ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способам коррекции перемещения пациента для конусно-лучевой компьютерной томографии.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Следующее описание относится к трехмерной конусно-лучевой рентгеновской компьютерной томографии (СВСТ, Cone-Beam Computed Tomography) для применения в медицине, в которой для реконструкции трехмерных поперечных изображений анатомии пациента используется большое число изображений рентгеновских проекций, полученных с разных углов. Длительность получения изображений рентгеновских проекций обычно составляет 10 - 30 секунд, поскольку рентгеновская трубка (источник рентгеновского излучения) и датчик (детектор рентгеновского излучения) должны физически пройти по пространственной траектории, соответствующей углам получения изображений. Траектория перемещения для получения изображений обычно реализуется с помощью механизма поворота и перемещения.
Для того чтобы реконструированное изображение СВСТ точно соответствовало анатомии, траектория перемещения для получения изображений должна быть известна с достаточной точностью, и отображаемый объект во время получения изображений рентгеновских проекций должен оставаться совершенно неподвижным, поскольку предполагается, что результаты измерений изображений проекций представляют совместно зарегистрированные интегрированные виды неподвижного объекта. В результате формируется набор геометрически совместимых результатов измерений, которые могут использоваться для реконструкции распределения затухания, представляющего анализируемую анатомию. При каждом нарушении этих предположений точность реконструированного изображения ухудшается из-за того, что результаты измерений проекций становятся взаимно несовместимыми.
Точность окончательного изображения обычно зависит от того, насколько точно предположения, сделанные в процессе реконструкции, соответствуют процессу получения фактических физических изображений. Предполагаемые пространственные позиции источника и детектора рентгеновского изучения, соответствующие каждому полученному рентгеновскому изображению, оказывают воздействие на вычисление траекторий рентгеновских лучей во время процесса реконструкции СВСТ. Из-за отклонений при производстве и эксплуатации, а также из-за потенциальных искажений изображений в устройстве формирования изображений, реализованные углы поворота и позиции отклоняются от идеальных значений в соответствии с принятой формой траектории перемещения для получения изображений. Однако систематическое отклонение может быть обусловлено использованием разных способов калибровки, выполнение которых повторяется через определенный период времени или через определенное число рабочих циклов.
При формировании изображений медицинской СВСТ наиболее существенным источником геометрической погрешности является потенциальное перемещение пациента во время получения изображений рентгеновских проекций. А именно, если отображаемый объект перемещается во время получения изображений рентгеновских проекций, то результаты измерений эффективных траекторий рентгеновских лучей становятся взаимно несовместимыми. Несмотря на то, что хорошо известно, что пациент не должен изменять свое положение, и что пациентам регулярно напоминают об этом, пациент, как правило, не может оставаться совершенно неподвижным во время получения изображений рентгеновских проекций. Обычно для решения этой проблемы пациент фиксируется. Однако плотное фиксирование очень неудобно для пациента. Кроме того, для полного предотвращения перемещений потребовались бы средства фиксации, сковывающие пациента, которые не могут применяться в обычных условиях формирования изображений.
При формировании изображений медицинской СВСТ обе описанные выше погрешности имеются, в той или иной степени, во всех практических измерениях. В наихудшем сценарии из-за неудовлетворительной результирующей геометрической несовместимости результатов измерений изображений проекций даже может потребоваться повторение процесса сканирования после проверки качества реконструкции изображений рентгенологом. Это нежелательно по причине дозы облучения, получаемой пациентом при сборе рентгеновских изображений, которую стремятся сохранить минимальной возможной.
Для устранения проблемы геометрической неточности при формировании изображений компьютерной томографии были разработаны надлежащие способы вычислений. В описанных в литературе способах виртуальное перемещение источника рентгеновского излучения и детектора рентгеновского излучения с использованием жесткого геометрического преобразования в фиксированной системе координат применялось для моделирования и компенсации жесткого перемещения во время получения изображений проекций. В последних подходах, относящихся к формированию изображений медицинской СВСТ, такое геометрическое преобразование оптимизируется путем максимизации резкости результирующей реконструкции СВСТ. Обычно такой процесс корректировки выполняется итеративно.
При формировании изображений СВСТ применение фиксированной системы координат для моделирования и компенсации перемещений пациента не является идеальным решением, поскольку собственные геометрические степени свободы в процессе формирования изображений СВСТ этой системой координат не поддерживаются. В устройстве формирования изображений СВСТ рентгеновские лучи расходятся и формируют пирамидальный конус. В результате этого смещение вдоль изотропного луча от источника рентгеновского излучения к центру детектора рентгеновского излучения влияет только на коэффициент усиления, а смещение в плоскости матрицы пикселов детектора рентгеновского излучения приведет к максимальному смещению отображаемого объекта в пределах его изображения проекции. Кроме того, предотвращение результирующего преобразования, выполняемого в результате примененной геометрической коррекции с помощью известных средств жесткой регистрации результирующей скорректированной и нескорректированной реконструкции СВСТ, является очень затратным процессом с точки зрения вычислений, особенно при неоднократном применении во время процесса геометрической коррекции.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В предложенном в настоящем изобретении процессе коррекции перемещения пациента для медицинской конусно-лучевой компьютерной томографии (СВСТ, Cone-Beam Computed Tomography) управляемый данными алгоритм, в котором используется собственная вращающаяся система координат, привязанная к пространственным позициям и ориентации источника и детектора рентгеновского излучения, применяется для установления улучшенной оценки фактической геометрии процесса формирования изображений в соответствии с измеренными изображениями рентгеновских проекций. Результирующее преобразование в фиксированной опорной системе координат предотвращается за счет вычисления и вычитания результирующего преобразования непосредственно из предполагаемых параметров корректирующего геометрического преобразования. В результате этого относительные позиции системы источника и детектора рентгеновского излучения относительно пациента, или наоборот, оцениваются за прошедший период и улучшаются на основе содержимого изображений рентгеновских проекций. Целью процесса коррекции является улучшение качества результирующих изображений при реконструкции СВСТ путем улучшения геометрического соответствия результатов измерений рентгеновских изображений, а также более полного выполнения требований к реконструкции томографических изображений. Встроенная система координат предоставляет возможность определения применяемых геометрических степеней свободы в соответствии с их относительной важностью как для процесса коррекции, так и для конечного качества изображений.
Для предложенного в настоящем изобретении процесса коррекции перемещения пациента в качестве входных данных используются данные, которые обычно требуются для вычисления реконструкции изображений СВСТ: набор изображений рентгеновских проекций и оценка геометрии трехмерной проекции в соответствии с пространственными позициями источника и детектора рентгеновского излучения во время получения изображений рентгеновских проекций. Подобно соответствующим способам, сначала вычисляется промежуточная реконструкция с использованием предполагаемой геометрии проекции. Затем с помощью преобразования, соответствующего виртуальному перемещению источника и детектора рентгеновского излучения во время получения изображений, устанавливается корректирующее геометрическое преобразование, улучшающее геометрическое соответствие каждого рентгеновского изображения проекции, к которому предоставляется доступ, с остальными рентгеновскими изображениями проекций. В частности, для определения корректирующего геометрического преобразования применяется специфичная для изображений проекций вращающаяся система координат. Для процесса коррекции, включающего вычисление промежуточной реконструкции с использованием текущей оценки геометрии проекции и последующую оптимизацию корректирующих преобразований, может быть выполнено несколько итераций. После установления корректирующих геометрических преобразований вычисляется конечная реконструкция СВСТ с использованием изображений рентгеновских проекций и конечной оценки геометрии проекции в соответствии с корректирующими преобразованиями.
Преимущество предложенного в настоящем изобретении процесса коррекции перемещения пациента перед реконструкцией конечного изображения СВСТ заключается в улучшении геометрической совместимости изображений проекций, что обеспечивает возможность достижения более высокого качества изображений с точки зрения резкости, уровня детализации и контрастности. Дополнительное преимущество процесса коррекции заключается в том, что за счет потенциального предотвращения повторного сканирования из-за ухудшения качества изображений с точки зрения геометрии проекции может быть уменьшена получаемая пациентом доза облучения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Прилагаемые чертежи обеспечивают лучшее понимание предложенного в настоящем изобретении способа коррекции перемещения пациента. К описанию прилагаются следующие чертежи:
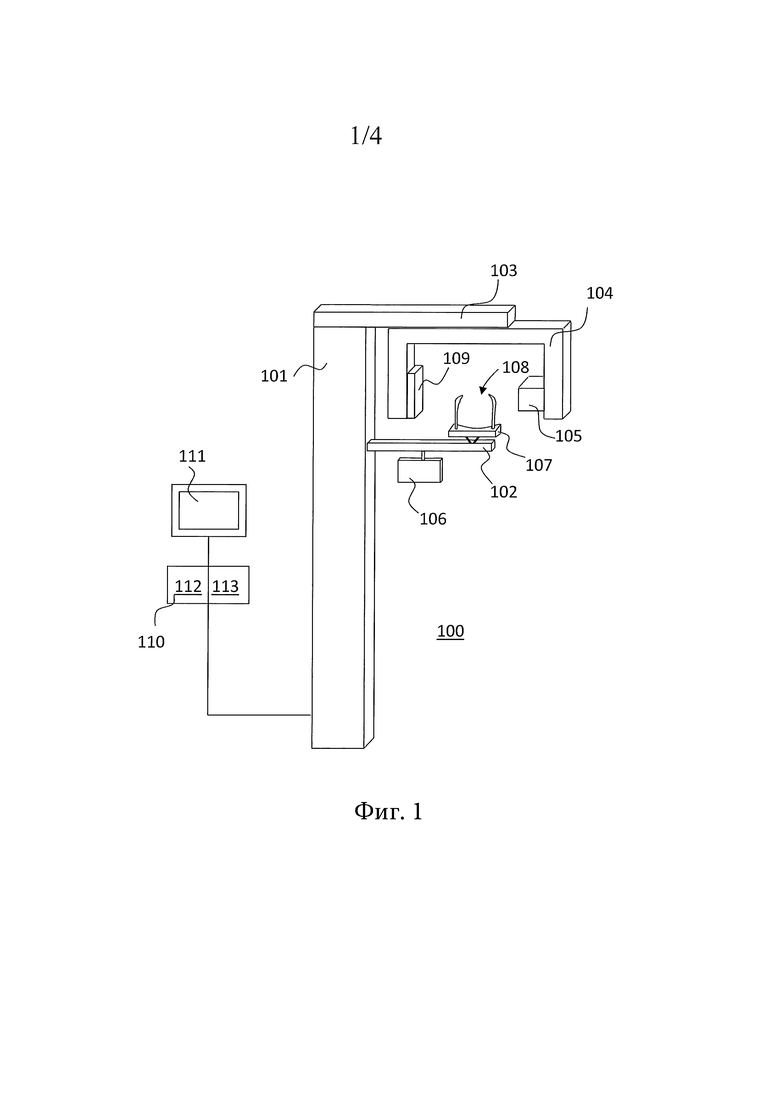
На фиг. 1 показан пример типового устройства формирования изображений СВСТ.
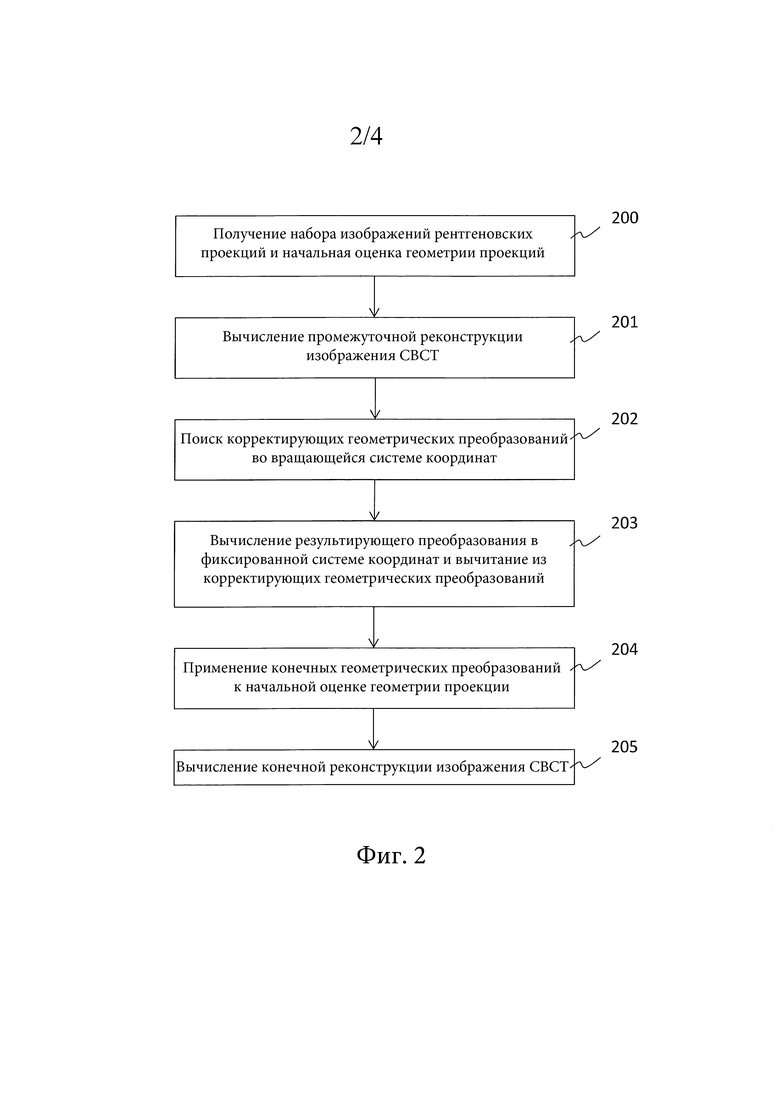
На фиг. 2 показан алгоритм выполнения предложенного в настоящем изобретении способа коррекции перемещения пациента.
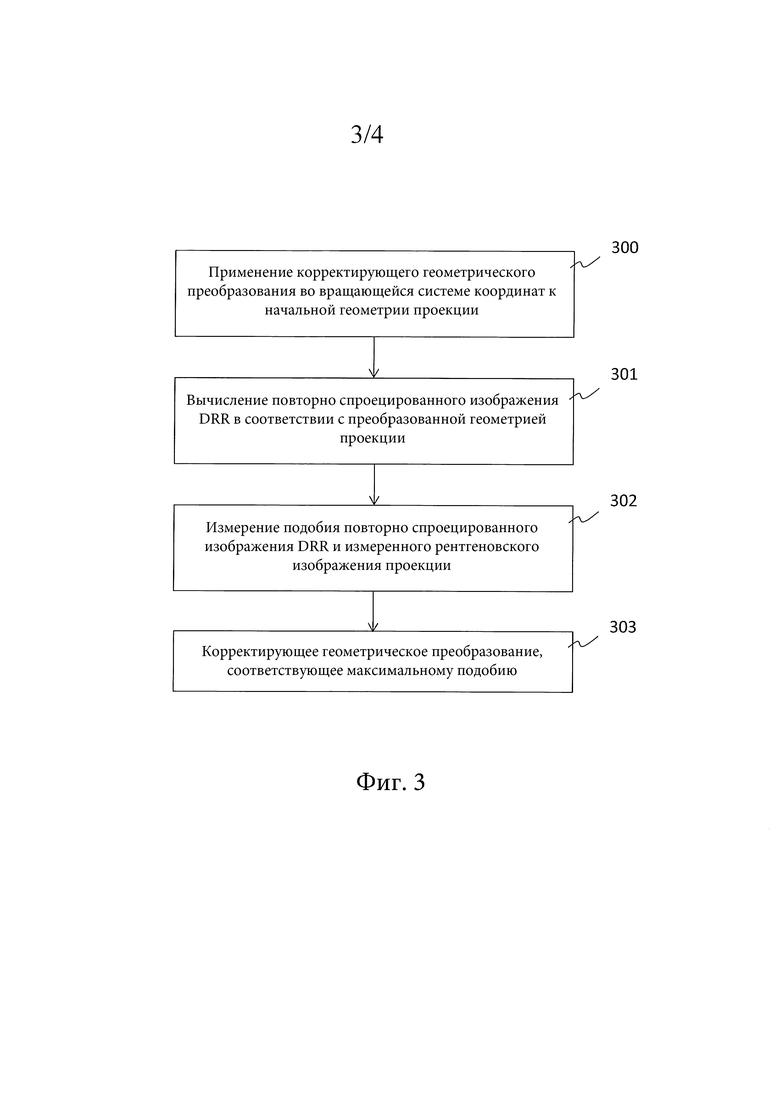
На фиг. 3 показан алгоритм выполнения предложенного способа с подробным описанием шага 203 на фиг. 2.
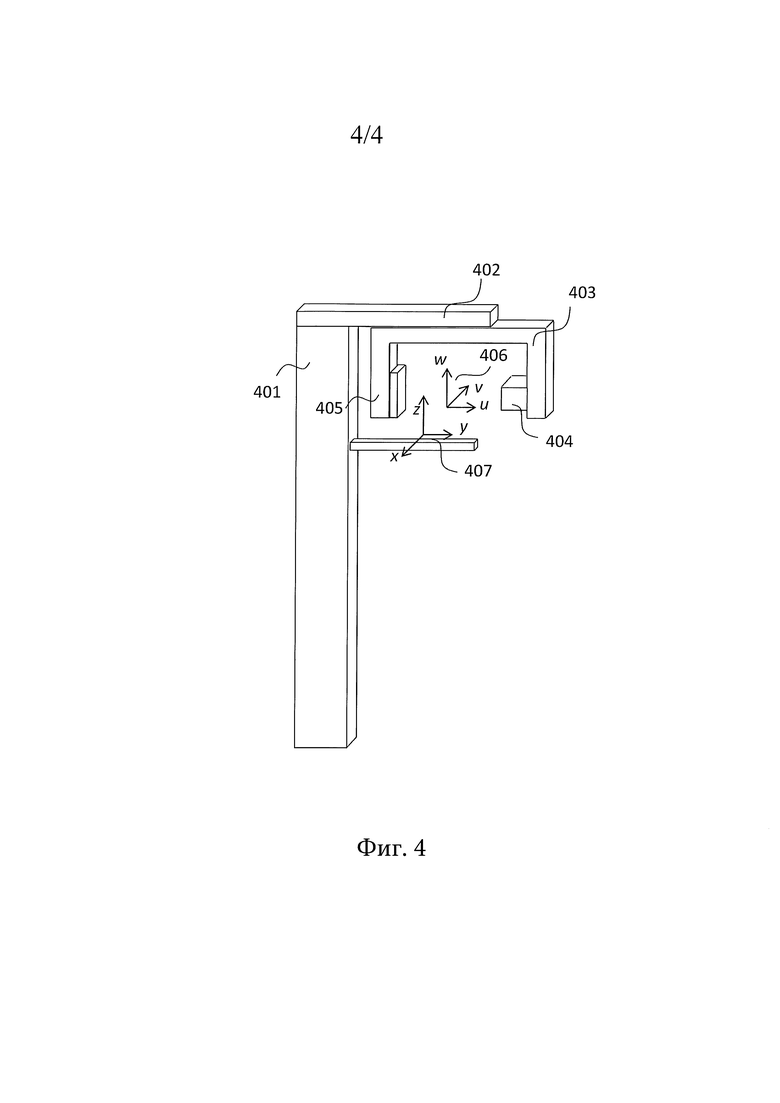
На фиг. 4 показано устройство формирования изображений СВСТ с вращающейся системой координат, применяемое в предложенном в настоящем изобретении способе коррекции перемещения пациента.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для вычисления трехмерной реконструкции СВСТ выполняются измерения двухмерных изображений рентгеновских проекций с использованием источника и детектора рентгеновского излучения, которые вращаются вокруг отображаемой анатомии. Для формирования каждого изображения рентгеновской проекции обычно требуется несколько миллисекунд, и в случае типовых скоростей сканирования непрерывное перемещение источника и детектора рентгеновского излучения не приводит к какой-либо заметной размытости изображений проекций. Для вычисления трехмерной реконструкции с использованием подходящего способа, например с использованием алгоритма реконструкции FDK, трехмерные пространственные позиции источника и детектора рентгеновского излучения в соответствующей опорной системе координат, содержащей данные формирования изображений или геометрии проекции, должны быть доступны для алгоритма реконструкции.
Типовое описание геометрии формирования изображений состоит из трехмерных позиций фокуса источника рентгеновского излучения и центра детектора рентгеновского излучения, а также информации для однозначного определения ориентации детектора рентгеновского излучения. Такая информация может состоять, например из углов поворота в опорной системе координат ссылки, которая, при применении в соответствии с предварительно определенным соглашением, будет определять направления горизонтальных и вертикальных осей матрицы пикселов детектора. Описание геометрии проекции обычно формируется на основе информации о физических показателях устройства формирования изображений, а также об идеальных траекториях формирования изображений, соответствующих заданной программе формирования изображений. Кроме того, для обеспечения достаточной точности геометрии проекции обычно выполняется периодический процесс калибровки.
В процессе реконструкции моделируется пространственное распространение рентгеновского излучения через отображаемую анатомию. Как правило, для простоты предполагается прямолинейное распространение, и траектории рентгеновских лучей от источника до детектора моделируются как линейные интегралы, которые вычисляются на основе информации, содержавшейся в описании геометрии проекции. Пространственные перекрытия траекторий рентгеновских лучей и элементов матрицы объемных пикселов трехмерных изображений, используемой для реконструкции, устраняются с использованием подходящего алгоритма проекционного устройства и описания геометрии проекции. На основе пространственных перекрытий и измеренных значений в рентгеновских изображениях проекций, общее распределение затухания рентгеновского излучения, соответствующее отображаемой анатомии, может быть реконструировано с использованием подходящего способа, например с использованием хорошо известного алгоритма реконструкции FDK.
Однако фундаментальное допущение, используемое в процессе реконструкции, заключается в том, что отображаемая анатомия была совершенно неподвижной во время получения изображений рентгеновских проекций. Основная причина заключается в том, что проекции рентгеновского излучения должны представлять совместно зарегистрированные результаты измерений неподвижного объекта, которые затем могут быть объединены непротиворечивым образом для реконструкции трехмерной структуры объекта. Систематическая погрешность в геометрии проекции может быть компенсирована выполнением периодического процесса калибровки, с помощью которого устраняются воздействия любых отклонений от предполагаемой идеальной траектории перемещения для получения изображений рентгеновских проекций.
Более трудной проблемой является перемещение пациента во время формирования изображений, которое является непредсказуемым и произвольным по своей природе. Несмотря на то, что это перемещение в значительной степени предотвращается фиксацией пациента во время формирования изображений, относительно большая длительность получения изображений рентгеновских проекций в процессе формирования изображений СВСТ, примерно 10 секунд, делает невозможным полное устранение перемещений пациента. Более того, некоторым пациентам, например детям и пожилым людям, очень трудно оставаться в неподвижном состоянии в течение всего процесса формирования изображений.
При значительном перемещении пациента во время получения изображений рентгеновских проекций в реконструированном изображении могут появиться значительные искажения в виде полос или размытостей, что в наихудшем случае может сделать изображение совершенно бесполезным для анализа. Повторение сканирования может дать лучший результат, но за счет получения пациентом дополнительной дозы облучения.
В описанном используемом в прошлом способе компенсации отрицательных воздействий перемещения пациента сначала вычисляется промежуточная реконструкция СВСТ с использованием двухмерных изображений рентгеновских проекций и предполагаемой геометрии формирования изображений. В этом случае достаточно вычислить промежуточную реконструкцию СВСТ с грубым разрешением, что обычно используется, когда реконструкция предназначена для диагностики. Промежуточная реконструкция предназначена для получения информации из всех изображений рентгеновских проекций с наличием реконструкции, отражающей взаимную геометрическую совместимость измеренных двухмерных изображений рентгеновских проекций.
Оптимизация специфичной для изображений проекций геометрии выполняется на основе измерения сходства физических изображений рентгеновских проекций и соответствующих повторно спроецированных данных промежуточной реконструкции СВСТ, которая формирует цифровую реконструированную рентгенограмму (DRR, Digitally Reconstructed Radiograph). Смысл состоит в том, что когда предполагаемая геометрия проекции является корректной, реконструированное изображение, которое по определению должно соответствовать результатам измерений, переданным изображениями проекций с точки зрения операции прямого проецирования, выдает повторные проекции, которые будут близко соответствовать результатам измерений. В случае геометрического несоответствия повторная проекция промежуточной реконструкции будет отличаться от измеренной проекции. Поскольку промежуточная реконструкция используется как совокупность всех изображений проекций, ее повторная проекция отражает сумму всех изображений проекций, и когда соответствующая геометрия повторной проекции будет соответствовать средней корректной геометрии проекции с точки зрения промежуточной реконструкции, можно ожидать максимальное подобие измеренного рентгеновского изображения проекции и прямых проецированных изображений.
В типовом устройстве формирования изображений СВСТ излучаемые рентгеновские лучи расходятся и формируют пирамидальный конус. Смещение вдоль изотропного луча от источника рентгеновского излучения к центру детектора рентгеновского излучения влияет только на коэффициент усиления, а смещение в плоскости детектора рентгеновского излучения приведет к максимальному смещению отображаемого объекта в пределах его изображения проекции. С этой точки зрения в описанном в настоящем изобретении способе используется вращающаяся система координат, привязанная к физическим позициям источника и детектора рентгеновского излучения во время получения изображений. То есть, две из осей координат привязаны к прямоугольной матрице пикселов детектора рентгеновского излучения, а оставшаяся перпендикулярная ось - к нормали матрицы пикселов детектора. Путем ограничения геометрического преобразования геометрии проекции по этим осям для каждого изображения проекции, можно разделять геометрические степени свободы, важность которых изменяется с точки зрения геометрической точности.
Когда для каждого рентгеновского изображения проекции выполняется отдельное геометрическое преобразование, возможно, что результирующее среднее преобразование окажет воздействие на итоговое реконструированное изображение. Это проявляется, например, как глобальное смещение или поворот реконструированной анатомии относительно нескорректированной анатомии. Возможно, что результирующее преобразование анатомии будет иметь отрицательное воздействие на возможность использования реконструированного изображения. По этой причине, в настоящем изобретении также описывается способ компенсации для результирующего преобразования. Результирующее преобразование можно оценить по передаче преобразования, соответствующего каждому преобразованному изображению проекции, из вращающейся системы координат в фиксированную систему координат. Например, если предположить, что каждое изображение проекции перемещается только вдоль своей горизонтальной оси, то соответствующие перемещения в фиксированной системе координат могут быть вычислены на основе известных горизонтальных осей специфичных для проекций вращающихся систем координат, а для представления результирующего перемещения сети в фиксированной системе координат может быть взято среднее значение. Путем инверсии упомянутой выше передачи, инверсия результирующего преобразования может быть обратно преобразована во вращающиеся системы координат и вычтена из специфичных для изображений проекций преобразований. В результате этого результирующее преобразование в фиксированной системе координат удаляется.
При выполнении процесса оптимизации качество корректирующего геометрического преобразования заданного рентгеновского изображения проекции измеряется по подобию прямого проецированного изображения, соответствующего преобразованной геометрии проекции и исходному рентгеновскому изображению проекции. Подобие повторной проекции и рентгеновской проекции может быть измерено, например, по среднему квадрату разности изображений, коэффициенту корреляции или коэффициенту корреляции градиента. Оптимальное (с точки зрения подобия) геометрическое преобразование для каждого изображения проекции, задающего промежуточную реконструкцию СВСТ, затем может быть определено по экстремуму измерения подобия между прямым проецированным изображением и рентгеновским изображением проекции как функции параметров геометрического преобразования.
Также процесс оптимизации включает вычисление промежуточной реконструкции СВСТ с использованием начальной оценки геометрии рентгеновских проекций; доступ ко всем или к определенному набору измеренных изображений рентгеновских проекций; (для каждого изображения проекции, к которому предоставляется доступ) установление специфичного для изображений проекций корректирующего преобразования путем определения максимального подобия между измеренным рентгеновским изображением проекции и соответствующей прямой проекцией промежуточной реконструкции СВСТ как функции параметров геометрического преобразования, выполняемого во вращающейся системе координат; оценка результирующего преобразования в фиксированной опорной системе координат и вычитание соответствующего преобразования из параметров преобразования во вращающейся системе координат; вычисление конечной реконструкции СВСТ при получении достаточной коррекции согласно оценке.
На фиг. 1 показан пример устройства 100 формирования изображений медицинской СВСТ, в состав которого входит вертикальная базовая стойка 101, от которой горизонтально отходит опорный элемент 102, средства 107 фиксации пациента и кронштейн 103 с элементом для установки устройства формирования изображений, кронштейном 104. На кронштейне с устройством 104 формирования изображений на определенном расстоянии друг от друга находятся источник 105 рентгеновского излучения и приемник 109 информации рентгеновских изображений (детектор рентгеновского излучения), которые установлены относительно средств 107 фиксации пациента таким образом, что место 108 формирования изображений, находящееся между источником 105 рентгеновского излучения и приемником 109 информации рентгеновских изображений, расположено так, что луч, сгенерированный источником 105 рентгеновского излучения, проходит через место 108 формирования изображений к приемнику 109 информации рентгеновских изображений. Кронштейн 104 с устройством формирования изображений может поворачиваться, а его положение относительно удерживающего его кронштейна 103 и/или устройства 108 фиксации пациента может быть изменено. Устройство содержит устройство управления, на фиг. 1 показана панель 106 управления, соединенная с опорным элементом 102, на котором установлены средства 107 фиксации пациента. Устройство 100 формирования изображений может быть подключено кабелем к контроллеру 110, контроллеру, содержащему компьютер с устройством обработки информации изображений, сформированной устройством формирования изображений, и дисплей 111, на котором могут быть показаны изображения. Также контроллер ПО содержит по меньшей мере один процессор 112 и по меньшей мере один модуль 113 памяти. По меньшей мере один процессор 112 может быть сконфигурирован для выполнения компьютерных программ, и по меньшей мере один модуль 113 памяти -для хранения компьютерных программ и необходимых данных. Контроллером ПО может быть компьютер общего назначения, либо специально изготовленное устройство для реализации описанного ниже процесса.
На фиг. 2 показаны шаги предложенного в настоящем изобретении способа коррекции перемещения пациента, который может использоваться, например, для обработки изображений, собираемых системой формирования изображений, показанной на фиг. 1. Этот способ выполняется на основе определения корректирующих геометрических преобразований для первоначально предполагаемой геометрии проекции во вращающейся системе координат, привязанной к позициям источника 105 и детектора 109 рентгеновского излучения.
На шаге 200 способа, показанного на фиг. 2, собирают входные данные, содержащие измеренные рентгеновские изображения проекций и начальную оценку геометрии проекций, соответствующую процессу получения изображений. В устройстве, показанном на фиг. 1, геометрия проекции определяет физическую траекторию источника 105 и детектора 109 рентгеновского излучения, когда они поворачиваются и перемещаются вокруг терминала 108 формирования изображений с помощью кронштейнов 103 и 104. Геометрия проекции также определяет предполагаемую ориентацию детектора 109 рентгеновского излучения. Форма геометрии проекции обычно определяется на основе процедуры калибровки геометрии, в которой используется, например, известный калибровочный фантом с рентгеноконтрастными метками.
На шаге 201 вычисляется промежуточная реконструкция СВСТ для способа оптимизации проекций с использованием входных данных, полученных при выполнении шага 200. Можно использовать версии входных данных с уменьшенной частотой выборок, поскольку в обычных случаях не требуется применение высокого пространственного разрешения, как в изображениях СВСТ, предназначенных для диагностики. Подразумевается, что для промежуточной реконструкции собирается вся доступная физическая и геометрическая информация, собранная при выполнении процесса измерений на шаге 200. Геометрическая несовместимость отражается в промежуточной реконструкции, например, размытостью реконструированных деталей.
На шаге 202 корректирующие геометрические преобразования для изображений проекций устанавливаются во вращающейся системе координат. Целью геометрических преобразований является компенсация геометрической несовместимости в начальной оценке геометрии проекций. Подробная информация о выполнении шага 202 объясняется ниже на примере фиг. 3, но в общем случае корректирующее геометрическое преобразование устанавливается путем определения оптимального геометрического преобразования. Качество преобразования определяется назначением для него значения подобия. Значение подобия вычисляется сравнением повторно спроецированной цифровой реконструированной рентгенограммы (DRR) промежуточной реконструкции изображения СВСТ с соответствующим измеренным рентгеновским изображением проекции с использованием примененной геометрии проекции в соответствии с оцениваемым геометрическим преобразованием. Более высокое значение подобия рассматривается как индикация лучшего корректирующего геометрического преобразования. Применение вращающейся системы координат для геометрического преобразования предоставляет возможность разделения геометрических степеней свободы по их значимости для этой проблемы в геометрии конусно-лучевой проекции.
На шаге 203 вычитается результирующее геометрическое преобразование в фиксированной системе координат. Фиксированная система координат обычно определяется относительно статических компонентов устройства 100 формирования изображений, например компонентов системы формирования изображений, соединенных с терминалом 108 формирования изображений. Результирующее геометрическое преобразование вычисляется линейным переносом геометрических преобразований, установленных при выполнении шага 202, из вращающейся системы координат в фиксированную систему координат. Линейное преобразование легко определяется на основе известных осей координат вращающейся и фиксированной систем координат. После установления результирующего преобразования его инверсия линейно переносится из фиксированной системы координат в соответствующую вращающуюся систему координат. Инверсия результирующего преобразования соответствует набору параметров геометрического преобразования для каждого изображения проекции во вращающейся системе координат. Добавление этих значений к значениям геометрических параметров, установленных при выполнении шага 202, приводит к исключению результирующего преобразования в фиксированной системе координат.
На шаге 204 значения параметров преобразования, полученные при выполнении шага 203, применяют к начальной оценке геометрии проекции для получения скорректированной оценки геометрии проекции. В частности, шаги 201-203 могут быть повторены несколько раз перед переходом к шагу 204.
На шаге 205 с использованием скорректированной оценки геометрии проекции вычисляется конечная реконструкция СВСТ. Конечная реконструкция СВСТ вычисляется обычным способом за исключением ситуации, когда не были выполнены шаги 201-204 и начальная оценка геометрии проекции была заменена скорректированной оценкой геометрии проекции, полученной на шагах 201-204.
На фиг. 3 показан пример деталей выполнения шага 202 в соответствии с фиг. 2. На шаге 300 оцененное геометрическое преобразование применяется к начальной геометрии изображения проекции во вращающейся системе координат. Система координат снова определяется в соответствии с пространственными позициями и ориентацией источника 105 и детектора 109 рентгеновского излучения во время физического получения рассматриваемого изображения проекции. Применение преобразования во вращающейся системе координат включает линейное преобразование из фиксированной системы координат, в которой обычно определяется геометрия изображений, во вращающуюся систему координат, в которой выполняется преобразование, после чего выполняется обратное линейное преобразование из вращающейся системы координат в фиксированную систему координат. Как простой пример достигаемого эффекта, для применения параллельного переноса вдоль горизонтальной оси детектора 109 рентгеновского излучения можно рассмотреть следующее: начальная геометрия проекции изображения проекции преобразуется во вращающуюся систему координат, поступательно перемещается вдоль этой оси вращающейся системы координат на заданное значение, которое соответствует виртуальному перемещению источника и детектора рентгеновского излучения, и затем обратно преобразуется в фиксированную систему координат. Преобразованная геометрия проекции отображается в фиксированной системе координат, и полученная преобразованная геометрия проекции используется как входные данные для выполнения следующего шага 301.
На шаге 301 повторно спроецированное изображение DRR промежуточной реконструкции СВСТ, вычисленной при выполнении шага 201, вычисляется с использованием преобразованной геометрии проекции, полученной при выполнении шага 300. Вычисление изображения DRR может быть выполнено с использованием стандартного алгоритма, например, способа трассировки лучей Сиддона. В типовом алгоритме формирования повторной проекции входные данные алгоритма состоят из конечных точек трехмерного рентгеновского представления и исходного изображения, изображение DRR которого вычисляется с использованием данных о его пространственном положении и ориентации в этой же системе координат. При описанной установке параметров эта система координат соответствует фиксированной системе координат. Воздействие геометрического преобразования, примененного при выполнении шага 300, заключается в изменении конечных точек каждой виртуальной траектории рентгеновских лучей с помощью промежуточной реконструкции СВСТ, которая распространяет эффект геометрического преобразования на полученное изображение DRR.
На шаге 302 анализируется подобие между изображением DRR, полученным при выполнении шага 301, и рентгеновским изображением проекции, полученным при выполнении шага 200. Подобие определяется на основе поточечного сравнения изображений с использованием установленных критериев, например средний квадрат разности изображений или их взаимная корреляция. Для описанного способа не имеет существенного значения, какое измерение используется для анализа подобия. Полученное значение подобия присваивается геометрическим параметрам, указываем как входные данные для шага 300. Более высокое значение подобия рассматривается как индикация более подходящих параметров геометрического преобразования.
На шаге 303 параметры оптимального геометрического преобразования устанавливаются путем поиска параметров, соответствующих самому высокому значению подобия, полученному при выполнении шагов 300-302. При типовой установке параметров шаги 300-302 неоднократно анализируются с помощью соответствующего алгоритма минимизации, например хорошо известного симплексного алгоритм Нельдера-Мида для установления параметров оптимального геометрического преобразования. Эти параметры сохраняются и назначаются конкретному изображению проекции, пока они не будут, возможно, изменены при выполнении шагов 201-203.
На фиг. 4 показана вращающаяся система координат, примененная при выполнении шага 202. В устройстве формирования изображений СВСТ С-образный кронштейн 403 обычно используется для установки источника 404 и детектора 405 рентгеновского излучения. Для установки этого С-образного кронштейна используется вертикальная базовая стойка 401 и кронштейн 402. При формировании изображений СВСТ рентгеновские лучи расходятся и формируют пирамидальный конус. Смещение вдоль изотропного луча от источника 404 рентгеновского излучения к центру детектора 405 рентгеновского излучения влияет только на коэффициент усиления, а смещение в плоскости матрицы пикселов детектора рентгеновского излучения приведет к максимальному смещению отображаемого объекта в пределах его изображения проекции. С этой точки зрения в описанном в настоящем изобретении способе используется вращающаяся система 406 координат UVW, привязанная к физическим позициям и ориентациям матрицы пикселов источника и детектора рентгеновского излучения во время получения изображений. Путем ограничения геометрического преобразования геометрии проекций по этим собственным осям для каждого изображения проекции, можно разделять геометрические степени свободы, важность которых изменяется с точки зрения геометрической точности. Фиксированная система координат, в которой вычисляется результирующее преобразование, обозначается как система 407 координат XYZ.
При установке оси U системы координат по нормали детектора рентгеновского излучения, а оси V - по горизонтальной оси матрицы пикселов детектора рентгеновского излучения, создаются следующие степени свободы, например, в случае жесткого преобразования:
1. Продольное смещение вдоль нормали матрицы пикселов детектора рентгеновского излучения (ось U); 2. Боковое смещение вдоль горизонтальной оси матрицы пикселов детектора рентгеновского излучения (ось V); 3. Вертикальное смещение вдоль вертикальной оси матрицы пикселов детектора рентгеновского излучения (ось W); 4. Вращение вокруг оси U (угол поворота); 5. Вращение вокруг оси V (угол наклона); 6. Вращение вокруг оси W (угол курса).
Результатом предложенного в настоящем изобретении способа коррекции перемещения пациента является улучшенная оценка геометрии проекций, соответствующая физическому сбору изображений рентгеновских проекций, и, соответственно, изображение реконструкции СВСТ, в котором уменьшено воздействие геометрической несовместимости.
Предложенный в настоящем изобретении способ может быть реализован в виде программного обеспечения, выполняемого в вычислительном устройстве. Это программное обеспечение записывается на машиночитаемый носитель, чтобы оно могло быть введено в вычислительное устройство, например в контроллер ПО, показанный на фиг. 1.
Как сказано выше, компоненты примеров осуществления настоящего изобретения могут содержать машиночитаемый носитель или модули памяти для сохранения инструкций, запрограммированных в соответствии с вариантами осуществления настоящего изобретения, и для сохранения структур данных, таблиц, записей и/или других описанных здесь данных. Машиночитаемый носитель может содержать любой носитель для предоставления процессору инструкций для выполнения. Стандартные формы машиночитаемых носителей могут содержать, например дискету, жесткий диск, магнитную ленту, любой другой подходящий магнитный носитель, компакт-диск (CD-ROM), записываемый компакт-диск (CD±R), перезаписываемый компакт-диск (CD±RW), DVD-диск, двусторонний DVD-диск (DVD-RAM), перезаписываемый DVD-диск (DVD±RW), DVD-диск с однократной записью (DVD±R), DVD-диск высокой четкости (HD DVD), записываемый DVD-диск высокой четкости (HD DVD-R), перезаписываемый DVD-диск высокой четкости (HD DVD-RW), двусторонний DVD-диск высокой четкости (HD DVD-RAM), диск Blu-ray, любой другой подходящий оптический носитель, RAM, PROM, EPROM, FLASH - EPROM, любую другую подходящую микросхему памяти или картридж, носитель несущей или любой другой подходящий носитель, которой может быть прочитан компьютером.
Для специалиста в этой области техники очевидно, что медицинское устройство формирования изображений с самокалибровкой может быть реализовано различными способами. Медицинское устройство формирования изображений с самокалибровкой и варианты его осуществления не ограничены приведенными выше примерами; они могут изменяться в пределах формулы изобретения.
Группа изобретений относится к медицине, а именно к коррекции перемещения пациента для конусно-лучевой компьютерной томографии. Предложено устройство, содержащее машиночитаемый носитель, которое используется для реализации способа, содержащего: получение набора изображений рентгеновских проекций исследуемого пациента с использованием устройства формирования рентгеновских изображений, содержащего источник и детектор рентгеновского излучения; определение начальной оценки геометрии проекций, описывающей пространственные позиции и ориентацию источника и детектора рентгеновского излучения во время получения изображений рентгеновских проекций; вычисление промежуточной реконструкции СВСТ с использованием изображений рентгеновских проекций и начальной оценки геометрии проекций; определение корректирующих геометрических преобразований, зависящих от изображений проекций, для начальной оценки геометрии проекций на основе изображений рентгеновских проекций, начальной оценки геометрии проекций и промежуточной реконструкции СВСТ и вычисление конечной реконструкции СВСТ с использованием изображений рентгеновских проекций и скорректированной оценки геометрии проекций в соответствии с упомянутыми определенными корректирующими геометрическими преобразованиями, при этом корректирующие геометрические преобразования для начальной оценки геометрии проекций определяют во вращающейся системе координат, зависящей от изображений проекций, в соответствии с пространственными позициями и ориентациями источника и детектора рентгеновского излучения во время получения изображений рентгеновских проекций. Группа изобретений обеспечивает коррекцию перемещения пациента для конусно-лучевой компьютерной томографии. 3 н. и 6 з.п. ф-лы. 4 ил.
1. Способ коррекции перемещения пациента для конусно-лучевой компьютерной томографии (СВСТ), содержащий:
получение набора изображений рентгеновских проекций исследуемого пациента с использованием устройства формирования рентгеновских изображений, содержащего источник и детектор рентгеновского излучения;
определение начальной оценки геометрии проекций, описывающей пространственные позиции и ориентацию источника и детектора рентгеновского излучения во время получения изображений рентгеновских проекций;
вычисление промежуточной реконструкции СВСТ с использованием изображений рентгеновских проекций и начальной оценки геометрии проекций;
определение корректирующих геометрических преобразований, зависящих от изображений проекций, для начальной оценки геометрии проекций на основе изображений рентгеновских проекций, начальной оценки геометрии проекций и промежуточной реконструкции СВСТ и
вычисление конечной реконструкции СВСТ с использованием изображений рентгеновских проекций и скорректированной оценки геометрии проекций в соответствии с упомянутыми определенными корректирующими геометрическими преобразованиями,
отличающийся тем, что корректирующие геометрические преобразования для начальной оценки геометрии проекций определяют во вращающейся системе координат, зависящей от изображений проекций, в соответствии с пространственными позициями и ориентациями источника и детектора рентгеновского излучения во время получения изображений рентгеновских проекций.
2. Способ по п. 1, в котором упомянутую вращающуюся систему координат, зависящую от изображений проекций, определяют путем установки двух перпендикулярных осей в соответствии с матрицей пикселов детектора рентгеновского излучения и установки третьей перпендикулярной оси в соответствии с нормалью матрицы пикселов детектора рентгеновского излучения.
3. Способ по п. 1 или 2, в котором геометрию проекций повторно спроецированной цифровой реконструированной рентгенограммы формируют с применением геометрического преобразования во вращающейся системе координат к начальной оценке геометрии проекции.
4. Способ по любому из пп. 1-3, в котором корректирующие геометрические преобразования устанавливают путем определения максимального подобия между рентгеновскими изображениями проекций и соответствующими повторно спроецированными цифровыми реконструированными рентгенограммами промежуточной реконструкции СВСТ.
5. Способ по любому из пп. 1-4, в котором результирующее преобразование вычисляют в фиксированной системе координат и вычитают из корректирующих геометрических преобразований, определенных во вращающейся системе координат.
6. Способ по любому из пп. 1-5, в котором результирующее преобразование в фиксированной системе координат вычисляют путем передачи корректирующих геометрических преобразований, зависящих от изображений проекций, из вращающейся системы координат в фиксированную систему координат, и определения их среднего значения, и вычитания среднего значения из геометрических преобразований после передачи из фиксированной системы координат во вращающуюся систему координат.
7. Способ по любому из пп. 1-6, в котором для вычисления промежуточной реконструкции СВСТ и определения корректирующих геометрических преобразований выполняют итерации, при этом скорректированную оценку геометрии проекций после каждой итерации используют как новую начальную оценку геометрии проекций для следующей итерации, и конечная скорректированная оценка геометрии проекций соответствует скорректированной оценке геометрии проекций последней примененной итерации.
8. Машиночитаемый носитель, содержащий компьютерную программу, содержащую компьютерный программный код, сконфигурированный для выполнения способа по любому из пп. 1-7 при его выполнении в вычислительном устройстве.
9. Устройство для коррекции перемещения пациента для конусно-лучевой компьютерной томографии (СВСТ), содержащее:
по меньшей мере один процессор (112), сконфигурированный для выполнения компьютерных программ; и
по меньшей мере один модуль памяти (113), сконфигурированный для хранения компьютерных программ и связанных с ними данных;
отличающееся тем, что это устройство выполнено с возможностью подключения к медицинскому устройству формирования изображений и сконфигурировано для выполнения способа по любому из пп. 1-7.
| US 2006058620 A1, 16.03.2006 | |||
| US 2007127792 A1, 07.06.2007 | |||
| US 2003233123 A1, 18.12.2003 | |||
| US 20110116703 A1, 03.01.2012. |

