Изобретение относится к области геофизических исследований, а именно к статическим способам определения ускорения силы тяжести, и может быть использовано для определения ускорения силы тяжести в море на надводных судах и подводных объектах с повышенной точностью на отдаленных акваториях мирового океана.
Известен статический способ определения ускорения силы тяжести в море, включающий измерение параметра, характеризующего перемещение подвижного элемента упругой системы гравиметра относительно исходного (нулевого) положения датчиком малых перемещений гравиметра на гравиметрическом опорном и на «i» определяемом пункте, определение поправки за смещение нуль-пункта гравиметра, обусловленное изменением характеристик чувствительного элемента упругой системы гравиметра, проявляющихся в изменении его длины, определение эталонированием соответствующее известному приращению ускорению силы тяжести в миллигалах приращение измеренного параметра и по полученным данным вычисление искомого значения ускорения силы тяжести (см. Гравиразведка. Справочник геофизика. М.: «Недра», 1981, с.29-48).
Однако данный статический способ определения ускорения силы тяжести в море имеет недостаточно высокую точность, так как при его использовании имеет место погрешность определения ускорения силы тяжести за счет непостоянства смещения нуль-пункта статического гравиметра, обусловленное в основном изменением длины чувствительного элемента упругой системы гравиметра под воздействием нагрузки на нее и изменением температуры и градиента температуры (см. Юзефович А.П., Огородова Л.В. Гравиметрия. М.: «Недра», 1980, с.106-109).
Эта погрешность имеет место при использовании известного статического способа определения ускорения силы тяжести в море из-за того, что смещение нуль-пункта гравиметра в настоящее время представляется возможным определить и учесть только лишь по наблюдениям за изменением показаний гравиметра на гравиметрическом опорном пункте в начале и по окончании гравиметрической съемки или на системе пунктов с известным значением ускорения силы тяжести (см. Попов Е.И. Определение силы тяжести на подвижном основании. Издательство «Наука», 1967, с.170).
Такой учет смещения нуль-пункта гравиметра может быть эффективным при условии, что оно изменяется во времени по известному закону.
Однако величина и знак кратковременных уходов нуль-пункта современных статических гравиметров меняется случайным образом в зависимости от условий работы и может достигать 2 мгал (см. Труды Центрального НИИ геодезии, аэросъемки и картографии, выпуск 208. Исследования по гравиметрии. М.: 1975, с.44), а в отдельных случаях происходит скачкообразное изменение значений нуль-пункта гравиметра, достигающее порой 6-7 мгал (см. Попов Е.И. Определение силы тяжести на подвижном основании. Издательство «Наука», 1967, с.172-175).
Следовательно, погрешность определения ускорения силы тяжести за счет непостоянства смещения нуль-пункта гравиметра может в отдельных случаях достигать при использовании известного статического способа определения ускорения силы тяжести в море 6-7 мгал.
Допустимая погрешность определения ускорения силы тяжести в море в соответствии с действующими нормативными документами по гравиметрической съемке (Единое техническое требование по Мировой гравиметрической съемке. Часть IV. Инструкция по морской гравиметрической съемке (ИГ-78). Л.: изд. ГУНиО МО СССР, 1979, с.6-7) не должна превышать 1 мгал.
Кроме того, известный статический способ определения ускорения силы тяжести на определяемых пунктах, расположенных в море, имеет низкую производительность, так как при его использовании необходимо прекращать гравиметрическую съемку в соответствии с требованиями нормативных документов по определению ускорения силы тяжести в море (см. там же) и через 10-15 суток заходить в порты, где имеются гравиметрические опорные пункты, для выполнения гравиметрических измерений в течение нескольких суток с целью получения данных для вычисления поправки за смещения нуль-пункта гравиметра.
Данное действие существенно снижает производительность известного статического способа определения ускорения силы тяжести в море, особенно при выполнении гравиметрической съемки в отдаленных районах Мирового океана.
Целью настоящего изображения являются повышение точности, производительности и упрощение процесса определения ускорения силы тяжести в море.
Указанная цель достигается тем, что в известном статическом способе определения ускорения силы тяжести в море, включающем измерение параметра, характеризующего перемещение подвижного элемента упругой системы гравиметра относительно исходного (нулевого) положения, датчиком малых перемещений гравиметра на гравиметрическом опорном и на i определяемом пунктах, определение поправки за смещение нуль-пункта гравиметра, обусловленное изменением длины чувствительного элемента упругой системы гравиметра, определение эталонированием на опорном гравиметрическом пункте соответствующее известному приращению ускорения силы тяжести в миллигалах приращение измеренного параметра и по полученным данным вычисление искомого значения ускорения силы тяжести, дополнительно измеряют длину чувствительного элемента, например, интерференционным методом, на гравиметрическом опорном и на i определяемом пунктах при нахождении подвижного элемента на максимальном отклонении от исходного (нулевого) и в исходном (нулевом) положениях, определяют эталонированием на опорном гравиметрическом пункте, соответствующее известному приращению силы тяжести Δg в миллигалах приращение длины ΔL чувствительного элемента, а поправку Δgci за смещение нуль-пункта гравиметра к приращению ускорения силы тяжести, измеренному гравиметром на i определяемом пункте, вычисляют по формуле

где L0 и Li - длина чувствительного элемента, измеренная на гравиметрическом опорном и на i определяемом пунктах соответственно при нахождении подвижного элемента в исходном (нулевом) положении,
N - число измерений L0 и Li за период осреднения соответственно.
Вывод формулы (I), исходя из сущности заявленного способа, можно произвести следующим образом.
Так как измерение L0 и Li производят при нахождении подвижного элемента в исходном (нулевом) положении, в котором отсутствует упругая его деформация, то вполне понятно, что разность (L0 -Li) характеризует только лишь приращение длины чувствительного элемента гравиметра за счет его остаточной деформации, обусловленной воздействием нагрузки на него, изменением температуры и градиента температуры в течение промежутка времени между измерениями L0 и Li.
Следовательно, разность (L0 -Li) характеризует поправку за смещение нуль-пункта гравиметра в i определенном пункте, но только в линейной мере.
Для перевода приращения длины (L0 -Li.) в миллигалы необходимо определить коэффициент перевода k. Этот коэффициент по анологии с ценой деления отсчетного устройства гравиметра можно определить эталонированием по отношению
 ,
,
где Δg - известное приращение силы тяжести в миллигалах;
ΔL - соответствующее Δg приращение длины чувствительного элемента.
На основании вышеизложенного поправку Δgci за смещение нуль-пункта гравиметра в i определяемом пункте в миллигалах можно вычислить по формуле (1).
На чертеже схематически изображен предложенный статический способ определения ускорения силы тяжести в море и принципиальная схема статического гравиметра, позволяющего реализовать заявленный способ.
Данный статический гравиметр содержит функционально соединенные астазированную кварцевую чувствительную систему с жидкостным демпфированием и точкой подвеса - 0, включающую чувствительный элемент - 1, выполненный в виде закрученной кварцевой нити, к которой приварен рычаг - 2 с массой - 3 (кварцевая нить закручена на такой угол, чтобы рычаг - 2 был в горизонтальной плоскости); датчик малых перемещений массы от исходного (нулевого) положения, состоящий из зеркала - 4, расположенного на рычаге - 2, источника света - 5, последовательно соединенных дифференциального фоторегистратора - 6, мостовой схемы - 7, фильтра - 8 и усилителя - 9; устройство для приведения массы - 3 в исходное (нулевое) положение, выполненное, например, в виде следующей системы, включающей функционально соединенные реле - 10, двигатель - 11, редуктор - 12, микрометрический винт - 13, пружины - 14, потенциометр - 15; форсирующее устройство, состоящее из пластины - 16, укрепленной на рычаге - 2, и параллельных ей пластин - 17, связанных с микрометрическим винтом - 13; датчик длины чувствительного элемента, выполненный, например, в виде интерферометра типа Майкельсона, состоящий из функционально соединенных источника излучения - лазера - 18, электронной системы стабилизации частоты излучения - 19, полупрозрачных зеркал - 20 и 21, установленных под углом 45° к направлению луча, отражательного зеркала - 22, диаграммы - 23, фотоумножителя - 24, усилителя - 25, счетчика - 26 и генератора эталонной частоты - 27; вычислительное устройство - 28 и регистратор - 29.
Выполнение датчика длины кварцевого чувствительного элемента, погруженного в демпфирующую жидкость - 30, в виде лазерного интерферометра типа Майкельсона представляется возможным благодаря тому, что через кварц, как известно, проходит свет и его прозрачность значительно больше прозрачности демпфирующей жидкости, то есть кварцевый чувствительный элемент, помещенный в демпфирующую жидкость с меньшей чем у кварца прозрачностью, будет являться световодом.
Определение ускорения силы тяжести заявленным статическим способом производят следующим образом.
В начале на гравиметрическом опорном, а затем на определяемом «i» пункте, расположенном в море, измеряют параметр, характеризующий перемещение подвижного элемента упругой системы гравиметра относительного исходного (нулевого) положения, например, угол поворота рычага - 2 с массой - 3 относительно горизонтальной плоскости, датчиком малых перемещений массы от исходного (нулевого) положения и длину кварцевого чувствительного элемента в моменты, когда отсчет на датчике малых перемещений равен «0» и максимальному значению «max», то есть в моменты нахождения подвижного элемента упругой системы в исходном (нулевом) и максимально отключенном от исходного (нулевого) положения датчиком длины чувствительного элемента гравиметра.
В базе определяют эталонированием коэффициент  ,
,
являющейся ценой деления отсчетного устройства датчика длины гравиметра, и цену деления C отсчетного устройства датчика малых перемещений гравиметра.
Предлагаемое техническое решение является «новым», поскольку из общедоступных сведений не известен статический способ определения ускорения силы тяжести в море, включающей вышеизложенную совокупность операций.
Предлагаемое техническое решение имеет «изобретательский уровень», поскольку из опубликованных научных данных и известных технических решений явным образом не следует, что заявленная последовательность операций предлагаемого способа определения ускорения силы тяжести в море повышает его точность и производительность и упрощает процесс определения силы тяжести в море.
Предлагаемое техническое решение промышленно применимо, так как для его реализации могут быть использованы стандартное оборудование и приспособления, используемые для изготовления морских приборов и технических средств.
По полученным данным в вычислительном устройстве - 28 определяют искомое значение ускорения силы тяжести gui на i определяемом пункте по формуле

где g0 - значение силы тяжести на гравиметрическом опорном пункте;
Δgi - величина приращения силы тяжести относительно g0, измеренная гравиметром на i определяемом пункте.
Значение Δgi, исходя из сущности заявленного способа и принципа работы вышеизложенного гравиметра, можно вычислить по формуле

где n0, ni - параметр, характеризующий перемещение подвижного элемента упругой системы гравиметра, измеренный датчиком малых перемещений на гравиметрическом опорном и i определяемом пунктах соответственно;
L0, LI - длина чувствительного элемента упругой системы гравиметра, измеренная датчиком длины на гравиметрическом опорном и на i определяемом пунктах при нахождении подвижного элемента упругой системы гравиметра в исходном (нулевом) положении соответственно;
LM, LMi - длина чувствительного элемента упругой системы гравиметра, измеренная датчиком длины на гравиметрическом опорном и i определяемом пунктах при нахождении подвижного элемента упругой системы гравиметра на максимально отклоненном от исходного (нулевого) положения соответственно;
N - число измерений датчиками гравиметра на гравиметрическом опорном и i определяемом пунктах за период осреднения соответственно.
Формулу (3) можно вывести следующим образом.
Так как гравиметр, реализующий заявленный способ, имеет два независимых друг от друга датчика, которые измеряют отличающиеся друг от друга параметры, характеризующие перемещение подвижного элемента упругой системы гравиметра относительно исходного (нулевого) положения, то по каждому из них можно вычислить приращение ускорения силы тяжести в i определяемом пункте относительно известного ускорения силы тяжести на гравиметрическом пункте.
Так, из гравиметрии известно, что по значениям n0 и ni можно вычислить приращение  ускорения силы тяжести на i определяемом пункте по формуле
ускорения силы тяжести на i определяемом пункте по формуле

где Δgci - поправка за смещение нуль-пункта гравиметра на i определяемом пункте.
Значение Δgci, как обосновано выше, можно вычислить по формуле

С учетом формулы (4) приращение  ускорения силы тяжести на i определяемом пункте по значениям L0, LM, LI, LMi можно вычислить по формуле
ускорения силы тяжести на i определяемом пункте по значениям L0, LM, LI, LMi можно вычислить по формуле

Следует отметить, что в значении  отсутствует поправка за смещение нуль-пункта гравиметра, так как промежуток времени между измерениями L0 и LM и между измерениями LI и LMi мал (составляет доли секунды), то в моменты измерений L0, LM остаточную деформацию чувствительного элемента можно считать равной, и в моменты измерения LI и LMi также ее можно считать равной, а следовательно, в разностях L0-LM и LI-LMi она отсутствует.
отсутствует поправка за смещение нуль-пункта гравиметра, так как промежуток времени между измерениями L0 и LM и между измерениями LI и LMi мал (составляет доли секунды), то в моменты измерений L0, LM остаточную деформацию чувствительного элемента можно считать равной, и в моменты измерения LI и LMi также ее можно считать равной, а следовательно, в разностях L0-LM и LI-LMi она отсутствует.
С учетом формул (4) и (6) значение Δgi можно вычислить по формуле

Подставляя в формулу (7) правые части формул (4), (5) и (6), получим формулу (3).
Погрешность mgn определения ускорения силы тяжести заявленным способом можно вычислить по формуле

где m0 - погрешность определения ускорения силы тяжести на гравиметрическом опорном пункте;
mΔg - погрешность определения Δgi;
mΔgc - погрешность определения Δgc.
Значение mΔg представляется возможным вычислить по известной формуле погрешности определения параметра поля по разности двойных измерений

где Δi - разности сличаемых значений Δgi, и Δgi+1;
i=1, 2, …, n - порядковый номер разности значений Δg;
n - количество пар сличаемых значений  и .
и .
Из формулы (9) видно, что даже при n равном 1 погрешность определения Δgi примерно в 1.5 раза меньше в заявленном способе по сравнению с известными способами, в которых Δgi вычисляется только лишь по отсчетам датчика малых перемещений гравиметра.
Значение mΔgc можно вычислить по формуле

где mk - погрешность определения k эталонированием;
mΔLc - погрешность определения ΔLc=L0-Li.
Например, когда mk=0.018 мгал (точность эталонирования современных гравиметров (см. Огородова Л.В. и др. Гравиметрия. М.: «Недра», 1978, с.135));
 см (погрешность определения длины с помощью интерферометра Майкельсона составляет 5·10-9 см) (см. Труды Центрального НИИ геодезии, аэросъемки и картографии, выпуск 208. Исследования по гравиметрии. М.: 1975, с.24), то mΔgc составит 0.02 мгал.
см (погрешность определения длины с помощью интерферометра Майкельсона составляет 5·10-9 см) (см. Труды Центрального НИИ геодезии, аэросъемки и картографии, выпуск 208. Исследования по гравиметрии. М.: 1975, с.24), то mΔgc составит 0.02 мгал.
Если учесть, что допустимая погрешность определения ускорения силы тяжести в море составляет 1 мгал, то согласно закону наименьшего влияния, погрешностью mΔgc, равной 0.02 мгал, можно пренебречь.
Технико-экономическая эффективность заявленного способа заключается в следующем:
1. Значительное повышение точности определения ускорения силы тяжести, так как при его реализации представляется возможным:
- с необходимой точностью определить и учесть поправку за смещение нуль-пункта гравиметра в море в процессе выполнения гравиметрической съемки, которая, как известно, может достигать 2 мгал, а в отдельных случаях 6-7 мгал и имеет нелинейную изменчивость во времени;
- определить примерно в 1.5-2 раза точнее Δgi, так как Δgi определяется по независимым отсчетам двух датчиков - датчика малых перемещений и датчика длины чувствительного элемента упругой системы гравиметра;
2. Повышение производительности и упрощение процесса определения ускорения силы тяжести в море, особенно в отдаленных районах Мирового океана, так как при его использовании отсутствует трудоемкое, сложное, требующее затраты большого количества рабочего времени действие:
- необходимость осуществления заходов через 15-20 суток в порты, где имеются гравиметрические опорные пункты, для производства сложных гравиметрических измерений в течение нескольких суток с целью получения данных для вычисления поправки за смещения нуль-пункта гравиметра.
Источники информации
1. Гравиразведка. Справочник геофизика. М.: «Недра», 1981.
2. Юзефович А.П., Огородова Л.В. Гравиметрия. М.: «Недра», 1980.
3. Попов Е.И. Определение силы тяжести на подвижном основании. Издательство «Наука», 1967.
4. Труды Центрального НИИ геодезии, аэросъемки и картографии, выпуск 208. Исследования по гравиметрии. М.: 1975.
5. Единое техническое требование по Мировой гравиметрической съемке. Часть IV. Инструкция по морской гравиметрической съемке (ИГ-78). Л. изд. ГУНиО МО СССР, 1979.
6. Огородова Л.В. и др. Гравиметрия. М.: «Недра», 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАТИЧЕСКИЙ ГРАВИМЕТР | 2009 |
|
RU2427008C2 |
| СПОСОБ МОРСКОЙ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2010 |
|
RU2440592C2 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2575316C1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Способ измерения гравитационного поля Земли | 2020 |
|
RU2737034C1 |
| Способ морской гравиметрической съемки и устройство для его осуществления | 2020 |
|
RU2767153C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ НА ДВИЖУЩЕМСЯ ОБЪЕКТЕ | 2010 |
|
RU2426154C1 |
| АЭРОГРАВИМЕТРИЧЕСКИЙ КОМПЛЕКС | 1996 |
|
RU2090911C1 |
| СПОСОБ ГРАВИМЕТРИЧЕСКОЙ СЪЕМКИ | 2018 |
|
RU2679643C1 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ АНОМАЛИЙ СИЛЫ ТЯЖЕСТИ | 1998 |
|
RU2143124C1 |
Изобретение относится к области геофизики и может быть использовано для определения ускорения силы тяжести в море на надводных и подводных объектах. Согласно изобретению статический способ определения ускорения силы тяжести в море включает измерение параметра, характеризующего перемещение подвижного элемента упругой системы гравиметра относительно исходного положения на гравиметрическом опорном и на определяемом пунктах, определение поправки за смещение нуль-пункта гравиметра, определение эталонированием на опорном гравиметрическом пункте соответствующее известному приращению ускорения силы тяжести приращение измеренного параметра и по полученным данным вычисление искомого значения ускорения силы тяжести. Особенность способа заключается в том, что для определения поправки за смещение нуль-пункта гравиметра дополнительно измеряют длину чувствительного элемента упругой системы гравиметра при нахождении подвижного элемента на максимально отклоненном от исходного и в исходном положениях и определяют эталонированием на опорном гравиметрическом пункте соответствующее известному приращению силы тяжести приращение длины чувствительного элемента упругой системы гравиметра. Это позволяет упростить процесс определения ускорения силы тяжести в море и повысить его точность и производительность. 1 ил.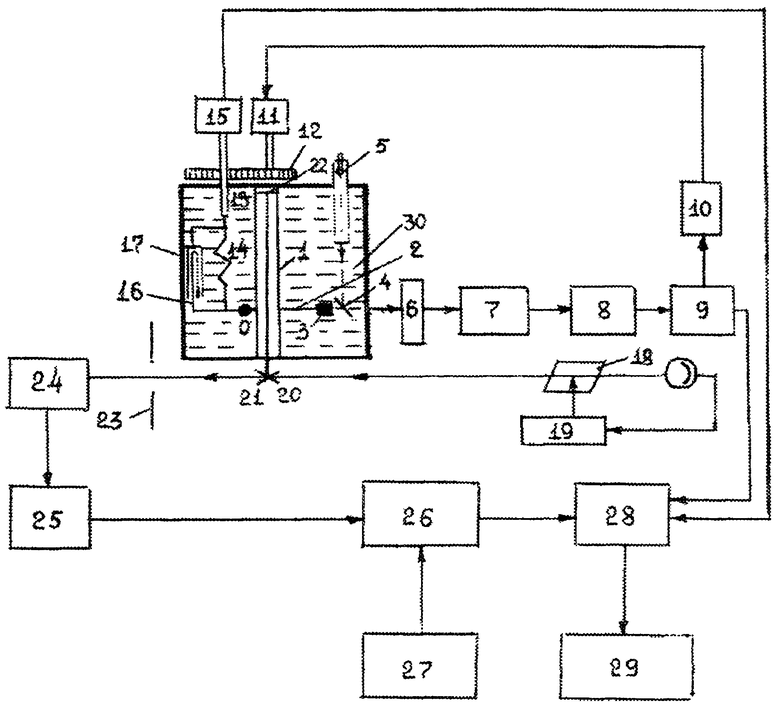
Статический способ определения ускорения силы тяжести в море, включающий измерение параметра, характеризующего перемещение подвижного элемента упругой системы гравиметра относительно исходного (нулевого) положения датчиком малых перемещений гравиметра на гравиметрическом опорном и на «i» определяемом пунктах, определение поправки на смещение нуль-пункта гравиметра, определение эталонированием на опорном гравиметрическом пункте соответствующее известному приращению ускорения силы тяжести в миллигалах приращение измеренного параметра и по полученным данным вычисление искомого значения ускорения силы тяжести, отличающийся тем, что дополнительно измеряют длину чувствительного элемента упругой системы гравиметра, например, интерференционным методом на гравиметрическом опорном и на «i» определяемом пунктах при нахождении подвижного элемента на максимально отклоненном от исходного (нулевого) и в исходном (нулевом) положениях, определяют эталонированием на опорном гравиметрическом пункте соответствующее известному приращению силы тяжести в миллигалах приращение длины чувствительного элемента упругой системы гравиметра.
| Гравиразведка // Справочник геофизика | |||
| - М.: Недра, 1981, с.29-48 | |||
| Способ определения масштабных коэффициентов морского гравиметра с двойной упругой системой крутильного типа | 1983 |
|
SU1092456A1 |
| КВАРЦЕВЫЙ ГРАВИМЕТР | 2000 |
|
RU2171481C1 |
| Способ изготовления полых изделий | 1984 |
|
SU1278067A1 |
| ГРАВИМЕТР | 2003 |
|
RU2253138C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Исследования по гравиметрии // Труды ЦНИИГАиК | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Юзефович А.П., Огородова Л.В | |||
| Гравиметрия | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |

