Изобретение относится к средствам измерения относительной продольной деформации на поверхности материальных тел.
Наиболее остро вопрос о способе высокоточного измерения относительной деформации возникает в связи с необходимостью калибровки различного рода тензодатчиков. Для этой цели создаются специализированные стенды, которые с различной степенью точности воспроизводят необходимый уровень относительной продольной деформации поверхности. Если считать, что метрологические организации должны располагать эталонными средствами, обеспечивающими метрологически подтвержденную точность определения относительной деформации на уровне 10-4, то при «чистом изгибе» балки толщиной 40 мм (государственный эталон относительной деформации [1]) длина измерительной базы не должна превышать величину 40-50 мм. При максимальном значении относительной деформации в пределах упругости на уровне 0,003 абсолютное значение деформации составит ±150 мкм, при этом погрешность измерения приращений должна быть не более ±0,015 мкм. С целью воссоздания калиброванного значения относительной деформации растяжения-сжатия применяются стенды для получения так называемого эталона «чистого изгиба». Под чистым изгибом при этом понимают такой изгиб стержня (балки) постоянного сечения, при котором на ограниченном отрезке такой балки изгибающий момент имеет постоянное значение при отсутствии продольных и поперечных сил, а также крутящего момента.
Анализ существующих в мире образцовых стендов показывает, что ни один из известных не гарантирует высокой точности обеспечения чистого изгиба. Одной из причин этого является отсутствие прецизионных приборов для измерения относительной деформации, которые могли бы подтвердить наличие постоянной по длине рабочего отрезка балки и определяемой с необходимой точностью относительной деформации. Но даже в случае предположительно строгого методического обеспечения чистого изгиба определение истинного значения относительной деформации поверхности балки невозможно ввиду отсутствия соответствующих измерительных средств.
Средства измерения деформации можно разделить на следующие основные группы:
- тензорезисторы разных типов;
- тензодатчики;
- световолоконные датчики деформации на основе эффекта селективного отражения света от брэгговских решеток;
- лазерные приборы для измерения деформации на основе использования эффекта кинетики «спекловой» структуры отраженного светового потока;
- приборы, регистрирующие взаимные перемещения специально созданных на поверхности референтных «знаков», которые получают приклеиванием на эту поверхность (отражающие полоски из пленочного материала), освещаемых при помощи лазера;
- экстензометры, приборы, вводимые в механический контакт с деформируемым объектом посредством опорных заостренных ножей (инденторов), механически не нагружающих объект, регистрирующие взаимные микроперемещения заданных точек.
Известен экстензометр «Epsilon» [2], выбранный за прототип как устройство, а также как прибор, осуществляющий способ измерения относительной продольной деформации поверхности посредством референтных тел. Входящие в его состав инденторы и являются теми референтными телами, микроперемещения которых с некоторой точностью отражают микроперемещения выбранных материальных точек на деформируемой поверхности, определяющих длину базового отрезка. К деформируемой поверхности прикладывают с некоторым усилием два заостренных индентора, деформацию при этом определяют как изменение расстояния между этими точками.
При этом основные проблемы экстензометра «Epsilon» заключаются в том, что передача взаимных перемещений острия инденторов осуществляется с помощью рычагов, подверженных различного рода деформациям, а также в том, что определить координаты выбранных точек на деформируемой поверхности с необходимой точностью не представляется возможным, в том числе из-за структурной неоднородности деформируемого материала [3].
Таким образом, главным недостатком экстензометра «Epsilon» является принципиальная невозможность достижения указанного ниже технического результата.
Задачей изобретения является создание измерительного средства, исключающего влияние кинематических погрешностей и позволяющего достичь высокой степени референтности «знаков» (тел, поверхностей) по отношению к выбранной базовой точке на контролируемой поверхности, для которой точно известно расстояние до другой базовой точки на этой поверхности.
Технический результат, достигаемый в предлагаемой группе изобретений, заключается в повышении степени точности определения координат выбранных базовых точек, точности измерения расстояния между острыми кромками инденторов (референтными телами) и их взаимных перемещений из-за деформации поверхности, в том числе с учетом структурной неоднородности деформируемого материала.
Указанный технический результат при осуществлении группы изобретений по способу достигается тем, что в способе измерения относительной продольной деформации поверхности типа «растяжение-сжатие» на деформируемой поверхности фиксируют два референтных тела в виде заостренных инденторов, причем расстояние «А» между острыми кромками двух инденторов измеряют до установки на поверхность, один из инденторов - подвижный, а другой - жестко связан с корпусом прибора, прикладывают заданное усилие деформации, при помощи координатно-измерительного средства измеряют относительное перемещение референтных тел и вычисляют относительную продольную деформацию поверхности, при этом согласно изобретению подвижный индентор выполняют с оптическим референтным элементом, например, в виде сферического зеркала, центр кривизны которого совмещен с острием индентора, жестко устанавливают их на маятнике, имеющем одну степень свободы в плоскости измерения деформации, маятник арретируют, подключают источник света в виде лазера, мнимый фокус луча которого также совмещают с острием подвижного индентора, при этом изображение фокальной точки лазерного луча, отраженного от сферического зеркала, с оптическим увеличением «К» фокусируют в виде светового пятна в положении, соответствующем среднему положению светового пятна, например, на фотодиодной линейке, и регистрируют условно нулевую координату «Б» энергетического центра светового пятна, после чего в заарретированном состоянии устанавливают экстензометр с некоторым усилием, исключающим проскальзывание, заостренными инденторами на деформируемую поверхность, разарретируют маятник, далее поджимают маятник с подвижным индентором и сферическим зеркалом к деформируемой поверхности посредством электромагнита, подвешенного на рамке с плоской пружиной между подвижным и неподвижным инденторами, чем обеспечивают заданное усилие прижатия, после чего регистрируют координату энергетического центра светового пятна «В», нагружают деформируемую балку и после нагружения регистрируют координату энергетического центра светового пятна «Г», и относительную продольную деформацию вычисляют по формуле:
ε=(Г-В)/К(А+(В-Б)/К).
Совмещение центра кривизны сферического зеркала с острием индентора и жесткая установка их на маятнике делают систему референтных тел нечувствительной к изгибным деформациям маятника.
Установка маятника с одной степенью свободы обеспечивает подвижность референтного тела в заданной плоскости измерений.
Применение лазера позволяет использовать так называемый «оптический рычаг», исключающий кинематические погрешности.
Применение электромагнита, подвешенного на плоской пружине, обеспечивает постоянство усилия прижатия инденторов к контролируемой поверхности.
Арретирование маятника с референтными телами позволяет осуществить перенос (компарирование) размера базового отрезка «А» с прецизионного измерителя этой величины на деформируемую поверхность.
Указанный технический результат при осуществлении группы изобретений по устройству достигается тем, что экстензометр для измерения относительной продольной деформации поверхности типа «растяжение-сжатие» содержит два референтных тела в виде заостренных инденторов, установленных на контролируемой поверхности, при этом один индентор жестко связан с корпусом прибора, другой установлен с возможностью перемещения относительно корпуса, а также систему передачи этих перемещений в виде координатно-измерительного средства, при этом согласно изобретению в корпусе прибора дополнительно установлены лазер в качестве источника света с оптической системой коллимации излучения, фокусирующая линза, фокус которой совпадает с контролируемой поверхностью, светоделительное зеркало, например, фотодиодная линейка с блоком управления, при этом подвижный индентор выполнен с оптическим референтным элементом в виде сферического зеркала, центр кривизны которого совмещен с острием индентора и с контролируемой поверхностью, и жестко установлен на шарнирно подвешенном в верхней части корпуса маятнике, между подвижным и неподвижным инденторами посредством плоской пружины с закрепленной на ней рамкой подвешен электромагнит, в корпусе также установлен арретир для маятника в виде подвижного упора и прижимной пружины.
Устройство отличается тем, что оптический референтный элемент выполнен в виде цилиндрического зеркала.
Наличие лазера обеспечивает получение коллимированного пучка светового излучения и позволяет исключить кинематические погрешности прибора.
Наличие оптического референтного элемента в виде сферического или цилиндрического зеркала позволяет изготовить прибор практически с любой необходимой точностью отражающей поверхности, что позволяет свести кинематические погрешности к практически сколь угодно малой величине.
Совмещение центра кривизны оптического референтного элемента с острием подвижного индентора и их жесткая установка на маятнике делают систему нечувствительной к изгибным деформациям маятника.
Наличие маятника решает одну из важнейших задач по защите измерительной системы от влияния практически любых механических деформаций элементов конструкции при обеспечении подвижности референтного тела в плоскости измерений.
Наличие электромагнита с рамкой, закрепленной на плоской пружине, обеспечивает фиксацию корпуса экстензометра в плоскости, перпендикулярной плоскости симметрии.
Наличие плоской пружины обеспечивает постоянство усилия прижатия инденторов к контролируемой поверхности.
Наличие арретира позволяет осуществить точный перенос (компарирование) размера базового отрезка «А» с прецизионного измерителя этой величины на деформируемую поверхность.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, и выявление источников, содержащих сведения об аналогах изобретений, позволил установить, что заявитель не обнаружил аналоги, характеризующиеся признаками, тождественными всем существенным признакам способа и устройства. Выбор прототипа позволил выявить совокупность существенных отличительных признаков устройства, не известных из уровня техники и не вытекающих для специалиста явным образом из известного уровня техники. Заявитель считает, что заявляемое изобретение соответствует условиям «новизна» и «изобретательский уровень», а также «промышленная применимость».
Изобретение представлено на следующих чертежах.
Фиг.1 - общая компоновка экстензометра.
Фиг.2 - вариант структуры измерительного средства для прецизионного контроля базового отрезка А.
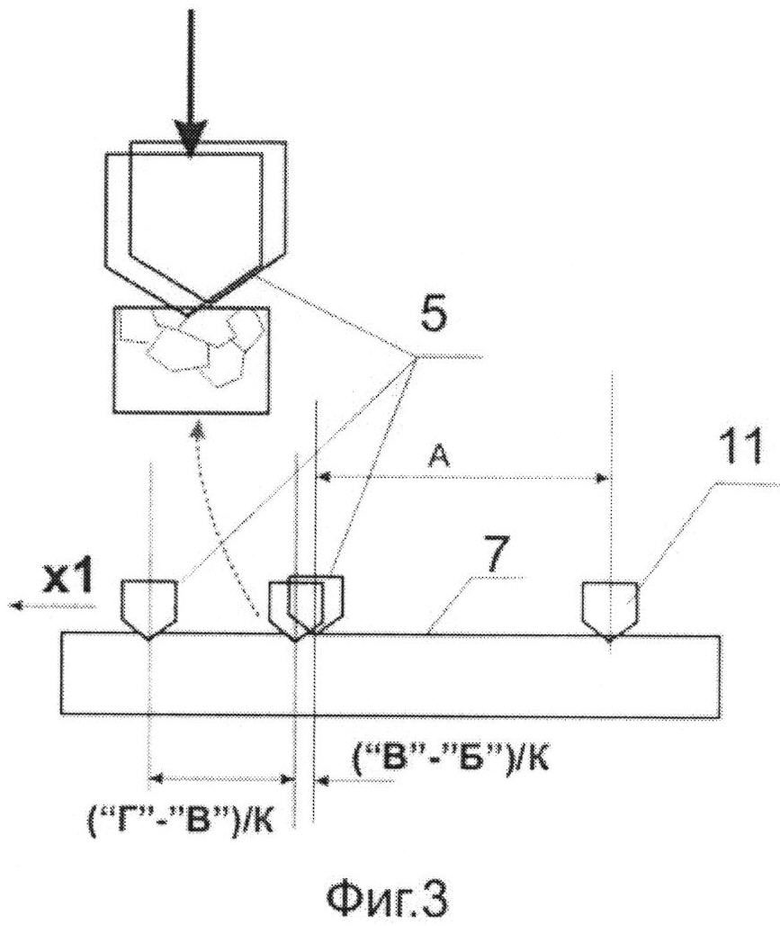
Фиг.3 - схема, поясняющая влияние неоднородности микроструктуры на точность измерения.
Предлагаемый экстензометр (фиг.1) состоит из следующих основных частей и элементов. В корпусе 1 размещен источник света в виде лазера 2 с коллимирующей линзой, входящей в его состав, маятник 3, в нижней части которого жестко закреплено сферическое зеркало 4, геометрический центр которого совпадает с острием индентора 5, также жестко связанным с маятником 3, а верхняя часть маятника 3 шарнирно подвешена на корпусе 1. Маятник 3 имеет вторую точку опоры на его конце, противоположном индентору 5, относительно которой он имеет одну степень свободы в плоскости измерения деформации. В корпусе 1 жестко установлена фокусирующая линза 6, фокус которой совпадает с контролируемой поверхностью 7, а также светоделительное зеркало 8, линза 9 и координатно-чувствительный фотоэлектрический преобразователь 10 в виде фотодиодной линейки с блоком управления. На корпусе 1 также жестко закреплен второй индентор 11 - неподвижный. Между подвижным и неподвижным инденторами установлен электромагнит 12, подвешенный на рамке 13 посредством плоской пружины 14 с защемленным на ней верхним концом рамки, благодаря чему не возникают тангенциальные силы взаимодействия между электромагнитом и инденторами. В корпусе 1 также установлен арретир для маятника 3, состоящий из подвижного упора 15 и прижимной пружины 16.
Рассмотренный выше экстензометр работает следующим образом.
Устанавливают экстензометр с предварительно измеренным при помощи, например, дополнительного прецизионного прибора расстоянием между инденторами «А» и с заарретированным маятником 3 на эталонную балку и фиксируют на ее поверхности 7 подвижный 5 и неподвижный 11 инденторы. Включают лазер 2, в заарретированном состоянии маятника 3 фиксируют изображение фокальной точки лазерного луча на фотодиодной линейке 10 и регистрируют условно нулевую координату «Б». Далее разарретируют маятник 3 и поджимают его к деформируемой поверхности 7 посредством электромагнита 12. Регистрируют полученную координату энергетического центра светового пятна «В». Нагружают балку, т.е. деформируют ее по типу «чистого изгиба», и создают тем самым на ее поверхности растяжение или сжатие, регистрируют координату светового пятна «Г», полученную после деформации, и вычисляют абсолютную и относительную деформации.
Предлагаемый способ измерения относительной продольной деформации поверхности осуществляют следующим образом.
Для достижения высокой точности измерения относительной деформации необходимо заранее знать точное значение величины «А», для чего требуется измерительное средство, позволяющее с высокой точностью измерить расстояние между острыми кромками двух инденторов.
На схеме (фиг.2) представлен вариант структуры дополнительного измерительного средства для прецизионного контроля базового отрезка «А»: лазер 19 с коллимирующей линзой, подвижный 5 и неподвижный 11 инденторы калибруемого экстензометра, два фотодиода 20 и 20а, электрический блок 21, служащий для индикации разности фототоков указанных фотодиодов. Чем лучше сфокусирован световой пучок на острие индентора, грани которого зеркально отражают световой поток, тем больше чувствительность такой системы к положению острия индентора по оси XI. Наиболее точно измерить расстояние между инденторами можно при помощи лазерного интерферометра 22, установленного на основании 23 с направляющими 24 и механизмом 25 перемещения экстензометра, а также фотоэлектрического микроскопа (не показан). Измеряют базовый отрезок «А» между остриями инденторов 5 и 11 в заарретированном состоянии маятника 3.
Полученный таким образом заранее результат измерения расстояния «А» между остриями инденторов вводится в память вычислителя в составе блока управления. Устанавливают экстензометр на контролируемую поверхность 7 эталонной балки так, чтобы оба индентора были расположены на одной прямой, лежащей в плоскости предстоящего изгиба. В случае, когда контролируется немагнитный материал балки, следует на поверхности 7 тем или иным способом закрепить стальную пластинку. Наличие плоской пружины 14 при этом обеспечивает постоянство усилия прижатия инденторов 5 и 11.
Коллимированный (параллельный) пучок светового излучения лазера 2 направляют через светоделительное зеркало 8 и фокусируют линзой 6 на контролируемой поверхности 7. Оптический референтный элемент в виде зеркала 4 (сферического или цилиндрического), жестко соединенный с индентором 5 и маятником 3, фиксируют при помощи арретира 15-16, при этом световой пучок, отраженный от оптического референтного элемента и от светоделительного зеркала 8, фокусируют линзой 9 в средней части фотодиодной линейки 10, фотоэлектрический сигнал которой преобразуется в координату энергетического центра светового пятна в системе координат линейки Х2 при помощи электронного блока, входящего в структуру фотодиодной линейки 10. При помощи вычислителя, входящего в состав блока управления фотодиодной линейкой, регистрируют условно нулевую координату «Б» энергетического центра светового пятна.
Любой конструкционный материал имеет зернистую структуру, особенно хорошо наблюдаемую в микроскоп, при условии подготовки поверхности путем шлифовки, полировки и травления. Для сталей такой важный параметр, как микротвердость, может изменяться на порядок от зерна к зерну (перлит - цементит). Это обстоятельство может быть источником дополнительной погрешности из-за того, что при малых контактных усилиях между инденторами и материалом, когда площадь контакта индентора меньше размера зерна, острие индентора может смещаться в сторону зерна с меньшей твердостью, вследствие чего изменяется расстояние между инденторами «А» (фиг.3).
Проведенными многочисленными исследованиями установлено, что универсальная твердость имеет нестабильный, скачкообразный характер изменения особенно в области малых нагрузок. Примером этому могут служить данные, представленные в источнике информации [3], где универсальная твердость имеет не только скачкообразный характер в области малых нагрузок, но и противоположный характер изменения твердости с ростом нагрузки в зависимости от типа индентора (конус, пирамида или шарик). При использовании в качестве инденторов конусов твердосплавного, алмазного, пирамиды Виккерса твердость имела высокие значения при малых нагрузках.
После регистрации координаты светового пятна «Б» производят разарретирование маятника и включают электромагнит 12, фиксирующий экстензометр на контролируемой магнитопроводящей поверхности 7. Вследствие этого оба индентора с определенным усилием оказываются прижатыми к поверхности балки. При этом вследствие микронеоднородности материала балки есть вероятность изменения длины базового отрезка «А»: в результате возможного смещения обоих инденторов световое пятно на фотоприемнике сместится на некоторую величину ΔХ2. После этого определяется новая координата «В» светового пятна на фотоприемнике, что позволяет вычислить разность между второй и первой координатой (В-Б). При возникновении контролируемой продольной деформации поверхности в режиме чистого изгиба подвижный индентор 5 с зеркалом 4 смещаются на величину ΔX1, а энергетический центр светового пятна на фотоприемнике приобретет координату «Г», позволяющую вычислить перемещение подвижного индентора в результате нагрузки (Г-В)/К (фиг.3).
Масштабный коэффициент «К» отношения перемещения ΔХ2 по оси чувствительности фотоэлектрического преобразователя Х2 к перемещению ΔХ1 индентора по оси X1 определяется как К=ΔХ2/ΔX1.
Величина относительной деформации «ε» в первом приближении всегда вычислялась как ε=ΔХ1/А.
В предлагаемом изобретении величину относительной продольной деформации поверхности типа «растяжение-сжатие» возможно вычислить с повышенной степенью точности определения координат выбранных базовых точек, высокой точностью измерения расстояния между острыми кромками инденторов (референтными телами) и высокой точностью их взаимных перемещений из-за деформации поверхности, в том числе с учетом структурной неоднородности деформируемого материала по предложенной автором формуле: ε=(Г-В)/К(А+(В-Б)/К), что и позволяет решить поставленную задачу и достичь указанного технического результата.
Источники информации
1. http://standartgost.ru/%D0%93%D0%9E%D0%A1%D0%A2%208.543-86
2. http://www.scan-group.ru/devices/testing_devices/Epsilon_extensometers/
3. Научная библиотека КиберЛенинка: http://cyberleninka.ru/article/n/istoriya-sovremennye-dostizheniya-i-perspektivy-razvitiya-tverdometrii#ixzz2H0aSoJhn
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ЛОКАЛЬНОГО РАДИУСА КРИВИЗНЫ УПРУГОДЕФОРМИРОВАННОЙ ЭТАЛОННОЙ БАЛКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2581440C1 |
| Способ формирования размеров светового пятна на динамическом объекте и устройство для его осуществления | 2018 |
|
RU2713128C1 |
| Устройство для контроля прямолинейности рельсовых путей | 1988 |
|
SU1576616A1 |
| СПОСОБ ГЕОДЕЗИЧЕСКИХ ИЗМЕРЕНИЙ ИНЖЕНЕРНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2523751C2 |
| ДИФРАКЦИОННЫЙ ИНТЕРФЕРОМЕТР (ВАРИАНТЫ) | 2003 |
|
RU2240503C1 |
| СПОСОБ МОНИТОРИНГА ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ КОЛЕСНОЙ ПАРЫ И ЕЕ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОТНОСИТЕЛЬНО ПУТИ | 2000 |
|
RU2180300C1 |
| СКАНИРУЮЩИЙ ИНТЕРФЕРОМЕТР ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ | 2002 |
|
RU2264595C2 |
| СПОСОБ ИНТЕРФЕРОМЕТРИЧЕСКОГО ИЗМЕРЕНИЯ ОТКЛОНЕНИЯ ФОРМЫ ОПТИЧЕСКИХ ПОВЕРХНОСТЕЙ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2263279C2 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОТКЛОНЕНИЙ ОТДЕЛЬНЫХ УЧАСТКОВ ПОВЕРХНОСТЕЙ ОБЪЕКТОВ ОТ РЕФЕРЕНТНОГО НАПРАВЛЕНИЯ | 2007 |
|
RU2359224C2 |
| Устройство для измерения сложной поверхности | 1987 |
|
SU1529038A1 |

Изобретение относится к средствам измерения относительной продольной деформации на поверхности материальных тел. Экстензометр содержит два референтных тела в виде заостренных инденторов, при этом один индентор жестко связан с корпусом прибора, другой установлен с возможностью перемещения, а также систему передачи этих перемещений. В корпусе прибора дополнительно установлены лазер с оптической системой коллимации излучения, фокусирующая линза, фокус которой совпадает с контролируемой поверхностью, светоделительное зеркало, линза, координатно-чувствительный фотоэлектрический преобразователь и арретир для маятника. Подвижный индентор выполнен с оптическим референтным элементом, центр кривизны которого совмещен с острием индентора и с контролируемой поверхностью, и жестко установлен на шарнирно подвешенном в верхней части корпуса маятнике. Между подвижным и неподвижным инденторами подвешен электромагнит. Сущность: расстояние «А» между острыми кромками двух инденторов измеряют до установки на поверхность. Маятник арретируют, подключают источник света, мнимый фокус луча которого совмещают с острием подвижного индентора, при этом изображение фокальной точки лазерного луча, отраженного от сферического зеркала, с оптическим увеличением «К» фокусируют в положении, соответствующем среднему положению светового пятна на координатно-чувствительном фотоэлектрическом преобразователе, и регистрируют условно нулевую координату «Б» энергетического центра светового пятна. В заарретированном состоянии устанавливают экстензометр на деформируемую поверхность и разарретируют маятник, далее поджимают маятник с подвижным индентором и сферическим зеркалом к деформируемой поверхности посредством электромагнита. Регистрируют координату энергетического центра светового пятна «В», нагружают деформируемую балку и регистрируют координату энергетического центра светового пятна «Г». Относительную продольную деформацию вычисляют по формуле. Технический результат: повышение степени точности определения координат выбранных базовых точек, точности измерения расстояния между острыми кромками инденторов и их взаимных перемещений из-за деформации поверхности, в том числе с учетом структурной неоднородности деформируемого материала. 2 н.п. ф-лы, 3 ил.
1. Экстензометр для измерения относительной продольной деформации поверхности типа «растяжение-сжатие», содержащий два референтных тела в виде заостренных инденторов, установленных на контролируемой поверхности, при этом один индентор жестко связан с корпусом прибора, другой установлен с возможностью перемещения относительно корпуса, а также систему передачи этих перемещений в виде координатно-измерительного средства, отличающийся тем, что в корпусе прибора дополнительно установлены лазер в качестве источника света с оптической системой коллимации излучения, фокусирующая линза, фокус которой совпадает с контролируемой поверхностью, светоделительное зеркало, линза и координатно-чувствительный фотоэлектрический преобразователь в виде фотодиодной линейки с блоком управления, при этом подвижный индентор выполнен с оптическим референтным элементом в виде сферического зеркала, центр кривизны которого совмещен с острием индентора и с контролируемой поверхностью, и жестко установлен на шарнирно подвешенном в верхней части корпуса маятнике, между подвижным и неподвижным инденторами посредством плоской пружины с закрепленной на ней рамкой подвешен электромагнит, в корпусе также установлен арретир для маятника в виде подвижного упора и прижимной пружины.
2. Способ измерения относительной продольной деформации поверхности типа «растяжение-сжатие», заключающийся в том, что на контролируемой поверхности фиксируют два референтных тела в виде заостренных инденторов, причем расстояние «А» между острыми кромками двух инденторов измеряют до установки на поверхность, один из инденторов - подвижный, а другой - жестко связан с корпусом прибора, прикладывают заданное усилие деформации, при помощи координатно-измерительного средства измеряют относительное перемещение референтных тел и вычисляют относительную продольную деформацию поверхности, отличающийся тем, что подвижный индентор выполняют с оптическим референтным элементом в виде сферического зеркала, центр кривизны которого совмещают с острием индентора, жестко устанавливают их на маятнике, имеющем одну степень свободы в плоскости измерения деформации, маятник арретируют, подключают источник света в виде лазера, мнимый фокус луча которого также совмещают с острием подвижного индентора, при этом изображение фокальной точки лазерного луча, отраженного от сферического зеркала, с оптическим увеличением «К» фокусируют в виде светового пятна в положении, соответствующем среднему положению светового пятна на координатно-чувствительном фотоэлектрическом преобразователе в виде фотодиодной линейки, и регистрируют условно нулевую координату «Б» энергетического центра светового пятна, после чего в заарретированном состоянии устанавливают экстензометр с некоторым усилием, исключающим проскальзывание заостренными инденторами на деформируемую поверхность, разарретируют маятник, далее поджимают маятник с подвижным индентором и сферическим зеркалом к деформируемой поверхности посредством электромагнита, подвешенного на рамке с плоской пружиной между подвижным и неподвижным инденторами, чем обеспечивают заданное усилие прижатия, после чего регистрируют координату энергетического центра светового пятна «В», нагружают деформируемую балку, и после нагружения регистрируют координату энергетического центра светового пятна «Г», и относительную продольную деформацию вычисляют по формуле:
ε=(Г-В)/К(А+(В-Б)/К).
| Мембрана для громкоговорителей | 1929 |
|
SU13845A1 |
| Устройство для измерения перемещений поверхности объекта | 1981 |
|
SU1011505A1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО ВЫСОКОТОЧНОГО ИЗМЕРЕНИЯ ФИЗИКО-ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА | 2007 |
|
RU2353925C1 |
| JP 9101249 A 15.04.1997. | |||

