Предлагаемое устройство относится к области машиностроения, роботостроения и может использоваться при выполнении сборочных операций для устранения рассогласования взаимного расположения сопрягаемых осесимметричных изделий. Наиболее эффективно применение устройства для коррекции положения плоских крышек (изделий типа «втулка») при их установке на поверхность изделия типа вал с использованием вакуумных или электромагнитных захватов.
Известны устройства, применяемые для компенсации рассогласований взаимного положения изделий, возникающих при их сопряжении. Применяют устройства, работу которых подразделяют на процессы с активной, пассивной и комбинированной адаптацией (см. Сысоев С.Н. Исследование граничных условий применения метода многократной коррекции положения сопрягаемых изделий / С.Н. Сысоев, Е.В. Еропова // Сборка в машиностроении, приборостроении. - 2011. - №7. - С. 3-7, Сысоев С.Н. Устройства коррекции положения сопрягаемых изделий / С.Н. Сысоев // Прогрессивные технологии в машиностроении [Текст]: сборник научных трудов, посвященный 40-летию кафедры технологии машиностроения. -Ковров: ФГБОУ «КГТА им. В.А. Дегтярева», 2013, - с.71-80).
Наиболее простыми по конструкции и управлению являются устройства с пассивной и комбинированной адаптацией сборки. Однако устройства с пассивной адаптацией отличаются низкой производительностью и функциональной ненадежностью, так как используют вероятностные методы сопряжения изделий. Наиболее эффективными являются устройства с комбинированной адаптацией, где используются причинные взаимосвязи между физическими явлениями, происходящими в технологическом процессе. К ним относятся рычажные корректирующие устройства.
Известно устройство (см. пат. РФ МПК B25J 16/06 №115711 «Захватный корректирующий модуль», Сысоев С.Н., Еропова Е.В., Коробова Т.Н., заявл. 08.11.2011 г., опубл. 10.05.2012 г., Бюл. №13), содержащее корпус с приводом линейного перемещения захвата, закрепленного на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения. Между захватом и подвижным рабочим органом последовательно установлены два рычага, закрепленные с возможностью перекоса и подпружиненные относительно среднего положения, причем длина рычага, закрепленного на подвижном рабочем органе, больше длины рычага, соединенного с захватом. Манипулируют изделием типа «вал», устанавливая его в отверстие втулки. При исходном рассогласовании положений осей вала и втулки в процессе их сопряжения возникает перекос вала, направленный в сторону требуемой коррекции его положения.
Устройство позволяет, используя перекос вала при силовом взаимодействии с втулкой, выполнить требуемое сопряжение изделий.
Однако применение силового взаимодействия между изделиями для организации процесса их относительного перемещения может привести к заклиниванию сопрягаемых изделий и невозможности сборки. Кроме этого устройство имеет незначительную величину допустимого исходного смещения сопрягаемых изделий, что ограничивает область его применения в автоматизированных производствах.
Известно устройство (см. пат. РФ МПК B25J 16/06, №128150, «Захватный корректирующий модуль», Сысоев С.Н., Столяров А.В., заявл. 20.05.2012 г., опубл. 20.05.2013 г., Бюл. №14), содержащее корпус с приводом линейного перемещения захвата, закрепленного на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения, а между захватом и подвижным рабочим органом установлен рычажный механизм коррекции. Рычажный механизм коррекции выполнен в виде стержня, один конец которого закреплен на подвижном рабочем органе с возможностью перекоса и подпружинен относительно среднего положения, а другой соединен с захватом и подпружинен относительно среднего положения.
Устройство имеет более простое конструктивное выполнение. Оно позволяет, используя перекос вала при силовом взаимодействии с втулкой, за счет перекоса рычага, выполнить требуемое сопряжение изделий.
Однако при использовании данного устройства также возможно заклинивание изделий в процессе коррекции, а величина допустимого исходного смещения сопрягаемых изделий незначительна, что ограничивает область его применения.
Наиболее близким по технической сущности из известных является устройство (см. пат. РФ МПК B25J 16/06, №147155, «Захватный корректирующий модуль», Сысоев С.Н., Литвинов И.С., Юнцзе Цао, заявл. 25.03.2014 г., опубл. 27.10.2014 г., Бюл. №30), содержащее корпус с приводом линейного перемещения захвата, закрепленного на подвижном рабочем органе привода с возможностью перекоса и подпружиненного относительно среднего положения, а между захватом и подвижным рабочим органом последовательно установлены два рычага, закрепленные с возможностью перекоса и подпружиненные относительно среднего положения. Причем длина рычага, закрепленного на подвижном рабочем органе, меньше длины рычага, соединенного с захватом.
Данное устройство позволяет, используя перекос изделия типа «втулка» при силовом взаимодействии с валом, за счет изменения взаимного расположения рычагов, выполнить требуемое сопряжение изделий.
Однако в данном устройстве, как и во всех известных, использование силового взаимодействия сопрягаемых изделий для реализации перемещения сопрягаемого изделия ограничивает эффективность их работы из-за заклинивания изделий.
Задачей изобретения является повышение эффективности работы захватного корректирующего модуля путем устранения возможности заклинивания сопрягаемых изделий и увеличения рабочей зоны.
Поставленная задача достигается тем, что в захватном корректирующем модуле, включающем рычаги, шарнирно соединенные между собой, установленные между захватом и подвижным рабочим органом, закрепленные с возможностью перекоса, в месте соединения рычагов, установлен поворотный механизм.
В захватном корректирующем модуле с целью упрощения конструкции и управления поворотный механизм может быть состоящим из герметичной оболочки, охватывающей место крепления рычагов, образующей герметичную камеру, выполненную с возможностью соединения с пневматическими линиями питания, образованную корпусом с закрепленными на нем мембранами, соединенными с рычагами.
В захватном корректирующем модуле с целью увеличения рабочего хода поворотного механизма корпус может быть выполнен в виде сильфона.
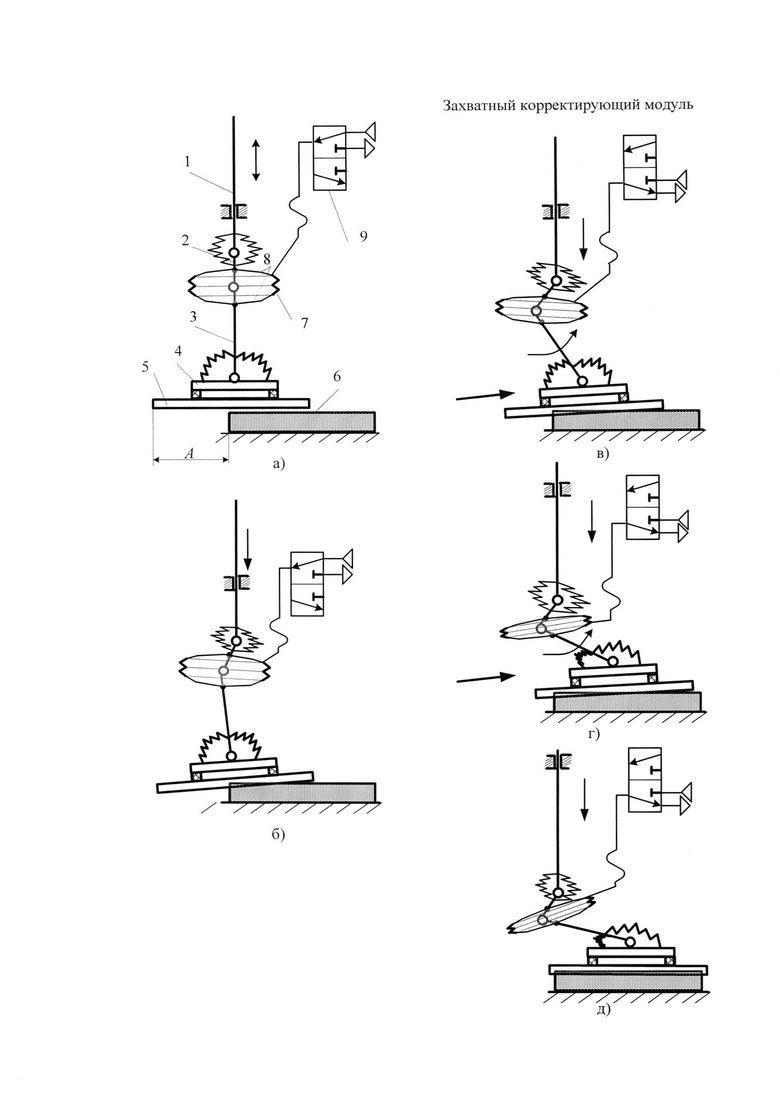
Пример реализации показан на чертеже. Устройство (фиг.) состоит из привода линейного перемещения рабочего органа 1, на котором шарнирно закреплен через рычаги 2 и 3. Рычаг 3 связан с захватом 4, удерживающим изделие 5. Изделие 5 представляет собой втулку (крышку) и устанавливается на вал 6. Захват соединен с рабочим органом через рычаги, последовательно установленные и шарнирно соединенные с возможностью перекоса и подпружинено относительно среднего положения. Причем длина рычага 3 больше длины рычага 2. В месте соединения рычагов 3 и 4 установлен поворотный механизм, состоящий из сильфона 7, на котором закреплены мембраны 8, соединенные с рычагами 2 и 3, образуя герметичную камеру. Камера выполнена с возможностью соединения через распределитель 9 с пневматическими линиями питания вакуума или избыточного давления.
На чертеже (фиг. а, б, в, г, д) показаны этапы работы устройства.
Устройство работает следующим образом. В исходном положении (фиг., а) рабочий орган 1 занимает крайнее верхнее положение. Захват удерживает изделие 5. Камера поворотного механизма соединена через распределитель 9 с избыточным давлением линии питания. Поворотный механизм выполняет функцию пружины, подпружинивая рычаги 2 и 3 в среднем положении.
По команде «установить изделие», которое смещено от требуемого положения на величину А, перемещают рабочим органом 1 крышку 5 в направлении вала 6.
Это приводит к ее касанию торцевой поверхности вала. Силовое взаимодействие сопрягаемых изделий приводит к перекосу захвата и рычагов. Причем направление перекоса захвата противоположно требуемому направлению коррекции положения изделия 5 (фиг., б). Положением рычагов задается требуемое направление коррекции. Далее переключают распределитель 9, соединяя камеру с линией разрежения (фиг., в). Возникающее силовое воздействие от давления разрежения в камере приводит к созданию крутящего момента и повороту рычагов в направлении их предварительно созданного перекоса. Крышка 5 перемещается устройством в направлении требуемой коррекции (фиг., г) при незначительном силовом взаимодействии сопрягаемых изделий.
Перемещение крышки приводит к выполнению требуемой коррекции его положения (фиг., д).
Данное техническое решение повышает эффективность работы корректирующего модуля, устраняя возможность заклинивания путем уменьшения величины силового взаимодействия сопрягаемых изделий, а также расширяет область применения устройства за счет увеличения рабочей зоны коррекции сопрягаемых изделий.
В лаборатории кафедры автоматизации технологических процессов Владимирского государственного университета имени Александра Григорьевича и Николая Григорьевича Столетовых проводились макетирование и натурные испытания предлагаемого устройства.
Испытания подтвердили повышение эффективности работы устройства и его промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватный корректирующий модуль | 2017 |
|
RU2668241C1 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| Захватный корректирующий модуль | 2016 |
|
RU2622071C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749544C1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Способ сборки деталей типа вал-втулка | 2015 |
|
RU2638089C2 |
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722916C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722200C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749545C1 |
Изобретение относится к области машиностроения, роботостроения и может использоваться при выполнении сборочных операций для устранения рассогласования взаимного расположения сопрягаемых осесимметричных изделий. Захватный корректирующий модуль содержит привод линейного перемещения подвижного рабочего органа, рычаги, шарнирно соединенные между собой, последовательно установленные между захватом и подвижным рабочим органом, закрепленные с возможностью перекоса и подпружиненные относительно среднего положения. Захватный корректирующий модуль снабжен поворотным механизмом, выполненным в виде герметичной камеры, образованной корпусом с закрепленными на нем мембранами, соединенными с рычагами, выполненной с возможностью соединения с пневматическими линиями питания и охвата места соединения рычагов. В частности, корпус поворотного механизма выполнен в виде сильфона. Изобретение обеспечивает повышение эффективности работы, устраняя возможность заклинивания путем уменьшения величины силового взаимодействия сопрягаемых изделий, а расширение области применения устройства за счет увеличения рабочей зоны коррекции сопрягаемых изделий. 1 з.п. ф-лы, 1 ил.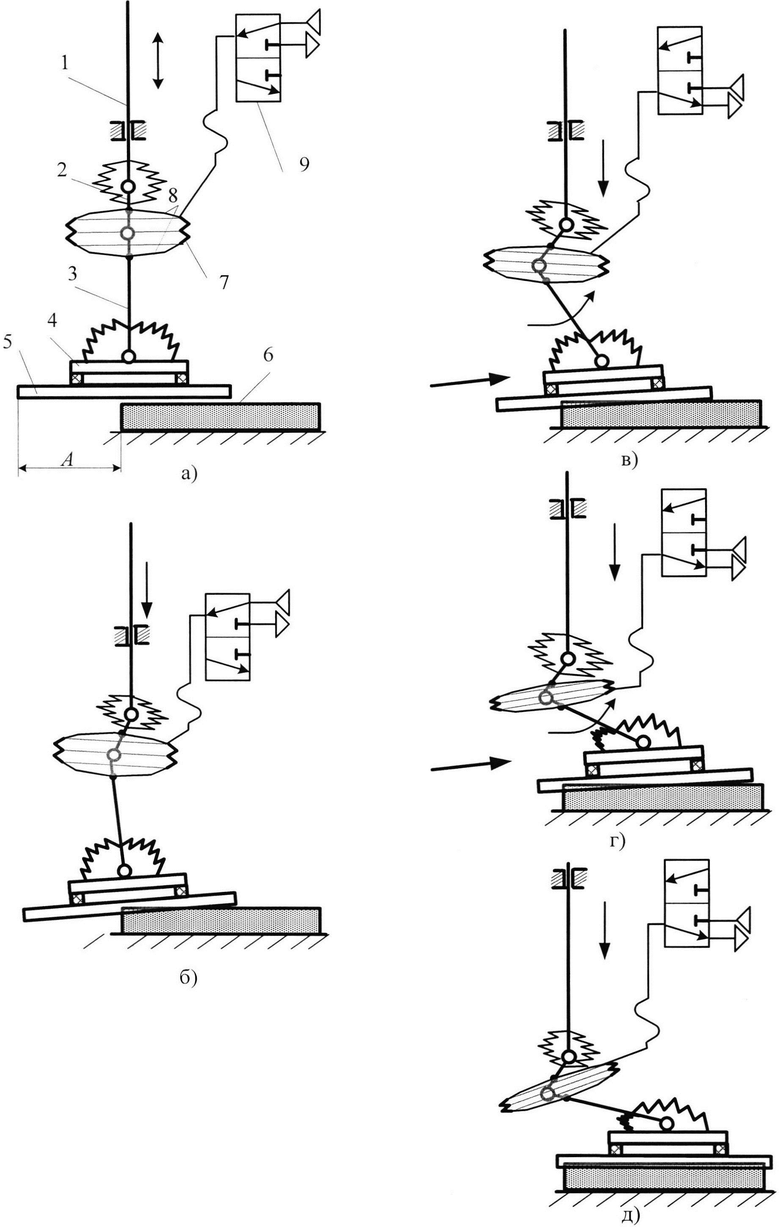
1. Захватный корректирующий модуль, содержащий привод линейного перемещения подвижного рабочего органа, рычаги, шарнирно соединенные между собой, последовательно установленные между захватом и подвижным рабочим органом, закрепленные с возможностью перекоса и подпружиненные относительно среднего положения, отличающийся тем, что он снабжен поворотным механизмом, выполненным в виде герметичной камеры, образованной корпусом с закрепленными на нем мембранами, соединенными с рычагами, выполненной с возможностью соединения с пневматическими линиями питания и охвата места соединения рычагов.
2. Захватный корректирующий модуль по п.1, отличающийся тем, что корпус поворотного механизма выполнен в виде сильфона.
| Мокрый газгольдер высокого давления | 1960 |
|
SU147155A1 |
| Фотоэлектрическая установка наведения и гидирования оптических инструментов на цель | 1959 |
|
SU128150A1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| Способ определения штампуемости листовых металлов | 1958 |
|
SU115711A1 |
| WO 1996030169 A1, 03.10.1996. | |||

