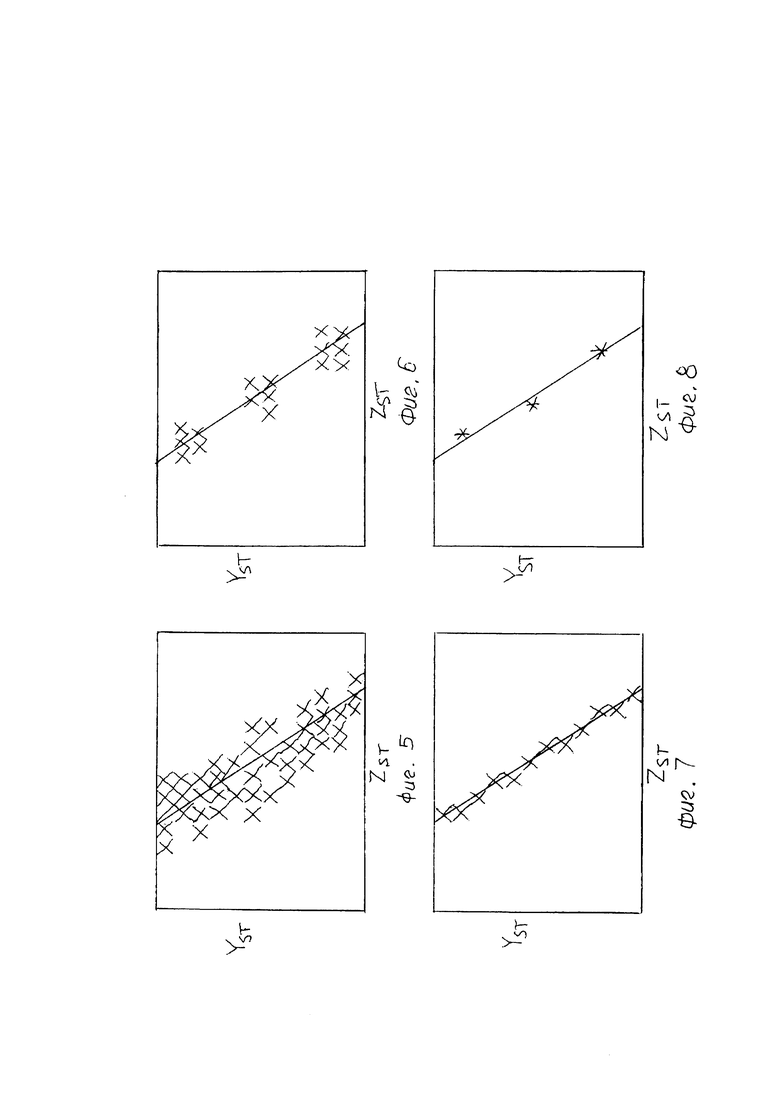
На фиг. 5-8 схематично показан вид матриц изображений со стереокамеры для костыля и маркерных элементов.
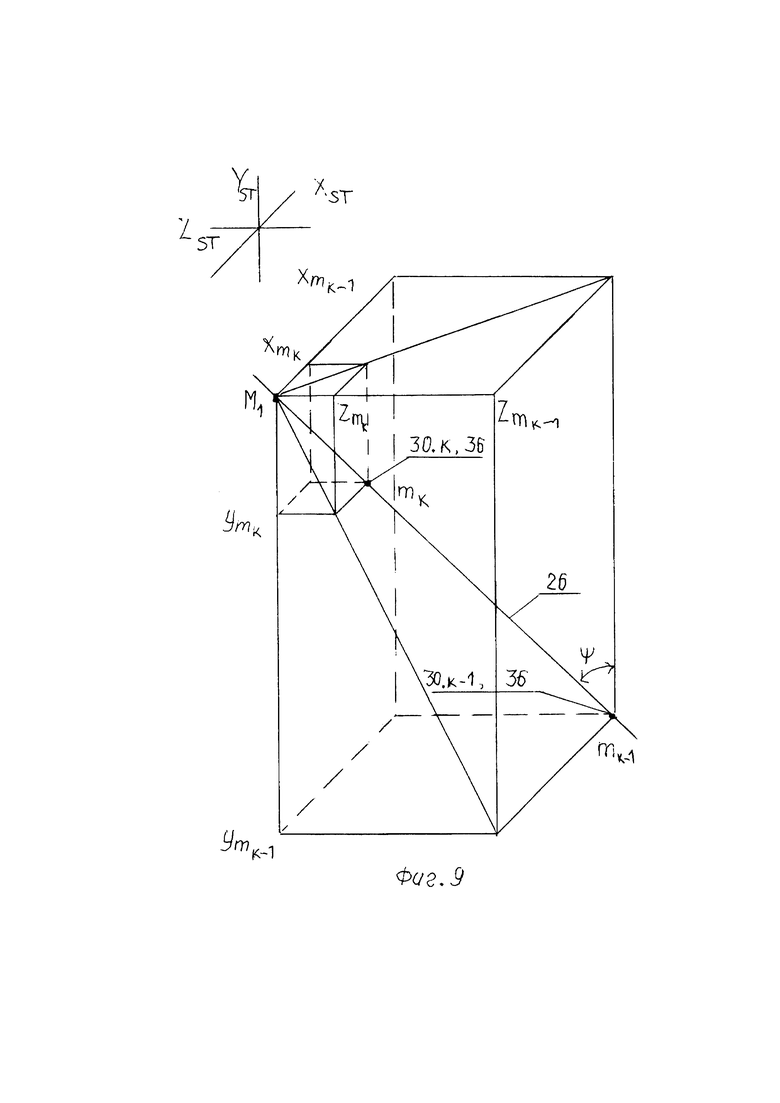
На фиг. 9 приведены результаты вспомогательных геометрических построений, поясняющих работу аппарата.
На фиг. 1-9 обозначены:
1 и 2 - левое и правое бедренные звенья экзоскелета;
3 и 4 - левое и правое голенные звенья экзоскелета;
5 и 6 - левая и правая стопы экзоскелета;
7 - тазовое звено экзоскелета;
8 и 9 - левый и правый моторизованные тазобедренные шарнирные узлы экзоскелета;
10 и 11 - левый и правый моторизованные коленные шарнирные узлы экзоскелета;
12 - торс пользователя экзоскелета;
13 и 14 - левый и правый голеностопный шарнирный узел экзоскелета;
15 и 16 - левое и правое плечи пользователя экзоскелета;
17 и 18 - левое и правое предплечья пользователя экзоскелета;
19 и 20 - левая и правая стопы пользователя экзоскелета;
21 и 22 - нижняя и верхняя опорные поверхности;
23 и 24 - левая и правая стереокамеры;
25 и 26 - левый и правый костыли (левая и правая ручные опоры);
27 и 28 - желаемое положение левой и правой стоп экзоскелета;
29 - оптическая ось правой стереокамеры;
30.i - i-й светоизлучающий элемент линейки из N светоизлучающих элементов;
31 - тактильный датчик;
32 - опорная рукоятка;
33 - держатель предплечья пользователя;
34 - опорная труба;
35 и 36 - первая и вторая линейки светоизлучающих элементов;
37, 38, 39 и 40 - первый, второй, третий и соответственно четвертый датчики силы реакции опоры;
41 - инклинометр;
42 и 43 - левая и правая ножные опоры;
44, 45, 46, 47, 48 и 49 - датчики угла поворота соответственно левого тазобедренного, правого тазобедренного, левого коленного, правого коленного, левого голеностопного и правого голеностопного шарнирных узлов;
50, 51, 52, 53, 54 и 55 - датчики угловой скорости соответственно левого тазобедренного, правого тазобедренного, левого коленного, правого коленного, левого голеностопного и правого голеностопного шарнирных узлов;
56 - датчик угла наклона торса в сагиттальной плоскости;
57 - система питания;
58 - блок управления аппаратом;
60 и 61 - первая и соответственно вторая линейки светоизлучающих маркерных элементов;
62, 63, 64 и 65 - первый, второй, третий и четвертый электродвигатели;
66. 67, 68 и 69 - первый, второй, третий и четвертый датчики тока электродвигателей;
70 и 71 - первый и второй пульты управления;
72 и 73 - рукоятки соответственно левой и правой ручных опор;
74, 75, 76 и 77 - первый, второй, третий и четвертый аккумуляторы.
Кроме того, на фиг. 1-9 обозначены:
OL, XL, YL и ZL - начало и оси декартовой системы координат, связанные с исходным положением пятки левой стопы экзоскелета;
OR, XR, YR и ZR - начало и оси декартовой системы координат, связанные с исходным положением пятки правой стопы экзоскелета;
OL* - начало декартовой системы координат, связанной с желательным положением пятки левой стопы экзоскелета;
OR* - начало декартовой системы координат, связанной с желательным положением пятки правой стопы экзоскелета;
OSTR, XSTR, YSTR и ZSTR - начало и оси декартовой системы координат, связанные с установкой стереокамеры правой ножной опоры;
αSTR - угол обзора стереокамеры правой ножной опоры в горизонтальной плоскости;
βSTR - угол обзора стереокамеры правой ножной опоры в паросагиттальной плоскости;
γSTR - угол наклона относительно голенного звена оптической оси стереокамеры правой ножной опоры в паросагиттальной плоскости;
P*L и P*R - точки упора на опорную плоскость левой и правой ручной опоры;
M1M2 - часть костыля, попадающая в поле зрения стереокамеры;
α1R и α2R - угол наклона относительно вертикали голенного и бедренного звеньев правой ножной опоры;
β - угол наклона корпуса пользователя экзоскелета в сагиттальной плоскости;
ΨL и ΨR - угол наклона левого и правого костылей относительно вертикальной оси.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Аппарат помощи при ходьбе содержит левую 25 и правую 26 ручные опоры, снабженные тактильными датчиками 31, смонтированными на опорных концах опор, и инклинометрами 41 и экзоскелет нижних конечностей, содержащий, по меньшей мере, следующие звенья: тазовое звено 7, а также левую 42 и правую 43 ножные опоры, каждая из которых в свою очередь содержит бедренное 1 (2) звено, голенное 3 (4) звено и нижнее звено в виде стопы 5 (6); тазобедренные 8 и 9, коленные 10 и 11 и голеностопные 13 и 14 шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата, при этом тазобедренные 8 и 9 и коленные 10 и 11 шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости; элементы крепления к частям тела пользователя (на чертежах не показаны), установленные на каждом из звеньев; по меньшей мере по одному датчику 44, 45, 46, 47, 48 и 49 угла поворота и одному датчику 50, 51, 52, 53, 54 и 55 угловой скорости каждого из шарнирных соединений 8, 9, 10, 11, 13, 14, обеспечивающие информацию об относительных поворотах и угловых скоростях звеньев аппарата; датчик 56 угла наклона торса 12, обеспечивающий информацию о наклоне торса 12 пользователя относительно вертикальной оси посредством измерения угла наклона в сагиттальной плоскости; левая 23 и правая 24 стереокамеры, смонтированные на экзоскелете и выполненные с возможностью формирования матрицы данных о дальности до объектов в поле зрения стереокамер 23 или 24; по два датчика 37 и 38 (39 и 40) силы реакции стопы каждой ножной опоры 42 (43) в вертикальном направлении; систему питания 57 и блок 58 управления аппаратом с пультом 59 задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и стереокамер 23 и 24 и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта 59 задания режимов работы аппарата, в предложенном аппарате помощи при ходьбе введены первая 60 и вторая 61 линейка из N светоизлучающих маркерных элементов 30.1, 30.2, … 30.N с заранее заданными и несовпадающими цветами излучения и заранее заданными расстояниями до опорных концов ручных опор 25 и 26, смонтированные соответственно на левой 25 и правой 26 ручных опорах, каждое из голеностопных шарнирных соединений 13 и 14 выполнено с возможностью вращения стопы вокруг трех осей координат, датчики 37, 38, 39 и 40 силы реакции стопы каждой ножной опоры выполнены с возможностью измерения силы реакции стопы каждой ножной опоры дополнительно в продольном направлении, ручные опоры 25 и 26 снабжены линейками 61 и 62 светоизлучающих маркерных элементов 30.1, 30.2, … 30.N с заранее заданными и несовпадающими цветами излучения и расстояниями от опорных концов ручных опор 25 и 26, стереокамеры 23 и 24 выполнены с дополнительной возможностью формирования матрицы данных о цвете элементов изображения объектов в поле зрения стереокамеры, при этом стереокамеры 23 и 24 смонтированы на экзоскелете с возможностью обеспечения попадания в поле зрения стереокамеры 23 и 24 по меньшей мере части ручной опоры 25 и 26 с размещенными на ней маркерными элементами 30.1, 30.2, … 30.N, при этом блок 58 управления аппаратом выполнен с возможностью сбора данных, полученных от вышеперечисленных датчиков и стереокамер 23 и 24, формирования данных о желаемых геометрических параметрах шага - желаемой длине шага и желаемой высоте подъема пятки экзоскелета, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса 12 тела пользователя и всех звеньев экзоскелета.
Светоизлучающие элементы 30.1, 30.2, … 30.N смонтированы в линейке 60 и 61 с постоянным шагом δ, при этом первый элемент 30.1 соответствующей линейки 60 или 61 смонтирован на расстоянии δ, равном величине этого шага от опорного конца соответствующего костыля 25 или 26.
Датчики 44, 45, 46, 47, 48, 49 углов поворота шарнирных соединений установлены непосредственно в соответствующих шарнирных соединениях 8, 9, 10, 11, 13 и 14.
Датчики 44, 45, 46, 47, 48, 49 углов поворота шарнирных соединений 8, 9, 10, 11, 13 и 14 установлены на бедренных 1 и 2 и голенных 3 и 4 звеньях и стопах 5 и 6.
Датчики 50, 51, 52, 53, 54, 55 угловой скорости шарнирных соединений установлены непосредственно в соответствующих шарнирных соединениях 8, 9, 10, 11, 13 и 14.
Датчики 50, 51, 52, 53, 54, 55 угловой скорости шарнирных соединений установлены на бедренных 1 и 2 и голенных 3 и 4 звеньях и стопах 5 и 6.
Датчик 56 угла наклона торса 12, соединенный с блоком 58 управления аппаратом, установлен на торсе 12 пользователя.
Каждое из тазобедренных 8 и 9 и коленных 10 и 11 шарнирных соединений выполнено с возможностью вращения соответствующих звеньев при помощи соответствующих им электродвигателей 62, 63, 64 и 65, управляющие входы которых соединены с блоком 58 управления аппаратом.
Электродвигатели 62, 63, 64 и 65 установлены непосредственно в соответствующих шарнирных соединениях.
Каждый электродвигатель 62, 63, 64 и 65 снабжен соответствующим ему датчиком 66. 67, 68 и 69 тока, подключенным к блоку 58 управления аппаратом.
Аппарат помощи при ходьбе дополнительно содержит второй 71 пульт задания режимов работы аппарата.
Первый 70 и второй 71 пульты задания режимов работы аппарата связаны с блоком 58 управления аппаратом и смонтированы на рукоятке 72 левой 25 и рукоятке 73 правой 26 ручных опор соответственно.
Аппарат содержит четыре датчика 37, 38, 39 и 40 силы реакции стопы, соединенные с 58 блоком управления аппаратом.
Первый 37 и второй 38 датчики силы реакции стопы установлены соответственно в пятке и в носке левой 5 стопы, а третий 39 и четвертый 40 датчики силы реакции стопы установлены соответственно в пятке и в носке правой 6 стопы.
Бедренные 1 и 2 и голенные 3 и 4 звенья выполнены с возможностью регулировки их продольных размеров.
Система 57 питания содержит четыре 74, 75, 76 и 77 аккумулятора, обеспечивающие работу электродвигателей 62, 63, 64 и 65, причем два из них 74 и 75 установлены в корпусах левого 1 и правого 2 бедренных звеньев, а остальные два 76 и 77 - в левой 25 и правой 26 ручных опорах.
Аппаратом помощи при ходьбе пользуются следующим образом.
Пользователь самостоятельно или при помощи ассистента надевает эккзоскелет и закрепляет его на ножных опорах 42 и 43 и торсе 12 при помощи соответствующих элементов крепления (на чертежах не показаны). Далее он берет костыли 25 и 26 и с помощью соответствующих переключателей пультов 70 и 71 управления экзоскелетом, расположенных на рукоятках 32 ручных опор 25, 26, осуществляет подачу питания от системы 57 питания на электродвигатели 62, 63. 64 и 65 и другие элементы экзоскелета. Затем с помощью соответствующих переключателей с пультов управления 70 и 71 он задает конкретный режим движения из ряда заранее предопределенных режимов.
Рассмотрим работу аппарата при передвижении его в среде с препятствиями на примере движения вверх по лестнице.
В исходном положении стопы 5 и 6 экзоскелета находятся на нижней ступени 21, а опорные концы костылей 25 и 26 находятся на верхней ступени в точках P*L и P*R упора на опорную плоскость 22 левого 25 и правого 26 костылей (фиг. 1 и 2). По срабатыванию тактильных датчиков 31 (фиг. 4) от системы питания 57 подается питание на линейки 35 и 36 светоизлучающих элементов 30.1, 30.2, … 30.N.
Благодаря тому, что стереокамеры 23 и 24 смонтированы на экзоскелете с возможностью обеспечения попадания в поле зрения стереокамер 23 и 24 по меньшей мере части ручной опоры 25 или соответственно 26 с размещенными на ней маркерными элементами 30.1, 30.2, … 30.N, в поле зрения стереокамер 23 и 24 появляются соответствующие изображения частей костылей 25 и 26 на отрезках М1М2 с излучающими свет различного цвета маркерными элементами 30.к, 30.к-1, … 30.к-q.
Исходя из того, что костыли 25 и 26 на изображении являются ближайшими к началу коорлинат OSTR системы координат XSTR, YSTR и ZSTR объектами и, воспользовавшись известными алгоритмами обработки изображений на матрице, получим матрицу с элементами, принадлежащими костылю (фиг. 5). Применив к этой матрице другие известные алгоритмы, получим матрицу дальности до элементов костыля, принадлежащими центральной оси инерции изображения костыля (фиг. 6).
Кроме того, стереокамера 23 и 24 выполнена с возможностью формирования матрицы данных о цвете элементов изображения объектов в поле зрения стереокамеры, ограниченном углами обзора αSTR и βSTR соответственно в горизонтальной и парасагиттальной плоскостях (фиг. 1 и 3). Проделав действия по выделению областей изображений маркерных элементов, аналогичные вышеописанным, получаем матрицы с изображениями светоизлучающих маркерных элементов (фиг. 7) и матрицу с изображением центров этих элементов (фиг. 8). Программным образом накладывая матрицы с фиг. 6 и 8 друг на друга, определим координаты дальности для центров маркерных элементов.
Благодаря тому, что светоизлучающие элементы 30.1, 30.2, … 30.N смонтированы в линейках 60 и 61 с постоянным шагом δ, и учитывая, что при этом первый элемент 30.1 соответствующей линейки 60 или 61 смонтирован на расстоянии δ, равном величине этого шага от опорного конца соответствующего костыля 25 или 26, для определения трехмерных координат кончика костыля достаточно данных о трехмерных координатах XSTR, YSTR и ZSTR двух элементов матриц - элемента с координатами точки M1 и светоизлучающего элемента mk.
Координаты точки P*R в системе координат вычисляются в блоке управления по формулам (1) и (2)


Пересчет координат точек Р*L и P*R из системы координат стереокамеры OSTR, XSTR, YSTR и ZSTR в систему координат, связанную с пяткой экзоскелета, осуществляется известными методами.
Таким образом, в предложенном аппарате помощи при ходьбе благодаря введенной линейке 35. 36 маркерных элементов осуществляется возможность в автоматическом режиме определять геометрические параметры препятствий по курсу движения аппарата в сагиттальной плоскости и связанные с ними геометрические параметры желательного шага - длины шага и высоты подъема пятки, что и отличает предложенный аппарат от известных и подтверждает достижение заявленного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ПОЛЬЗОВАТЕЛЮ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ | 2016 |
|
RU2620500C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| АППАРАТ ДЛЯ ПОМОЩИ ПРИ ХОДЬБЕ | 2013 |
|
RU2555801C2 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ЗАЩИТНЫЙ ЧЕХОЛ НОЖНОЙ ОПОРЫ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2639814C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2017 |
|
RU2659132C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
Аппарат относится к относится к медицинской технике, а именно к аппаратам помощи при ходьбе людей с ограниченными двигательными возможностями. Аппарат содержит левую и правую ручные опоры, снабженные инклинометрами и тактильными датчиками, смонтированными на опорных концах опор, и экзоскелет нижних конечностей, содержащий тазовое звено, левую и правую ножные опоры, каждая из которых содержит бедренное звено, голенное звено и нижнее звено в виде стопы, тазобедренные, коленные и голеностопные шарнирные соединения, элементы крепления к частям тела пользователя, установленные на каждом из звеньев, по одному датчику угла поворота и одному датчику угловой скорости каждого из шарнирных соединений, датчик угла наклона торса, стереокамеру, смонтированную на экзоскелете и выполненную с возможностью формирования матрицы данных о дальности до объектов в поле зрения стереокамеры, датчик силы реакции стопы каждой ножной опоры в вертикальном направлении, систему питания и блок управления аппаратом с пультом задания режимов работы, систему питания. При этом дополнительно первая и вторая линейки светоизлучающих маркерных элементов с заранее заданными и несовпадающими цветами излучения и заранее заданными расстояниями до опорных концов ручных опор, смонтированы на левой и правой ручных опорах. Каждый из голеностопных шарнирных соединений выполнен с возможностью вращения стопы вокруг трех осей координат. Датчики силы реакции стопы каждой ножной опоры выполнены с возможностью измерения силы реакции стопы каждой ножной опоры дополнительно в продольном направлении. Стереокамера выполнена с возможностью формирования матрицы данных о цвете элементов изображения объектов в поле зрения стереокамеры, которая смонтирована на экзоскелете с возможностью обеспечения попадания в поле зрения стереокамеры части ручной опоры с размещенными на ней маркерными элементами. Блок управления аппаратом выполнен с возможностью формирования данных о желаемых геометрических параметрах шага - желаемой длине шага и желаемой высоте подъема пятки экзоскелета, и формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета. Использование изобретения позволяет обеспечить возможность самостоятельного передвижения человека по горизонтальной и наклонной опорной поверхности, а также вверх и вниз по лестничным маршам с заранее неизвестными высотой и глубиной ступеней и переход через препятствия с заранее неизвестными высотой и протяженностью. 15 з.п. ф-лы, 9 ил.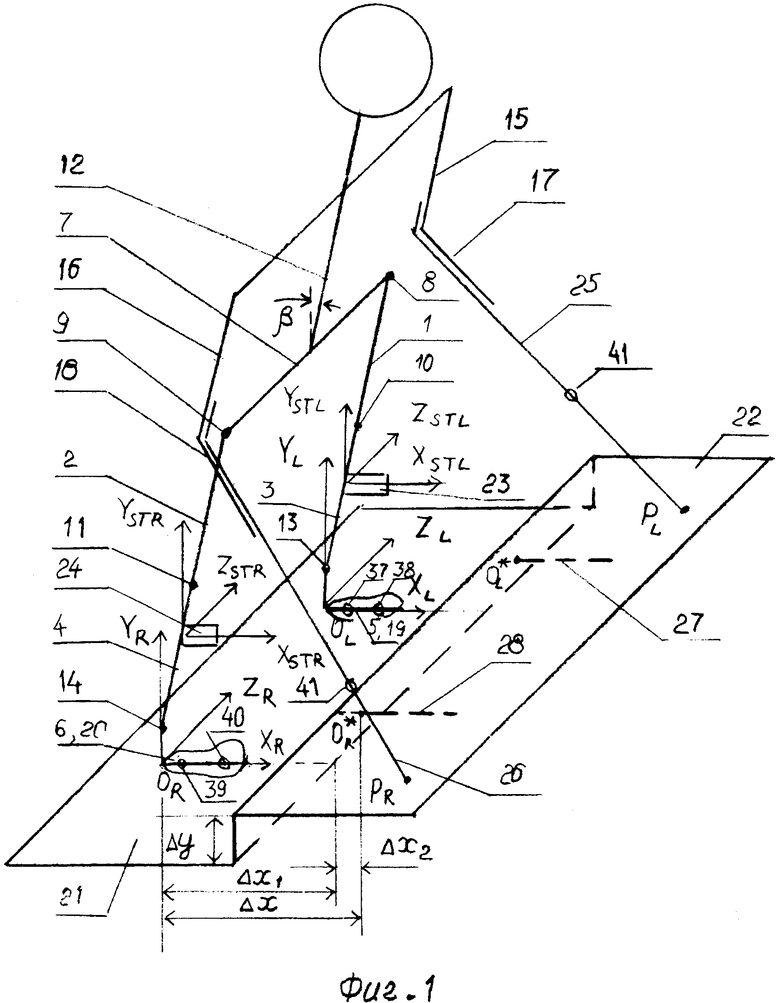
1. Аппарат помощи при ходьбе, содержащий, по меньшей мере, левую и правую ручные опоры, снабженные инклинометрами и тактильными датчиками, смонтированными на опорных концах опор, и экзоскелет нижних конечностей, содержащий, по меньшей мере, следующие звенья: тазовое звено, а также левую и правую ножные опоры, каждая из которых в свою очередь содержит бедренное звено, голенное звено и нижнее звено в виде стопы; тазобедренные, коленные и голеностопные шарнирные соединения, предназначенные для соединения между собой соответствующих смежных звеньев аппарата, при этом тазобедренные и коленные шарнирные соединения обеспечивают возможность вращения соответствующих звеньев в сагиттальной плоскости; элементы крепления к частям тела пользователя, установленные на каждом из звеньев; по меньшей мере по одному датчику угла поворота и одному датчику угловой скорости каждого из шарнирных соединений, обеспечивающим информацию об относительных поворотах и угловых скоростях звеньев аппарата; датчик угла наклона торса, обеспечивающий информацию о наклоне торса пользователя относительно вертикальной оси, посредством измерения угла наклона в сагиттальной плоскости; по меньшей мере одну стереокамеру, смонтированную на экзоскелете и выполненную с возможностью формирования матрицы данных о дальности до объектов в поле зрения стереокамеры; по меньшей мере один датчик силы реакции стопы каждой ножной опоры в вертикальном направлении; систему питания и блок управления аппаратом с пультом задания режимов работы, предназначенный для сбора измеренных сигналов со всех упомянутых выше датчиков и стереокамеры и формирования сигналов управления для выполнения движения, выбранного пользователем из набора заранее предопределенных действий с пульта задания режимов работы аппарата; систему питания, отличающийся тем, что в него введены первая и вторая линейки светоизлучающих маркерных элементов с заранее заданными и несовпадающими цветами излучения и заранее заданными расстояниями до опорных концов ручных опор, смонтированные соответственно на левой и правой ручных опорах, каждое из голеностопных шарнирных соединений выполнено с возможностью вращения стопы вокруг трех осей координат, датчики силы реакции стопы каждой ножной опоры выполнены с возможностью измерения силы реакции стопы каждой ножной опоры дополнительно в продольном направлении, стереокамера выполнена с дополнительной возможностью формирования матрицы данных о цвете элементов изображения объектов в поле зрения стереокамеры, при этом стереокамера смонтирована на экзоскелете с возможностью обеспечения попадания в поле зрения стереокамеры по меньшей мере части ручной опоры с размещенными на ней маркерными элементами, при этом блок управления аппаратом выполнен с возможностью сбора данных, полученных от вышеперечисленных датчиков и стереокамеры, формирования данных о желаемых геометрических параметрах шага - желаемой длине шага и желаемой высоте подъема пятки экзоскелета, а также формирования сигналов управления для выполнения движения с учетом масс-инерционных характеристик бедер и голеней нижних конечностей и торса тела пользователя и всех звеньев экзоскелета.
2. Аппарат по п. 1, отличающийся тем, что светоизлучающие элементы смонтированы в линейке с постоянным шагом, при этом первый элемент соответствующей линейки смонтирован на расстоянии, равном величине этого шага от опорного конца соответствующего костыля.
3. Аппарат по п. 1, отличающийся тем, что датчики углов поворота шарнирных соединений установлены непосредственно в соответствующих шарнирных соединениях.
4. Аппарат по п. 1, отличающийся тем, что датчики углов поворота шарнирных соединений установлены на бедренных и голенных звеньях.
5. Аппарат по п. 1, отличающийся тем, что датчики угловой скорости шарнирных соединений установлены непосредственно в соответствующих шарнирных соединениях.
6. Аппарат по п. 1, отличающийся тем, что датчики угловой скорости шарнирных соединений установлены на бедренных и голенных звеньях.
7. Аппарат по п. 1, отличающийся тем, что датчик угла наклона торса, соединенный с блоком управления аппаратом, установлен на торсе пользователя.
8. Аппарат по п. 1, отличающийся тем, что каждое из тазобедренных и коленных шарнирных соединений выполнено с возможностью вращения соответствующих звеньев при помощи соответствующих им электродвигателей, управляющие входы которых соединены с блоком управления аппаратом.
9. Аппарат по п. 8, отличающийся тем, что электродвигатели установлены непосредственно в соответствующих шарнирных соединениях.
10. Аппарат по п. 6, отличающийся тем, что каждый электродвигатель снабжен соответствующим ему датчиком тока, подключенным к блоку управления аппаратом.
11. Аппарат по п. 1, отличающийся тем, что дополнительно содержит второй пульт задания режимов работы аппарата.
12. Аппарат по п. 1, отличающийся тем, что первый и второй пульты задания режимов работы аппарата связаны с блоком управления аппаратом и смонтированы на рукоятке левой и правой ручных опор соответственно.
13. Аппарат по п. 1, отличающийся тем, что содержит четыре датчика силы реакции стопы, соединенные с блоком управления аппаратом.
14. Аппарат по п. 10, отличающийся тем, что первый и второй датчики силы реакции стопы установлены соответственно в пятке и в носке левой стопы, а третий и четвертый датчики силы реакции стопы установлены соответственно в пятке и в носке правой стопы.
15. Аппарат по п. 1, отличающийся тем, что бедренные и голенные звенья выполнены с возможностью регулировки их продольных размеров.
16. Аппарат по п. 1, отличающийся тем, что система питания содержит четыре аккумулятора, обеспечивающие работу электродвигателей, причем два из них установлены в корпусах левого и правого бедренных звеньев, а остальные два - в левой и правой ручных опорах.
| US 9295604 B2, 29.03.2016 | |||
| Ситогидроциклонная установка для очистки не утяжеленных промывочных растворов | 1959 |
|
SU139266A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 5961476 A, 05.10.1999. | |||

