Предлагаемое изобретение относится к области навигации, геодезии, картографии, фотограмметрии и может быть использовано для построения топографических планов, трёхмерных моделей местности и объектов, решения инженерно-геодезических задач: построение обмерных чертежей фасадов зданий, выявление отклонений от вертикальности высотных сооружений, определение объема перемещенного грунта для карьеров, различных выработок и т.д., с погрешностью определения пространственных координат в диапазоне от 0.002 м до 0.015 м (2-15 мм).
Далее в тексте заявителем приведены термины, которые необходимы для облегчения однозначного понимания сущности заявленных материалов и исключения противоречий и/или спорных трактовок при выполнении экспертизы по существу.
Удаленный объект, расположенный на местности (далее – объект) - под данным термином заявитель в контексте настоящего описания подразумевает любой объект, расположенный на местности, например, здание, сооружение, а также фрагмент местности.
Система координат комплекса - под данным термином заявитель в контексте настоящего описания подразумевает декартовую систему координат, задаваемую дальномерными станциями заявленного комплекса.
Точки объекта - под данным термином заявитель в контексте настоящего описания подразумевает условные точки, из которых условно состоит удаленный объект, расположенный на местности (объект). Количество точек, выбранных для измерения объекта, определяет детальность (подробность) построения трехмерной модели объекта в системе координат комплекса.
Приближенные координаты - под данным термином заявитель в контексте настоящего описания подразумевает предварительные значения координат, вычисленные на начальном этапе определения пространственных координат.
Общеземная система координат – прямоугольная система координат, центр которой совпадает с центром массы Земли, с осью X, лежащей в плоскости экватора и направленной в сторону Гринвичского меридиана, осью Z, направленной к Северному полюсу, и осью Y, дополняющей систему до правой системы координат [https://official.academic.ru/14638/%D0%9E%D0%B1%D1%89%D0%B5%D0%B7%D0%B5%D0%BC%D0%BD%D0%B0%D1%8F_%D1%81%D0%B8%D1%81%D1%82%D0%B5%D0%BC%D0%B0_%D0%BA%D0%BE%D0%BE%D1%80%D0%B4%D0%B8%D0%BD%D0%B0%D1%82]. Примером общеземной системы координат является система координат WGS-84, ПЗ-90.11 и др.
Топоцентрическая система координат - система координат, начало которой находится в какой-либо точке на поверхности Земли [http://www.geokniga.org/bookfiles/geokniga-cistemy-koordinat-v-geodezii.pdf].
Пространственная система координат калибровочного стенда - под данным термином заявитель в контексте настоящего описания подразумевает декартовую систему координат, начало которой находится в точке, над которой расположен один из тахеометров калибровочного стенда.
Из уровня техники является известным, что беспилотный летальный аппарат (далее по тексту БПЛА) является носителем полезной нагрузки, например, цифровой съёмочной камеры или лазерного сканера, при помощи которой выполняется фотографирование (съёмка) объектов (зданий, инженерных сооружений, фрагментов местности). [Назаров А.С. Фотограмметрия. -- Минск: ТерраСистемс, 2010. С 52-53] [1]; [Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. – М.: Академический проект. 2016. с.75-76] [2]; [Бабашкин Н.М., Кадничанский С.А., Нехин С.С. Сравнение эффективности аэрофототопографической съёмки с использованием беспилотных и пилотируемых авиационных систем. Геопрофи, №1, 2017.- с.14-19] [3].
Также является общеизвестным, что вычисление пространственных координат точек объекта по координатам их изображений требует знания элементов внешнего ориентирования (далее по тексту ЭВО), а именно - пространственного и углового положения БПЛА [Назаров А.С. Фотограмметрия. -- Минск: ТерраСистемс, 2010. С 52-53] [1]; [Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. – М.: Академический проект. 2016. с.75-76] [2].
Также из уровня техники является известным, что наиболее эффективным для использования в заявленных целях, а именно - для определения координат точек объекта с точностью от 0.002 м до 0.015 м (2-15 мм) являются БПЛА-мультикоптер [Патент на изобретение RU №2681836. Способ определения пространственных координат и углового положения удаленного объекта] [4].
Заявителем выполнен анализ уровня техники в указанной области по российским и зарубежным базам патентных данных, статьям, Интернет-ресурсам по тематике использования беспилотных летательных аппаратов (далее по тексту БПЛА) для определения пространственных координат точек объекта в режиме реального времени и в режиме последующей обработки (далее - постобработки).
Анализ уровня техники в целом в указанной области техники позволяет сделать выводы о том, что проблема по определению пространственных координат точек объектов является актуальной и не разрешена до настоящего времени в должной степени.
На дату подачи настоящей заявки существует насущная потребность в комплексе по определению в режиме реального времени и в режиме постобработки пространственных координат точек объектов с точностью, находящейся в диапазоне от 0.002 до 0.015 м (2-15 мм), например, через определение пространственного и углового положения БПЛА с точностью (погрешностью) соответственно не хуже 1-2 мм и 30˝.
Из исследованного уровня техники заявителем выявлено изобретение по патенту РФ № 2567865 «Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов» [5]. В известном техническом решении удаленным объектом является БПЛА. Сущностью известного технического решения является способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов, заключающийся в том, что имеется, как минимум, три дальномерных узла, один из которых - дальномерный узел наводчика, пространственно расположенных на некотором удалении друг от друга и от объекта, но в пределах прямой видимости объекта, и координаты дальномерных узлов определены в одной из выбранных систем координат, при этом дальномерные узлы наводят свои дальномерно-угломерные приборы на объект и определяют расстояния до удаленного объекта, после этого координаты объекта определяют пересечением сфер с центрами в трех либо более дальномерных узлах, характеризующийся тем, что сначала дальномерный узел наводчика наводит свой дальномерно-угломерный прибор на объект и определяет расстояние и угловые координаты объекта, затем по этим измерениям вычисляют первое приближение координат объекта, которые далее передают на остальные дальномерные узлы, которые по этим координатам прицеливают свои дальномерно-угломерные приборы и замеряют расстояния до объекта, затем по измеренным расстояниям вычисляют второе приближение координат объекта, используя для этого расстояние от дальномерного узла наводчика и множество сочетаний расстояний от дальномерных узлов до объекта, взятых попарно, далее вычисленные координаты объекта передают на остальные дальномерные узлы, которые по этим координатам заново прицеливают свои дальномерно-угломерные приборы и определяют расстояния до объекта, затем по измеренным расстояниям вычисляют третье приближение координат объекта и так далее, пока разница в определении координат объекта в двух соседних по порядку выполнения приближениях координат объекта не станет менее порогового значения.
Недостатком известного технического решения по сравнению с заявленным техническим решением являются:
• невозможность определения положения удаленного объекта (в известном техническом решении удаленным объектом является БПЛА) с высокой точностью, поскольку измерение вертикальных и горизонтальных углов, получаемых с помощью углоизмерительных устройств, и измерение дальности выполняется до произвольной точки поверхности БПЛА, вследствие чего точность определения координат не может быть лучше 0.5 м (т.е. 500 мм);
• невозможность определения углового положения (так называемые углы крена, рысканья и тангажа) удаленного объекта (БПЛА), поскольку измерение дальности выполняется до одной произвольной точки поверхности удаленного объекта (БПЛА);
• вычисление приближенных координат удаленного объекта (БПЛА) по результатам измерения дальномерно-угломерным прибором узла наводчика расстояния и угловых координат объекта (вертикального и горизонтального углов);
• определение положения (пространственных координат) удаленного объекта (БПЛА) выполняется измерением расстояний до БПЛА повторяющимися наведениями дальномерно-угломерных приборов до тех пор, пока разница в определении координат БПЛА в двух соседних по порядку выполнения приближениях координат БПЛА не станет менее порогового значения, которое определяется габаритами БПЛА и находится в диапазоне от 0.5 м и более, что значительно больше (более чем на порядок) уступает достигнутым в заявленном техническом решении результатам;
• высокая технологическая сложность реализации процесса наведения (наблюдения) на БПЛА в известном техническом решении;
• высокая трудоемкость реализации процесса наведения (наблюдения) на БПЛА и определения его координат по причине необходимости использования подготовленного наводчика в известном техническом решении.
Наиболее близким по существу и совпадающим признакам с заявленным техническим решением, выбранным заявителем в качестве прототипа, является изобретение заявителя по патенту РФ № 2681836 «Способ определения пространственных координат и углового положения удаленного объекта» [2]. В известном техническом решении удаленным объектом является БПЛА. Сущностью прототипа является способ определения пространственных координат и углового положения удаленного объекта с помощью дальномерных станций, заключающийся в применении не менее трёх дальномерных станций, пространственно расположенных на некотором удалении друг от друга и от удаленного объекта, в пределах прямой видимости удаленного объекта, при этом координаты дальномерных станций определяют в пространственной системе координат, при этом дальномерные станции наводят свои дальномеры на удаленный объект и определяют расстояния до удаленного объекта, после этого координаты удаленного объекта определяют пересечением сфер с центрами в трёх или более дальномерных станциях, вычисляют примерные координаты положения удаленного объекта, отличающийся тем, что выполняют ориентацию дальномерных станций следующим образом: дальномерную станцию 1 ориентируют на дальномерную станцию 2, дальномерную станцию 2 ориентируют на дальномерную станцию 3, дальномерную станцию 3 ориентируют на дальномерную станцию 1, с возможностью увеличения количества дальномерных станций до 4-х и более, выполняют измерения расстояний между дальномерными станциями, вычисляют и задают пространственную систему координат, при этом координаты каждой последующей, 4-й и более, дальномерной станции определяют в пространственной системе координат, заданной дальномерными станциями 1, 2, 3 посредством измерения расстояний от каждой последующей, 4-й и более, дальномерной станции до дальномерных станций 1, 2, 3, определяют в общеземной системе координат посредством ГЛОНАСС/GPS оборудования координаты дальномерных станций и удаленного объекта, который представляет собой беспилотный летательный аппарат, определяют параметры перехода из общеземной системы координат в пространственную систему координат, определяют примерные, с точностью до 2 м, координаты беспилотного летательного аппарата в пространственной системе координат, задаваемой дальномерными станциями с использованием параметров перехода из общеземной системы координат в пространственную систему координат, вычисляют горизонтальный и вертикальный углы наведения для каждой из дальномерных станций, наводят в автоматическом режиме дальномерные станции на беспилотный летательный аппарат, измеряют расстояние от дальномерной станции до отражателей, закреплённых на беспилотном летательном аппарате, далее на базе измеренных расстояний до каждого отдельного отражателя определяют координаты каждого отражателя с использованием способа пересечения сфер из трёх или более дальномерных станций, определяют точные координаты беспилотного летательного аппарата в пространственной системе координат как среднее значение между координатами всех отражателей, вычисляют угловое положение беспилотного летательного аппарата, т.е. определяют угловое положение беспилотного летательного аппарата на основе вычисленных координат отражателей, далее вычисляют пространственные координаты точек на местности по измеренным координатам их изображений, полученных фотокамерой, установленной на беспилотном летательном аппарате, с использованием координат беспилотного летательного аппарата и углового положения беспилотного летательного аппарата в пространственной системе координат.
Из описания прототипа известна система (совокупность отдельных устройств, объединенных в один объект - систему) для реализации известного способа, не включенная в формулу прототипа.
Система включает наземную измерительную систему и систему, закрепленную на объекте (БПЛА) и состоит из не менее чем шести отдельных сборочных элементов, включая три дальномерные станции, а именно:
1. Дальномерные станции (ДС), установленные на штативы, в количестве не менее трёх штук.
2. Блок управления дальномерными станциями.
3. БПЛА, оснащенный отражателями (не менее 3-х отражателей).
4. Блок управления БПЛА.
Сборочные элементы состоят:
1. Дальномерная станция представляет собой устройство, состоящее из следующих элементов:
• лазерного дальномера, например, DIMETIXFLS-C10,DIMETIXFLS-CH30 (Швейцария);
• ГЛОНАСС/GPS навигатора, например, типа NovAtelFlexPak6 (Канада);
• отражательной призмы, например, типа LeicaGRZ122, LeicaGRZ101 (Швейцария);
• системы наведения на удаленный объект (БПЛА) по горизонтальному и вертикальному углу, определяемых на основе данных ГЛОНАСС/GPS навигаторов, установленных на дальномерном блоке и на БПЛА;
• видеокамеры для отображения процесса наведения (на другую ДС, БПЛА) на экране монитора блока управления дальномерной станцией, например, Boscam HD19;
• радиопередатчика для связи с блоком управления дальномерными станциями (ДС), например, типа BoscamBOS350 (Китай);
• трегера, например, NikonW30 (Япония), LeicaGDF311 (Швейцария).
Дальномерную станцию (ДС) устанавливают на штатив, применяемый для установки геодезических приборов. ДС предназначена для выполнения следующих операций (измерений):
a) Измерение расстояний до аналогичной ДС (по лучу, отраженному от размещенного на нем отражателя). Точность измерения 1-2 мм. Наведение ДС на аналогичную ДС осуществляется в полуавтоматическом или в ручном режиме с использованием блока управления ДС, при этом процесс наведения отображается на экране монитора блока управления ДС.
b) Измерение расстояния от ДС до отражателей, размещенных на БПЛА, осуществляется с точностью 1-2 мм. Наведение дальномера на БПЛА выполняется в автоматическом режиме по двум углам (горизонтальному и вертикальному) относительно осей точной системы координат, точность наведения (отслеживания) по каждому углу составляет от 10 до 60 угловых минут. При этом процесс наведения отображается на экране монитора блока управления ДС.
Информация об измеренных расстояниях, наведение на ДС и БПЛА при помощи радиосвязи передается на блок управления ДС. Количество ДС – не менее трех.
2. Блок управления дальномерными станциями (ДС) представляет собой устройство, состоящее из следующих элементов:
• портативной персональной электронно-вычислительной машины (ППЭВМ), например, типа Notebook, или «Планшет»;
• внешнего приемо-передающего модуля, подключаемого к ППЭВМ, например, производства фирмы «Геоскан».
• манипулятора типа «джойстик» или «мышь»;
• специального программного обеспечения, позволяющего производить следующие вычисления:
- задание точной системы координат (ТСК) на основе расстояний, измеренных между ДС;
- определение параметров перехода из ОСК в ТСК;
- определение предварительного положения (координат) БПЛА в ТСК;
- определение углов наведения (горизонтального, вертикального) каждой ДС на БПЛА;
- определение точного пространственного и углового положения БПЛА по расстояниям, измеренным от ДС до отражателей, размещенных на БПЛА.
Назначение блока управления дальномерными станциями (ДС) следующее:
a) наведение одной ДС на другую ДС, например, по схеме 1-2-3-1;
b) измерение расстояний между двумя ДС, например, между 1-2, 2- 3, 3 -1;
c) наведение ДС на БПЛА (удаленный объект);
d) измерение расстояния между ДС и БПЛА;
e) отображение, контроль на мониторе (дисплее) процесса наведения одного ДС на другое ДС, а также наведения ДС на БПЛА;
f) синхронизация/разсинхронизация работы ДС при измерении расстояний от ДС до БПЛА;
g) сбор информации:
- расстояний, измеренных ДС (до другой ДС, до БПЛА);
- координат ДС и БПЛА в общеземной системе координат (ОСК), получаемых при помощи встроенных в них ГЛОНАСС/GPS навигаторов;
h) обработка информации:
- задание точной системы координат (ТСК);
- вычисление параметров перехода из ОСК в ТСК;
- вычисление предварительного положения (координат) БПЛА в ТСК;
- вычисление углов наведения (горизонтального, вертикального) каждой ДС на БПЛА;
- вычисление точного пространственного и углового положения БПЛА по расстояниям, измеренным от ДС до отражателей, размещенных на БПЛА;
i) передача информации, а именно - углов наведения (горизонтального и вертикального) каждой ДС на БПЛА.
3. БПЛА, оснащенный отражателями. В качестве БПЛА-мультикоптер может быть использован:
1). Серийно выпускаемый БПЛА известных марок, например, «Геоскан-401» (квадрокоптер), разработанный группой компаний "Геоскан" (Россия) или Vulcan UAV BlackWidow Х8 (октоптер), разработанный AeroVironment, Inc. (США) и другие.
2). Специально разработанный БПЛА-мультикоптер для достижения целей и задач заявленного изобретения.
Количество отражателей, закрепляемых на БПЛА, должно быть не менее трех. При установке четырех отражателей обеспечиваются более простой и менее трудоёмкий процесс определения углового положения БПЛА. Расстояние между двумя отражателями (базис В) может быть изменяемым (увеличение, уменьшение) за счет конструкции крепления отражающего устройства. При этом значение базиса может быть определено с точностью до нескольких десятых долей миллиметра (не хуже 0.5 мм).
Отражатель должен обеспечивать возвратное отражение лазерного луча, т.е. отражение луча в обратном направлении (в строну ДС) при любом угле попадания на него лазерного луча, исходящего от ДС. Отражатель может быть, например, призменным, выполненным, в частности, с применением триппель призм.
С целью достижения однозначности, а именно - до какого отражателя измерено расстояние от конкретной ДС, измерение расстояния от отдельной ДС до каждого отражателя, установленного на БПЛА, осуществляется по принципу: «один отражатель доступен, остальные недоступны». Время доступности отражателя TD.
Доступность отдельного отражателя и недоступность остальных может быть, например, обеспечена механическим образом: использование принципа роторного затвора. Например, при диаметре отражателя 30 мм, диаметр ротора составит порядка 120 мм. При скорости вращения ротора 2400 оборотов в минуту время доступа TD одного отражателя составит 0.0063 сек, а время опроса четырех отражателей будет не более 0.025 сек. При увеличении скорости вращения в два раза время доступа одного отражателя и опроса 4-х отражателей уменьшится вдвое и соответственно составит: 0.0032 и 0.012 сек. Данных временных интервалов будет достаточно для многократного измерения одного и того же расстояния до отдельного отражателя.
Для выделения информации по каждой ДС – от какой ДС выполнено измерение расстояний до отражателей на БПЛА, измерения расстояний ДС выполняется по очереди: за счет введения временного сдвига ts неодновременного измерения расстояний разными ДС. Временной сдвиг может составлять не более: ts=ТD/n, где ТD – время доступа одного отражателя, n – количество ДС. Например, при n =3 и времени доступа одного отражателя 0,0063 сек временной сдвиг должен быть не более 0.002 сек.
Скорость движения БПЛА будет определяться видом решаемой задачи. Так, для формирования 3D-модели здания (сооружения) скорость БПЛА будет минимальной (3-5 км/час и менее). При съемке для создания, например, цифровой модели рельефа (ЦМР) скорость БПЛА может достигать несколько десятков километров в час (50 км/час). Смещение БПЛА в пространстве составит соответственно не более 2 мм и 30мм для tS=0.002 сек, что сравнимо с точностью определения пространственных координат для построения 3D-модели здания и ЦМР.
3. Блок управления БПЛА представляет собой устройство, состоящее из следующих элементов:
• портативной персональной электронно-вычислительной машины (ППЭВМ), например, типа Notebook, или «Планшет»;
• внешнего приемо-передающего модуля, подключаемого к ППЭВМ, например, производства фирмы «Геоскан»;
• манипулятора типа «джойстик» или «мышь»;
• специального программного обеспечения, позволяющего производить планирование полета и т.п.
Назначение блока управления БПЛА следующее:
1. Управление БПЛА во время полета, в том числе и ручном режиме.
2. Контроль положения БПЛА на соответствие полетному заданию.
3. Визуализация изображения, получаемой съемочной камерой.
В качестве блока управления БПЛА может быть использован:
1). Блок (модуль) управления для серийно выпускаемых БПЛА известных марок, например, «Геоскан-401» (квадрокоптер), разработанный группой компаний "Геоскан" (Россия) или Vulcan UAV BlackWidow Х8 (октоптер), разработанный AeroVironment, Inc. (США) и другие.
2). Специально разработанный блок управления для достижения целей и задач заявленного изобретения.
Недостатками прототипа в отношении системы по сравнению с заявленным техническим решением являются:
1. Не определены конструкционные и функциональные связи между составными элементами дальномерных станций, что приводит к невозможности осуществления совместного функционирования составных элементов дальномерных станций.
2. Не определены конструкционные и функциональные связи между блоком управления и дальномерными станциями, что приводит к невозможности осуществления совместного функционирования блока управления и дальномерных станций.
3. Не определена возможность вращения дальномерных станций вокруг вертикальной оси и горизонтальной оси в связи с отсутствием в составе дальномерных станций шаговых двигателей, что не позволяет установить, каким образом осуществляется наведение лазерного дальномера одной дальномерной станции на отражательную призму другой дальномерной станции с целью измерения расстояния между дальномерными станциями, а также каким образом осуществляется непрерывное наведение лазерного дальномера дальномерной станции на БПЛА с целью непрерывного измерения расстояния до отражателей БПЛА.
4. Наличие двух блоков управления (по сравнению с одним блоком в заявленном техническом решении), а именно - блока управления дальномерными станциями и блока управления БПЛА, что приводит к:
• снижению надежности определения пространственного и углового положения БПЛА из-за возможных помех в процессе передачи информации посредством канала радиосвязи с одного блока управления на другой, а именно - координат БПЛА, определённых в общеземной системе координат блоком управления БПЛА;
• снижению технологичности, эффективности функционирования и удобства в управлении системой за счёт бóльшего количества элементов комплекса;
• бóльшему числу специалистов, обслуживающих систему;
• бóльшему числу программ программного обеспечения, что приводит к бóльшему времени расчетов, что, в свою очередь, имеет значение при обработке результатов в реальном режиме времени.
5. Недостаточная надёжность определения углового положения БПЛА из-за невозможности непрерывного измерения базиса (расстояния) между отражателями, который (базис) постоянно изменяется вследствие его вибраций во время полёта БПЛА.
6. Бóльшие временные и трудозатраты при подготовке БПЛА к полету при целенаправленном изменении длины базиса между отражателями, так как определение длины базиса проводят с использованием мерной ленты или на калибровочном стенде при каждом целенаправленном изменении базиса ввиду отсутствия возможности автоматического измерения базиса.
Так как система, описанная в прототипе, не включена в формулу изобретения по прототипу, независимый пункт формулы заявленного изобретения составлен без ограничительной части.
Целью заявленного технического решения является разработка комплекса для определения пространственных координат удаленного объекта, расположенного на местности, с точностью, находящейся в диапазоне от 0.002 до 0.015 м (2-15 мм), в режиме реального времени и в режиме постобработки по результатам обработки изображений, полученных с БПЛА, и результатам определения пространственного (с погрешностью не хуже 1-2 мм) и углового (с погрешностью не хуже 30˝) положения БПЛА в системе координат комплекса через определение расстояний между дальномерными станциями комплекса и от дальномерных станций до БПЛА, а именно - до отражателей, размещённых на БПЛА.
Техническим результатом заявленного технического решения по сравнению с прототипом является:
1. Определение конструкционных и функциональных связей между составными элементами дальномерных станций, что приводит к возможности осуществления совместного функционирования составных элементов дальномерных станций и заявленного комплекса в целом.
2. Определение конструкционных и функциональных связей между блоком управления и дальномерными станциями, что приводит к возможности осуществления совместного функционирования блока управления и дальномерных станций и заявленного комплекса в целом.
3. Обеспечение возможности вращения функционального элемента дальномерных станций вокруг вертикальной оси и горизонтальной оси путем введения в состав дальномерных станций шаговых двигателей, что приводит к возможности осуществления наведения лазерного дальномера одной дальномерной станции на отражательную призму другой дальномерной станции с целью измерения расстояния между дальномерными станциями, а также возможности осуществления непрерывного наведения лазерного дальномера каждой дальномерной станции на БПЛА с целью непрерывного измерения расстояния до отражателей БПЛА.
4. Уменьшение количества блоков управления с двух до одного и, соответственно, устранения канала связи между ними, за счет чего достигается:
• повышение надёжности определения пространственного и углового положения БПЛА в системе координат комплекса из-за устранения возможных помех в процессе передачи информации посредством канала радиосвязи с одного блока управления на другой;
• повышение технологичности, эффективности функционирования заявленного комплекса и удобства в управлении комплексом за счёт уменьшения количества элементов комплекса;
• уменьшение числа специалистов, обслуживающих комплекс, за счет уменьшения элементов комплекса;
• уменьшение числа программ программного обеспечения, что, в свою очередь, приводит к уменьшению времени расчетов, что имеет значение при обработке результатов в реальном режиме времени.
3. Повышение надежности определения пространственного и углового положения БПЛА в системе координат комплекса за счет непрерывного измерения базиса (расстояния) между парой противоположных отражателей, путем введения в состав модуля отражателей лазерного дальномера и мини-призмы на каждый базис с возможностью их смещения перпендикулярно базису с целью обеспечения прямой видимости между ними.
4. Снижение временных и трудозатрат при подготовке БПЛА к полету при целенаправленном изменении длины базиса между отражателями за счет автоматического измерения длины базиса с помощью лазерного дальномера и мини-призмы, при этом калибровочный стенд используют однократно при контрольном измерении длины базиса.
Сущностью заявленного технического решения является комплекс для определения пространственных координат удаленного объекта, расположенного на местности, состоящий из:
не менее чем пяти отдельных элементов, включая не менее чем три дальномерные станции, беспилотный летательный аппарат, оснащенный модулем отражателей, блок управления комплексом;
при этом дальномерная станция содержит неподвижное основание, к которому крепится функциональный элемент дальномерной станции,
при этом неподвижное основание представляет собой платформу, к которой крепится адаптер трегера, при помощи которого дальномерная станция фиксируется в трегере, установленном на геодезическом штативе;
при этом функциональный элемент дальномерной станции состоит из неподвижной платформы, к которой крепится отражательная призма,
и вращающейся части, которая состоит из следующих элементов, прикрепленных к корпусу вращающейся части:
– приёмно-передающего устройства с антенной, с возможностью двухсторонней связи с блоком управления комплексом, а именно - возможности передачи на блок управления комплексом измеренной информации - расстояний до другой дальномерной станции, расстояний от дальномерной станции до отражателей, установленных на беспилотный летательный аппарат, ГЛОНАСС/GPS-измерений положения дальномерной станции в общеземной системе координат, а также возможности приёма от блока управления комплексом информации для управления дальномерной станцией в автоматическом и ручном режимах - наведение на другую дальномерную станцию и измерения до неё расстояния, наведение на беспилотный летательный аппарат и измерение расстояний до отражателей, установленных на беспилотном летательном аппарате;
– лазерного дальномера, с возможностью измерения расстояния до отражателя другой дальномерной станции, а также до отражателей, установленных на беспилотном летательном аппарате, и далее с возможностью обеспечения передачи измеренных лазерным дальномером расстояний посредством приёмно-передающего устройства с антенной в блок управления комплексом;
– ГЛОНАСС/GPS-навигатора с приёмной антенной с возможностью определения координат дальномерной станции в известной общеземной системе координат, и далее с возможностью обеспечения передачи измеренных координат дальномерной станции посредством приёмно-передающего устройства в блок управления комплексом;
– цифровой видеокамеры с возможностью передачи изображения посредством приёмно-передающего устройства с антенной в блок управления комплексом, и возможностью отображения процесса наведения на другую дальномерную станцию и на беспилотный летательный аппарат на экране монитора блока управления комплексом, а также с возможностью определения направления на беспилотный летательный аппарат по измерениям координат изображения беспилотного летательного аппарата, опознанного в автоматическом режиме на изображении цифровой видеокамеры;
– двух шаговых двигателей с драйверами с возможностью обеспечения вращения функционального элемента дальномерной станции вокруг вертикальной оси и горизонтальной оси и далее с возможностью обеспечения наведения лазерного дальномера на отражательную призму другой дальномерной станции, а также на отражатели беспилотного летательного аппарата по горизонтальному и вертикальному углу в системе координат комплекса, определяемых на основе данных ГЛОНАСС/GPS-навигаторов, установленных на дальномерных станциях и беспилотном летательном аппарате;
– блока питания;
причем элементы вращающейся части функционального элемента дальномерной станции соединены между собой кабельными соединениями;
при этом беспилотный летательный аппарат оснащен цифровой камерой или лазерным сканером, и модулем отражателей, содержащем четное количество отражателей для отражения лазерного излучения от дальномерных станций, но не менее четырех отражателей;
при этом модуль отражателей содержит:
- раму модуля отражателей, которая крепится к беспилотному летательному аппарату с помощью стоек крепления;
- устройства с отражателями, которые крепятся на телескопических штангах, расположенных в двух взаимно перпендикулярных направлениях парами и прикрепленных в свою очередь к раме модуля отражателей; причем отражатели в устройстве с отражателями крепятся к плоской стороне неподвижной круглой платформы, которая в свою очередь с помощью своей цилиндрической оси с резьбой плоской гайкой и плоской шайбой крепится к цилиндру, который в свою очередь крепится к телескопической штанге; причем на ось неподвижной круглой платформы предварительно крепятся подшипники и вращающаяся круглая платформа с полой осью, на торце которой закреплена шестерня, а к боковой поверхности вращающейся платформы прикреплён цилиндр со щелью в нижнем основании и в образующей указанного цилиндра, с возможностью вращения круглой платформы с полой осью с прикреплённым к ней цилиндром вокруг оси неподвижной платформы, причем вращение обеспечивают с помощью электрического двигателя и редуктора, прикреплённых к внутренней поверхности верхнего основания цилиндра;
- лазерные дальномеры и мини-призмы, которые крепятся попарно над отражателями на паре противоположных устройств с отражателями с возможностью определения базиса между отражателями; между лазерным дальномером и мини-призмой обеспечивается прямая видимость путем возможности смещения лазерного дальномера и мини-призмы в направлении, перпендикулярному базису, на котором они расположены, за счет обеспечения возможности их смещения вбок по перпендикулярным направляющим, расположенным на верхней части устройств с отражателями;
- контроллер модуля отражателей и блок питания модуля отражателей, которые крепятся к раме модуля отражателей;
при этом блок управления комплексом содержит компьютер с подсоединенным к нему многоканальным радиомодемом с антенной с возможностью приема информации от дальномерных станций и передачи информации к дальномерным станциям, а также с возможностью приема информации от беспилотного летательного аппарата и передачи информации к беспилотному летательному аппарату; при этом компьютер оснащен программным обеспечением с возможностью планирования и управления полётом беспилотного летательного аппарата, в том числе в ручном режиме, а также программным обеспечением, состоящим из семи вычислительных программ, с возможностью управления дальномерными станциями. Комплекс по п.1, отличающийся тем, что функциональный элемент дальномерной станции крепится к неподвижному основанию при помощи штанг.
Заявленное техническое решение иллюстрируется Фиг.1 – Фиг.10:
На Фиг. 1 – изображен общий вид измерительной системы в целом (L1, L2, L3 - расстояния между дальномерными станциями; l1 , l2 , l3 – расстояния от дальномерных станций до БПЛА; XYZ - система координат комплекса).
На Фиг. 2 – изображен общий вид дальномерной станции.
На Фиг. 3 – изображен вид дальномерной станции в разрезе.
На Фиг.4 – изображен принцип размещения отражателей на БПЛА (D – расстояние (базис) между отражателями).
На Фиг.5 – изображено размещение модуля отражателей на БПЛА (D – расстояние (базис) между отражателями).
На Фиг.6 – изображен модуль отражателей.
На Фиг.7 – изображена схема взаимодействия элементов дальномерной станции.
На Фиг.8 – изображена схема взаимодействия вычислительных программ блока управления комплексом.
На Фиг.9 – изображена схема калибровочного стенда, предназначенного для определения длины базиса между отражателями БПЛА (L4, L5, L6 расстояния, измеряемые электронным тахеометром; α1, α2 - горизонтальные углы, ν1, ν2 – вертикальные углы, измеряемые электронными тахеометрами до отражателей БПЛА; XYZ – пространственная система координат калибровочного стенда; D - расстояние (базис) между двумя отражателями).
На Фиг.10 – изображена схема устройства с отражателями БПЛА, реализующего доступность и недоступность отражателей.
Позиции на Фиг.1 – Фиг.10 обозначают:
1, 2, 3 – дальномерные станции, устанавливаемые на геодезические штативы;
4 – БПЛА с модулем отражателей;
5 – блок управления комплексом;
6 – лазерный дальномер дальномерной станции;
7 – цифровая видеокамера дальномерной станции;
8 – антенна ГЛОНАСС/GPS-навигатора;
9 – отражательная призма дальномерной станции;
10 – антенна приёмно-передающего устройства;
11 – основание дальномерной станции;
12 – штанги крепления функционального (верхнего) элемента дальномерной станции;
13 – неподвижная платформа (основание) функционального элемента дальномерной станции;
14 – вращающаяся часть функционального элемента дальномерной стации;
15 – адаптер (переходник) для крепления в трегере;
16 – вертикальная ось вращения дальномерной станции;
17 – горизонтальная ось вращения дальномерной станции;
18 – ГЛОНАСС/GPS–навигатор;
19 – приёмно-передающее устройство;
20 – шаговый двигатель;
21 – драйвер (блок управления) шаговыми двигателями;
22 – блок питания (аккумуляторная батарея);
23/1, 23/2, 23/3, 23/4 – устройства с отражателями БПЛА;
24 – корпус БПЛА;
25 – цифровая камера БПЛА или лазерный сканер БПЛА;
26 – посадочные стойки БПЛА;
27 – контроллер модуля отражателей;
28 – блок питания (аккумуляторная батарея) модуля отражателей;
29/1, 29/2, 29/3, 29/4 – штанги (телескопические) крепления отражателей;
30 – рама модуля отражателей, к которой крепятся телескопические штанги с устройствами с отражателями БПЛА, контроллер, блок питания;
31/1, 31/2 – лазерные дальномеры для измерения длины базиса;
32/1, 32/2 – отражательные мини-призмы для измерения длины базиса;
33 – стойки крепления рамы модуля отражателей к БПЛА;
34/1, 34/2 – электронные тахеометры;
35 – платформа для установки БПЛА с отражателями;
36/1, 36/2, 36/3, 36/4 – направляющие для сдвига лазерных дальномеров, мини-призм;
37 – круглая платформа, имеющая с противоположной стороны цилиндрическую ось с резьбой;
38 – круглая вращающаяся платформа с полой осью;
39 – цилиндр с отверстием в основании;
40 – шестерня (зубчатое колесо);
41 – подшипник;
42 – плоская шайба;
43 – гайка плоская;
44 – электрический двигатель;
45 – редуктор с шестернёй;
46 – цилиндр со щелью в нижнем основании и в образующей цилиндра;
47/1, 47/2, 47/3, 47/4 – отражатели БПЛА.
Далее заявителем приведено описание заявленного комплекса.
Заявленный комплекс в целом включает наземные измерительные элементы и элементы, закрепленные на БПЛА. Комплекс состоит не менее чем из пяти отдельных элементов, включая не менее трех дальномерных станций, а именно (см. Фиг.1):
1. Дальномерных станций (ДС), устанавливаемых на геодезические штативы, в количестве не менее трёх штук, пространственно расположенных на некотором удалении друг от друга и от БПЛА, в пределах прямой видимости между ДС и от ДС до БПЛА.
2. БПЛА, оснащенного цифровой камерой или лазерным сканером, и модулем отражателей, содержащего (модуль) четное количество отражателей, но не менее четырех.
3. Блока управления комплексом (далее по тексту БУК), осуществляющим управление дальномерными станциями и БПЛА.
Далее заявителем приведено описание элементов комплекса и связей между ними.
1. Дальномерная станция (см. Фиг.1, Фиг.2, Фиг.3).
Дальномерные станции 1, 2, 3 являются аналогичными между собой устройствами, поэтому далее заявителем приведено описание одной дальномерной станции без указания ее позиции, при этом данное описание равнозначно относится ко всем дальномерным станциям. Количество дальномерных станций по заявленному техническому решению должно быть не менее трех, при этом все они будут представлять собой аналогичные устройства, приведенные ниже.
Дальномерная станция представляет собой устройство, состоящее из (Фиг.2, Фиг.3):
• неподвижного основания 11, к которому крепится адаптер трегера, при помощи которого дальномерная станция фиксируется в трегере, установленном на геодезическом штативе;
• функционального элемента.
Функциональный элемент состоит из:
– неподвижной платформы 13 с отражательной призмой 9;
– вращающейся части 14.
Вращающаяся часть 14 состоит из:
- приёмно-передающего устройства 19 с антенной10;
- лазерного дальномера 6;
- ГЛОНАСС/GPS-навигатора 18 с антенной 8;
- цифровой видеокамеры 7;
- двух шаговых двигателей 20;
- драйвера шаговых двигателей 21;
- блока (источника) питания 22.
Далее заявителем приведено подробное описание составных элементов дальномерной станции и их (составных элементов) связей между собой (Фиг.2, Фиг.3).
Дальномерная станция представляет собой устройство, состоящее из неподвижного основания 11, к которому, например, при помощи штанг 12, крепится функциональный элемент дальномерной станции.
Неподвижное основание 11 представляет собой платформу, выполненную, например, из легкого металлического сплава. К неподвижному основанию 11 дальномерной станции крепится известным образом, например, с помощью резьбового соединения, адаптер (переходник для крепления в трегере) 15 трегера (на Фиг. не указан), например, адаптер АL-1, AL-3 (Leica), при помощи которого дальномерная станция известным образом, например, с помощью зажимного устройства, фиксируется в трегере, установленном на геодезическом штативе (на Фиг. не указан). Трегер на штативе крепится, например, с помощью винтового соединения.
Функциональный элемент дальномерной станции состоит из:
– неподвижной платформы 13, выполненной, например, из легкого металлического сплава, к которой крепится, например, с помощью резьбового соединения, отражательная призма 9, например, призма типа Leica GRZ122, Leica GRZ101 (Швейцария),
– вращающейся части 14.
Вращающаяся часть 14 состоит из следующих элементов, прикрепленных к её корпусу (на Фиг.не указан):
• Приёмно-передающего устройства 19 с антенной 10, например, типа Boscam BOS350 (Китай), который предназначен для двухсторонней связи с блоком управления комплексом 5 (Фиг.1) с целью:
- передачи на БУК 5 измеренной информации, например, расстояний до другой ДС, расстояний от ДС до отражателей, установленных на БПЛА, ГЛОНАСС/GPS-измерений положения ДС в общеземной системе координат;
- приёма от БУК 5 информации для управления дальномерной станцией в автоматическом и ручном режимах, а именно - наведение на другую ДС и измерения до неё расстояния, наведение на БПЛА и измерение расстояний до отражателей, установленных на БПЛА.
• Лазерного дальномера 6, например, DIMETIXFLSC10, DIMETIXFLS-CH30 (Швейцария), который предназначен для измерения расстояния до отражательной призмы 9 другой дальномерной станции при наведении на эту дальномерную станцию, а также до отражателей 47/1, 47/2, 47/3, 47/4 (Фиг.4), установленных на БПЛА, при наведении дальномера на БПЛА. Измеренные лазерным дальномером расстояния посредством приёмно-передающего устройства 19 с антенной 10 передаются в БУК.
• ГЛОНАСС/GPS-навигатора 18 с приёмной антенной 8, например, типа NovAtel FlexPak6 (Канада), который предназначен для определения координат дальномерной станции в известной общеземной системе координат (WGS-84 или ПЗ-90.11). Измеренные координаты ДС посредством приёмно-передающего устройства 19 передаются в блок управления комплексом 5.
• Цифровой видеокамеры 7, например, Boscam HD19, которая предназначена для передачи изображения посредством приёмно-передающего устройства 19 с антенной 10 в БУК 5, для отображения процесса наведения (на другую ДС, на БПЛА) на экране монитора БУК 5, а также для определения направления на БПЛА по измерениям координат изображения БПЛА, опознанного в автоматическом режиме на изображении цифровой видеокамеры 7.
• Двух шаговых двигателей 20, например, FL57ST51-0426A с драйверами 21 для шагового двигателя, например, SMDDIN.16-28.001ПС, которые (шаговые двигатели) предназначены для вращения функционального элемента дальномерной станции вокруг вертикальной оси 16 и горизонтальной оси 17 с целью наведения лазерного дальномера 6 на отражательную призму 9 другой дальномерной станции, а также на отражатели 47/1, 47/2, 47/3, 47/4 БПЛА по горизонтальному и вертикальному углу в системе координат комплекса, которые определяются на основе данных ГЛОНАСС/GPS-навигаторов 18, установленных на дальномерных станциях, и ГЛОНАСС/GPS-навигаторов БПЛА (на Фиг. не указаны). Информация для наведения одной ДС на другую ДС и наведения ДС на БПЛА посредством приёмно-передающего устройства 19 с антенной 10 принимается с блока управления комплексом 5 и транслируется в драйверы 21 шаговых двигателей 20 для их вращения на рассчитанные углы.
• Блока (источника) питания 22, например, MDR-60-12MW.
Заявитель поясняет, что элементы вращающейся части функционального элемента дальномерной станции соединены между собой, например, с помощью кабельных соединений и крепятся к корпусу (на Фиг. не указан) вращающейся части 14, например, с помощью резьбовых соединений.
Дальномерную станцию устанавливают на штатив (на Фиг. не указан), применяемый для установки геодезических приборов, например, на штатив Leica GST101 (Швейцария), при помощи трегера с адаптером, например, трегера NikonW30 (Япония), Leica GDF311 (Швейцария) (на Фиг. не указан). Трегер крепится на штатив известным образом, например, с помощью винтового соединения.
Дальномерная станция предназначена для выполнения следующих измерений (см. Фиг. 1):
- измерение расстояний до аналогичной ДС по лучу, отраженному от размещенной на ДС отражательной призмы 9. Точность измерения расстояния между двумя ДС составляет 1-2 мм. Наведение одной ДС на другую, аналогичную ДС, осуществляется в полуавтоматическом или в ручном режиме с использованием БУК 5, при этом процесс наведения отображается на экране монитора БУК 5;
- измерение расстояния от ДС до отражателей 47/1, 47/2, 47/3, 47/4, размещенных на БПЛА, осуществляется с точностью 1-2 мм. Наведение ДС на БПЛА выполняется в автоматическом режиме по двум углам (горизонтальному и вертикальному) относительно осей пространственной системы координат заявленного комплекса, точность наведения (отслеживания) по каждому углу составляет от 10 до 60 угловых минут. При этом процесс наведения отображается на экране монитора БУК 5.
Информация об измеренных расстояниях, а именно, расстояниях между ДС и от ДС до БПЛА, а также видеоизображение процесса наведения одной ДС на другую ДС и наведение ДС на БПЛА, формируемых цифровой видеокамерой 7, при помощи приёмно-передающего устройства 19 с антенной 10 каждой ДС передается на БУК 5. Количество ДС – не менее трех.
Таким образом, из приведенного выше описания дальномерных станций можно сделать вывод, что заявителем определены конструкционные и функциональные связи между составными элементами дальномерных станций, что приводит к возможности осуществления совместного функционирования составных элементов дальномерных станций и заявленного комплекса в целом.
Кроме этого, обеспечена возможность вращения функционального элемента дальномерной станции вокруг вертикальной оси и горизонтальной оси путем введения в состав каждой дальномерной станции шаговых двигателей, что привело к возможности осуществления наведения лазерного дальномера дальномерной станции на отражательную призму другой дальномерной станции с целью измерения расстояния между дальномерными станциями, а также возможности осуществления непрерывного наведения лазерного дальномера дальномерной станции на БПЛА с целью непрерывного измерения расстояния до отражателей БПЛА.
Приведенное выше подтверждает достижение заявленного технического результата.
2. БПЛА, оснащенный цифровой камерой или лазерным сканером, и модулем отражателей.
В качестве БПЛА 4 (Фиг.1) могут быть использованы, например:
– специально разработанный БПЛА-мультикоптер для достижения целей и задач заявленного изобретения.
– серийно выпускаемый БПЛА известных марок, например, «Геоскан-401» (квадрокоптер), разработанный группой компаний "Геоскан" (Россия) или Vulcan UAV BlackWidow Х8 (октоптер), разработанный AeroVironment, Inc. (США) и другие.
К корпусу 24 БПЛА прикреплены, например, в помощью сварного соединения, посадочные стойки 26 (Фиг.5).
БПЛА оснащен цифровой камерой или лазерным сканером (общая позиция 25 на Фиг.5). Цифровая камера крепится к БПЛА с использованием, например, стабилизированного подвеса (https://www.geoscan.aero/ru/products/geoscan401/geo). Лазерный сканер крепится к БПЛА с использованием, например, подвеса и резьбовых соединений (https://art-geo.ru/catalog/airscanner_bpla/).
На БПЛА 4 с цифровой камерой или лазерным сканером 25 устанавливается модуль отражателей (Фиг. 5), содержащий четное количество отражателей для отражения лазерного излучения от дальномерных станций, но не менее четырех отражателей (Фиг. 5, Фиг.6). Четное количество отражателей необходимо для размещения на паре отражателей лазерного дальномера и мини-призмы для автоматического измерения базиса между отражателями. При этом одной пары (двух отражателей) недостаточно для определения углового положения БПЛА ввиду недостаточности информации, таким образом, минимальное количество отражателей – две пары (четыре отражателя).
Модуль отражателей (Фиг.6) состоит из:
• рамы 30 модуля отражателей;
• стоек крепления 33 рамы модуля отражателей к БПЛА;
• устройств с отражателями 23 (Фиг.10), каждое из которых состоит из:
- отражателя 47,
- круглой платформы 37, имеющей с противоположной стороны цилиндрическую ось с резьбой,
- круглой вращающейся платформы 38 с полой осью,
- цилиндра 39 с отверстием в основании,
- шестерни (зубчатое колесо) 40,
- подшипника 41,- плоской шайбы 42,
- плоской гайки 43,
- электрического двигателя 44,
- редуктора с шестернёй 45,
- цилиндра 46 со щелью в нижнем основании и в образующей цилиндра;
• телескопических штанг 29 крепления устройств с отражателями;
• лазерных дальномеров 31 для измерения длины базиса;
• отражательных мини-призм 32 для измерения длины базиса;
• контроллера 27 модуля отражателей;
• блока питания (аккумуляторная батарея) 28 модуля отражателей.
Далее заявителем приведено более подробное описание модуля отражателей.
Рама 30 модуля отражателей крепится к БПЛА с помощью стоек крепления 33, к раме 30 крепятся телескопические штанги 29 с устройствами с отражателями 23, контроллер 27, блок питания 28.
Устройства с отражателями, например, четыре устройства - 23/1, 23/2, 23/3, 23/4 с четырьмя отражателями 47/1, 47/2, 47/3, 47/4 (Фиг.4, Фиг.5, Фиг. 10), которые крепятся на телескопических штангах 29/1, 29/2, 29/3, 29/4, например, с помощью резьбового или обжимного соединения.
Телескопические штанги 29/1, 29/2, 29/3, 29/4 расположены в двух взаимно перпендикулярных направлениях парами, и крепятся, например, сварными соединениями к раме 30.
Далее модуль отражателей, например, при помощи резьбовых соединений с использованием стоек крепления 33 рамы модуля отражателей крепится к БПЛА.
Отражатели 47/1, 47/2, 47/3, 47/4 при помощи, например, резьбового соединения крепятся к плоской стороне неподвижной круглой платформы 37, выполненной, например, из лёгкого композитного материала, которая (платформа) с помощью своей цилиндрической оси с резьбой плоской гайкой 43 и плоской шайбой 42 крепится к цилиндру 39, который выполнен, например, из лёгкого композитного материала и крепится (цилиндр) к телескопической штанге, например, с помощью резьбового или обжимного соединения.
Предварительно на ось неподвижной круглой платформы 37 крепятся:
- подшипники 41;
- вращающаяся круглая платформа 38 с полой осью, выполненная (платформа с полой осью), например, из лёгкого композитного материала, на торце которой (полой оси) при помощи резьбового соединения закреплена шестерня 40, а к боковой поверхности платформы 38, например, при помощи резьбовых соединений, прикреплён цилиндр 46, выполненный, например, из лёгкого композитного материала, со щелью в нижнем основании и в образующей указанного цилиндра 46. Вращение круглой платформы 38 с полой осью с прикреплённым к ней цилиндром 46 выполняется вокруг оси неподвижной платформы 37 с помощью электрического двигателя 44 и редуктора 45, прикреплённых, например, с помощью резьбовых соединений к внутренней поверхности верхнего основания цилиндра 39.
Вращение круглой платформы 38 с полой осью и прикреплённого к нему цилиндра 46 со щелью в нижнем основании и в образующей цилиндра позволяет реализовать доступность/недоступность отражателей 47/1, 47/2, 47/3, 47/4 в процессе измерения расстояния от ДС1, ДС2, ДС3 до отражателей 47/1, 47/2, 47/3, 47/4. Управление выполняется контроллером 27 модуля отражателей.
Лазерные дальномеры 31/1, 31/2 и мини-призмы 32/1, 32/2 располагаются попарно над отражателями 47/1, 47/2, 47/3, 47/4. Лазерные дальномеры и мини-призмы крепятся к внешней поверхности верхнего основания цилиндра 39 при помощи, например, резьбовых соединений.
Расстояние между парой отражателей, расположенных на телескопических штангах, называют базисом. Отражатели обеспечивают возвратное отражение лазерного луча, т.е. отражение луча в обратном направлении (в сторону ДС) при любом угле попадания на него лазерного луча, исходящего от ДС. Отражатели могут быть, например, призменными (GEOBOX PRISM 360M), выполненными, например, с применением триппель призм. С помощью телескопических штанг возможно изменение расстояния между двумя отражателями с целью уменьшения или увеличения базиса. Телескопические штанги крепятся к раме 30 (см. Фиг 5), например, сварным соединением.
• Два лазерных дальномера 31/1, 31/2 и две мини-призмы 32/1, 32/2, например, Leica GMP111, предназначены для определения базиса (расстояния) между отражателями 47/1, 47/2, 47/3, 47/4. Лазерные дальномеры 31/1, 31/2 и мини-призмы 32/1, 32/2 располагаются на противоположных концах базиса над отражателями 47/1, 47/2, 47/3, 47/4, используемыми для отражения лазерного излучения от ДС1, ДС2, ДС3 (Фиг.1, Фиг.4, Фиг.5, Фиг.6). Лазерные дальномеры и мини-призмы закреплены парами «лазерный дальномер – мини-призма» на паре противоположных устройств с отражателями, например, резьбовыми соединениями. Мини-призмы 32/1, 32/2 обеспечивают возвратное отражение лазерного луча в направлении дальномеров 31/1, 31/2. Между лазерным дальномером и мини-призмой, например, между парой 31/1 – 32/1 или парой 31/2 – 32/2, обеспечивается прямая видимость, с этой целью предусматривается возможность смещения лазерного дальномера и мини-призмы в направлении, перпендикулярному базису, на котором они расположены. Смещение происходит за счет возможности смещения вбок по перпендикулярной направляющей 36/1, 36/2, 36/3, 36/4 (Фиг.6), расположенной на верхней части устройств с отражателями 47/1, 47/2, 47/3, 47/4.
Определение длины базиса выполняется непрерывно во время полета БПЛА со съемочной аппаратурой в виде или цифровой камеры, или лазерного сканера (на Фиг. общая позиция 25):
- с заданным интервалом времени, например, равному интервалу времени между моментами фотографированиям при использовании в качестве съемочной аппаратуры цифровой камеры БПЛА;
- с заданным интервалом времени, задаваемым произвольно, например, 10 мсек, при использовании в качестве съемочной аппаратуры лазерного сканера.
Значение длины базиса определяется по формуле:
В = Влд + Δ, (1)
где Влд – значение длины каждого базиса, измеренная лазерным дальномером 31 и мини-призмой 32, Δ - поправка, соответствующая лазерному дальномеру 31 и мини-призме 32 данного базиса. Поправка Δ – это постоянная величина для каждого базиса и вычисляется по формуле:
Δ = ВК - Влд, (2)
где:
Влд - длина базиса, измеренная лазерным дальномером 31 и мини-призмой 32,
ВК - контрольное значение длины базиса, полученное выполнением контрольных измерений.
Контрольные измерения длины базиса выполняются, например:
– методом пространственной линейно-угловой засечки, известным в геодезии, с использованием калибровочного стенда (см. Фиг. 9), пространственной системы координат калибровочного стенда, состоящего из двух электронных тахеометров 34/1, 34/2 и платформы 35, на которую устанавливается БПЛА 4 с использованием посадочных стоек 26 БПЛА (см. Фиг.5), при этом значение длины базиса (ВК) вычисляется с использованием программного обеспечения электронного тахеометра, точность определения длины базиса составляет доли миллиметра (не более 0.5 мм);
– методом непосредственных линейных измерений с использованием измерительной ленты (рулетки).
Контроллеры 27 модуля отражателей и блок питания 28 модуля отражателей (Фиг.5, Фиг.6).
Контроллер 27 и блок питания 28 крепятся к раме 30 (Фиг.5, Фиг.6), например, при помощи резьбового соединения.
Назначение контроллера 27 модуля отражателей состоит в следующем:
- управление измерением длины базиса между отражателями;
- управление отражателями по принципу «один отражатель доступен, остальные недоступны», позволяющего однозначно устанавливать, до какого отражателя БПЛА измерено расстояние от конкретной ДС.
Интервал времени доступа (то есть времени доступности отражателя, в течение которого измеряется расстояние до отражателя) (далее – ТD) до одного отражателя составляет несколько миллисекунд, а именно, 3-6 мс. Данного временного интервала достаточно для многократного измерения одного расстояния до отдельного отражателя.
Заявитель поясняет, что контроллер 27, блок питания 28, лазерные дальномеры 31/1, 31/2 и электродвигатели 44 соединены между собой, например, с помощью кабельных соединений.
Из приведенного выше описания БПЛА можно сделать вывод, что заявителем достигнут заявленный технический результат, а именно:
- повышена надежность определения пространственного и углового положения БПЛА в системе координат комплекса за счет непрерывного измерения базиса (расстояния) между парой противоположных отражателей, за счет введения в состав модуля отражателей заявленного комплекса лазерного дальномера и мини-призмы на каждый базис с возможностью их смещения перпендикулярно базису с целью обеспечения прямой видимости между ними;
- снижены временные и трудозатраты при подготовке БПЛА к полету при целенаправленном изменении длины базиса между отражателями за счет автоматического измерения длины базиса с помощью дальномера и мини-призмы, при этом калибровочный стенд используют однократно при контрольном измерении длины базиса.
3. Блок управления комплексом (БУК) 5 (Фиг.1).
Блок управления 5 заявленным комплексом предназначен для управления дальномерными станциями и БПЛА с цифровой камерой или лазерным сканером, а также с отражателями.
БУК представляет собой компьютер, например, типа Notebook, с подсоединенным к нему стандартным образом, например, с помощью USB-порта, многоканальным радиомодемом (на Фиг. не указан), например, радиомодемом AS66-DTU20 с антенной TX170-JKA011, который (многоканальный радиомодем с антенной) предназначен для приема информации от дальномерных станций и передачи информации к дальномерным станциям, а также с возможностью приема информации от беспилотного летательного аппарата и передачи информации к беспилотному летательному аппарату.
Компьютер оснащен программным обеспечением, позволяющим выполнять:
• планирование и управление полётом БПЛА, в том числе в ручном режиме;
• управление дальномерными станциями.
Планирование и управление полётом БПЛА выполняется с помощью штатного программного обеспечения для БПЛА (например, для БПЛА-квадрокоптер Геоскан-401), который (БПЛА) применяется в качестве носителя модуля отражателей 47/1, 47/2, 47/3, 47/4 и цифровой камеры или лазерного сканера 25 БПЛА.
С помощью штатного программного обеспечения также осуществляется контроль положения БПЛА на соответствие полетному заданию.
Управление дальномерными станциями (в полуавтоматическом или автоматическом режимах) реализуется посредством применения программного комплекса, состоящего из 7-ми вычислительных программ. Все программы основаны на использовании общеизвестных методов и вычислительных алгоритмов, которые широко применяются в программном обеспечении современного геодезического оборудования (электронные тахеометры, GPS/ГЛОНАСС–навигаторы), программном обеспечении для обработки геодезических измерений, программном обеспечении для обработки цифровых изображений, например PHOTOMOD (Россия), AgiSoft PhotoScan (Россия) и др.
Программное обеспечение заявленного комплекса позволяет производить следующие действия:
– вычисление параметров для наведения одной дальномерной стации на другую;
– вычисление параметров для задания системы координат комплекса (СКК);
– вычисление параметров перехода (трансформации) из общеземной системы координат в систему координат комплекса;
– вычисление параметров для наведения ДС на БПЛА по изображениям БПЛА, сформированным видеокамерой дальномерной станции;
– вычисление параметров для наведения дальномерных станций на беспилотный летательный аппарат;
– вычисление пространственного и углового положения беспилотного летательного аппарата в системе координат комплекса;
– формирование кодов – преобразование параметров, вычисленных Программами 1, 5 в цифровые сигналы (коды) для последующей их передачи на ДС с помощью радиомодема блока управления.
В результате с использованием указанного программного обеспечения производят следующие действия:
• наведение одной ДС на другую ДС, например, по схеме ДС1 - ДС2 - ДС3 - ДС1 и отображение на мониторе БУК;
• измерение расстояний между двумя ДС, например, между ДС1 - ДС2; между ДС2 - ДС3; между ДС3 - ДС1 и отображение на мониторе БУК;
• наведение ДС на БПЛА и отображение на мониторе БУК;
• измерение расстояния между ДС и отражателями БПЛА и отображение на мониторе БУК;
• синхронизация/разсинхронизация работы ДС при измерении расстояний от ДС до БПЛА;
• сбор информации:
- расстояний, измеренных ДС (до другой ДС, до БПЛА);
- координат ДС и БПЛА в общеземной системе координат (ОСК), получаемых при помощи встроенных в них ГЛОНАСС/GPS навигаторов;
• обработка информации:
- задание системы координат комплекса (СКК);
- вычисление параметров перехода из ОСК в СКК;
- вычисление предварительного положения (координат) БПЛА в СКК;
- вычисление углов наведения (горизонтального, вертикального) каждой ДС на БПЛА;
- вычисление точного пространственного и углового положения БПЛА по расстояниям, измеренным от ДС до отражателей, размещенных на БПЛА;
• передача информации, а именно - углов наведения (горизонтального и вертикального) каждой ДС на БПЛА.
Далее заявителем приведены подробные сведения о вычислительных программах программного комплекса:
Программа 1. Программа выполняет вычисление параметров для наведения одной дальномерной стации на другую. Вычисление направления, а именно двух углов (горизонтального и вертикального), для предварительного наведения одной ДС на другую ДС выполняется по координатам дальномерных станций в топоцентрической системе координат, которые вычисляются общеизвестным в высшей геодезии способом, по координатам ДС, определёнными GPS/ГЛОНАСС навигатором дальномерной станции в общеземной системе координат.
При этом начало топоцентрической системы координат помещается в одну из ДС, а именно в геометрический центр отражательной призмы ДС.
Примеры таковых алгоритмов, в частности, приводятся:
1. Огородова Л.В. Методические указания, контрольная работа №1 по курсу высшая геодезия и основы координатно-временных систем. – М.: Издательство МИИГАиК, 2016. 36 с., см.параграф 3.1, стр.12-14.
http://www.miigaik.ru/upload/medialibrary/496/4966eeed5ac9e8b0f4db9bae5a326e19.pdf.
2. Онлайн калькулятор. Направляющие косинусы. https://0oq.ru/reshebnik-onlajn/ru.onlinemschool.com/math/assistance/vector/cos/default.htm.
Программа 2. Программа выполняет вычисление параметров для задания системы координат комплекса (СКК). Выполняется вычисление: значений координат дальномерных станций в СКК; ошибок, с которыми определены координаты ДС в СКК. Координаты первой дальномерной станции – начало СКК, имеют нулевые значения (Х=Y=Z=0). Координата Х второй ДС равна расстоянию между первой и второй станциями, координаты Y и Z второй дальномерной станции равны нулю (Y=Z=0), координаты Х и Y третьей станции вычисляются общеизвестным способом линейной засечки по расстояниям, измеренным между второй и третьей станциями и между третьей и первой станциями, координата Z третьей дальномерной станции равна нулю (Z=0).
Вычисление координат Х и Y третьей дальномерной станции выполняется по расстояниям, измеренным между ДС, с использованием общеизвестного метода линейной засечки на плоскости, вычислительного алгоритма и формул, применяемых в геодезии. Вычисление ошибок координат выполняется с использованием общеизвестных методов и алгоритмов, например, метода наименьших квадратов.
Пример - линейная засечка: https://studfiles.net/preview/2096883/page:15/;
https://helpiks.org/4-108920.html .
Программа 3. Программа выполняет вычисление параметров перехода (трансформации) из общеземной системы координат в систему координат комплекса.
Вычисление параметров выполняется с использованием общеизвестных методов и вычислительных алгоритмов, применяемых в геодезии.
Примеры таковых алгоритмов, в частности, приводятся:
1. Безменов В.М. Теоретические основы преобразования пространственных геоцентрических систем координат. Методические указания. Казанский государственный университет. 28.с.
https://shelly.kpfu.ru/e-ksu/docs/F441125048/Teoreticheskie.osnovy.preobrazovaniya..sistem.koordinat.pdf;
2. ГОСТ 32453-2013 Глобальная навигационная спутниковая система.
Системы координат. Методы преобразований координат определяемых точек (с Поправкой), см. параграф 2.24 стр.3, параграф 5.2, стр-5-6.
https://meganorm.ru/Data2/1/4293771/4293771045.pdf.
Программа 4. Программа выполняет вычисление параметров для наведения ДС на БПЛА по изображениям БПЛА, сформированным видеокамерой дальномерной станции. Вычисление направления, именно двух углов, с ДС на БПЛА выполняется с использованием: значений измеренных координат БПЛА на изображении, сформированным видеокамерой ДС; пространственных координат ДС; значений углов внешнего ориентирования видеокамеры ДС, а именно углов разворота ДС вокруг вертикальной и горизонтальной оси, вычисленных (для шаговых двигателей) Программой 5. Направление определяется в системе координат комплекса.
Распознавание изображения БПЛА и измерение его координат на изображении выполняется с использованием общеизвестных методов автоматической идентификация точек на изображениях и вычислительных алгоритмов, применяемых при обработке изображений. Вычисление направления (двух углов) выполняются с использованием общеизвестных методов, вычислительных алгоритмов и формул применяемых в фотограмметрии и геодезии.
Примеры таковых алгоритмов, в частности, приводятся:
1. Зотов Р.В. Аэрогеодезия: учебное пособие: в 2-х книгах. Книга 2 – Омск: СибАДИ, 2012- 218с., см. на стр.17-21. http://bek.sibadi.org/fulltext/epd724.pdf
2. Зотов Р.В. Аэрогеодезия: учебное пособие в 2-х книгах. Книга 1 –Омск, СибАДИ, 2012,-216с., см. на стр. 81-84. http://bek.sibadi.org/fulltext/epd723.pdf
3. Волкова М.А., Луцив В.Р. Методы обработки и распознавания изображений.
Учебно-методическое пособие по лабораторному практикуму. – СПб: Университет ИТМО, 2016. – 40 с. http://books.ifmo.ru/file/pdf/1979.pdf.
Программа 5. Программа выполняет вычисление параметров для наведения дальномерных станций на беспилотный летательный аппарат. Для каждой ДС вычисляется направление, а именно горизонтальный и вертикальный углы наведения ДС на БПЛА в системе координат комплекса. Направление определяется по координатам дальномерных станций и координатам и беспилотного летательного аппарата общеизвестным в геодезии методом.
Вычисление предварительных (приближенных) координат положения БПЛА в СКК выполняется посредством пересчета координат БПЛА из общеземной системы координат в СКК с использованием параметров перехода (трансформации) из общеземной системы координат в СКК, вычисленных Программой 3.
Вычисление временного сдвига ts между ДС при измерении расстояний до БПЛА разными ДС. Временной сдвиг, т.е. разсинхронизация, измерения расстояний от ДС до отражателей на БПЛА позволяет выполнить идентификацию, а именно, от какой ДС выполнено измерение до БПЛА. Вычисление временного сдвига выполняется по формуле:
ts = ТD /n ,
где ТD – время доступа одного отражателя, n – количество ДС.
Примеры алгоритмов, в частности, приводятся:
1. Онлайн калькулятор. Направляющие косинусы.
https://0oq.ru/reshebnik-onlajn/ru.onlinemschool.com/math/assistance/vector/cos/default.htm.
1. Безменов В.М. Теоретические основы преобразования пространственных геоцентрических систем координат. Методические указания. Казанский государственный университет. 28.с.
https://shelly.kpfu.ru/e-ksu/docs/F441125048/Teoreticheskie.osnovy.preobrazovaniya..sistem.koordinat.pdf;
Программа 6. Программа выполняет вычисление пространственного и углового положения беспилотного летательного аппарата в системе координат комплекса.
Вычисляются:
- значения пространственных координат и трех углов Эйлера (крен, рысканье, тангаж) БПЛА;
- погрешности (ошибки) определения пространственных координат БПЛА и углов.
Указанные параметры определяются по расстояниям, измеренным от ДС до отражателей, установленных на БПЛА.
Предварительно для каждого отражателя БПЛА определяются пространственные координаты и ошибки, с которыми они получены. Вычисление пространственных координат и их ошибок выполняются с использованием общеизвестного в геодезии метода и алгоритма пространственной засечки (пересечение сфер). Предварительно для каждого базиса между отражателями БПЛА вычисляется его фактическая длина путём учета поправки Δ (постоянной величины для каждого базиса между отражателями БПЛА), см. формулы 1, 2.
Координаты БПЛА и ошибки, с которыми они получены, вычисляются на основе координат и ошибок, всех доступных отражателей. Например, как среднее статистическое: в общем случае по четырём отражателям.
Углы ориентации (три угла Эйлера) и ошибки, которые им соответствуют, определяются с использованием значений пространственных координат отражателей БПЛА и ошибок, с которыми определены эти координаты. Предусматривается возможность определения углов ориентации и соответствующих им погрешностей с использованием указанных данных минимум от трёх отражателей.
Математическая обработка выполняется с использованием общеизвестных методов и алгоритмов: линейной пространственной засечки, метода наименьших квадратов, а также робастных статистических процедур. Примеры, в частности, приводятся:
1. Огородова Л.В., Шилкин П.А Определение геодезических координат из пространственной линейной засечки: учебное пособие. 2-е изд. — M.: МИИГАиК, 2015–28 с.
https://docplayer.ru/61676752-Opredelenie-geodezicheskih-koordinat-iz-prostranstvennoy-lineynoy-zasechki.html .
Метод наименьших квадратов и робастные статистические процедуры.
2. Безменов В.М. Фотограмметрия. Построение и уравнивание аналитической фототриангуляции. Учебно-методическое пособие. КГУ, Казань, 2009, 86с.
https://shelly.kpfu.ru/e-ksu/docs/F1746491752/Analiticheskaya.fototriangulyaciya.pdf
Программа 7. Программа формирования кодов. Выполняет преобразование параметров, вычисленных Программами 1, 5 в цифровые сигналы (коды) для последующей их передачи на ДС с помощью радиомодема блока управления.
Взаимодействие вычислительных программ блока управления комплексом изображена на Фиг.8.
Таким образом, на основании приведенного выше описания блока управления комплексом (БУК) можно сделать вывод, что заявителем достигнут заявленный технический результат, а именно – определены конструкционные и функциональные связи между блоком управления и дальномерными станциями, реализованные посредством использования программного комплекса, состоящего из 7 вычислительных программ, что приводит к возможности осуществления совместного функционирования блока управления и дальномерных станций и заявленного комплекса в целом.
Кроме этого, введение в состав заявленного комплекса одного блока управления комплексом по сравнению с двумя блоками прототипа позволяет достигнуть следующих заявленных технических результатов:
- повышение надёжности определения пространственного и углового положения БПЛА в системе координат комплекса из-за устранения возможных помех в процессе передачи информации посредством канала радиосвязи с одного блока управления на другой;
- повышение технологичности, эффективности функционирования заявленного комплекса и удобства в управлении комплексом за счёт уменьшения количества элементов комплекса;
- уменьшение числа специалистов, обслуживающих комплекс, за счет уменьшения элементов комплекса;
- уменьшение числа программ программного обеспечения с 8 у прототипа до 7, что приводит к уменьшению времени расчетов, что, в свою очередь, имеет значение при обработке результатов в реальном режиме времени.
Обработка изображений, полученных с БПЛА с целью определения координат точек объекта, осуществляется с использованием известного программного обеспечения, например, Agisoft Metashape, PHOTOMOD и др.
Далее заявителем приведены примеры осуществления работы заявленного комплекса.
Пример 1. Определение пространственных координат точек объекта при съёмке с помощью цифровой камеры БПЛА.
Определение пространственных координат точек объекта при съёмке с помощью цифровой камеры БПЛА проводят по следующим этапам.
Этап 1. Определение длины базиса между отражателями БПЛА и поправки Δ (постоянной величины для каждого базиса между отражателями БПЛА).
Для этого БПЛА устанавливается, например, на калибровочный стенд (Фиг.9). Электронными тахеометрами 34/1, 34/2 калибровочного стенда с применением общеизвестного в геодезии метода пространственной засечки выполняется определение длины (ВК) каждого базиса отражателей БПЛА. Значение длины базиса (ВК) вычисляется с использованием программного обеспечения электронного тахеометра. Затем с использованием лазерного дальномера 31 и мини-призмы 32 каждого базиса, также определяется значение длины каждого базиса Влд. Поправка определяется по формуле 1, а именно Δ = ВК – Влд. Далее значение поправки вводится в программное обеспечение БУК.
Определено:
для первого базиса Δ = 2505,5 мм – 2499,6 мм = +5,9 мм;
для второго базиса Δ = 2504,8 мм – 2502,5 мм = +2,3мм.
Далее значение поправки вводится в программное обеспечение БУК.
Этап 2. Планирование полёта БПЛА.
Планирование полёта выполняется для фотографирования объекта цифровой камерой БПЛА. Планирование полёта БПЛА осуществляется с использованием программного обеспечения, разработанного производителем БПЛА.
Этап 3. Установка ДС.
Каждая дальномерная станция - ДС1, ДС2, ДС3 устанавливается в трегере с помощью зажимного устройства. Затем ДС, зафиксированные в трегере, устанавливаются на штативы, на которых трегер крепится, например, с помощью винтового соединения. ДС1, ДС2, ДС3, установленные на штативах, размещаются на местности на некотором удалении друг от друга (например, на расстоянии 100 - 300 м). ДС на местности располагают таким образом, чтобы между ДС была прямая видимость на время измерения расстояний между ними.
Этап 4. Ориентирование, наведение ДС на ДС.
Дальномерные станции ориентируются в полуавтоматическом режиме, с использованием БУК, на основе данных, рассчитанных программным обеспечением БУК по измерениям ГЛОНАСС/GPS-приёмников ДС, переданных с ДС в БУК. ДС ориентируются следующим образом: ДС1 ориентируется на ДС2; ДС2 ориентируется на ДС3; ДС3 ориентируется на ДС1.
Этап 5. Измерение расстояний между ДС.
Лазерным дальномером ДС измеряются расстояния в следующем порядке: ДС1 до ДС2; ДС2 до ДС3; ДС3 до ДС1. Расстояния между ДС измеряются с точностью 1-2 мм. Измеренные расстояния: от ДС1 до ДС2; от ДС2 до ДС3; от ДС3 до ДС1 при помощи приёмно-передающих устройств ДС1, ДС2, ДС3 передаются в БУК. По измеренным расстояниям между ДС задаётся пространственная система координат комплекса.
Этап 6. Взлёт БПЛА.
БПЛА с использованием БУК поднимается в воздух, согласно спланированного полётного задания, например, на высоту 120 метров.
Этап 7. Наведение ДС на БПЛА и измерение расстояний от ДС до отражателей БПЛА.
Дальномерные станции наводятся на БПЛА в автоматическом режиме, с использованием БУК, по данным, рассчитанным программным обеспечением БУК по измерениям ГЛОНАСС/GPS-приёмников БПЛА и ГЛОНАСС/GPS-приёмников ДС, переданных с ДС и БПЛА в БУК. После наведения ДС на БПЛА измеряются расстояния до отражателей БПЛА, а именно, от ДС1 до каждого отражателя БПЛА, от ДС2 до каждого отражателя БПЛА, от ДС3 до каждого отражателя БПЛА. Расстояния от ДС до отражателей БПЛА измеряются с точностью 1-2 мм.
Этап 8. Фотографирование объекта цифровой камерой БПЛА.
Фотографирование объекта выполняется согласно спланированного полетного задания.
Этап 9. Вычисление пространственного положения и углового положения БПЛА в СКК и погрешностей (ошибок), с которыми они определены.
Пространственное и угловое положение БПЛА в СКК и погрешности (ошибки), с которыми они определены, рассчитываются на момент фотографирования объекта съёмочной камерой БПЛА по расстояниям, измеренным от ДС1, ДС2, ДС3 до отражателей БПЛА. Расчет пространственного и углового положения БПЛА и их ошибок выполняется программным обеспечением БУК.
Этап 10. Измерение в автоматическом (или полуавтоматическом) режиме изображений объекта, полученного с БПЛА, и определение пространственных координат точек удалённого объекта.
Измерение изображений и определение координат точек объекта выполнено с использованием известного программного обеспечения Agisoft Metashape (https://www.geoscan.aero/ru/software/agisoft/metashape_standard).
При расстоянии 100 метров между ДС, высоте полёта БПЛА 100 метров, расстоянии от БПЛА до удалённого объекта 50 метров, ошибке измерения расстояния между ДС и от ДС до БПЛА, равной 1 мм, при использовании цифровой съёмочной камеры БПЛА с фокусным расстоянием 50 мм и размером пикселя 5,6 мкм достигнуты следующие результаты:
• координаты БПЛА в СКК определены с ошибкой 2 мм;
• углы БПЛА в СКК определены:
- угол крена и тангажа с ошибкой 0,0085°;
- угол рысканья с ошибкой 0,015°;
• пространственные координаты точек удаленного объекта определены с ошибкой 7- 12 мм (Mx = 7 мм, My = 10 мм, Mz = 10 мм).
Определение ошибок пространственных координат точек объекта выполнено известным способом [Патент на изобретение RU № 2714525 «Способ определения средней квадратической ошибки пространственных координат точек исследуемого объекта из обработки изображений, полученных разными съемочными камерами с произвольными значениями элементов ориентирования»] [7]
Пример 2. Определение пространственных координат точек объекта при съемке с помощью лазерного сканера БПЛА.
Определение пространственных координат точек объекта при съемке с помощью лазерного сканера БПЛА проводят следующим образом.
Этапы 1 – 7 проводят аналогично Примеру 1.
Этап 8. Съёмка объекта лазерным сканером БПЛА, например, сканером RIEGL VUX-1UAV.
Съёмка объекта выполняется согласно спланированного полетного задания.
Этап 9. Вычисление пространственного положения и углового положения БПЛА в СКК и погрешностей (ошибок), с которыми они определены.
Пространственное и угловое положение БПЛА в СКК и погрешности (ошибки), с которыми они определены, рассчитываются на момент съёмки объекта лазерным сканером БПЛА по расстояниям, измеренным от ДС1, ДС2, ДС3 до отражателей БПЛА. Расчет пространственного и углового положения БПЛА и их ошибок выполняется программным обеспечением БУК.
При расстоянии 100 метров между ДС, высоте полёта БПЛА 100 метров, расстоянии от БПЛА до удалённого объекта 50 метров, ошибке измерения расстояния между ДС и от ДС до БПЛА, равной 1 мм, при использовании лазерного сканера БПЛА достигнуты следующие результаты:
• координаты БПЛА в СКК определены с ошибкой 2 мм;
• углы БПЛА в СКК определены:
- угол крена и тангажа с ошибкой 0,0085°;
- угол рысканья с ошибкой 0,015°;
• пространственные координаты точек удаленного объекта определены с ошибкой 10 - 15 мм (Mx = 10 мм, My = 10 мм, Mz = 15 мм).
Таким образом, из описанного выше можно сделать вывод, что заявителем достигнуты все поставленные цели и заявленный технический результат, а именно:
Разработан комплекс для определения пространственных координат удаленного объекта, расположенного на местности, с точностью, находящейся в диапазоне от 0.002 до 0.015 м (2-15 мм), в режиме реального времени и в режиме постобработки по результатам обработки изображений, полученных с БПЛА, и результатам определения пространственного (с погрешностью не хуже 1-2 мм) и углового (с погрешностью не хуже 30˝) положения БПЛА в системе координат комплекса через определение расстояний между дальномерными станциями комплекса и от дальномерных станций до БПЛА, а именно до отражателей, размещённых на БПЛА.
При этом по сравнению с прототипом:
1. Определены конструкционные и функциональные связи между составными элементами дальномерных станций, что привело к возможности осуществления совместного функционирования составных элементов дальномерных станций и заявленного комплекса в целом.
2. Определены конструкционные и функциональные связи между блоком управления и дальномерными станциями, что привело к возможности осуществления совместного функционирования блока управления и дальномерных станций и заявленного комплекса в целом.
3. Обеспечена возможность вращения функционального элемента дальномерных станций вокруг вертикальной оси и горизонтальной оси путем введения в состав дальномерных станций шаговых двигателей, что привело к возможности осуществления наведения лазерного дальномера дальномерной станции на отражательную призму другой дальномерной станции с целью измерения расстояния между дальномерными станциями, а также возможности осуществления непрерывного наведения лазерного дальномера дальномерной станции на БПЛА с целью непрерывного измерения расстояния до отражателей БПЛА.
4. Уменьшено количество блоков управления с двух до одного и устранен канал связи между ними, за счет чего достигнуто:
• повышение надёжности определения пространственного и углового положения БПЛА в системе координат комплекса из-за устранения возможных помех в процессе передачи информации посредством канала радиосвязи с одного блока управления на другой;
• повышение технологичности, эффективности функционирования заявленного комплекса и удобства в управлении комплексом за счёт уменьшения количества элементов комплекса;
• уменьшение числа специалистов, обслуживающих комплекс, за счет уменьшения элементов комплекса;
• уменьшение числа программ программного обеспечения, что приводит к уменьшению времени расчетов, что, в свою очередь, имеет значение при обработке результатов в реальном режиме времени.
3. Повышена надежность определения пространственного и углового положения БПЛА в системе координат комплекса за счет непрерывного измерения базиса (расстояния) между парой противоположных отражателей, путем введения в состав модуля отражателей лазерного дальномера и мини-призмы на каждый базис с возможностью их смещения перпендикулярно базису с целью обеспечения прямой видимости между ними.
4. Снижены временные и трудозатраты при подготовке БПЛА к полету при целенаправленном изменении длины базиса между отражателями за счет автоматического измерения длины базиса с помощью лазерного дальномера и мини-призмы, при этом калибровочный стенд используют однократно при контрольном измерении длины базиса.
Заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям, т.к. из исследованного заявителем уровня техники не выявлена совокупность признаков, приведенная в независимом пункте заявленного технического решения.
Заявленное техническое решение соответствует критерию «изобретательский уровень», предъявляемому к изобретениям, т.к. из исследованного заявителем уровня техники не выявлены технические решения с заявленной совокупностью существенных признаков, приведенных в независимом пункте заявленного технического решения, и не выявлены технические результаты, реализуемые посредством применения указанных признаков.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям, т.к. реализовано в виде натурного объекта, прошло апробирование в полевых условиях и получило подтверждение возможности реализовать все заявленные цели и технический результат.
Использованные источники.
1. Назаров А.С.Фотограмметрия. – Минск: ТерраСистемс, 2010.—400 с.
2. Лимонов А.Н., Гаврилова Л.А. Фотограмметрия и дистанционное зондирование. – М.: Академический проект. 2016. – 296 с.
3. Бабашкин Н.М., Кадничанский С.А., Нехин С.С. Сравнение эффективности аэрофототопографической съемки с использованием беспилотных и пилотируемых авиационных систем. Геопрофи, №1, 2017.- с.14-19.
4. Патент на изобретение № 2681836. Способ определения пространственных координат и углового положения удаленного объекта. Приоритет изобретения 13 февраля 2018г. Дата государственной регистрации в реестре изобретений РФ 13 марта 2019 г.
5. Патент РФ № 2567865 от 01.07.2014. Квашенников В.В., Шабанов А.К. Способ позиционирования удаленного объекта с помощью дальномерно-угломерных приборов.
6. URL:https://www.applanix.com/downloads/products/specs/
APX20_UAV.pdf (дата обращения: 16.07.20).
7. Патент на изобретение № 2714525. Способ определения средней квадратической ошибки пространственных координат точек исследуемого объекта из обработки изображений, полученных разными съемочными камерами с произвольными значениями элементов ориентирования. Приоритет изобретения 30 июля 2019г. Дата государственной регистрации в реестре изобретений РФ 18 февраля 2020 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| Способ определения средней квадратической ошибки пространственных координат точек исследуемого объекта из обработки изображений, полученных разными съемочными камерами с произвольными значениями элементов ориентирования | 2019 |
|
RU2714525C1 |
| КОМБИНИРОВАННЫЙ СПОСОБ ОБНАРУЖЕНИЯ И ИДЕНТИФИКАЦИИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2824851C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| Способ мониторинга при помощи беспилотного летательного аппарата | 2023 |
|
RU2826350C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Устройство перехвата беспилотных летательных аппаратов | 2020 |
|
RU2738383C2 |
| СПОСОБ ПРИМЕНЕНИЯ РОБОТИЗИРОВАННОГО ТАХЕОМЕТРА И БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ НАЗЕМНОГО ОБЪЕКТА | 2023 |
|
RU2809177C1 |
| КОМПЛЕКС БОРТОВОЙ АППАРАТУРЫ СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2005 |
|
RU2290681C1 |
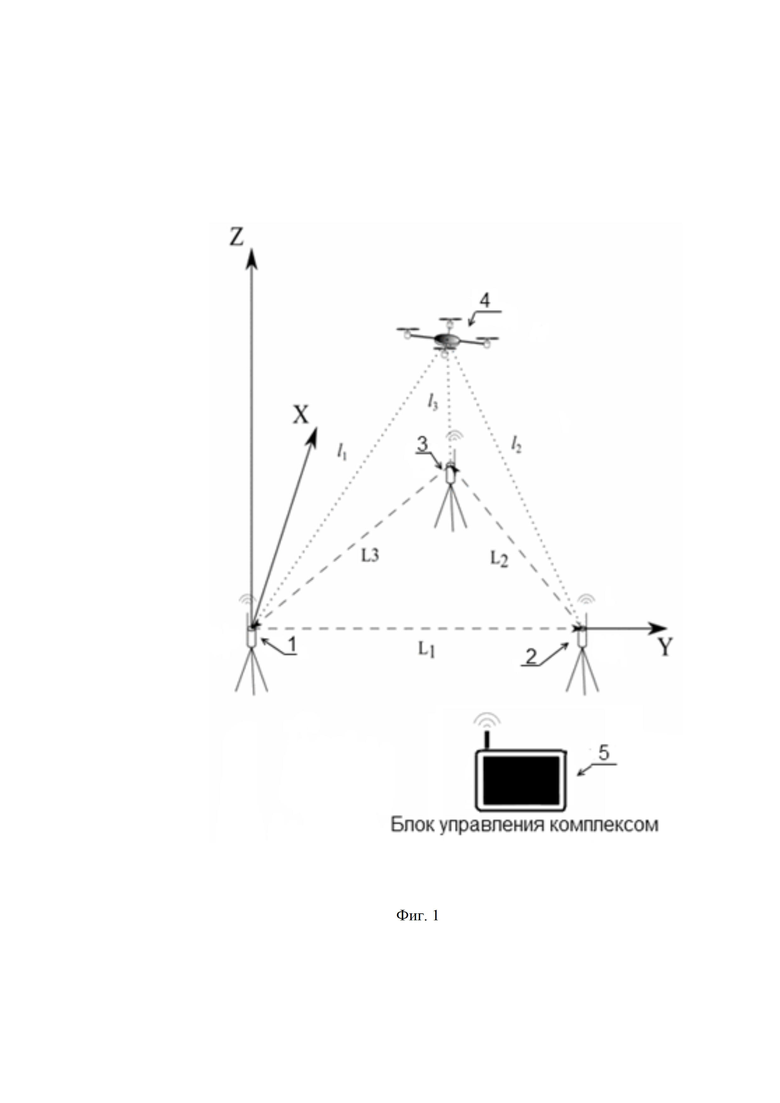
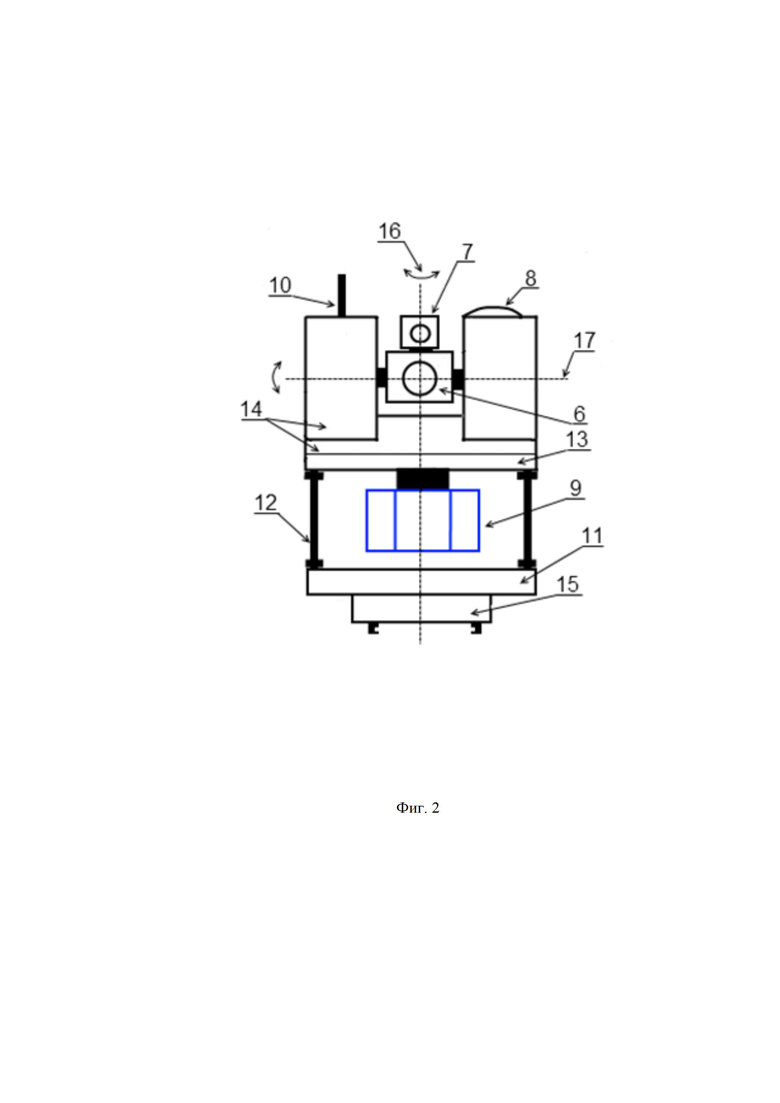
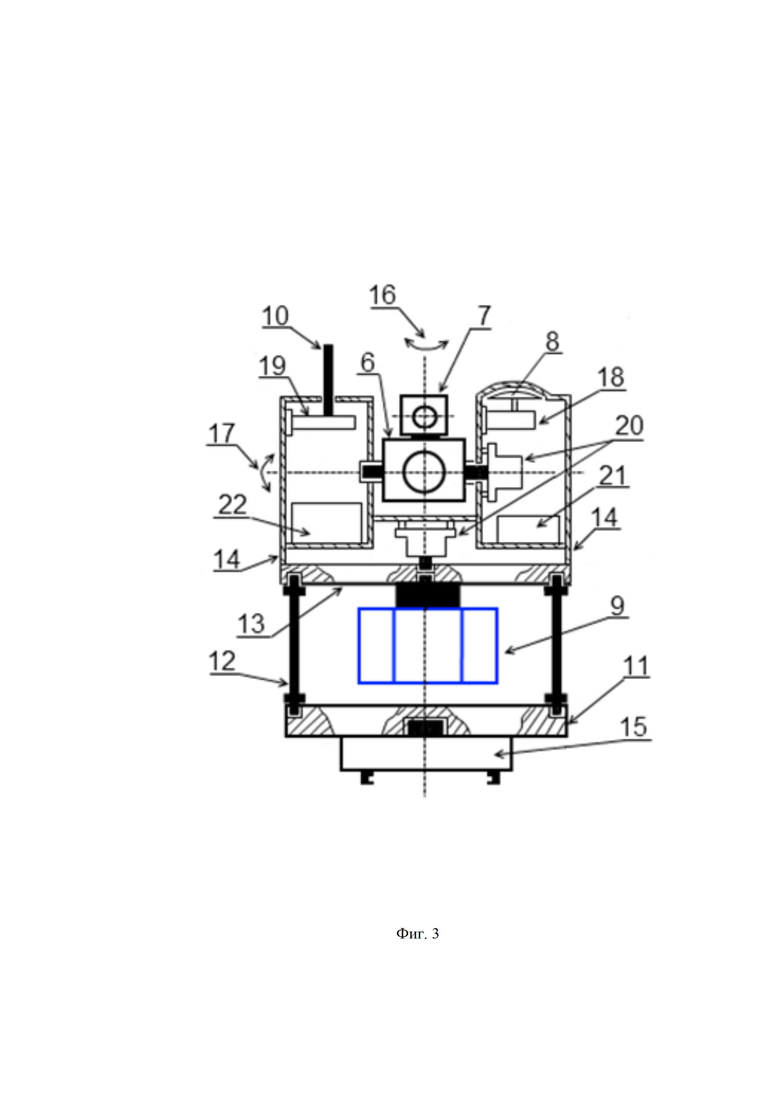
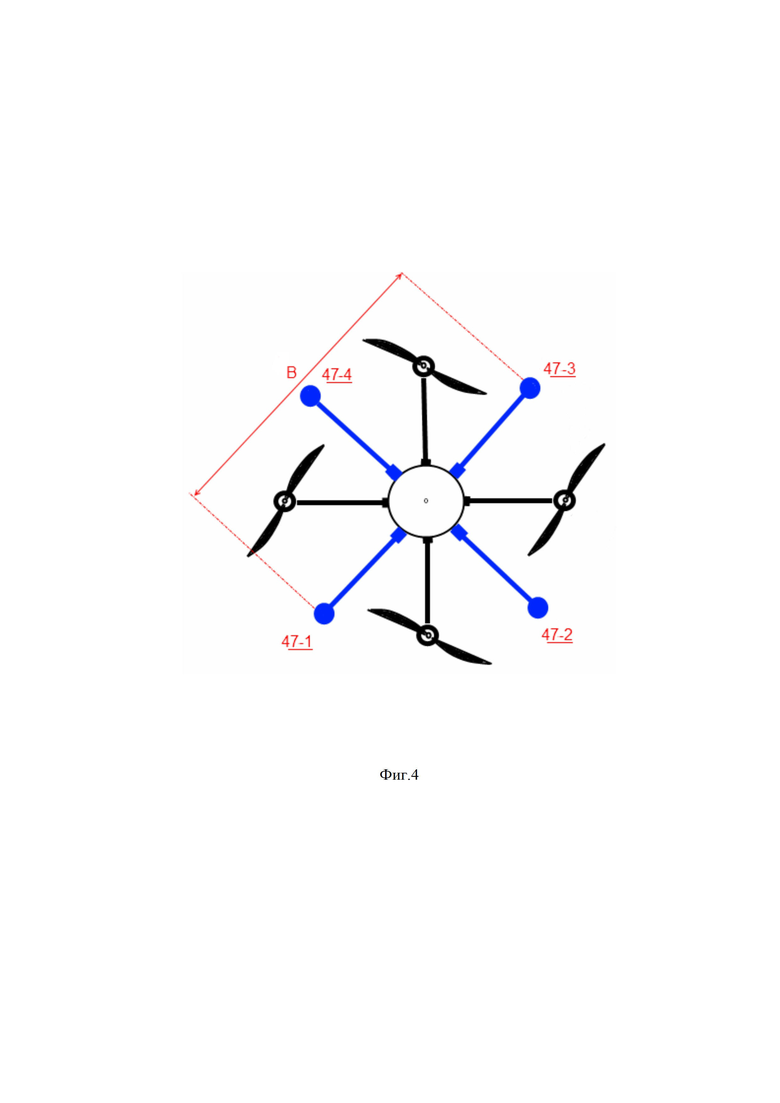
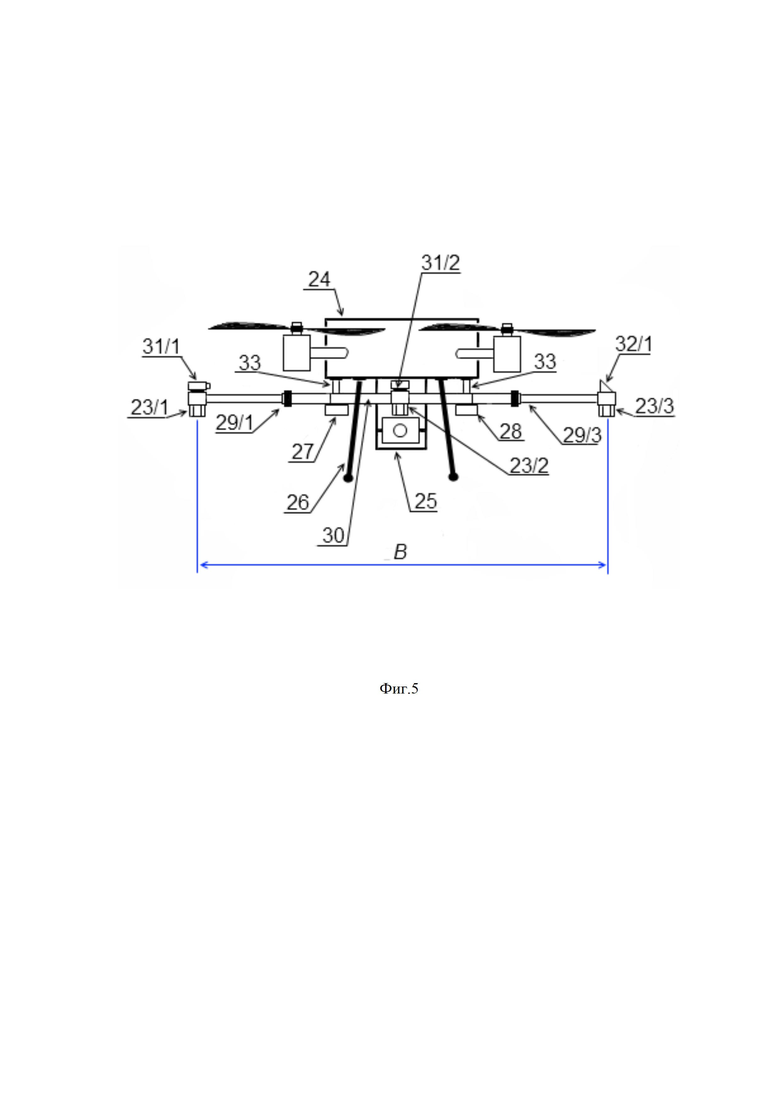
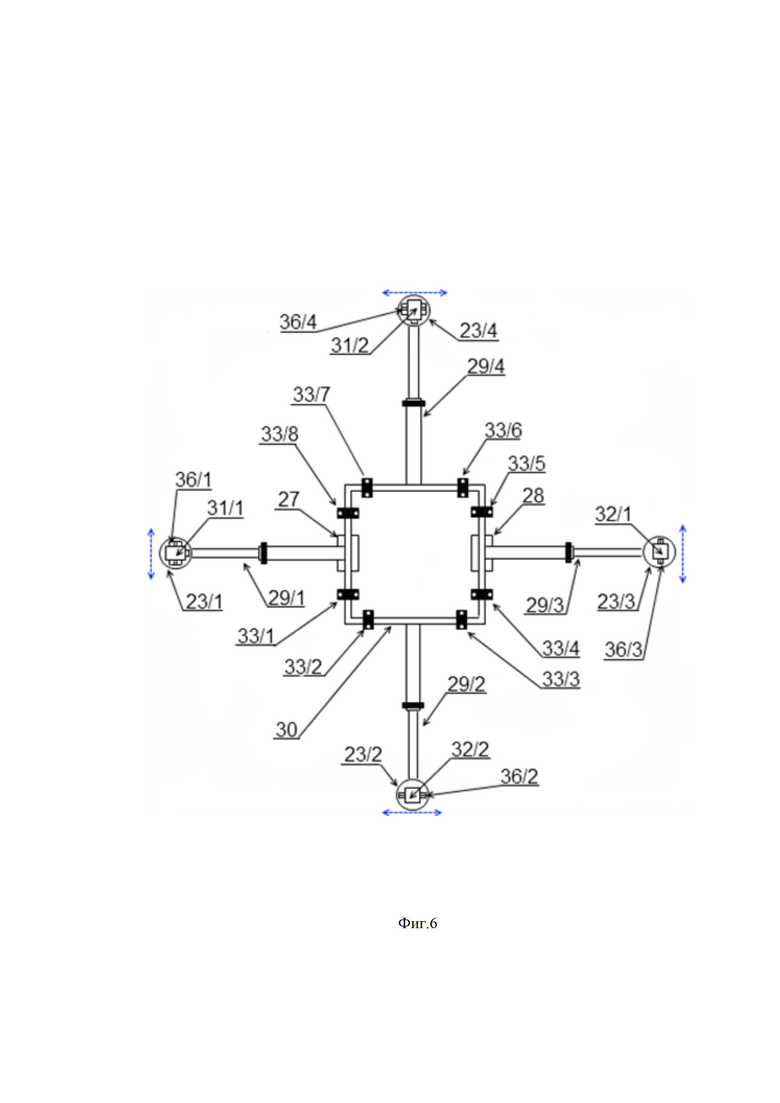
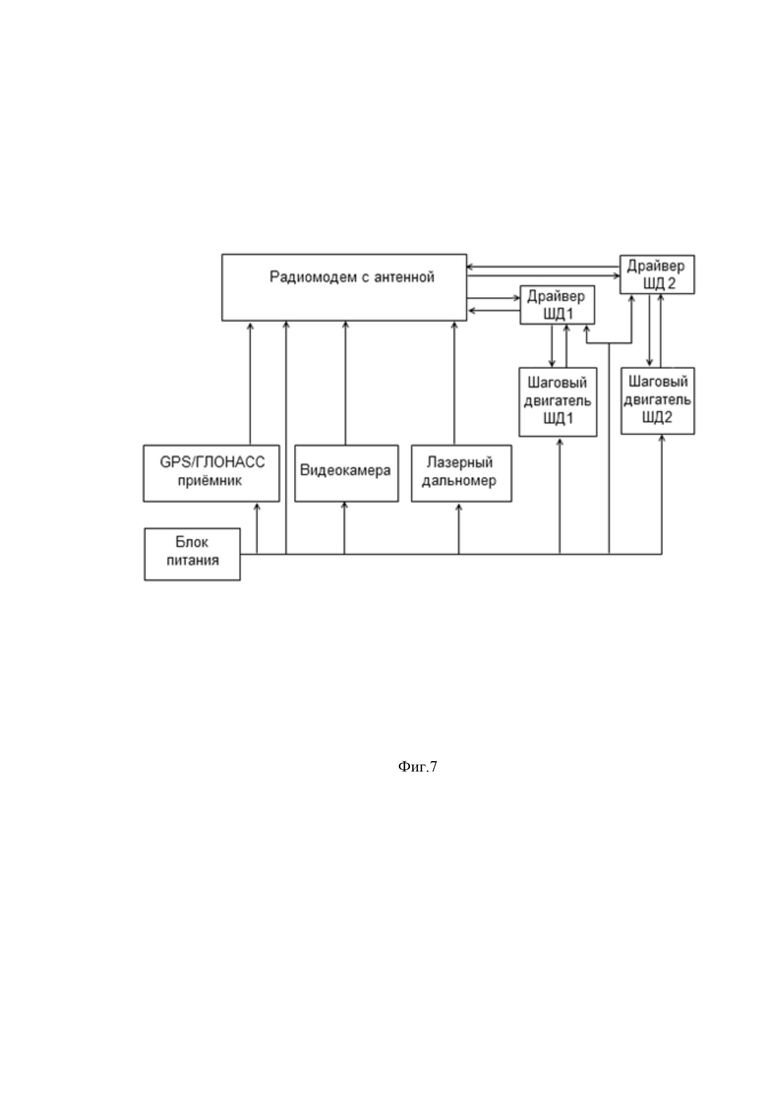
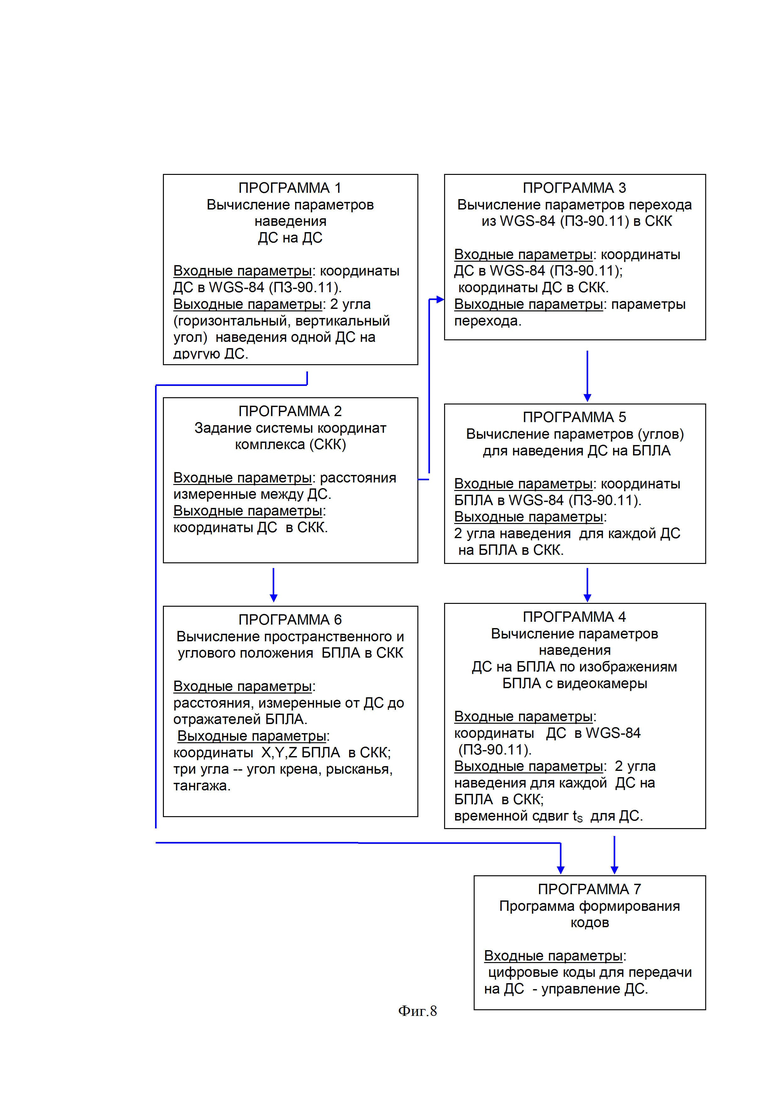
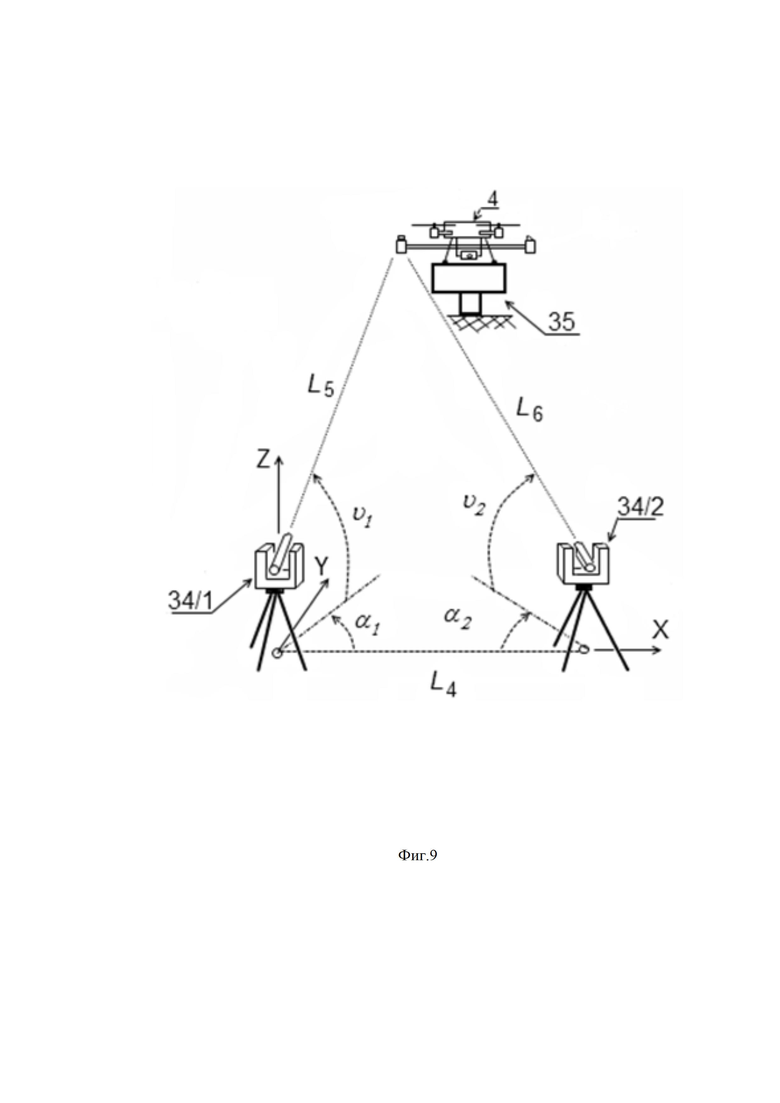
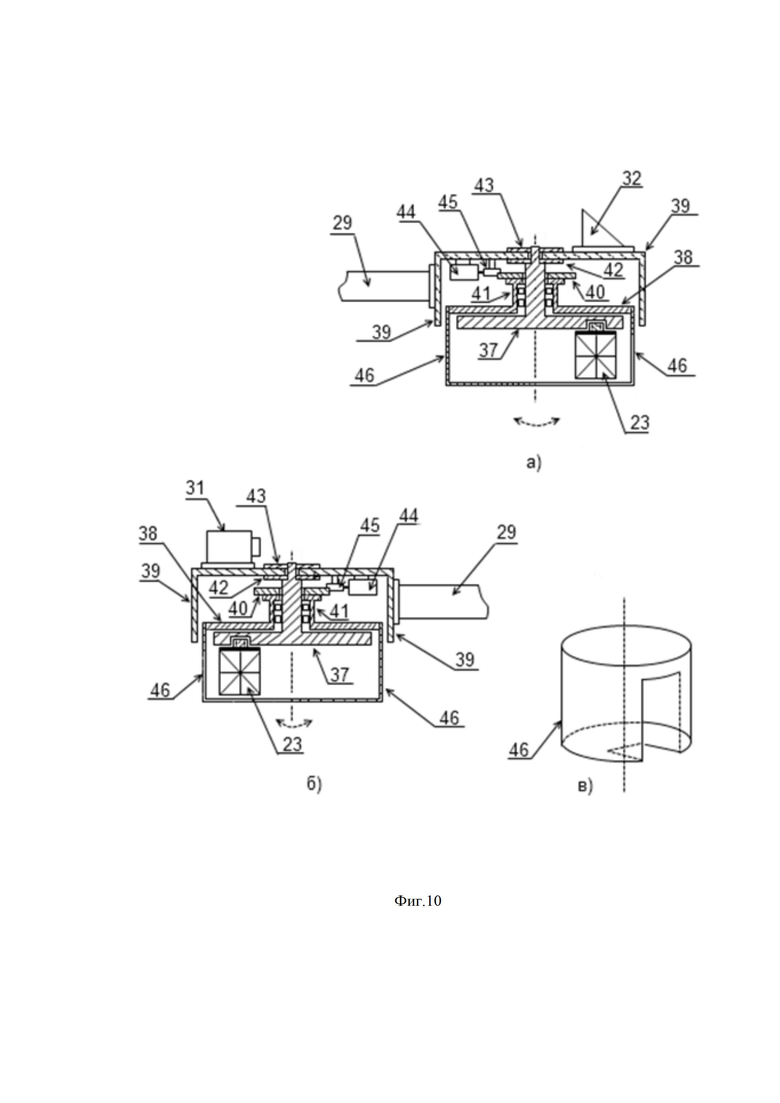
Изобретение относится к области навигации, геодезии, картографии, фотограмметрии и может быть использовано для построения топографических планов, трёхмерных моделей местности, решения инженерно-геодезических задач с погрешностью определения пространственных координат в диапазоне от 0.002 м до 0.015 м. Технический результат заключается в повышении надёжности определения пространственных координат удаленного объекта. Предложен комплекс для определения пространственных координат удаленного объекта, расположенного на местности, состоящий из: не менее трех дальномерных станций, беспилотного летательного аппарата, оснащенного модулем отражателей, блока управления комплексом; при этом дальномерная станция содержит неподвижное основание, к которому крепится функциональный элемент дальномерной станции, где неподвижное основание представляет собой платформу, к которой крепится адаптер трегера. Функциональный элемент дальномерной станции состоит из неподвижной платформы, к которой крепится отражательная призма, и вращающейся части, которая состоит из следующих элементов, прикрепленных к корпусу вращающейся части: приёмно-передающего устройства с антенной, лазерного дальномера, ГЛОНАСС/GPS-навигатора с приёмной антенной, цифровой видеокамеры, двух шаговых двигателей с драйверами с возможностью обеспечения вращения функционального элемента дальномерной станции вокруг вертикальной оси и горизонтальной оси, блока питания. Беспилотный летательный аппарат оснащен цифровой камерой или лазерным сканером, и модулем отражателей, который содержит: раму модуля отражателей, которая крепится к беспилотному летательному аппарату с помощью стоек крепления; устройства с отражателями, которые крепятся на телескопических штангах, лазерные дальномеры и мини-призмы, которые крепятся попарно над отражателями на паре противоположных устройств с отражателями, контроллер модуля отражателей и блок питания модуля отражателей, которые крепятся к раме модуля отражателей. 1 з.п. ф-лы, 10 ил.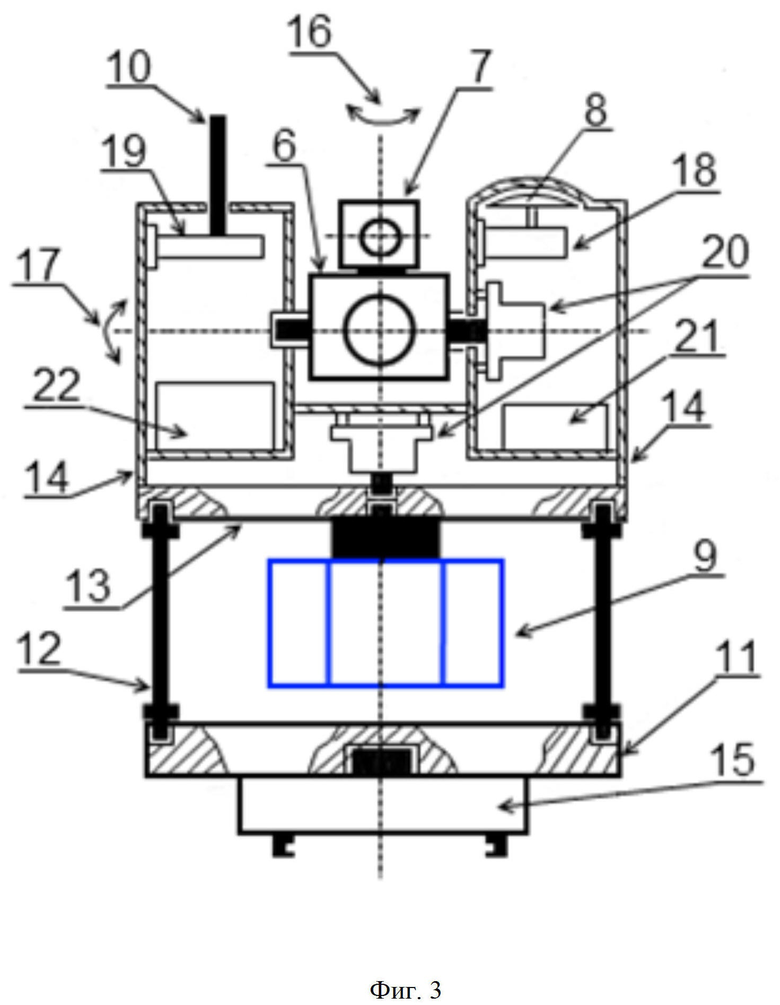
1. Комплекс для определения пространственных координат удаленного объекта, расположенного на местности, состоящий из:
не менее трех дальномерных станций, беспилотного летательного аппарата, оснащенного модулем отражателей, блока управления комплексом;
при этом дальномерная станция содержит неподвижное основание, к которому крепится функциональный элемент дальномерной станции,
при этом неподвижное основание представляет собой платформу, к которой крепится адаптер трегера, при помощи которого дальномерная станция фиксируется в трегере, установленном на геодезическом штативе;
при этом функциональный элемент дальномерной станции состоит из неподвижной платформы, к которой крепится отражательная призма,
и вращающейся части, которая состоит из следующих элементов, прикрепленных к корпусу вращающейся части:
- приёмно-передающего устройства с антенной, с возможностью двухсторонней связи с блоком управления комплексом, а именно - возможности передачи на блок управления комплексом измеренной информации - расстояний до другой дальномерной станции, расстояний от дальномерной станции до отражателей, установленных на беспилотный летательный аппарат, ГЛОНАСС/GPS-измерений положения дальномерной станции в общеземной системе координат, а также возможности приёма от блока управления комплексом информации для управления дальномерной станцией в автоматическом и ручном режимах - наведение на другую дальномерную станцию и измерения до неё расстояния, наведение на беспилотный летательный аппарат и измерение расстояний до отражателей, установленных на беспилотном летательном аппарате;
- лазерного дальномера, с возможностью измерения расстояния до отражателя другой дальномерной станции, а также до отражателей, установленных на беспилотном летательном аппарате, и далее с возможностью обеспечения передачи измеренных лазерным дальномером расстояний посредством приёмно-передающего устройства с антенной в блок управления комплексом;
- ГЛОНАСС/GPS-навигатора с приёмной антенной с возможностью определения координат дальномерной станции в известной общеземной системе координат, и далее с возможностью обеспечения передачи измеренных координат дальномерной станции посредством приёмно-передающего устройства в блок управления комплексом;
- цифровой видеокамеры с возможностью передачи изображения посредством приёмно-передающего устройства с антенной в блок управления комплексом, и возможностью отображения процесса наведения на другую дальномерную станцию и на беспилотный летательный аппарат на экране монитора блока управления комплексом, а также с возможностью определения направления на беспилотный летательный аппарат по измерениям координат изображения беспилотного летательного аппарата, опознанного в автоматическом режиме на изображении цифровой видеокамеры;
- двух шаговых двигателей с драйверами с возможностью обеспечения вращения функционального элемента дальномерной станции вокруг вертикальной оси и горизонтальной оси и далее с возможностью обеспечения наведения лазерного дальномера на отражательную призму другой дальномерной станции, а также на отражатели беспилотного летательного аппарата по горизонтальному и вертикальному углу в системе координат комплекса, определяемых на основе данных ГЛОНАСС/GPS-навигаторов, установленных на дальномерных станциях и беспилотном летательном аппарате;
- блока питания;
причем элементы вращающейся части функционального элемента дальномерной станции соединены между собой кабельными соединениями;
при этом беспилотный летательный аппарат оснащен цифровой камерой или лазерным сканером, и модулем отражателей, содержащем четное количество отражателей для отражения лазерного излучения от дальномерных станций, но не менее четырех отражателей;
при этом модуль отражателей содержит:
- раму модуля отражателей, которая крепится к беспилотному летательному аппарату с помощью стоек крепления;
- устройства с отражателями, которые крепятся на телескопических штангах, расположенных в двух взаимно перпендикулярных направлениях парами и прикрепленных в свою очередь к раме модуля отражателей; причем отражатели в устройстве с отражателями крепятся к плоской стороне неподвижной круглой платформы, которая в свою очередь с помощью своей цилиндрической оси с резьбой плоской гайкой и плоской шайбой крепится к цилиндру, который в свою очередь крепится к телескопической штанге; причем на ось неподвижной круглой платформы предварительно крепятся подшипники и вращающаяся круглая платформа с полой осью, на торце которой закреплена шестерня, а к боковой поверхности вращающейся платформы прикреплён цилиндр со щелью в нижнем основании и в образующей указанного цилиндра, с возможностью вращения круглой платформы с полой осью с прикреплённым к ней цилиндром вокруг оси неподвижной платформы, причем вращение обеспечивают с помощью электрического двигателя и редуктора, прикреплённых к внутренней поверхности верхнего основания цилиндра;
- лазерные дальномеры и мини-призмы, которые крепятся попарно над отражателями на паре противоположных устройств с отражателями с возможностью определения базиса между отражателями; между лазерным дальномером и мини-призмой обеспечивается прямая видимость путем возможности смещения лазерного дальномера и мини-призмы в направлении, перпендикулярному базису, на котором они расположены, за счет обеспечения возможности их смещения вбок по перпендикулярным направляющим, расположенным на верхней части устройств с отражателями;
- контроллер модуля отражателей и блок питания модуля отражателей, которые крепятся к раме модуля отражателей;
при этом блок управления комплексом содержит компьютер с подсоединенным к нему многоканальным радиомодемом с антенной с возможностью приема информации от дальномерных станций и передачи информации к дальномерным станциям, а также с возможностью приема информации от беспилотного летательного аппарата и передачи информации к беспилотному летательному аппарату; при этом компьютер оснащен программным обеспечением с возможностью планирования и управления полётом беспилотного летательного аппарата, в том числе в ручном режиме, а также программным обеспечением с возможностью управления дальномерными станциями.
2. Комплекс по п. 1, отличающийся тем, что функциональный элемент дальномерной станции крепится к неподвижному основанию при помощи штанг.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ | 2012 |
|
RU2513900C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ УДАЛЕННОГО ОБЪЕКТА С ПОМОЩЬЮ ДАЛЬНОМЕРНО-УГЛОМЕРНЫХ ПРИБОРОВ | 2014 |
|
RU2567865C1 |
| Способ определения пространственных координат и углового положения удаленного объекта | 2018 |
|
RU2681836C1 |
| ОГНЕУПОРНЫЕ И РАЗДЕЛИТЕЛЬНЫЕ СОСТАВЫ | 0 |
|
SU179434A1 |
| БУНКЕР ХЛОПКОУБОРОЧНОЙ МАШИНЫ | 0 |
|
SU195749A1 |
| CN 111366137 A, 2020.07.03 | |||
| US 2018040251 A1, 2018.02.08. | |||

