Предлагаемое устройство относится к области машиностроения, роботостроения и может использоваться в пневматическом и гидравлическом оборудовании.
Наиболее эффективно применение устройства при выполнении сборочных операций для устранения рассогласования взаимного расположения осесимметричных изделий.
Известны пневматические приводы криволинейного перемещения, в которых для перемещения рабочих органов применяются два сильфона (см. пат. РФ МПК F15B 15/10 №23929 «Привод криволинейного перемещения», Васин В.А., опубл. 20.07.2002 г., Бюл. №20, пат. РФ МПК F15B 15/10 №2215199 «Привод криволинейного перемещения с кольцевым сильфоном», Васин В.А., опубл. 27.10.2003 г., Бюл. №30). Устройства содержат два сильфона, один из которых помещен внутри другого, а торцевые поверхности заглушены, образуя полость, выполненную с возможностью соединения со средством создания давления рабочей среды. Сильфоны установлены таким образом, что их оси не совпадают. Этим обеспечивается криволинейное перемещение за счет силового воздействия рабочей среды.
Данные устройства имеют сложное конструктивное исполнение, ограниченные функциональные возможности и область применения, так как рабочий орган может перемещаться только по одной траектории.
Известны пневматические приводы криволинейного перемещения, в которых для перемещения органов применяются один сильфон (см. пат. РФ МПК F15B 15/10 №2206011 «Смещенный щелевой затвор с криволинейной траекторией перемещения», Васин В.А., опубл. 10.06.2003 г., Бюл. №16; пат. РФ МПК F15B 15/10, №2206012 «Щелевой затвор с криволинейной траекторией перемещения», Васин В.А., опубл. 10.06.2003 г., Бюл. №16; пат. РФ МПК F15B 15/10, №2215224 «Бескорпусной затвор с криволинейной траекторией перемещения», Васин В.А., опубл. 27.10.2003 г., Бюл. №30). В данных устройствах сильфон выполнен неосесимметричным. У части гофр сильфона центры внешней и внутренней окружностей гофра не совпадают. Конструктивное исполнение сильфона позволяет реализовывать криволинейное перемещение рабочего органа под воздействием давления рабочей среды.
Использование одного сильфона упрощает конструкцию и повышает надежность работы устройств, но необходимость использования сильфона специфической формы усложняет их изготовление. Кроме этого, данные устройства также обладают ограниченными функциональными возможностями и областью применения, реализуя криволинейное перемещение только по одной траектории.
Известны приводы криволинейного перемещения, которые имеют расширенную область применения за счет реализации требуемых траекторий криволинейных перемещений. Данные устройства представляют собой механические рычажные приводы, передаточный механизм которых включает два рычага, шарнирно соединенных между собой (см. пат. РФ МПК F25J 15/06 №147155 «Захватный корректирующий модуль», Сысоев СМ., Литвинов И.С., Юнцзе Цао, опубл. 27.10.2014 г., Бюл. №30; пат. РФ МПК F25J 15/06 №2622071 «Захватный корректирующий модуль», Сысоев С.Н., Литвинов И.С., Мольков А.А, опубл. 09.06.2017 г., Бюл. №16), или один рычаг (см. пат. РФ МПК F25J 15/06 №170165 «Захватный корректирующий модуль», Сысоев С.Н., Литвинов И.С., Овчинников В.А., опубл. 17.04.2017 г., Бюл. №11; пат. РФ МПК F25J 15/06 №128150 «Захватный корректирующий модуль», Сысоев С.Н., Столяров А.В., опубл. 20.05.2013 г., Бюл. №14).
В данных устройствах внешним силовым воздействием осуществляется перекос рычагов, взаимным расположением которых задается требуемое направление криволинейного перемещения. Устройства отличаются расширенными функциональными возможностями, однако область их применения ограничена необходимостью создания осевого силового воздействия на рычаги со стороны приводного механизма в процессе их функционирования. Кроме этого, существенным недостатком устройств является низкая точность воспроизведения заданной траектории криволинейного перемещения.
Наиболее близким из известных по технической сущности является устройство (см. пат. РФ МПК F25J 15/06 №2691155 «Захватный корректирующий модуль», Сысоев С.Н., Литвинов И.С., Гребняков П.М., опубл. 27.09.2018 г., Бюл. №27), включающее рычаги, шарнирно соединенные между собой, закрепленные с возможностью перекоса, а в месте соединения рычагов, установлен поворотный механизм, состоящий из сильфона и заглушек, образующих герметичную камеру, охватывающую место соединения рычагов, выполненную с возможностью соединения с пневматическими линиями питания. Устройство работает следующим образом. Внешнее силовое воздействие на рычаг в начале функционирования привода приводит к перекосу рычагов, взаимным расположением которых задается направление требуемого криволинейного перемещения. Создание давления разрежения в камере сильфона приводит к его сжатию, дальнейшему повороту рычагов и выполнению криволинейного перемещения.
Данное устройство расширяет функциональные возможности привода, однако оно обладает низкой силовой характеристикой, гак как для реализации криволинейного перемещения используется ограниченное по величине давление разрежения воздуха. Применение рычагов, шарнирно связанных между собой, усложняет конструкцию, снижает надежность и долговечность его работы. Кроме этого, наличие бокового внешнего силового воздействия на подвижный рабочий орган в процессе работы привода приводит к его отклонению от требуемой траектории движения. Все вышесказанное снижает эффективность работы привода.
Задачей изобретения является повышение эффективности работы привода криволинейного перемещения путем увеличения силовых характеристик при сохранении его массогабаритных параметров, конструктивного упрощения, устранения возможности отклонения от заданной траектории.
Поставленная задача достигается тем, что в приводе криволинейного перемещения, включающем поворотный механизм, состоящий из кольцевого сильфона, по оси которого на торцах закреплены две заглушки, образующие герметичную полость, выполненную с возможностью соединения со средством давления, в полости на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга.
В приводе криволинейного перемещения с целью устранения отклонения криволинейного перемещения от заданной траектории в полости сильфона могут быть установлены радиальные направляющие, выполненные с возможностью взаимодействия с гибкой нерастяжимой тягой.
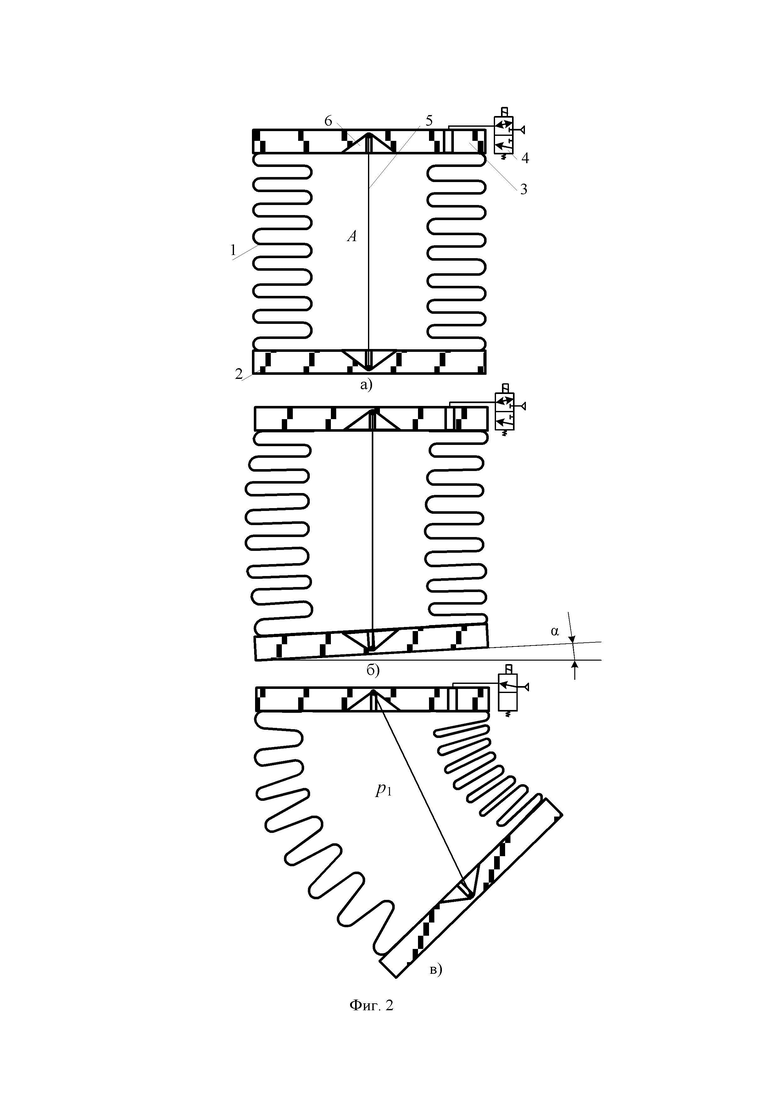
Пример предлагаемого устройства представлен на чертежах, где показаны схема привода (фиг. 1), этапы его работы (фиг. 2) и вид общий поворотного механизма (фиг. 3), соответственно исходного (фиг. 3, а) и конечного (фиг. 3, б) положения.
В приводе криволинейного перемещения (фиг. 1) торцевые поверхности сильфона 1 закрыты заглушками 2 и 3, образуя герметичную полость А, выполненную с возможностью соединения через распределитель 4 с линией питания избыточного давления воздуха. В полости А на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга 5 и установлены радиальные направляющие 6, выполненные с возможностью взаимодействия с тягой.
Устройство работает следующим образом.
В исходном положении (фиг. 2, а) полость А соединена через распределитель с атмосферой. Сильфон за счет упругости гофр занимает симметричное относительно оси положение. Заглушки располагаются параллельно друг другу.
Поворотом заглушки 2 на угол α (фиг. 2, б) относительно заглушки 3 задают направление ее криволинейного перемещения.
Для осуществления приводом требуемого криволинейного перемещения включают распределитель 4, соединяя полость А с линией питания воздухом (фиг. 2, в). Силовое воздействие от избыточного давления р1 воздуха в полости А приводит к криволинейному перемещению заглушки 2 относительно заглушки 3. Чем больше величина давления в полости А, тем больше величина криволинейного перемещения.
Изменению траектории заданного криволинейного перемещения от влияния возможных боковых силовых воздействий противодействуют радиальные направляющие 6, с которыми взаимодействует тяга 5.
При выключении распределителя 4 полость А соединяется с атмосферой, уменьшается величина избыточного давления до пуля и устройство занимает исходное положение.
Таким образом, предлагаемое техническое решение повышает эффективность работы привода криволинейного перемещения путем увеличения силовых характеристик при сохранении его массогабаритных параметров, конструктивного упрощения, устранения возможности отклонения от заданной траектории.
Моделирование, макетирование, проведенные натурные исследования предлагаемого устройства подтвердили его работоспособность, эффективность и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод криволинейного перемещения | 2020 |
|
RU2736902C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749545C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2749544C1 |
| Привод криволинейного перемещения | 2019 |
|
RU2722916C1 |
| Сильфонный привод криволинейного перемещения | 2022 |
|
RU2785181C1 |
| Способ работы сильфонного привода криволинейного перемещения | 2021 |
|
RU2765865C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2657672C1 |
| Захватный корректирующий модуль | 2016 |
|
RU2622071C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2668241C1 |
| Способ сборки деталей типа вал-втулка | 2015 |
|
RU2638089C2 |


Привод относится к области машиностроения, роботостроения и может использоваться в пневматическом и гидравлическом оборудовании. В приводе, включающем поворотный механизм, состоящий из кольцевого сильфона, по оси которого на торцах закреплены две заглушки, образующие герметичную полость, выполненную с возможностью соединения со средством давления, в полости на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга. В приводе могут быть установлены радиальные направляющие, выполненные с возможностью взаимодействия с тягой. Техническое решение повышает эффективность работы привода криволинейного перемещения путем увеличения силовых характеристик при сохранении его массогабаритных параметров, конструктивного упрощения, устранения возможности отклонения от заданной траектории. 1 з.п. ф-лы, 3 ил.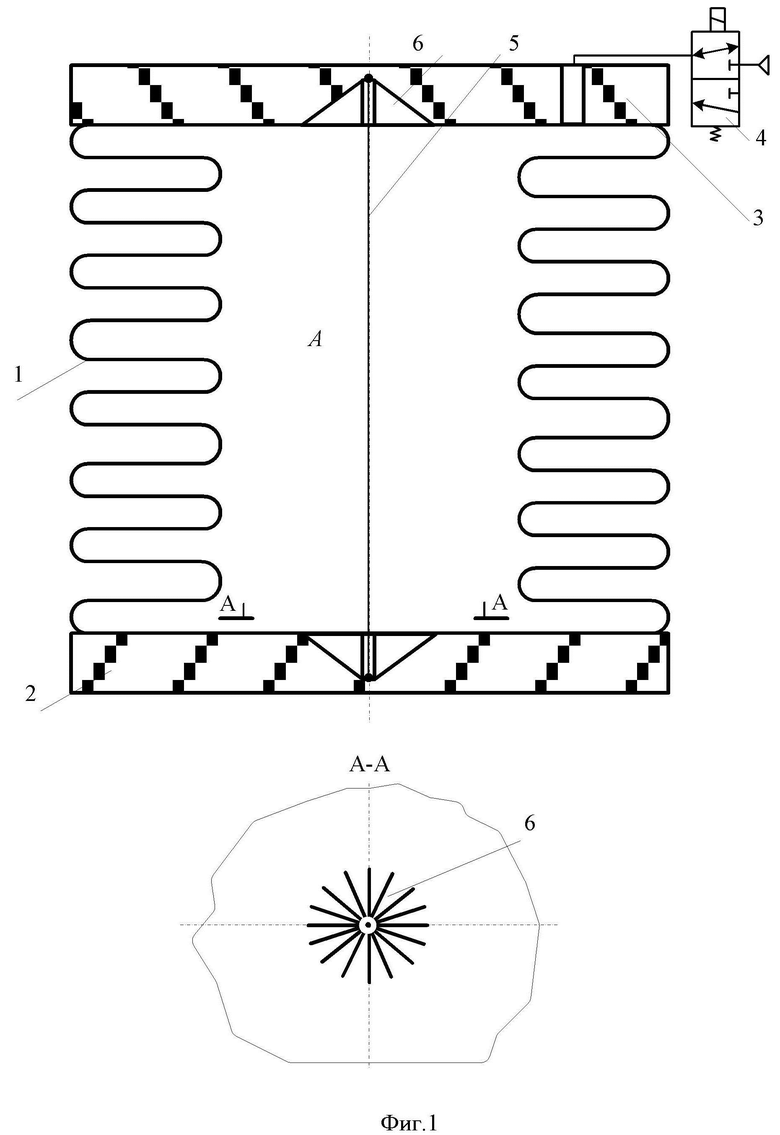
1. Привод криволинейного перемещения, включающий поворотный механизм, состоящий из кольцевого сильфона, по оси которого на торцах закреплены две заглушки, образующие герметичную полость, выполненную с возможностью соединения со средством давления, отличающийся тем, что в полости на заглушках по оси сильфона закреплена гибкая нерастяжимая тяга.
2. Привод криволинейного перемещения по п. 1, отличающийся тем, что в полости сильфона установлены радиальные направляющие, выполненные с возможностью взаимодействия с тягой.
| JP H03113104 A, 14.05.1991 | |||
| DE 10149395 A1, 24.04.2003 | |||
| Устройство для непрерывного производства плоских спичек из полосы папки и т.п. | 1928 |
|
SU23929A1 |
| БЕСКОРПУСНОЙ ЗАТВОР С КРИВОЛИНЕЙНОЙ ТРАЕКТОРИЕЙ ПЕРЕМЕЩЕНИЯ | 2002 |
|
RU2215224C1 |
| ЩЕЛЕВОЙ ЗАТВОР С КРИВОЛИНЕЙНОЙ ТРАЕКТОРИЕЙ ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2206012C1 |

