Изобретение относится к измерительной технике, в частности, к средствам измерения деформации элементов конструкции устройств, предпочтительно дельта-робота, проявляющейся только в процессе его движения.
Известно устройство для измерения деформации конструкции, которое содержит канал, передатчик, подключенный к первому концу канала, приемник, подключенный ко второму концу канала, и контроллер. Канал является деформируемым, контроллер дает команду передатчику передать сигнал, а приемнику - зафиксировать одно или несколько измерений переданного сигнала, и определяет изгиб канала на основе одного или нескольких измерений. В одном варианте осуществления передатчик представляет собой источник света, канал представляет собой оптическое волокно, а приемник представляет собой фотодиод. При этом канал сделан из материала, показатель преломления которого изменяется в зависимости от приложенного механического напряжения. Устройство измерения деформации может также включать поляризатор, расположенный между передатчиком и каналом, и волновую пластину, расположенную между каналом и приемником (US 10429210 В1, 01.10.2019).
Известно техническое решение, согласно которому в устройстве предусмотрена система обнаружения деформации объекта на основе лазерных измерений. Система обнаружения деформации содержит блок лазерного излучения, блок униформизации света, блок фильтрации света, блок конденсации света, блок фотоэлектрического преобразования, блок преобразования сигнала, блок анализа и обработки сигнала, блок хранения, блок отображения и блок ввода. Система обнаружения деформации проецирует световую полосу в положение, перпендикулярное контуру измеряемого объекта. Блок фотоэлектрического преобразования используется для приема световой полосы, так что одна часть света световой полосы блокируется измеряемым объектом, другая часть света проецируется на блок фотоэлектрического преобразования, выводится электрический сигнал, затем деформация измеряемого объекта рассчитывается в соответствии с изменением электрического сигнала, после чего сохраняется и отображается. Техническое решение обеспечивает систему обнаружения деформации объекта, основанную на лазерном измерении, которая повышает точность и эффективность защиты от помех при измерении деформации объекта (CN 209147939 U, 23.07.2019).
К наиболее близким к представленным техническим решениям относится устройство для измерения смещения, деформации и/или силы деформации механического компонента. Устройство содержит средства для излучения и приема светового луча, при этом вышеупомянутые средства механически объединены с общим основанием. Также предусмотрены средства оптической передачи, которые перехватывают световой луч, обеспечивая его передачу (FR 2599138 А1, 27.11.1987).
Основным недостатком указанных технических решений является трудоемкость их реализации, в связи с необходимостью использования сложного и дорогостоящего оборудования.
Задачей, на решение которой направлено предлагаемое изобретение, является разработка способа определения деформации элементов конструкции дельта-робота, которая проявляется непосредственно во время его движения, свободного от вышеуказанных недостатков.
Технический результат, достигаемый при решении поставленной задачи, заключается в создании высокоэффективного, общедоступного способа определения деформации элементов конструкции дельта-робота, проявляемой только в процессе его движения, не предусматривающего использование сложного и дорогостоящего оборудования при его реализации.
Для достижения указанного технического результата предложен способ определения деформации элементов конструкции дельта-робота, проявляющейся только в процессе его движения, согласно которому предварительно на одну сторону элемента конструкции устанавливают источник лазерного света, на другую сторону элемента конструкции устанавливают сетку из фотодиодов, причем источник лазерного света и сетку из фотодиодов устанавливают так, что при отсутствии деформации элемента конструкции источник лазерного света направлен точно в центр сетки из фотодиодов, после чего осуществляют движение дельта-робота, непосредственно в процессе которого определяют расположение источника лазерного света относительно центра сетки из фотодиодов, в случае обнаружения смещения источника лазерного света относительно центра сетки из фотодиодов делают вывод о наличие деформации элемента конструкции.
При реализации способа возможно использование сетки из фотодиодов, состоящей из 4 сегментов.
В качестве элемента конструкции можно использовать верхний рычаг робота.
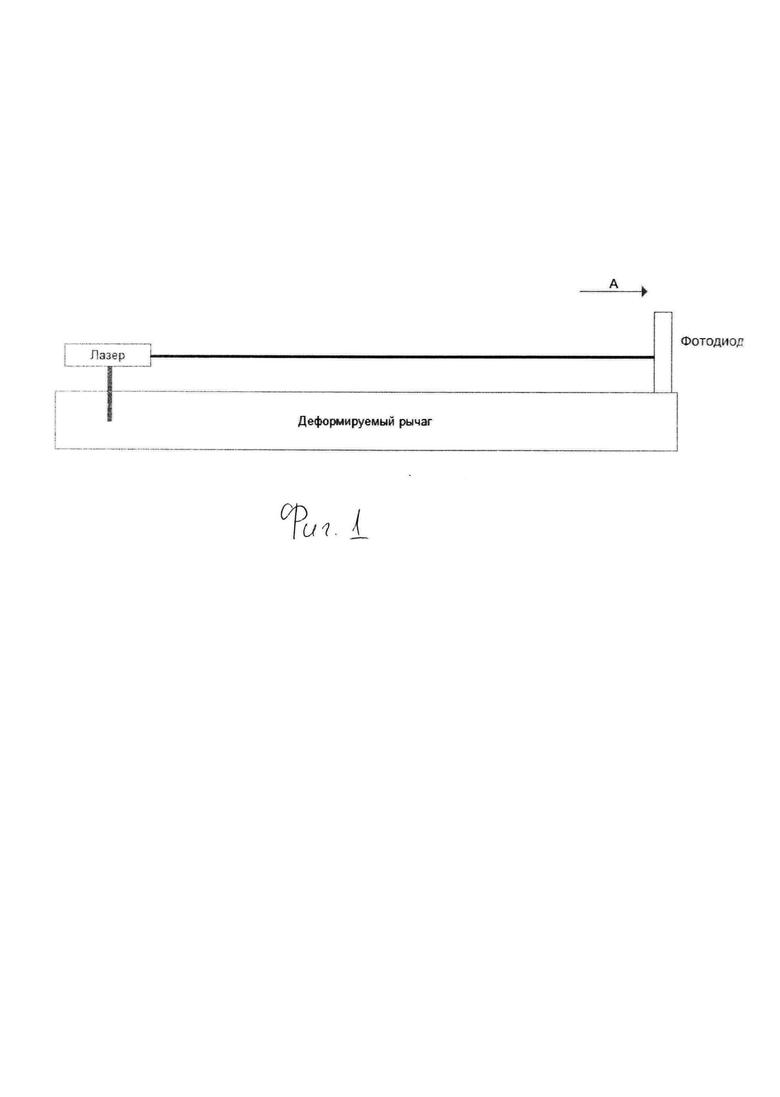
На фиг. 1 представлено схематичное изображение устройства, предназначенного для реализации представленного способа определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения.
Реализация данного способа определения деформации элементов конструкции дельта-робота, которая проявляется только в процессе его движения, будет рассмотрена на примере деформации верхних и нижних рычагов дельта-робота.
Дельта-робот - это высокоскоростное оборудование, которое перемещает каретку. При этом ускорения на каретке могут достигать 15g, т.е. во время движения дельта-робота его рычаги (как верхние, так и нижние) испытывают значительные нагрузки, результатом которых является их деформация. В связи с этим существует необходимость ее своевременного выявления и измерения, поскольку наличие деформации рычагов влияет на точность позиционирования, т.к. если рычаг незначительно изогнулся, то геометрическая конфигурация дельта-робота изменилась, и положение каретки будет отличаться от расчетного положения.
Предварительно на верхний рычаг с одной стороны крепится источник лазерного света, т.е. луч-точка, на другой стороне рычага устанавливают сетку из фотодиодов, предпочтительно состоящую из 4 одинаковых сегментов. Источник лазерного света и сетку из фотодиодов устанавливают так, что при отсутствии деформации рычага луч-точка направлен четко в центр сетки из фотодиодов. Луч-точка, попадая на все 4 сектора фотодиода, вырабатывает на них одинаковый сигнал (одинаковое выходное напряжение).
После того как необходимое оборудование установлено, к примеру, на верхнем рычаге дельта-робота, робот (следовательно, и его верхний рычаг) приводится в движение. Непосредственно в процессе которого определяют расположение луча-точки относительно центра сетки из фотодиодов. В случае если, к примеру, во время движения фотодиодная матрица сместится вниз относительно луча, а пятно от лазера окажется выше исходной точки, то это означает, что рычаг изогнулся вниз.
Предложенный способ позволяет снимать сигналы с любой частотой и не требует дополнительных вычислений.
Далее приведен конкретный пример применения способа. При этом специалисту в данной области техники очевидно, что данный пример приведен только как один из вариантов реализации предложенного способа и не может считаться единственно возможным вариантом для осуществления.
Предположим, что на максимальном ускорении робота на рычаг действует изгибающая сила в 50 Н (в том случае если 3 рычага перевозят груз 1 кг с ускорением 15g, требуемая суммарная сила составляет 150 Н, но поскольку рычага три, то на каждый рычаг приходится приблизительная сила в 50 Н).
Статические испытания показывают, что при таком усилии рычаг может выгибаться до 5 мм.
Если отклонение 5 мм, то достаточно разрешающей способности метода в 0,5 мм.
Далее рассчитывают площадь фотодиода.
Устанавливают погрешность измерения сигнала светодиодов 10%.
Необходимо обеспечить возможность отличить два сигнала, получаемых при смещении луча на 0,5 мм. Типовой диаметр лазерного луча - 3 мм. Соответственно, при сдвиге луча на 0,5 мм должно быть значимое изменение сигнала с фотодиода. Таким образом, увеличение площади засвеченного участка должно быть более 10% от общей площади фотодиода (в виду погрешности измерения).
Далее нужно рассчитать, как изменится площадь засвеченного участка при сдвиге луча на 0,5 мм.
Для чего используют формулу dS=D * delta / 2, где
dS - искомое изменение площади, мм2;
D - диаметр луча, мм;
Delta - сдвиг, мм.
Соответственно, при сдвиге 0.5 мм: dS=3 * 0,5 / 2=0,75 мм2.
Таким образом, площадь фотодиода должна быть 0,75 / 10%=0,75 / 0,1=7.5 мм2, что соответствует квадрату со стороной размером 2.7 мм.
Все выше представленное подтверждает, что данное изобретение обеспечивает создание высокоэффективного, общедоступного способа определения деформации элементов конструкции дельта-робота, которая проявляется только в его движении, который не предусматривает использование сложного и дорогостоящего оборудования при его реализации.
Изобретение относится к области робототехники и может быть использовано для определения деформации рычага дельта-робота при его движении. Способ включает предварительную установку на один из концов указанного рычага, устанавливают источник лазерного света с диаметром лазерного луча 3 мм, а на другой конец рычага устанавливают состоящую из четырех одинаковых сегментов сетку из фотодиодов так, что при отсутствии деформации рычага лазерный луч направлен в центр указанной сетки, а при движении дельта-робота контролируют расположение лазерного луча относительно центра сетки из фотодиодов, при этом при обнаружении смещения лазерного луча относительно указанного центра сетки фотодиодов определяют изменение площади засвеченного участка на сетке, причем если площадь засвеченного участка фотодиода увеличивается более чем на 10%, то по ее величине определяют показатель деформации указанного рычага. Использование изобретения позволяет упростить процесс определения деформации рычага во время движения и повысить точность измерения деформации. 1 ил.
Способ определения деформации рычага дельта-робота при его движении, характеризующийся тем, что предварительно на один из концов указанного рычага устанавливают источник лазерного света с диаметром лазерного луча 3 мм, а на другой конец рычага устанавливают сетку из фотодиодов, состоящую из четырех одинаковых сегментов, причем указанную сетку устанавливают так, что при отсутствии деформации рычага лазерный луч направлен в центр указанной сетки, а при движении дельта-робота контролируют расположение лазерного луча относительно центра сетки из фотодиодов, при этом при обнаружении смещения лазерного луча относительно указанного центра сетки фотодиодов определяют изменение площади dS засвеченного участка на сетке по соотношению:
dS=D*delta/2,
где D - диаметр лазерного луча, мм,
delta - величина сдвига луча, мм,
причем если площадь засвеченного участка фотодиода увеличивается более чем на 10%, то по ее величине определяют показатель деформации указанного рычага.
| CN 106363605 A, 01.02.2017 | |||
| Способ повышения точности позиционирования промышленного робота | 2017 |
|
RU2671787C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ФОРМЫ ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2011 |
|
RU2474787C1 |
| JPH 08157188 A, 18.06.1996 | |||
| CN 104634244 A, 20.05.2015 | |||
| CN 209468052 U, 08.10.2019. | |||

