Предлагаемое устройство относится к области машиностроения, роботостроения и может применяться при взятии и установке изделий на рабочую поверхность с требуемым ходом перемещения захватной головки. Наиболее эффективно применение устройств, использующих безнасосные вакуумные захваты.
Агрегатно-модульные устройства представляют собой систему взаимосвязанных модулей, каждый из которых обладает функциональной полнотой и конструктивной завершенностью (см., Сысоев С.Н. «Принципы и методы нахождения технических решений. Метод исследования функционально-физических связей»: моногр. / С.Н.Сысоев, Владим. гос. ун-т. - Владимир: Изд-во Владим. гос.ун-та, 2007. - с. 21). В данном случае рассматриваются устройства, состоящие из захватной головки и привода ее перемещения.
Известны вакуумные захватные агрегатные модули (см. а.с. №1389154, Сысоев С.Н., Черкасов Ю.В.), состоящие из функционально связанных насосной вакуумной захватной головки и вакуумного привода ее перемещения, выполненного в виде сильфона. Данное устройство незначительно повышает быстродействие выполнения от одного сигнала управления функции «взять» изделие, так как используется вакуумный источник энергопитания с низкой мощностью. Кроме этого, кроме электрического источника энергопитания, требуется применение вакуумного насоса, что усложняет конструкцию в целом.
Известны вакуумные захватные агрегатные модули (см. патент России №2073601 «Вакуумное захватное устройство», Сысоев С.Н., Черкасов Ю.В., Мокеева Е.В., Глушков А.А., патент РФ №2318653 «Захватная головка», Сысоев С.Н., Бакутов А.В., Орехов Н.С., опубл. в Бюл. №7, 10.03.08 г.), где для питания применяется избыточное давление воздуха. Вакуумное захватное устройство содержит привод вертикального перемещения присоски, выполненный в виде двух пневмоцилиндров одностороннего действия, кинематически связанных между собой или одного силового цилиндра двухстороннего действия. Применение в качестве энергопитания избыточного давления воздуха повышает быстродействие, но требует насосной системы вакуумного энергопитания и избыточного давления, что усложняет конструкцию в целом.
Применение в модулях известных безнасосных захватных головок (см. Сысоев С.Н., Бакутов А.В., Приведенец И. А. «Конструирование быстродействующих вакуумных захватов», журнал СТИН, 2007 г., №12, с. 15-19; патент РФ №2304505 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.08.2007 в БИ №23; патент РФ №2317452 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.02.08 в БИ №5; патент РФ №2312762 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.02.08 в БИ №5) повышает быстродействие, надежность выполнения операций «захватить», «отпустить» изделие и устраняет необходимость применения системы вакуумного энергопитания. Однако использование в известных захватных модулях в качестве привода вертикального перемещения присоски пневмоцилиндров, имеющих трением скольжения поршня ограничивает быстродействие устройств. Кроме этого, требуется применение электрического и пневматического источников энергопитания, что усложняет конструкцию в целом.
Наиболее близким по технической сущности из известных является вакуумный захватный агрегатный модуль (см. патент РФ №2397857 «Вакуумный захватный агрегатный модуль», Сысоев С.Н. и др., опубл. 27.08.2010 в БИ №24), включающий пневмопривод одностороннего действия, выполненный в виде рабочей камеры с избыточным давлением воздуха и подвижного рабочего органа, на котором закреплена безнасосная захватная головка. За счет устранения трения скольжения в пневмоцилиндре данное устройство повышает быстродействие выполнения функций «взять» и «установить» изделие на рабочую поверхность. Однако кинематическое разделение подвижного рабочего органа с корпусом цилиндра снижает надежность сохранения требуемого направления движения захватной головки. Кроме этого, для его работы требуется использование электрических и пневматических источников энергопитания, что усложняет конструкцию в целом.
Таким образом, прототип и все известные вакуумные захватные агрегатно-модульные устройства, обладают конструктивной сложностью и применяют нескольких видов энергопитания.
Задачей предлагаемого изобретения является упрощение конструкции при сохранении быстродействия путем применения безнасосного пневмопривода перемещения захватной головки.
Поставленная задача достигается тем, что в вакуумном захватном агрегатном модуле, содержащем захватную головку в виде безнасосной присоски, закрепленной на штоке привода ее осевого перемещения, привод осевого перемещения выполнен в виде торообразной герметичной гибкой нерастяжимой камеры с избыточным давлением воздуха, охватывающей шток, соединенный тягой с электромеханическим приводным механизмом перемещения захватной головки.
Пример реализации предлагаемого устройства и этапы его работы показан на чертеже фиг.
Устройство (фиг. а) состоит из корпуса 1, в котором закреплена торообразная герметичная гибкая нерастяжимая оболочка 2, образующая камеру 3 с избыточным давлением воздуха, охватывающая шток 4 с установленной на нем безнасосной вакуумной захватной головкой 5 с рычагом 6, закрепленным на ее уплотнительном элементе. Захватная головка установлена в направлении изделия 7, расположенного на рабочей поверхности 8, и выполнена с возможностью осевого перемещения относительно штока 4 подпружинено пружиной 9. Шток 4 соединен тягой 10 с электромеханическим приводным механизмом 11. На корпусе установлен фиксатор 12 и датчик 13 верхнего положения штока 4. На приводе установлен датчик 14 верхнего положения захватной головки 5 относительно штока 4.
Вакуумный захватный агрегатный модуль работает следующим образом.
В исходном положении (фиг. а) шток 4 занимает крайнее верхнее положение и зафиксирован фиксатором 12. Оболочка 2 взаимодействует с датчиком 13, отключая электромеханический приводной механизм 11. Датчик 14 отключен, так как захватная головка 5 относительно штока 4 занимает крайнее нижнее положение.
По команде «взять изделие» (фиг. б) срабатывает фиксатор 12, расфиксируя положение штока 4 относительно корпуса 1.
Привод перемещения захватной головки представляет собой камерный торообразный привод одностороннего действия, управляемый с использованием эффективной площади торцевых поверхностей камеры (см. патент России №2586379 «Способ управления перемещением штока камерного привода», Сысоев С.Н., опубл. В Бюл. №16, 10.06.2016 г).
Так как площадь кольцевого отверстия в нижней торцевой поверхности камеры больше, чем в верхней, то на шток действует выталкивающая сила, направленная к изделию 7. Выполняется функция опускания захватной головки на поверхность изделия.
После касания захватной головки поверхности изделия (фиг. в) в результате продолжающегося перемещения штока 4 и ее силового взаимодействия с изделием 6 выполняется функция его захвата. Срабатывает датчик 14, включая электромеханических приводной механизм 11.
Тягой 10 перемещается шток 4 вверх (фиг. г), поднимая захватную головку с изделием. Выполняется функция поднятия изделия.
В крайнем верхнем положении штока 4 срабатывает датчик 13, отключая электромеханический привод 11 и включая фиксатор 12. Устройство занимает исходное положение (фиг. а), отличающееся тем, что захват удерживает изделие.
Для выполнения функции «установить изделие» применяют известные захваты (см. патент РФ №2304505 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.08.2007 в БИ №23), например, с закрепленным на уплотнительном элементе рычажным механизмом.
По команде «установить изделие» на рабочую поверхность захватный модуль выполняет такие же действия, какие выполнялись при взятии изделия. При приближении изделия к рабочей поверхности 8 первоначально рычаг 6 взаимодействует с ней. Данное силовое взаимодействие приводит к тому, что край присоски отводится от поверхности изделия, ее рабочая полость разгерметизируется, то есть выполняется операция отпускания изделия присоской.
Таким образом, применение безнасосной вакуумной захватной головки и камерного привода ее перемещения, позволяют использовать только электрический вид энергопитания, что существенно упрощает конструкцию устройства при сохранении быстродействия. Кроме этого, данное техническое решение позволяет использовать в качестве захватной головки электромагнитный захват, что расширяет область его применения.
Во Владимирском государственном университете был изготовлен действующий макет захватного модуля. Натурные испытания подтвердили его промышленную применимость и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| Сильфонный привод криволинейного перемещения | 2022 |
|
RU2785181C1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2304505C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2006 |
|
RU2312762C1 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2008 |
|
RU2370359C1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |

Изобретение относится к области машиностроения, роботостроения и может применяться при взятии и установке изделий на рабочую поверхность с требуемым ходом перемещения захватной головки. Вакуумный захватный агрегатный модуль содержит захватную головку в виде безнасосной присоски, закрепленной на штоке привода ее осевого перемещения, и привод осевого перемещения выполнен в виде торообразной герметичной гибкой нерастяжимой камеры с избыточным давлением воздуха, охватывающей шток, соединенный тягой с электромеханическим приводным механизмом перемещения захватной головки. Изобретение обеспечивает упрощение конструкции устройства при сохранении быстродействия. 1 ил.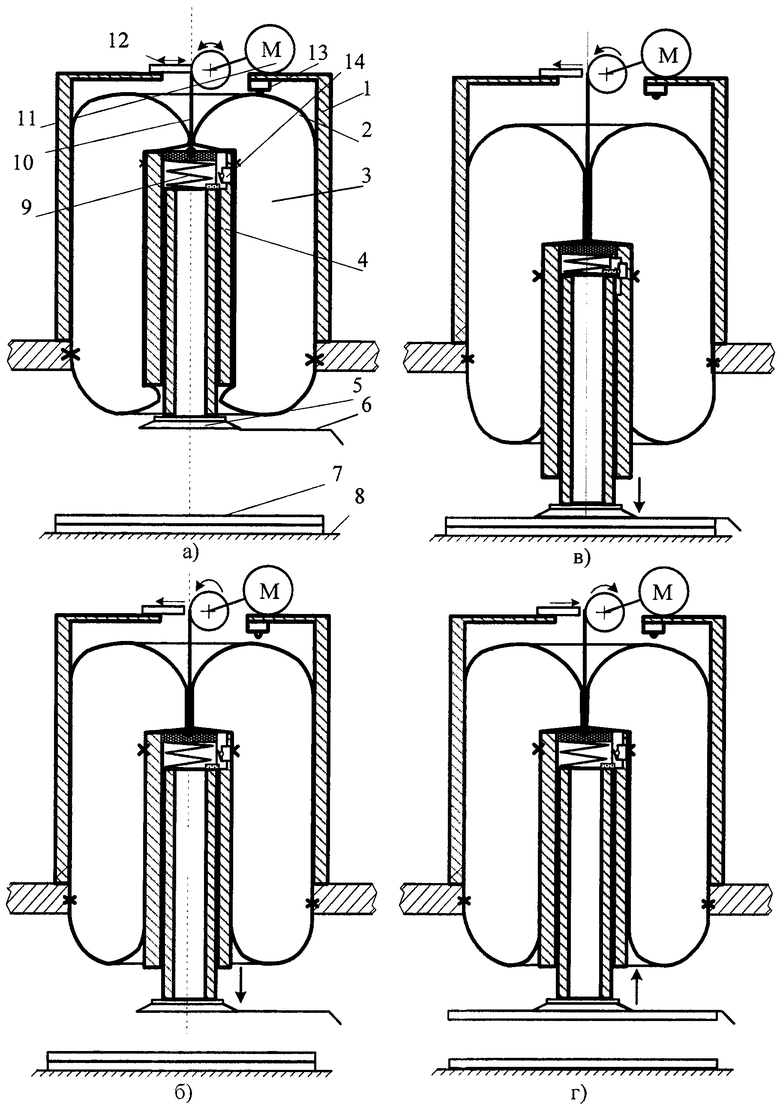
Вакуумный захватный агрегатный модуль, содержащий захватную головку в виде безнасосной присоски, закрепленной на штоке привода ее осевого перемещения, отличающийся тем, что привод осевого перемещения выполнен в виде торообразной герметичной гибкой нерастяжимой камеры с избыточным давлением воздуха, охватывающей шток, соединенный тягой с электромеханическим приводным механизмом перемещения захватной головки.
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА КАМЕРНОГО ПРИВОДА | 2014 |
|
RU2586379C1 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1994 |
|
RU2073601C1 |
| ОТДЕЛЕНИЯ ВОЛНЫ ТИПА Нщ ОТ ДРУГИХ волн ТИПА Н в КРУГЛОМ ВОЛНОВОДЕ | 0 |
|
SU130074A1 |
| US 20070187965 A1, 16.08.2007. | |||

