Предлагаемый способ относится к области машиностроения, роботостроения и может использоваться в пневматическом и гидравлическом оборудовании.
Наиболее эффективно применение способа для работы приводов криволинейного перемещения подвижных звеньев промышленных роботов.
Известен способ работы сильфонных приводов криволинейного перемещения (см. пат. РФ МПК F25J 15/06 №147155 «Захватный корректирующий модуль», Сысоев С.Н., Литвинов И.С, Юнцзе Цао, опубл. 27.10.2014 г., Бюл. №30; пат. РФ МПК F25J 15/06 №2 622 071 «Захватный корректирующий модуль», Сысоев С.Н., Литвинов И.С, Мольков А.А, опубл. 09.06.2017 г., Бюл. №16), имеющих рабочую герметичную камеру, образованную сильфоном и торцевыми заглушками, соединенными между собой с возможностью ограничения осевой длины камеры. В качестве ограничителя осевой длины камеры применяется рычажный передаточный механизм, соединенный с заглушками. В исходном положении сильфон занимает симметричное относительно его оси положение. Внешним силовым воздействием осуществляют предварительное искривление камеры сильфона, задавая требуемое радиальное направление перемещения. Затем создают давление разрежения пневмопитания в камере, приводящее к реализации криволинейного перемещения.
Данный способ работы сильфонных приводов не позволяет изменять и управлять траекторией криволинейного перемещения, что ограничивает его функциональные возможности. Кроме этого, применение рычажного ограничителя осевой длины камеры снижает надежность работы привода, а использование в качестве энергоносителя давления разрежения воздуха, ограничивает его силовые характеристики.
Известен способ работы сильфонного привода криволинейного перемещения (см. пат. РФ МПК F25J 15/06 №2722200 «Привод криволинейного перемещения», Сысоев С.Н., Овчинников В.А., Голубева Т.Н., опубл. 28.05.2019 г., Бюл. №16), включающие поворотный механизм, состоящий из кольцевого сильфона, по оси которого на торцах закреплены две заглушки, образующие герметичную полость, выполненную с возможностью соединения со средством давления, а в полости на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга. В исходном положении полость соединена через распределитель с атмосферой. Сильфон за счет упругости гофр занимает симметричное относительно оси положение. Заглушки располагаются параллельно друг другу. Внешним силовым воздействием, перекосом одной заглушки относительно другой предварительно задают направление криволинейного перемещения. Для осуществления движения приводом криволинейного перемещения создают в полости сильфона давление рабочей среды. Силовое воздействие от избыточного давления приводит к криволинейному перемещению рабочего органа.
Данный способ повышает эффективность работы привода путем увеличения силовых характеристик при сохранении его массогабаритных параметров, однако не позволяет управлять траекторией криволинейного перемещения.
Наиболее близким по технической сущности является способ работы сильфонных приводов криволинейного перемещения (см. пат. РФ МПК F15В 15/10 №2736902 «Привод криволинейного перемещения», Сысоев С.Н., Никифоров И.Е., Мосалев А.А., опубл. 23.11.2020 г., Бюл. №33), состоящий из кольцевого сильфона, по оси которого на торцах закреплены две заглушки, образующие герметичную полость, выполненную с возможностью соединения со средством давления, по оси сильфона на заглушках закреплен ограничитель осевой длины камеры, выполненный в виде гибкой подпружиненной тяги, а на заглушках по периметру закреплен ограничитель их взаимного осевого перемещения, выполненный в виде гибкой нерастяжимой оболочки. В исходном положении сильфон за счет упругости гофр занимает симметричное относительно оси положение.
Для осуществления движения приводом криволинейного перемещения в камере сильфона повышают давление рабочей среды. Силовое воздействие от избыточного давления приводит к искривлению камеры. Дальнейшее повышение величины давления в камере приводит к увеличению осевой длины камеры и выпрямлению сильфона.
Данный способ расширяет функциональные возможности приводов, но он не позволяет управлять траекторией в процессе их функционирования.
Таким образом, в данном способе и всех известных, отсутствует возможность управления траекторией криволинейного перемещения.
Задачей изобретения является расширение функциональных возможностей за счет обеспечения управления траекторией криволинейного перемещения.
Поставленная задача достигается тем, что в способе работы сильфонного привода криволинейного перемещения, включающим создание питания рабочей среды в камере, образованной сильфоном и торцевыми заглушками, соединенными между собой с возможностью ограничения осевой длины камеры, регулируют давление в рабочей камере сильфона и изменяют величину ограничения осевой длины рабочей камеры сильфона за счет уменьшения длины тяги, расположенной в полости рабочей камеры сильфона, для управления траекторией криволинейного перемещения сильфона.
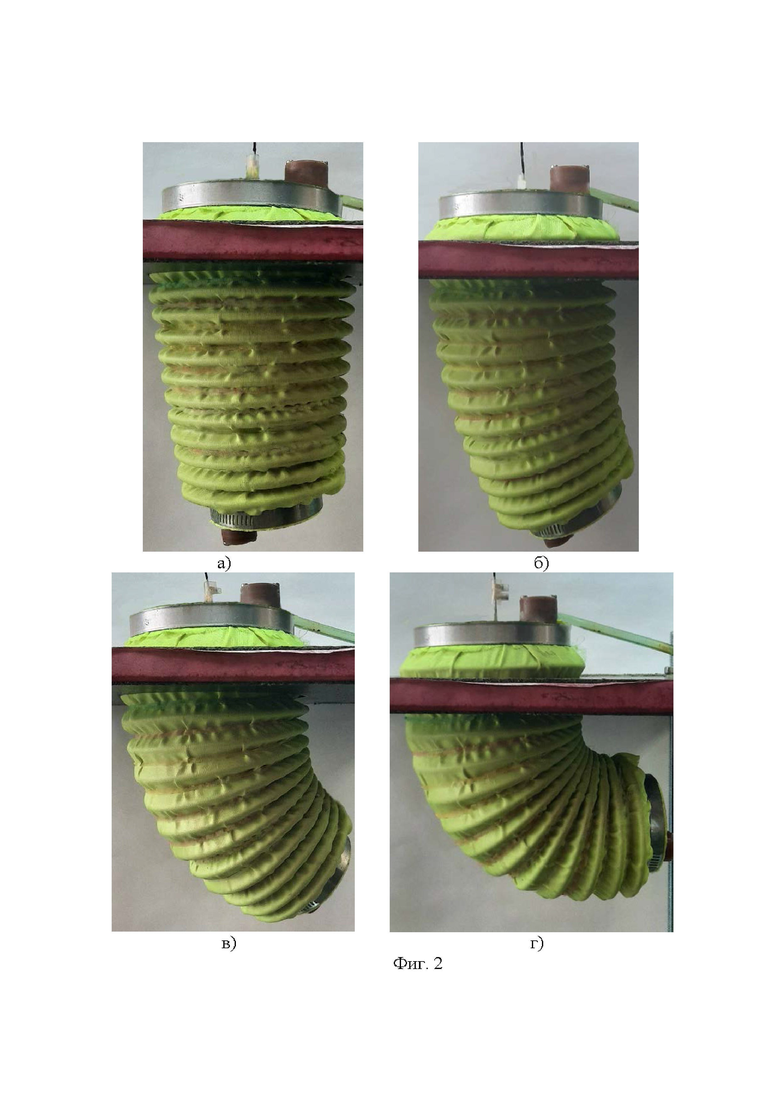
Пример реализации предлагаемого способа представлен на чертежах, где показаны этапы работы сильфонного привода криволинейного перемещения (фиг. 1) и виды общие разнообразных положений механизма (фиг. 2) при постоянном давлении питания в камере сильфона.
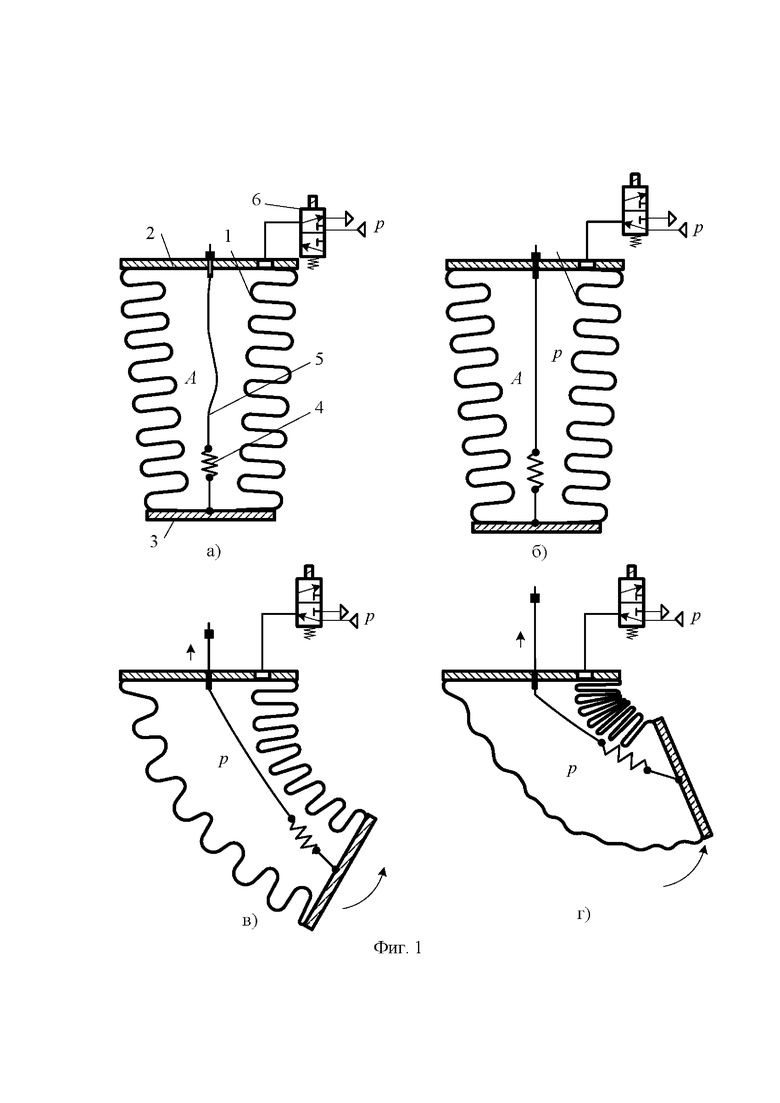
В сильфонном приводе криволинейного перемещения (фиг. 1, а) рабочая камера А образована сильфоном 1 и торцевыми заглушками 2, 3. Заглушки соединены между собой подпружиненной пружиной 4 тягой 5, выполненной с возможностью изменения ограничения осевой величины расстояния между заглушками. Полость А выполнена с возможностью соединения распределителем 6 с давлением питания рабочей среды.
Способ работы устройства заключается в следующем.
В исходном положении (фиг. 1, а) полость А соединена через распределитель 6 с атмосферой. Тяга 5 не оказывает силового воздействия на камеру сильфона. За счет упругости гофр он занимает симметричное относительно оси положение. Заглушки располагаются параллельно друг другу.
В камере А переключением распределителя 6 создают давление, например, р (фиг. 1, б). Осевое расстояние камеры увеличивается, тяга 5 воздействует на заглушки 2 и 3, ограничивая его осевое удлинение. Сильфон продолжает занимать симметричное положение, но приобретает неустойчивость.
Для осуществления криволинейного перемещения уменьшают длину тяги 5, увеличивая величину ограничения осевого размера камеры. Внешним силовым воздействием задают радиальное направление криволинейного перемещения. Сильфон осуществляет криволинейное перемещение, например, против часовой стрелки и принимает положение, показанное на фиг. 1, в.
Уменьшение длины тяги, расположенной в полости А, приводит к дальнейшему искривлению сильфона (фиг. 1, г).
Изменение величины ограничения осевой длины камеры сильфона позволяет управлять траекторией криволинейного перемещения.
Дополнительное регулирование давления в камере расширяет возможности управления и существенно увеличивает возможности получения разнообразных траекторий криволинейного перемещения.
Кроме этого, предлагаемый способ работы открывает возможность создавать и использовать качественно новый тип устройств - безнасосные сильфонные приводы криволинейного перемещения.
Таким образом, предлагаемое техническое решение расширяет функциональные возможности сильфонных приводов за счет управления траекторией криволинейного перемещения.
Макетирование, проведенные натурные исследования предлагаемого способа подтвердили его работоспособность, эффективность и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сильфонный привод криволинейного перемещения | 2022 |
|
RU2785181C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2736902C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749544C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722200C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722916C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749545C1 |
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2657672C1 |
| Катапульта для взлета летательного аппарата | 2022 |
|
RU2789905C1 |
| Стартовое устройство | 2022 |
|
RU2787533C1 |
Изобретение относится к области машиностроения, роботостроения и может использоваться в пневматическом и гидравлическом оборудовании. Наиболее эффективно применение изобретения для работы приводов криволинейного перемещения подвижных звеньев промышленных роботов. Предложен способ работы сильфонного привода криволинейного перемещения, включающий создание питания рабочей среды в камере (А), образованной сильфоном (1) и торцевыми заглушками (2, 3), соединенными между собой с возможностью ограничения осевой длины камеры, при этом регулируют давление в рабочей камере (А) сильфона (1) и изменяют величину ограничения осевой длины рабочей камеры (А) сильфона (1) за счет уменьшения длины тяги (5), расположенной в полости рабочей камеры сильфона, для управления траекторией криволинейного перемещения сильфона. Предлагаемое техническое решение расширяет функциональные возможности сильфонных приводов за счет управления траекторией криволинейного перемещения. 2 ил.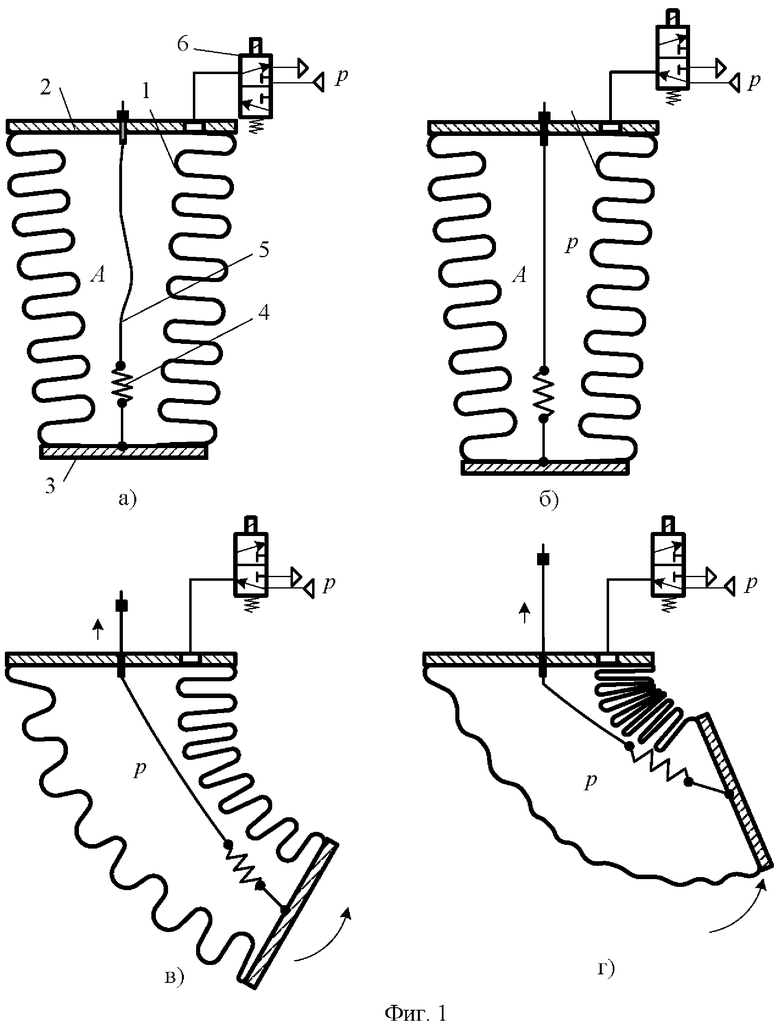
Способ работы сильфонного привода криволинейного перемещения, включающий создание питания рабочей среды в камере, образованной сильфоном и торцевыми заглушками, соединенными между собой с возможностью ограничения осевой длины камеры, отличающийся тем, что регулируют давление в рабочей камере сильфона и изменяют величину ограничения осевой длины рабочей камеры сильфона за счет уменьшения длины тяги, расположенной в полости рабочей камеры сильфона, для управления траекторией криволинейного перемещения сильфона.
| Привод криволинейного перемещения | 2019 |
|
RU2722200C1 |
| US 5203380 A1, 20.04.1993 | |||
| DE 7539770 U1, 15.07.1976 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ ТАБАЧНЫХ ПРОДУКТОВ | 2016 |
|
RU2713492C2 |
| US 4195529 A1, 01.04.1980 | |||
| Пусковой реостат для трехфазных асинхронных двигателей | 1929 |
|
SU23476A1 |

