Изобретение относится к области геодезии и может быть использовано при развитии (восстановлении) геодезических сетей, создаваемых для решения задач навигации, кадастра, исследований современных движений земной коры и т. д.
В настоящее время при топографических съёмках местности практически всегда используют приёмники сигналов существующих глобальных навигационных спутниковых систем (ГНСС) см. описания к патентам US 9541392 B2 07.02.2017, US 20040030571 A1. 12.12.2004, US 20200240784 A1. 30.07.2020.
Однако в приполярных областях планеты навигационные космические аппараты наблюдаются только вблизи горизонта и даже скрываются за ним, что ограничивает точность геодезических определений, хотя необходимость топографических съёмок местности сохраняется, например, из-за подвижек земной коры. Такие подвижки вызываются таяньем вечной мерзлоты, оползнями и т. д. Кроме того, из-за техногенных воздействий, некоторые пункты могут быть утрачены и требуется их восстановление.
Даже при недоступности сигналов глобальных навигационных спутниковых систем геодезические определения можно производить классическими геодезическими способами, например, используя средства мобильного комплекса навигации и топопривязки, см. патент RU 2444451 С2 10.03.2012.
Это изобретение решает задачу достижения технического результата, заключающегося в создании именно мобильного комплекса, а не в повышении качества и производительности топографических съёмок местности. Аналогичные решения известны из патентов (RU2423720 C1 10.07.2011, RU2423720 C1 10.07.2011, RU2567865 C1 10.11.2015, RU2601494 C1 10.11.2016, RU2724120 C1 22.06.2020, WO2012110635 23.08.2012 и US20180135969 A1 17.05.2018).
Сравнительно производительно, но недостаточно точно, задача топографических съёмок местности может быть решена при выполнении наблюдений с беспилотного летательного аппарата или с платформы, размещённой на крыше автомобиля во время их перемещения, см. патент РФ RU2650051 С2 19.01.2016 и патент США US5421096 от 06.06.1995 г.
При перемещении оператора по платформе с геодезическим прибором она теряет стабильность, что отрицательно влияет на точность геодезических определений. Частично этот недостаток исключает техническое решение по патенту RU 2251074 С2 27.04.2005 «Устройство для проведения топографической съёмки местности».
Это техническое решение предполагает наличие над платформой с геодезическим прибором на крыше автомобиля перемещаемого дополнительного пола, в пределах которого перемещается оператор. Пол закреплён на четырёх вертикальных штангах, соединенных с гидроцилиндрами, которые крепятся к жесткой раме, установленной на передней и задней осях автомобиля. Это обстоятельство не гарантирует стабильность положения геодезического прибора при перемещениях оператора вокруг него. Конструкция «Устройства топографической съёмки местности» по патенту RU 2251074 С2 достаточно сложна, сам оператор находится на крыше автомобиля и ничем не защищён при непогоде. Управление геодезическим прибором не автоматизировано, что отрицательно влияет на производительность топографических съёмок.
Целями изобретения «Способ топографической съёмки местности и топографическое комплексное средство для его осуществления» является сокращение затрат времени на этот вид работ, повышение их качества при обеспечении лучшей защиты оператора от непогоды.
Сущность способа топографической съёмки местности заключается в том, что сопоставляют визирные цели с геодезическими точками, зафиксированными реперами геодезических сетей, или просто характерными точками топографических объектов. Дислоцируют подвижную платформу с геодезическим прибором в зоне видимости визирных целей. Выполняют привязку координатных систем геодезического прибора и визирных целей к геодезическим точкам путём совмещения вертикальной оси с отвесной линией, проходящей через центр геодезического пункта (точки). Аналогичную операцию производят относительно визирных целей (дистанционно или непосредственно), а при геодезической засечке визирных целей прибором определяют координаты их точек по элементам, измеренным или построенным на них, или на исходных пунктах, см. ГОСТ 22268 76.
На заключительном этапе топографической съёмки местности математически обрабатывают зафиксированные на машинном носителе информации результаты засечки визирных целей для получения уравненных значений координат геодезических точек.
Предложенный модернизированный способ топографической съёмки местности включает размещение геодезического прибора с оптико-электронным визиром и трегера на дистальном узле подъёмного механизма, жёстко связанным с подвижным шасси, и перемещение этого узла с геодезическим прибором на трегере, которые снабжёны электронными отсчётными устройствами, сервоприводами на высоту, достаточную для засечки визирных целей. Ориентацию геодезического прибора и засечку визирных целей с его помощью производят с электронно-вычислительного блока, размещаемого вне дистального узла подъёмного механизма и снабжённого модемом связи с электронными отсчётными устройствами, сервоприводами геодезического прибора и трегера.
Топографическое комплексное средство на подвижном шасси, снабжённое подъёмным механизмом и геодезическим прибором на трегере, предложено комплектовать электронно-вычислительным блоком, модемами связи этого блока с геодезическим прибором на трегере, размещаемым на дистальном узле подъёмного механизма жёстко, связанным с подвижным шасси. Именно на дистальном узле подъёмного механизма размещают геодезический прибор с оптико-электронным визиром и трегер, комплектуемые электронными отсчётными устройствами и сервоприводами и модемами связи с электронно-вычислительным блоком дистанционного управления, пространственной ориентацией геодезического прибора и геодезической засечкой им визирных целей.
Сам электронно-вычислительный блок размешают вне дистального узла подъёмного механизма так, чтобы было удобно работать с ним.
При реализации конкретного исполнения топографического комплексного средства базовым геодезическим прибором может быть роботизированный тахеометр, базовым трегером - гексапод с платой для размещения геодезического прибора, имеющей 6 степеней свободы.
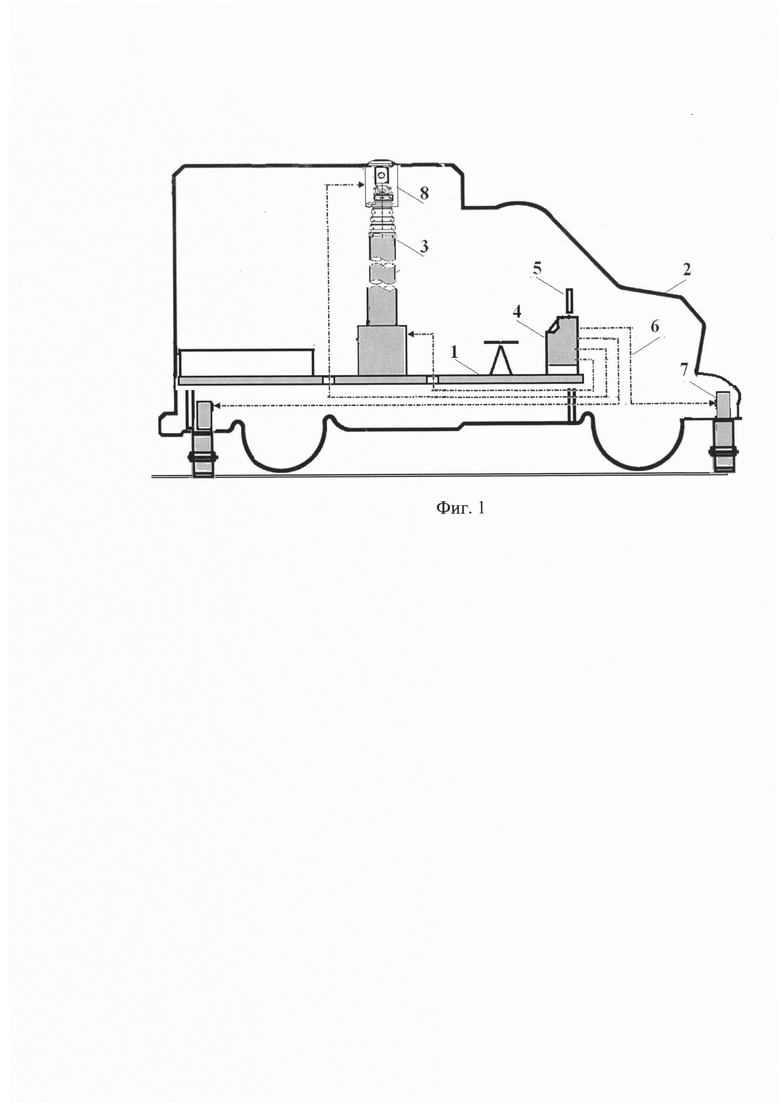
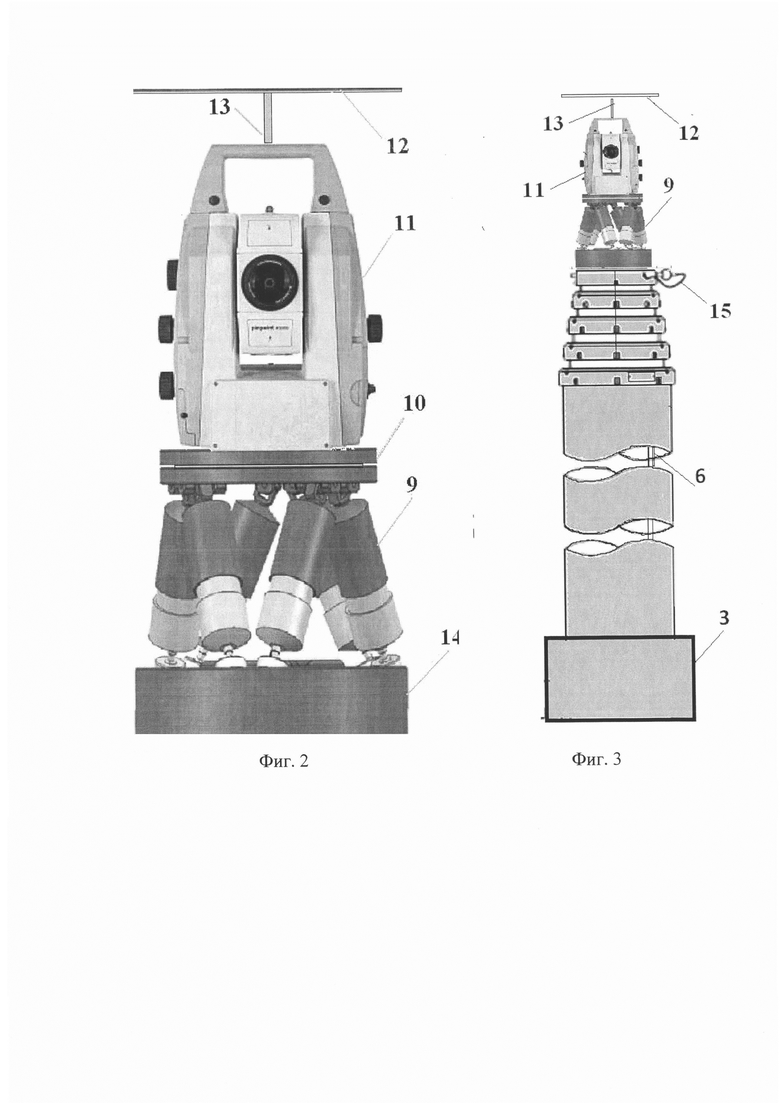
На рисунке 1 (фиг. 1) представлен вариант компоновки предложенного топографического комплексного средства. На рисунке 2 (фиг. 2) отображён в более крупном масштабе дистальный узел подъёмного механизма, которым укомплектовано это средство. На рисунке 3 (фиг. 3) изображён сам подъёмный механизм с его дистальным узлом.
Топографическое комплексное средство сформировано на платформе 1 автомобиля 2 с подъемным механизмом 3, размещённом на платформе 1, и дистанционно удалённым электронно-вычислительным средством 4 с дисплеем 5 (фиг. 1).
Электронно-вычислительный блок может быть выполнен мобильным, таким, как «ноутбук», для управления вне автомобиля 2 по линиям связи 6, домкратами 7, подъемным механизмом 3 и топогеодезическим оборудованием дистальным узла 8 подъемного механизма. Топогеодезическое оборудование дистального узла 8 подъемного механизма 3 включает трегер (гексапод) 9 с платой 10 для размещения на ней геодезического прибора 11 с оптико-электронным визиром. Дистальный узел 8 подъемного механизма 3 дополнительно снабжён и экраном 12 для защиты геодезического прибора от прямых солнечных лучей на штоке 13 (фиг. 1-3).
Кроме трегера 9 и геодезического прибора 11 дистальный узел подъёмного механизм имеет отсек 14 для размещения аккумуляторов или кабельных систем электропитания, модемов связи с электронно-вычислительным блоком управления ориентированием геодезического прибора 11 и засечки им визирных целей.
Сами системы электропитания, электронные отсчётные устройства, сервоприводы, модемы кабельной или проводной связи с электронно-вычислительным блоком на рисунках (фиг. 1-3) не отображены. Электропитание дистального узла 8 подъемного механизма 3 может осуществляться от аккумуляторов или по проводам 15 (фиг. 3).
Способ топографической съёмки местности реализуется в следующей последовательности.
На местности определяют точки, геодезические координаты которых не могут быть получены с помощью приёмников сигналов глобальных навигационных спутниковых систем и места, доступные для нахождения на них топографического комплексного средства. При необходимости геодезические точки закрепляют реперами.
После прибытия комплексного средства для проведения топографических съёмок местности на выбранную точку или геодезический пункт стабилизируют платформу 1 автомобиля 2 и размещённого на ней подъемного механизма (фиг. 1).
Эту операцию выполняют, управляя домкратами 7 при помощи электронно-вычислительного средства с дисплеем 5 через линии связи 6, что можно делать вне автомобиля, если электронно-вычислительное средство 4 мобильное (ноутбук).
Контроль выравнивания платформы относительно горизонта позволяют осуществлять электронные отсчётные устройства геодезического прибора 11 и трегера 9.
В стандартную комплектацию дистального узла 8 подъёмного механизма 3 входит, по крайней мере, один электронный уровень, что делает доступными для оператора данные о наклонах геодезического прибора относительно вертикали. Оператор в соответствии с ними корректирует домкратами положение платформы 1.
Для засечки визирных целей необходимо, чтобы они попадали в поле зрения оптико-электронного визира геодезического прибора 11 и затем отображались на дисплее 5 электронно-вычислительного средства 4 (фиг. 1).
С этой целью, при осуществлении кругового сканирования местности геодезическим прибором, перемещают по вертикали подъёмным механизмом 3 его дистальный узел 8 до тех пор, пока доступные для наблюдения визирные цели не станут попадать в поле зрения оптико-электронного визира.
С помощью электронно-вычислительного средства выполняют и ориентирование геодезического прибора 11 относительно отвесной линии.
Далее координатную систему геодезического прибора привязывают к точке стояния комплексного средства для проведения топографической съёмки местности путём совмещения вертикальной оси пространственно-ориентированной координатной системы геодезического прибора с отвесной линией, проходящей через такую точку или репер геодезической сети. Эту стандартную задачу, например, позволяет решать теодолит, размещённый вне автомобиля. Наличие штока 13 для крепления солнцезащитного экрана на геодезическом приборе дистального узла 8 подъемного механизма 3 облегчает проектирование осевых точек штока на землю, а угловая засечка одной из его характерных точек - осуществлять высотную привязку геодезического прибора.
На заключительном этапе засечки визирных целей оператор через линии связи с геодезическим прибором управляет его сервоприводами, что позволяет разворачивать и наклонять оптико-электронный визир при засечке им визирных целей.
Такая засечка выполняется при оперативном контроле оператора, наблюдающем визирные цели на дисплее, а результаты каждой из угловых и линейных засечек визирной цели записываются в память электронно-вычислительного средства и отображаются на экране его дисплея.
При снабжении оптико-электронного визира или самого геодезического прибора лазерным дальномером может выполняться как угловая засечка визирных целей, так и линейная.
Математическая обработка результатов засечки визирных целей позволяет находить координаты геодезических точек местности и её объектов, сопоставленных с визирными целями.
Геодезические точки с известными координатами могут быть использованы при развитии и восстановлении геодезических сетей, например, в полярных областях планеты или городах с высотной застройкой, где сигналы глобальных навигационных спутниковых сетей часто недоступны.
Дистанционное определение координат объектов кадастровых участков бывает необходимо и при отсутствии, по каким-либо причинам, доступа к таким объектам, а обработка материалов воздушного или космического дистанционного зондирования Земли не даёт положительного результатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ создания цифрового топографического фотодокумента и комплексное средство для осуществления этого способа | 2017 |
|
RU2665250C2 |
| Способ исправления топографической карты по аэрофотоснимкам стереопары | 1981 |
|
SU1000756A1 |
| Способ обследования пунктов государственной геодезической сети и устройство для его осуществления | 2018 |
|
RU2700739C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЁМКИ МЕСТНОСТИ | 2003 |
|
RU2251074C1 |
| ГЕОДЕЗИЧЕСКИЙ ЗНАК КАШИНА | 2004 |
|
RU2262073C1 |
| Геодезический знак, способ его восстановления и устройство для осуществления этого способа | 2021 |
|
RU2778206C1 |
| СПОСОБ ОБСЛЕДОВАНИЯ ПУНКТОВ ГОСУДАРСТВЕННОЙ ГЕОДЕЗИЧЕСКОЙ СЕТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2587522C2 |
| Комплекс для определения пространственных координат удаленного объекта, расположенного на местности | 2020 |
|
RU2744427C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС НАВИГАЦИИ И ТОПОПРИВЯЗКИ | 2010 |
|
RU2444451C2 |
| КОМПЛЕКТ ВЫНОСНОЙ АППАРАТУРЫ ТОПОПРИВЯЗЧИКА | 2011 |
|
RU2480714C2 |
Изобретение относится к области геодезии и может быть использовано при развитии и восстановлении геодезических сетей и межевании кадастровых участков. Способ топографической съёмки местности включает сопоставление точек местности с визирными целями, дислоцирование в зоне их видимости со стабилизируемого домкратами подвижного шасси с геодезическим прибором, геодезическую засечку им визирных целей и перевычисление результатов засечки визирных целей в координаты сопоставленных с ними точек. При этом геодезический прибор с электронными отсчётными устройствами, сервоприводами и оптико-электронным визиром фиксируют на дистальном узле подъёмного механизма, установленного на подвижном шасси, дистальный узел с модемом связи с периферийными устройствами перемещают на высоту, достаточную для засечки геодезическим прибором визирных целей, с дистанционно размещаемого электронно-вычислительного блока управляют ориентированием геодезического прибора и засечкой с его помощью визирной цели. Топографическое комплексное средство на подвижном шасси со стабилизируемой домкратами платформой, снабжённой подъёмным механизмом и геодезическим прибором на трегере, содержит электронно-вычислительный блок управления ориентированием геодезического прибора и засечкой им визирных целей, модемы связи электронно-вычислительного блока с электронными отсчётными устройствами и сервоприводами трегера и геодезического прибора с оптико-электронным визиром. Геодезический прибор на трегере помещён на дистальный узел подъёмного механизма, который жёстко связан с подвижным шасси, а электронно-вычислительный блок с модемом размещен вне дистального узла подъёмного механизма. В частном случае на топографическом комплексном средстве применяется гексопод, снабженный платой для размещения на ней геодезического прибора и имеющей как линейные, так и угловые степени свободы. Технический результат – сокращение времени проведения топографической съемки, а также повышение качества топографической съемки. 2 н. и 1 з.п. ф-лы, 3 ил.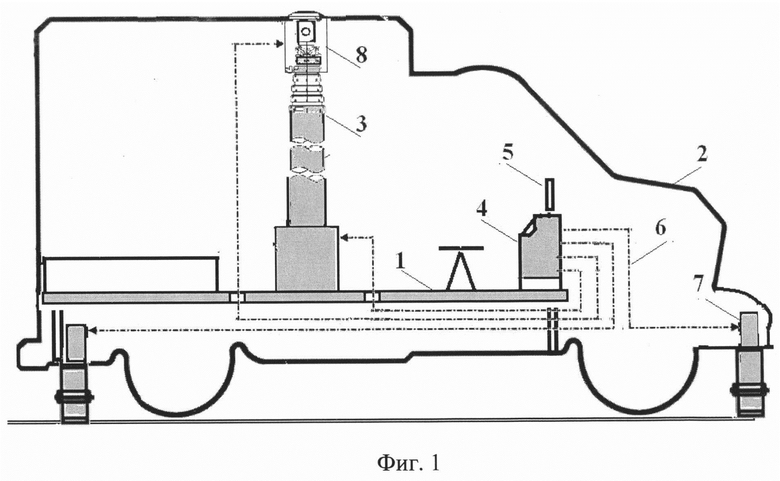
1. Способ топографической съёмки местности, включающий сопоставление точек местности с визирными целями, дислоцирование в зоне их видимости со стабилизируемого домкратами подвижного шасси с геодезическим прибором, геодезическую засечку им визирных целей и перевычисление результатов засечки визирных целей в координаты сопоставленных с ними точек, отличающийся тем, что геодезический прибор с электронными отсчётными устройствами, сервоприводами и оптико-электронным визиром фиксируют на дистальном узле подъёмного механизма, установленного на подвижном шасси, дистальный узел с модемом связи с периферийными устройствами перемещают на высоту, достаточную для засечки геодезическим прибором визирных целей, с дистанционно размещаемого электронно-вычислительного блока управляют ориентированием геодезического прибора и засечкой с его помощью визирной цели.
2. Топографическое комплексное средство на подвижном шасси со стабилизируемой домкратами платформой, снабжённой подъёмным механизмом и геодезическим прибором на трегере, отличающееся тем, что содержит электронно-вычислительный блок управления ориентированием геодезического прибора и засечкой им визирных целей, модемы связи электронно-вычислительного блока с электронными отсчётными устройствами и сервоприводами трегера и геодезического прибора с оптико-электронным визиром, а геодезический прибор на трегере помещён на дистальный узел подъёмного механизма, который жёстко связан с подвижным шасси, а электронно-вычислительный блок с модемом размещен вне дистального узла подъёмного механизма.
3. Топографическое комплексное средство по п. 2, отличающееся тем, что трегер, как и геодезический прибор, снабжен электронными отсчётными устройствами и сервоприводами, конструктивно исполнен как гексопод, снабженный платой для размещения на ней геодезического прибора и имеющей как линейные, так и угловые степени свободы.
| Способ обследования пунктов государственной геодезической сети и устройство для его осуществления | 2018 |
|
RU2700739C1 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ ТОПОГРАФИЧЕСКОЙ СЪЁМКИ МЕСТНОСТИ | 2003 |
|
RU2251074C1 |
| Способ согласования линии визирования оптического прибора с продольной осью наземного транспортного средства | 2017 |
|
RU2657334C1 |
| Устройство для топографической съемки | 1976 |
|
SU623106A1 |
| US 9541392 B2, 10.01.2017. | |||

