Изобретение относится к авиационной технике и может быть использовано для повышения точности определения на борту летательного аппарата (ЛА) вертикальной скорости и барометрической высоты полета.
В описании использованы следующие сокращения:
ЛА - летательный аппарат,
СВС - система воздушных сигналов,
ПВД - приемник воздушных давлений,
ИНС - инерциальная система,
СНС - спутниковая навигационная система,
ВТИ - внешнетраекторные измерения.
Прототипом изобретения является способ определения барометрической высоты и вертикальной скорости, на котором основано функционирование устройства, описанного в патенте США 4882697. В способе используют комплексирование значений вертикального ускорения от ИНС и значений приборной барометрической высоты, вычисляемой по сигналу датчика статического давления. Для обработки упомянутых величин применяют алгоритм "баро-инерциальный фильтр", структурная схема которого приведена на фиг.1. На схеме приняты следующие обозначения:
AZ, BZ - входные значения вертикального ускорения и приборной барометрической высоты,
VZ, PZ - выходные значения оценок вертикальной скорости и барометрической высоты фильтра,
 - интеграторы, ⊗ - сумматоры,
- интеграторы, ⊗ - сумматоры,
G1, G2, G3 и G6 - коэффициенты усиления.
С помощью ИНС измеряют вертикальное ускорение, а с помощью датчика статического давления - барометрическую высоту. Выходные значения вертикальной скорости VZ формируют интегрированием вертикального ускорения. При этом вводят коррекцию и в качестве интегрируемой величины используют разность между значением вертикального ускорения AZ и поправкой ускорения S7. Выходные значения высоты PZ формируют интегрированием разности вертикальной скорости VZ и поправкой скорости S5. Кроме того, учитывают физически существующее запаздывание во входном сигнале приборной барометрической высоты BZ путем пропускания сигнала высоты PZ через "схему задержки" (на фиг.1 состоящую из блоков 290, 292, 294 с отрицательной обратной связью 295). Сигнал S6 на выходе "схемы задержки" представляет собой "задержанный" сигнал PZ.
Поправки ускорения S7 и вертикальной скорости S5 определяют по сигналу рассогласования Е, представляющего собой разность между сигналами S6 и BZ. Составляющую S3 поправки ускорения S7 и поправку вертикальной скорости S5 формируют умножением сигнала рассогласования Е соответственно на коэффициенты усиления G2 и G1. Составляющую S1 сигнала коррекции ускорения S7 формируют интегрированием сигнала Е и умножением результата на коэффициент усиления G3. Сигнал S1 обеспечивает компенсацию постоянной или медленно изменяющейся погрешности в сигнале AZ (т.е. погрешности типа "дрейф нуля акселерометра").
Рассмотренный способ при правильном определении коэффициентов G1, G2, G3, G6 должен обеспечить точное вычисление вертикальной скорости и высоты за счет компенсации погрешностей во входных сигналах AZ и BZ. Однако анализ показывает, что он обладает следующими недостатками:
- в соответствии с теорией фильтрации (например, с теорией фильтра Калмана), коэффициенты усиления в обратных связях фильтра определяются погрешностями входных сигналов (т.е. погрешностями измерений приборной барометрической высоты и вертикального ускорения). Ввиду того, что погрешности измерения входных сигналов на разных типах ЛА различны, коэффициенты G1, G2, G3, G6 баро-инерциального фильтра на разных типах ЛА должны быть разными. Особенно это относится к ЛА с бортовыми ПВД, на которых спектр погрешностей измерения барометрической высоты сильно зависит от аэродинамической компоновки конкретного ЛА, места установки ПВД на фюзеляже ЛА и режимов полета. В описанной схеме не отражен механизм определения коэффициентов G1, G2 и G3 применительно к характеристикам конкретного типа ЛА, и, следовательно, ее использование для практических целей приведет к повышенным погрешностям измерения вертикальной скорости и высоты;
- не раскрыт механизм определения значения коэффициента G6;
- в используемой схеме отсутствует отрицательная обратная связь между сигналом рассогласования Е и сигналом PZ с коэффициентом усиления, который должен настраиваться (вместе с коэффициентами G1, G2 и G3) на характеристики входных сигналов AZ и BZ. Необходимость введения такой обратной связи следует из приведенных далее уравнений фильтра Калмана.
Что касается коэффициента G6, то он может быть определен с использованием следующих известных источников. Приведенная на фиг.1 "схема задержки", состоящая из блоков 290, 292, 294, охваченных отрицательной обратной связью 295, имитирующая запаздывание во входном сигнале BZ, эквивалентна апериодическому звену  , где λH=1/G6 (см. "Теория автоматического управления", часть 1 "Теория линейных систем автоматического управления". Под ред. Воронова А.А.. Уч. пособие для вузов, М., "Высшая школа", 1977, стр.45). Известно, что основной причиной запаздывания в сигнале измеренной барометрической высоты BZ является запаздывание в пневмотракте статического давления, которое хорошо описывается апериодическим звеном [Котик М.Г., Павлов А.В. и др. Летные испытания самолетов. - М.: Машиностроение, 1968, с.55-59] с постоянной времени, равной коэффициенту запаздывания в тракте измерения статического давления λH, зависящему от давления и температуры наружного воздуха в соответствии с формулой:
, где λH=1/G6 (см. "Теория автоматического управления", часть 1 "Теория линейных систем автоматического управления". Под ред. Воронова А.А.. Уч. пособие для вузов, М., "Высшая школа", 1977, стр.45). Известно, что основной причиной запаздывания в сигнале измеренной барометрической высоты BZ является запаздывание в пневмотракте статического давления, которое хорошо описывается апериодическим звеном [Котик М.Г., Павлов А.В. и др. Летные испытания самолетов. - М.: Машиностроение, 1968, с.55-59] с постоянной времени, равной коэффициенту запаздывания в тракте измерения статического давления λH, зависящему от давления и температуры наружного воздуха в соответствии с формулой:
где рH и TH - давление и температура воздуха на текущей высоте полета,
λ0 - коэффициент запаздывания в пневмотракте измерения статического давления на уровне земли, определяемый для каждого типа ЛА в наземных работах по специальной методике (изложенной там же),
Т0=288,15K, p0=760 мм рт.ст. - температура и давление воздуха на уровне земли по стандартной атмосфере (см. ГОСТ 4401-81 "Стандартная атмосфера. Параметры").
Таким образом, из уровня техники следует, что неопределенный в схеме на фиг.1 коэффициент G6 является обратной величиной к коэффициенту запаздывания λH, вычисляемого для каждого конкретного типа ЛА по формуле (1).
Задачей изобретения является минимизация погрешностей определения вертикальной скорости и барометрической высоты путем проведения летных испытаний ЛА с целью измерения ряда параметров и модификации математического аппарата для обработки результатов измерений.
Для решения задачи предлагается способ определения барометрической высоты и вертикальной скорости, в котором измеряют вертикальное ускорение и с помощью датчика статического давления приборную барометрическую высоту, значения вертикальной скорости получают путем интегрирования разности вертикального ускорения и поправки ускорения, значения барометрической высоты получают путем интегрирования разности вертикальной скорости и поправки скорости, разность между полученным таким образом значением барометрической высоты с учетом поправки на запаздывание в пневмотракте статического давления и значением приборной барометрической высоты, определенным с помощью датчика статического давления, используют для вычисления упомянутых поправок ускорения и скорости с использованием коэффициентов, усиления, отличающийся тем, что не более чем за три часа до начала летных испытаний выполняют зондирование атмосферы, по результатам которого определяют зависимости температуры и давления воздуха от геометрической высоты, затем выполняют летные испытания летательного аппарата на режимах, состоящих из участков горизонтального полета, набора высоты и снижения, при этом диапазон высот разбивают на несколько поддиапазонов и испытания проводят в каждом из поддиапазонов, во время испытаний синхронно измеряют вертикальное ускорение, приборную барометрическую высоту, эталонную вертикальную скорость и геометрическую высоту, по измеренным значениям с использованием зависимостей, полученных при зондировании атмосферы, вычисляют оптимальный набор коэффициентов усиления, выполняя математическое моделирование баро-инерциального фильтра в каждом из упомянутых поддиапазонов высот, для чего формируют массивы измерений зарегистрированных сигналов вертикального ускорения, приборной барометрической высоты, геометрической высоты и эталонной вертикальной скорости, вычисляют значения барометрической высоты и коэффициент запаздывания в пневмотракте, моделирование фильтра в каждом поддиапазоне высот выполняют при различных значениях вектора коэффициентов усиления, включающего четыре компонента К1, К2, К3 и К4, для каждого вектора усиления вычисляют массивы модельных значений вертикальной скорости и барометрической высоты, а также значение минимизируемой функции, характеризующей отклонение модельных значений вертикальной скорости или барометрической высоты от их эталонных значений, в качестве оптимального вектора коэффициентов усиления используют вектор, соответствующий минимальному значению минимизируемой функции, а в качестве результирующего принимают вектор, каждый из четырех компонентов которого аппроксимируют по значениям этого компонента в каждом поддиапазоне высот.
Упомянутую поправку ускорения находят как сумму умноженной на коэффициент К2 упомянутой разности высот и умноженного на коэффициент К3 результата интегрирования той же упомянутой разности высот, в качестве упомянутой поправки скорости принимают умноженную на коэффициент K1 ту же упомянутую разность высот.
Значения барометрической высоты с учетом поправки на запаздывание находят путем вычисления разности между полученным путем интегрирования, как упомянуто, значением барометрической высоты и поправкой высоты, которая равна умноженной на коэффициент К4 упомянутой разности высот, и последующего учета запаздывания с помощью апериодического звена с постоянной времени, равной коэффициенту запаздывания в пневмотракте измерения статического давления λН, определенным по формуле
где pH и TH - давление и температура воздуха на текущей высоте полета, λ0 - коэффициент запаздывания на уровне земли, Т0=288,15К, р0=760 мм рт.ст.
Как вариант, при оптимизации коэффициентов в качестве минимизируемой функции выбирают среднее значение квадрата погрешности измерения вертикальной скорости.
Как вариант, при оптимизации коэффициентов в качестве минимизируемой функции выбирают максимальное значения модуля погрешности измерения вертикальной скорости.
Как вариант, при оптимизации коэффициентов в качестве минимизируемой функции выбирают среднее значение квадрата погрешности измерения барометрической высоты.
Как вариант, при оптимизации коэффициентов в качестве минимизируемой функции выбирают максимальное значение модуля погрешности измерения барометрической высоты.
Изобретение позволяет осуществлять более точное определение вертикальной скорости и барометрической высоты, т.к. косвенно учитывает тип ЛА, режим полета и влияние других неслучайных факторов.
Изобретение поясняется чертежами.
На фиг.1 приведена структурная схема, используемая в прототипе.
На фиг.2 приведена структурная схема, используемая в предлагаемом способе.
На фиг.3 приведены графики погрешностей модельного сигнала вертикальной скорости, иллюстрирующие процедуру оптимизации вектора коэффициентов усиления предлагаемым способом.
Предлагаемый способ определения вертикальной скорости и барометрической высоты осуществляют в соответствии со структурной схемой, приведенной на фиг.2, которая представляет баро-инерциальный фильтр. В нем, так же, как и в прототипе, осуществляют следующие действия. Измеряют вертикальное ускорение Ау и приборную барометрическую высоту НПРИБ, причем НПРИБ измеряют с помощью датчика статического давления (см. приложение к ГОСТ 3295-73, стр.74, формулы 1.1.1.-1.2.2 для вычисления геопотенциальной высоты). Из величины вертикального ускорения Ау вычитают в блоке 1 поправку ускорения и путем интегрирования в блоке 2 получают значения вертикальной скорости  , из которых вычитают в блоке 3 поправку вертикальной скорости и интегрируют в блоке 4 для получения значений высоты
, из которых вычитают в блоке 3 поправку вертикальной скорости и интегрируют в блоке 4 для получения значений высоты  . Поправки определяют следующим образом. Из полученного в результате интегрирования значения высоты вычитают в блоке 5 поправку высоты и используют для учета запаздывания в пневмотракте статического давления в блоке 6, на выходе которого формируется высота с запаздыванием в пневмотракте
. Поправки определяют следующим образом. Из полученного в результате интегрирования значения высоты вычитают в блоке 5 поправку высоты и используют для учета запаздывания в пневмотракте статического давления в блоке 6, на выходе которого формируется высота с запаздыванием в пневмотракте  . Разность ν на выходе блока 7 между высотой и измеряемой приборной высотой НПРИБ используют для вычисления поправок. Поправку ускорения определяют в блоке 8 как сумму умноженной на коэффициент К2 величины ν и умноженного на коэффициент К3, результата интегрирования в блоке 9 величины ν. Поправки скорости и высоты пропорциональны величине v с коэффициентами К1 и К4 соответственно.
. Разность ν на выходе блока 7 между высотой и измеряемой приборной высотой НПРИБ используют для вычисления поправок. Поправку ускорения определяют в блоке 8 как сумму умноженной на коэффициент К2 величины ν и умноженного на коэффициент К3, результата интегрирования в блоке 9 величины ν. Поправки скорости и высоты пропорциональны величине v с коэффициентами К1 и К4 соответственно.
Реализация предлагаемого способа предполагает проведение летных испытаний с целью определения оптимального набора коэффициентов, используемых при определении вертикальной скорости и барометрической высоты в последующих полетах при реализации баро-инерциального фильтра с этими коэффициентами.
Поэтому выполняют следующие действия.
1. Не более чем за 3 ч до начала летных испытаний ЛА выполняют зондирование атмосферы (измерение температуры и давления воздуха на различных высотах), по результатам зондирования определяют зависимости температуры и давления воздуха от геометрической высоты НГ:
ТН=FН(HГ)
и pH=FН(HГ).
2. Проводят летные испытания ЛА, в процессе которых выполняют режимы полета, состоящие из горизонтальных участков и участков набора высоты и снижений общей длительностью ˜10...20 мин. Достаточно одного горизонтального участка, одного участка набора высоты и одного участка снижения, но их число может быть увеличено.
Для повышения точности учета влияния высоты диапазон высот ЛА от 0 до максимально возможной высоты HMAX разбивают на несколько поддиапазонов (например, три): Н1±ΔН1 м; H2±ΔH2; м, H3±ΔH3 (H1, H2 и H3 - средние значения высот поддиапазонов) и испытания проводят в каждом из поддиапазонов. Набор и снижение осуществляют относительно средней высоты поддиапазона.
При выполнении указанных режимов с некоторым периодом синхронно измеряют вертикальное ускорение Ау, приборную барометрическую высоту НПРИБ, геометрическую высоту НГ и эталонную вертикальную скорость Vyэт. Период измерений должен быть согласован с длительностью вычислительного цикла при цифровой реализации баро-инерциального фильтра (быть равным параметру τ, используемому в приведенных далее уравнениях 16...20).
3. По измеренным значениям с использованием зависимостей, полученных при зондировании атмосферы, вычисляют оптимальный набор коэффициентов, выполняя математическое моделирование баро-инерциального фильтра в каждом из упомянутых поддиапазонов высот.
Для этого формируют массивы измерений зарегистрированных сигналов вертикального ускорения Ау, приборной барометрической высоты НПРИБ геометрической высоты НГ и эталонной вертикальной скорости Vyэт с использованием НГ по зависимостям ТН=FH(НГ) и рН=Fp(HГ), полученным при зондировании атмосферы, вычисляют значения температуры и давления воздуха, по давлению воздуха рН вычисляют значения эталонной барометрической высоты НБ эт, затем вычисляют массивы модельных значений вертикальной скорости и барометрической высоты  ,
,  , а также значение минимизируемой функции, определяемой в соответствии с выбранным критерием качества. Выполняя приведенную далее процедуру оптимизации вектора коэффициентов усиления, вычисляют значения оптимального вектора
, а также значение минимизируемой функции, определяемой в соответствии с выбранным критерием качества. Выполняя приведенную далее процедуру оптимизации вектора коэффициентов усиления, вычисляют значения оптимального вектора  для каждого поддиапазона высот.
для каждого поддиапазона высот.
Вычисление упомянутых коэффициентов выполняют с помощью известной теории фильтра Калмана (Аоки М. Оптимизация стохастических систем. - М.: Наука, 1971, с.221-222), решая четыре дифференциальных уравнения для описания физических параметров, лежащих в основе работы схемы фиг.2 (соответствующих компонентам вектора состояния  ) и одного уравнения измерения барометрической высоты.
) и одного уравнения измерения барометрической высоты.
Упомянутыми компонентами вектора состояния  являются:
являются:
- барометрическая высота (НБ);
- вертикальная скорость (Vy);
- постоянная (или медленно изменяющаяся) систематическая погрешность измерения вертикального ускорения (ΔАу);
- барометрическая высота с запаздыванием в пневмотракте статического давления (НЗАП).
Дифференциальные уравнения для описания компонент вектора состояния (уравнения состояния) имеют вид:

где Ay - измеряемое вертикальное ускорение (входной параметр фильтра),
ξAy - случайная погрешность измерения вертикального ускорения,
λН - коэффициент запаздывания в пневмотракте измерения статического давления, вычисляемый по формуле (1).
Уравнение (5) представляет собой математическое описание приведенного на фиг.2 апериодического звена 6.
Уравнение измерения барометрической высоты имеет вид:

где НПРИБ - измеренная приборная барометрическая высота (входной параметр фильтра), ξН - случайная погрешность измерения барометрической высоты.
Уравнениям (2)...(5) соответствуют следующие дискретно-разностные уравнения, связывающие значения упомянутых компонент вектора состояния  в моменты времени tK и tK+1 на интервале времени τ=tK+1-tK:
в моменты времени tK и tK+1 на интервале времени τ=tK+1-tK:
где  вычисляют по формуле (1) при значениях рН и ТН, соответствующих моменту времени tК.
вычисляют по формуле (1) при значениях рН и ТН, соответствующих моменту времени tК.
Дискретный аналог уравнения измерения барометрической высоты (6) имеет вид:

Для использования фильтра Калмана, уравнения (7)...(11) представляют в следующей векторно-матричной форме:


где введены следующие обозначения:
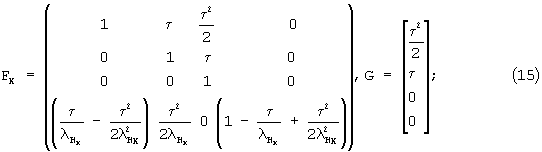
Н=[0 0 0 1] - матрица измерения размерности 1×4.
С учетом (12) и (13) форма фильтра Калмана с установившимся (постоянным) вектором коэффициентов усиления  , оценивающего параметры HБ, Vy, ΔAy, HЗАП выражается в виде алгоритма (см., например, Аоки М. Оптимизация стохастических систем. - М.: Наука, 1971, с.221-222), включающего следующие четыре этапа:
, оценивающего параметры HБ, Vy, ΔAy, HЗАП выражается в виде алгоритма (см., например, Аоки М. Оптимизация стохастических систем. - М.: Наука, 1971, с.221-222), включающего следующие четыре этапа:
1) формирование начального значения вектора состояния  (на нулевой вычислительной итерации, соответствующей k=0):
(на нулевой вычислительной итерации, соответствующей k=0):

2) вычисление прогноза оценки вектора состояния  на момент времени tK+1 по значению оценки вектора состояния
на момент времени tK+1 по значению оценки вектора состояния  в момент времени tK,
в момент времени tK,

3) вычисление сигнала рассогласования (νk+1),

4) фильтрация,

Установившийся вектор коэффициентов усиления  (включающий четыре компоненты К1, К2, К3 и К4, обозначения которых соответствуют схеме на фиг.2) вычисляют априорно (до реализации фильтра) на основе следующей последовательности итерационных уравнений:
(включающий четыре компоненты К1, К2, К3 и К4, обозначения которых соответствуют схеме на фиг.2) вычисляют априорно (до реализации фильтра) на основе следующей последовательности итерационных уравнений:

где VK+1,K и VK+1 - априорная и апостериорная ковариационные матрицы ошибок оценки вектора состояния соответственно (размерность матриц 4×4), являющиеся промежуточными переменными величинами, необходимыми для вычисления вектора  К,
К,
FК Т - транспонированная матрица (по отношению к матрице FK),
Q - ковариационная матрица (размерности 4х4) вектора случайных погрешностей  , используемого в уравнении (11), определяемая в виде:
, используемого в уравнении (11), определяемая в виде:

I - единичная матрица размерности 4×4,
К=0, 1, 2 ... - подстрочный индекс, обозначающий номера вычислительных итераций.
Для инициализации вычислений вектора коэффициентов усиления по уравнениям (20) необходимо задать начальное значение ковариационной матрицы V0, которую определяют в следующем диагональном виде:
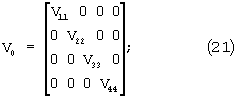
где V11, V22, V33 и V44 - начальные (априорные) значения дисперсий оценки компонент вектора состояния  , которые задают в виде произвольных положительных чисел.
, которые задают в виде произвольных положительных чисел.
Обычно в соответствии с теорией фильтра Калмана предполагают, что случайные погрешности измерения вертикального ускорения ξAy, барометрической высоты ξH в уравнениях состояния (12) и измерения (13) представляют собой стационарные случайные процессы с дисперсиями σAy и σH соответственно. При выполнении условий σAy=const, σH=const,  матрицы FK, Q и Н являются постоянными, процесс вычисления вектора коэффициентов усиления
матрицы FK, Q и Н являются постоянными, процесс вычисления вектора коэффициентов усиления  по уравнениям (20) при увеличении номера итерации К сходится к постоянному вектору
по уравнениям (20) при увеличении номера итерации К сходится к постоянному вектору  (см. Брайсон, Хо Ю-Ши, - М.: Мир, 1972, с.416), причем значение постоянного вектора K не зависит от начального значения ковариационной матрицы ошибок V0, определяемой по (21), а установившийся вектор коэффициентов усиления фактически однозначно определяется тремя параметрами, используемыми в уравнениях (20), а именно параметрами - σAy, σH и λH, т.е. его можно представить в виде следующего векторного оператора:
(см. Брайсон, Хо Ю-Ши, - М.: Мир, 1972, с.416), причем значение постоянного вектора K не зависит от начального значения ковариационной матрицы ошибок V0, определяемой по (21), а установившийся вектор коэффициентов усиления фактически однозначно определяется тремя параметрами, используемыми в уравнениях (20), а именно параметрами - σAy, σH и λH, т.е. его можно представить в виде следующего векторного оператора:

Как следует из теории, фильтр Калмана, определяемый уравнениями (16)...(19) с установившимся вектором коэффициентов усиления , вычисляемым с помощью векторного оператора (22), обеспечивает оптимальность оценки вектора состояния (т.е. минимизацию среднеквадратической погрешности) только при условиях, когда погрешности входных сигналов ξAy и ξH представляют собой стационарные случайные процессы с известными статистическими характеристиками (дисперсиями σAy и σH). Анализ натурных данных, полученных в летных испытаниях ЛА, показал, что эти условия не выполняются в следующих отношениях:
- во входном сигнале приборной барометрической высоты НПРИБ на режимах полета ЛА с изменением вертикальной скорости, углов атаки и скольжения имеются низкочастотные погрешности, носящие квазидетерминированный (неслучайный) характер. К таким погрешностям относятся, например, пульсации параметра НПРИБ на резонансных частотах пневмотракта в наборах высоты и снижениях ЛА, а также нестационарные аэродинамические погрешности измерения НПРИБ которые проявляются при быстром темпе изменения углов атаки и скольжения ЛА (особенно на ЛА с бортовыми ПВД). Отмеченные погрешности измерения сигнала НПРИБ увеличивается при увеличении высоты. В силу упомянутых причин параметр σН имеет неопределенный смысл, ввиду того, что понятие дисперсии для неслучайных процессов не имеет смысла,
- случайная (высокочастотная) погрешность измерения вертикального ускорения (ξAy) ЛА определяется в основном вибрациями в месте установки акселерометров, зависящими от многих факторов, включающих режим работы двигателя, жесткости подвесок акселерометров, аэро-упругих характеристик фюзеляжа (зависящих в том числе и от плотности воздуха, а следовательно, и от высоты полета ЛА). Ввиду большого количества факторов, влияющих на случайную погрешность ξAy, оценка ее дисперсии σAy в зависимости от текущих параметров полета ЛА не представляется возможной. По этим причинам метод вычисления вектора коэффициентов на основе статистических характеристик входных сигналов, основанный на классических положениях теории фильтра Калмана, является неприемлемым при необходимости точного измерения параметров.
Вот поэтому предлагается определение коэффициентов К1, К2, К3, К4, основанное на математическом моделировании баро-инерциального фильтра с использованием реальных значений параметров, зарегистрированных в процессе летных испытаний ЛА при различных установившихся векторах коэффициентов усиления  При этом принимают во внимание следующее обстоятельство. В соответствии с определением вектора оператором (22), погрешности входных сигналов (дисперсий σAy и σH) и коэффициент запаздывания λH, должны быть постоянными. Это накладывает определенные требования на характер выполняемых режимов. Ввиду того, что одним из основных факторов (кроме факторов, связанных с характеристиками конкретного ЛА), от которых зависят погрешности входных сигналов НПРИБ и Ay (а, следовательно, и оптимальный вектор коэффициентов усиления ), является (как отмечено выше) высота полета ЛА, условие постоянства погрешностей входных сигналов и коэффициента запаздывания λH, обеспечивают выполнением режимов с небольшим перепадом высот. По указанной причине летные испытания лучше выполнять в нескольких поддиапазонах высот и в каждом поддиапазоне выполнять процедуру оптимизации вектора , состоящую в следующем.
При этом принимают во внимание следующее обстоятельство. В соответствии с определением вектора оператором (22), погрешности входных сигналов (дисперсий σAy и σH) и коэффициент запаздывания λH, должны быть постоянными. Это накладывает определенные требования на характер выполняемых режимов. Ввиду того, что одним из основных факторов (кроме факторов, связанных с характеристиками конкретного ЛА), от которых зависят погрешности входных сигналов НПРИБ и Ay (а, следовательно, и оптимальный вектор коэффициентов усиления ), является (как отмечено выше) высота полета ЛА, условие постоянства погрешностей входных сигналов и коэффициента запаздывания λH, обеспечивают выполнением режимов с небольшим перепадом высот. По указанной причине летные испытания лучше выполнять в нескольких поддиапазонах высот и в каждом поддиапазоне выполнять процедуру оптимизации вектора , состоящую в следующем.
Ввиду того, что входящие в оператор (22) дисперсии σAy и σH не могут быть определены (в силу упомянутых выше причин), их заменяют на неизвестные переменные Х и У, принимающие независимые положительные значения в диапазонах, которые выбирают так, чтобы максимальные границы этих диапазонов в несколько раз превышали ожидаемые максимальные погрешности в параметрах Ау и НПРИБ соответственно. Значения переменных Х и Y в упомянутых диапазонах задают на дискретном множестве. Например, таким множеством может быть следующее множество значений переменных Х и Y:

I, J - размерности массивов.
Моделирование фильтра в каждом поддиапазоне высот выполняют при различных векторах коэффициентов усиления  , заданных на дискретном множестве значений переменных Х и Y (23), т.е.:
, заданных на дискретном множестве значений переменных Х и Y (23), т.е.:

где  - коэффициент запаздывания, вычисленный по формуле (1) при температуре и давлении воздуха на средней высоте поддиапазона.
- коэффициент запаздывания, вычисленный по формуле (1) при температуре и давлении воздуха на средней высоте поддиапазона.
Переменные Х и Y не имеют смысла дисперсий входных сигналов σAy и σH, вместо которых они введены. Они являются неизвестными "управляющими" параметрами, за счет выбора которых обеспечивают вычисление оптимального вектора в соответствии с заданным критерием качества. При этом критерий качества оптимизации определяют не статистическими характеристиками входных сигналов, а степенью приближения выходных модельных значений вертикальной скорости или барометрической высоты, полученных при математическом моделировании, к их эталонным значениям, которые формируют при летных испытаниях ЛА. В качестве значений эталонной вертикальной скорости Vyэт могут, например, быть использованы значения вертикальной скорости, измеренные СНС или наземными станциями ВТИ. Значения эталонной барометрической высоты НБ ЭТ вычисляют по значениям давления наружного воздуха, полученным предварительным зондированием атмосферы.
Для каждого вектора коэффициентов усиления из набора (24), при одних и тех же массивах входных параметров НПРИБ и Ay для одного поддиапазона высот, по уравнениям (16)...(19) вычисляют массивы модельных значений вертикальной скорости и барометрической высоты  , а также значение минимизируемой функции, определяемой в соответствии с выбранным критерием качества. Этот критерий может быть задан минимизацией, например, одной из следующих представляющих практический интерес функций, характеризующих отклонение модельных и эталонных значений:
, а также значение минимизируемой функции, определяемой в соответствии с выбранным критерием качества. Этот критерий может быть задан минимизацией, например, одной из следующих представляющих практический интерес функций, характеризующих отклонение модельных и эталонных значений:
а) среднее значение квадрата погрешности измерения вертикальной скорости:

где  , i=1...N - массив модельных значений вертикальной скорости, зависящей (при заданных входных сигналах НПРИБ и Ay) от вектора коэффициентов усиления
, i=1...N - массив модельных значений вертикальной скорости, зависящей (при заданных входных сигналах НПРИБ и Ay) от вектора коэффициентов усиления  и коэффициента запаздывания λH,
и коэффициента запаздывания λH,
Vyi эт, i=1...N - массив эталонных значений вертикальной скорости,
N - длина массива измерений.
б) максимальное значение модуля погрешности измерения вертикальной скорости:

где m и k - номера массивов измерений, соответствующих началу и концу участка полета, на котором оценивают погрешность измерения,
в) среднее значение квадрата погрешности измерения барометрической высоты:

где  , i=1...N - массив модельных значений барометрической высоты,
, i=1...N - массив модельных значений барометрической высоты,
НБi эт i=1...N - массив эталонных значений барометрической высоты,
N - длина массива измерений.
г) максимальное значение модуля погрешности измерения барометрической высоты

В качестве оптимального вектора коэффициентов усиления в одном поддиапазоне высот используют один вектор из набора (24), соответствующий минимальному значению выбранной минимизируемой функции.
Когда найдены таким образом наборы оптимальных коэффициентов для нескольких поддиапазонов высот, в качестве результирующего оптимального вектора коэффициентов усиления принимают вектор , каждую из четырех компонент которого аппроксимируют полиномом по значениям этой компоненты в каждом поддиапазоне высот (при этом оптимальное значение каждой компоненты в поддиапазоне относят к средней высоте поддиапазона).
4. Далее в процессе полетов ЛА с реализованным баро-инерциальным фильтром, используя полученный по результатам летных испытаний оптимальный вектор коэффициентов усиления (с компонентами К1, К2, К3, К4), измеряют вертикальное ускорение Ау и с помощью датчика статического давления приборную барометрическую высоту НПРИБ значения вертикальной скорости  получают путем интегрирования разности вертикального ускорения Ау и поправки ускорения, значения барометрической высоты
получают путем интегрирования разности вертикального ускорения Ау и поправки ускорения, значения барометрической высоты  получают путем интегрирования разности вертикальной скорости и поправки скорости. Поправки ускорения и скорости находят, используя разность между значением барометрической высоты с учетом поправки на запаздывание в пневмотракте статического давления и значением приборной барометрической высоты, определенной с помощью датчика статического давления. Значение барометрической высоты с учетом поправки на запаздывание в пневмотракте находят путем вычисления разности между полученным путем интегрирования, как упомянуто, значением барометрической высоты и поправкой высоты, и последующего учета запаздывания, причем коэффициент запаздывания в пневмотракте измерения статического давления λН определяют по формуле (1). В качестве поправки высоты принимают умноженную на коэффициент К4 упомянутую разность высот. Поправку ускорения находят как сумму умноженной на коэффициент К2 упомянутой разности высот и умноженного на коэффициент К3 результата интегрирования той же упомянутой разности высот, в качестве упомянутой поправки скорости принимают умноженную на коэффициент K1 ту же упомянутую разность высот.
получают путем интегрирования разности вертикальной скорости и поправки скорости. Поправки ускорения и скорости находят, используя разность между значением барометрической высоты с учетом поправки на запаздывание в пневмотракте статического давления и значением приборной барометрической высоты, определенной с помощью датчика статического давления. Значение барометрической высоты с учетом поправки на запаздывание в пневмотракте находят путем вычисления разности между полученным путем интегрирования, как упомянуто, значением барометрической высоты и поправкой высоты, и последующего учета запаздывания, причем коэффициент запаздывания в пневмотракте измерения статического давления λН определяют по формуле (1). В качестве поправки высоты принимают умноженную на коэффициент К4 упомянутую разность высот. Поправку ускорения находят как сумму умноженной на коэффициент К2 упомянутой разности высот и умноженного на коэффициент К3 результата интегрирования той же упомянутой разности высот, в качестве упомянутой поправки скорости принимают умноженную на коэффициент K1 ту же упомянутую разность высот.
Такой способ измерения вертикальной скорости и барометрической высоты позволяет получить их значения более точно.
Пример. Фиг.3 иллюстрирует процедуру оптимизации вектора коэффициентов усиления в соответствии с предлагаемым способом по критерию минимизации среднего значения квадрата погрешности измерения вертикальной скорости (т.е. минимизации функции (25)) в одном поддиапазоне высот. На чертеже приведены три графика погрешностей измерения вертикальной скорости (разностей  ) по времени, полученные при трех произвольных векторах коэффициентов усиления (с условными номерами 1, 2 и 3), выбранных из полного набора (24). Компоненты упомянутых трех векторов и соответствующие значения минимизируемой функции F1 приведены в таблице.
) по времени, полученные при трех произвольных векторах коэффициентов усиления (с условными номерами 1, 2 и 3), выбранных из полного набора (24). Компоненты упомянутых трех векторов и соответствующие значения минимизируемой функции F1 приведены в таблице.
Как следует из приведенных фиг.3 и таблицы, при уменьшении значения минимизируемой функции F1 от 1.05 м2/с2 (при векторе коэффициентов усиления №1) до 0.23 м2/с2 (при векторе коэффициентов усиления №3) значение максимальной погрешности измерения вертикальной скорости уменьшается от 3.3 м/с до 0.7 м/с, что свидетельствует об эффективности процедуры оптимизации вектора коэффициентов усиления предлагаемым способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ БАРОМЕТРИЧЕСКОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2258229C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗАПАЗДЫВАНИЯ В ПНЕВМОТРАКТЕ СТАТИЧЕСКОГО ДАВЛЕНИЯ СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ В ЛЕТНЫХ ИСПЫТАНИЯХ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241641C1 |
| Способ определения барометрической высоты летательного аппарата в полете с использованием бортовых спутниковых навигационных приемников и авиационных метеорологических прогнозов | 2024 |
|
RU2824733C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ В ЛЕТНЫХ ИСПЫТАНИЯХ ЛЕТАТЕЛЬНОГО АППАРАТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2396569C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ ЮСТИРОВКИ ПРИЦЕЛА ЛЕТАТЕЛЬНОГО АППАРАТА В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2000 |
|
RU2187776C2 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |


Изобретение относится к авиационной технике. Измеряют вертикальное ускорение и датчиком статического давления - приборную барометрическую высоту, значения вертикальной скорости получают путем интегрирования вертикального ускорения, значения барометрической высоты - интегрированием вертикальной скорости с учетом поправок ускорения и скорости, разность между вычисленной и приборной барометрическими высотами с учетом запаздывания в пневмотракте статического давления используют для вычисления упомянутых поправок с использованием коэффициентов. Летные испытания, не более чем за 3 часа до начала которых зондируют атмосферу, выполняют на режимах, состоящих из участков горизонтального полета, наборов высоты и снижений, при этом синхронно измеряют вертикальное ускорение, приборную барометрическую высоту, эталонную вертикальную скорость и геометрическую высоту летательного аппарата, с использованием этих параметров на основе фильтра Калмана вычисляют модельные значения вертикальной скорости и барометрической высоты и оптимизируют коэффициенты, минимизируя критерий качества: среднее значение квадрата погрешности либо максимальное значение модуля погрешности определяемой величины. Запаздывание в пневмотракте определяют с учетом давления и температуры воздуха на текущей высоте. Техническим результатом является повышение точности определения вертикальной скорости и барометрической высоты полета. 6 з.п. ф-лы, 3 ил., 1 табл.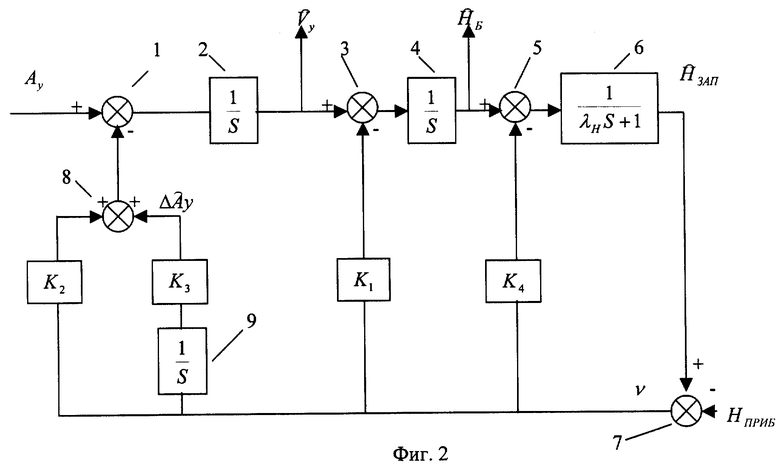

где рн и Тн - давление и температура воздуха на текущей высоте полета;
λ0 - коэффициент запаздывания на уровне земли;
Т0=288,15°К;
p0=760 мм рт. ст.
| US 4882697 А, 21.11.1989 | |||
| ИЗМЕРИТЕЛЬ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1987 |
|
SU1559894A1 |
| СИСТЕМА КОРРЕКЦИИ ВЫХОДНОЙ ИНФОРМАЦИИ АВИАЦИОННЫХ ВЫСОТОМЕРОВ | 1980 |
|
SU946336A1 |
| СПОСОБ КОНТРОЛЯ ИЗМЕРИТЕЛЯ АЭРОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2079142C1 |
| WO 00/70354 A1, 23.11.2000 | |||
| US 4008618 А, 22.02.1977 | |||
| US 3005348 А, 24.10.1961. | |||

