Изобретение относится к области гидроакустики и предназначено для разделения объектов, обнаруженных при шумопеленговании, на классы малошумных и сильно шумящих.
Основной характеристикой первичного гидроакустического поля кораблей является функция спектральной плотности среднего квадрата давления шума, которая на частотах выше 0,5 кГц описывается выражением вида [Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение. 1981. 265 с.]:
 ,
,
где  - уровень шума в источнике, то есть мощность шума на частоте 1 кГц, в полосе 1 Гц и расстоянии 1 м от акустического центра источника излучения, ƒ - частота, n - показатель степени, принимающий фиксированное значение.
- уровень шума в источнике, то есть мощность шума на частоте 1 кГц, в полосе 1 Гц и расстоянии 1 м от акустического центра источника излучения, ƒ - частота, n - показатель степени, принимающий фиксированное значение.
Величина  входящая в указанное выражение, является одной из характеристик модели корабля как источника акустического излучения и используется в качестве классификационного параметра для разделения морских объектов на классы малошумных и сильно шумящих. К первой категории можно отнести подводные объекты, ко второй - боевые надводные корабли и гражданские суда.
входящая в указанное выражение, является одной из характеристик модели корабля как источника акустического излучения и используется в качестве классификационного параметра для разделения морских объектов на классы малошумных и сильно шумящих. К первой категории можно отнести подводные объекты, ко второй - боевые надводные корабли и гражданские суда.
Известен способ разделения обнаруженных объектов на классы малошумных и сильно шумящих [Кобылянский В.В. Разработка алгоритмов классификации шумовых гидроакустических сигналов на основе использования акустико-конструктивных характеристик объектов излучения и моделей среды. Диссертация на соискание ученой степени к.т.н. Л.: ЦНИИ «Морфизприбор». 1982]. В способе определяют уровень шума в источнике  а затем производят процедуру дихотомической классификации путем сравнения уровня шума с порогом:
а затем производят процедуру дихотомической классификации путем сравнения уровня шума с порогом:

где С - порог, определяемый на основании статистического описания классов объектов [Кобылянский В.В. Разработка…], γ0 - класс малошумных объектов, γ1 - класс сильношумящих объектов.
В указанном способе для определения уровня шума в источнике  осуществляют пересчет мощности принятого сигнала в предполагаемую точку излучения. Для реализации способа необходимо априорное знание оценки расстояния до шумящего объекта, которая используется как параметр при пересчете. Однако оценка расстояния при шумопеленговании является отдельной сложной задачей, и она известна не всегда. В случае отсутствия оценки расстояния способ не может быть применен, и в этом заключается его недостаток.
осуществляют пересчет мощности принятого сигнала в предполагаемую точку излучения. Для реализации способа необходимо априорное знание оценки расстояния до шумящего объекта, которая используется как параметр при пересчете. Однако оценка расстояния при шумопеленговании является отдельной сложной задачей, и она известна не всегда. В случае отсутствия оценки расстояния способ не может быть применен, и в этом заключается его недостаток.
Известен способ [Зеленкова И.Д., Волкова А.А., Никулин М.Н. Патент РФ №2548400 от 20.03.2015. Способ совместной оценки дистанции до шумящего в море объекта и его шумности. МПК G01S 3/80], в котором уровень шумности и расстояние оцениваются совместно, с использованием общих процедур. Способ основан на многократном переборе возможных расстояний до шумящего объекта, в результате чего для его реализации необходимо выполнение большого количества арифметических операций, что приводит к необходимости большой вычислительной мощности.
Наиболее близким аналогом по решаемым задачам и используемым параметрам к предлагаемому изобретению является способ [Величкин С.М., Миронов Д.Д., Антипов В.А., Зеленкова И.Д., Перельмутер Ю.С. Патент РФ №2156984 от 27.09.2000. Способ получения информации о шумящем в море объекте и способ получения цветовых шкал для него. МПК G01S 3/84], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают шумовой сигнал объекта гидроакустической антенной,
осуществляют частотно-временную обработку сигнала с формированием не менее трех частотных диапазонов и определением уровня сигнала и отношения сигнал/помеха в каждом из сформированных частотных диапазонов,
кодируют уровень сигнала цветом и осуществляют индикацию его трассы;
осуществляют прогнозный расчет в сформированных частотных диапазонах акустического поля сигнала единичной мощности шумоизлучения с заданным законом спада спектра для набора прогнозных точек по расстоянию;
формируют на индикаторе цветовые шкалы по расстоянию для двух альтернативных классов путем решения уравнения гидроакустики для двух уровней шумоизлучения объектов и кодирования результатов цветом;
принимают решение о классе шумящего объекта на основании визуального сравнения цвета трассы сигнала с цветом цветовых шкал для двух классов.
Недостатком способа-прототипа является отсутствие автоматического разделения объектов на классы малошумных и сильно шумящих. Классификация производится оператором субъективно «на глаз» путем сопоставления цвета трассы сигнала с цветовыми шкалами альтернативных классов по расстоянию. При этом необходимы значительные вычислительные ресурсы для формирования цветовых шкал по расстоянию.
Задачей заявляемого способа является обеспечение автоматического разделения объектов на альтернативные классы по параметру «уровень шума в источнике» при снижении общего количества арифметических операций.
Для выполнения поставленной задачи в способ классификации морских объектов по уровню шума в источнике, по которому принимают шумовой сигнал объекта гидроакустической антенной, осуществляют частотно-временную обработку сигнала с формированием не менее трех частотных диапазонов, где ƒi - среднегеометрическая частота диапазона номер i, измеряют мощность принятого сигнала Ui и отношение сигнал/помеха qi в каждом из сформированных частотных диапазонов, и производят классификацию обнаруженного объекта на два класса,
введены новые признаки, а именно:
при формировании частотных диапазонов используют полосы октавной ширины,
определяют номер частотного диапазона I, в котором отношение сигнал/помеха максимально I=argmax{qi},
запоминают мощность принятого сигнала UI и среднегеометрическую частоту ƒI в частотном диапазоне номер I,
определяют коэффициент затухания сигнала β для текущих гидролого-акустических условий на частоте ƒI,
определяют уровень шума в источнике  на основании коэффициента затухания β, среднегеометрической частоты ƒI и мощности принятого сигнала UI в частотном диапазоне номер I по формуле
на основании коэффициента затухания β, среднегеометрической частоты ƒI и мощности принятого сигнала UI в частотном диапазоне номер I по формуле 
а классификацию обнаруженного объекта на два класса осуществляют автоматически на основании сравнения уровня шума в источнике с порогом С в соответствии с выражением  ,
,
где С - порог, определяемый на основании статистического описания классов объектов, γ0 - класс малошумных объектов, γ1 - класс сильно шумящих объектов.
Техническим результатом изобретения является достижение возможности автоматического разделения обнаруженных объектов на классы малошумных и сильно шумящих, без предварительного определения расстояния до объекта, с одновременным уменьшением общего количества арифметических операций при классификации.
Покажем возможность достижения указанного технического результата предложенным способом.
Согласно [Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение. 1981. 265 с.] для определения уровня шума в источнике  на основании которого необходимо осуществлять разделение объектов на классы малошумных и сильно шумящих, можно использовать формулу:
на основании которого необходимо осуществлять разделение объектов на классы малошумных и сильно шумящих, можно использовать формулу:
 ,
,
где Ui - мощность принятого сигнала в некоторой полосе частот со среднегеометрической частотой ƒi, r - расстояние до объекта, β - коэффициент затухания, l - показатель степени в частотной зависимости затухания сигнала. Значение l в большинстве практических случаев может быть принято равным l=3/2 [Евтютов А.П., Митько В.Б. Примеры инженерных расчетов в гидроакустике. - Л.: Судостроение. 1981. 265 с.].
Видно, что в указанное выражение входит значение расстояния до объекта r, оценка которого вызывает сложности и требует больших вычислительных ресурсов.
Однако из [Волкова А.А., Консон А.Д., Никулин М.Н. Оценка расстояния до источника шумового сигнала методом «оптимальных частот» с использованием полосовых фильтров // Гидроакустика. 2015. Вып. 22(2). С. 43-52] известно, что если разделить принятый широкополосный сигнал на несколько частотных диапазонов, то на выходе обработки в одном из этих диапазонов будет наблюдаться наибольшее значение отношения сигнала к помехе, и, при этом, среднегеометрическая частота этого диапазона связана с расстоянием до шумящего объекта следующим соотношением:
 ,
,
где ƒI - среднегеометрическая частота диапазонного фильтра, на выходе которого наблюдается максимальное значение отношения сигнала к помехе, В - коэффициент, совместно характеризующий затухание сигнала при распространении в среде и ширину частотной полосы фильтра, остальные обозначения прежние.
Подставляем выражение (3) в известное выражение (2), и получаем возможность определить уровень шума в источнике  без явного оценивания расстояния:
без явного оценивания расстояния:

Численное значение коэффициента В может быть получено из упомянутой работы [Волкова, Консон, Никулин]. Для частотных диапазонов октавной ширины при l=3/2, получим В=1.36β-2/3. Тогда для определения уровня шума в источнике  вместо (2) может быть использована формула:
вместо (2) может быть использована формула:

При использовании выражения (5), для автоматической классификации может быть использовано правило (1) без реализации сложных процедур определения расстояния, что, свою очередь, приводит к уменьшению количества арифметических операций.
Задача изобретения выполнена, технический результат достигнут.
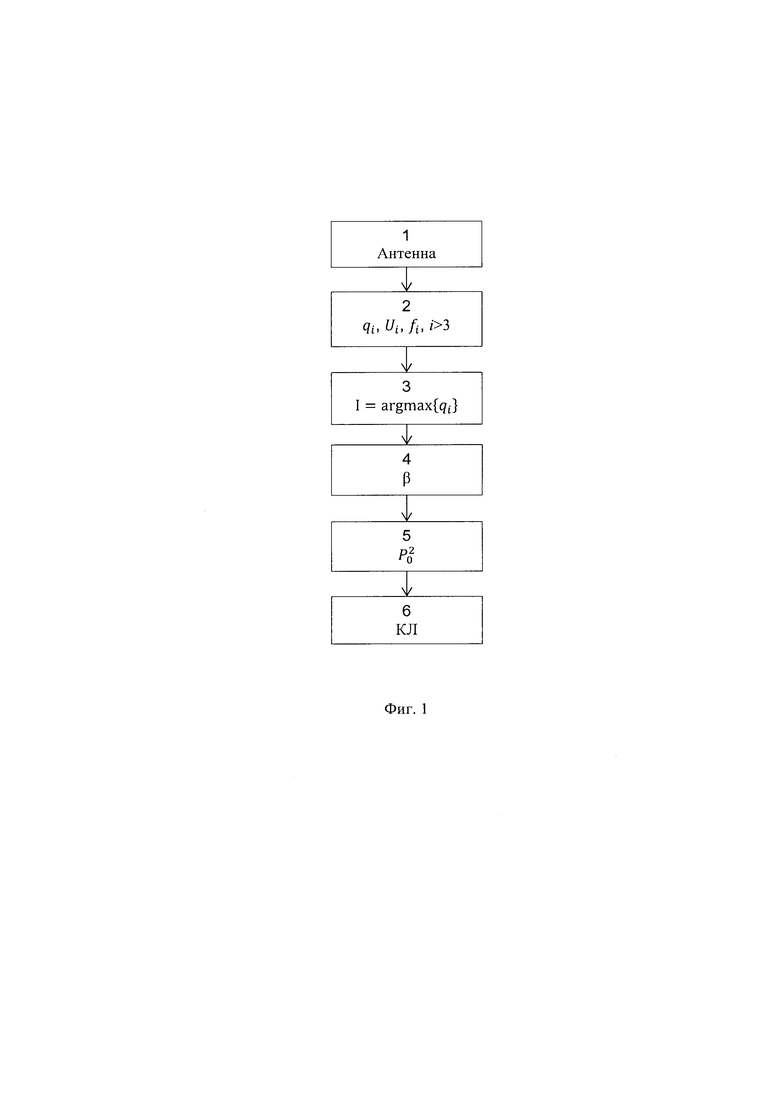
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1, в составе обобщенной структурной схемы гидроакустического канала шумопеленгования [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука. 2004]. Устройство (фиг. 1) содержит последовательно соединенные блоки: антенну 1, блок 2 частотно-временной обработки (qi, Ui, ƒi, i>3), блок 3 выбора частотного диапазона (I=argmax{qi}), блок 4 определения коэффициента частотного затухания (β), блок 5 определения уровня шума в источнике  блок 6 принятия решения о классе (КЛ).
блок 6 принятия решения о классе (КЛ).
В динамике работы гидроакустического канала шумопеленгования предлагаемый способ реализуется следующим образом.
Сигнал объекта принимается антенной 1, и поступает в блок 2, где выполняются типовые процедуры частотно-временной обработки: для совокупности не менее трех частотных диапазонов со среднегеометрическими частотами ƒi, где i - номер частотного диапазона, измеряют мощность принятого сигнала (Ui) и отношение сигнал/помеха (qi). Все измеренные значения поступают в блок 3, где осуществляется выбор частотного диапазона, в котором отношение сигнал/помеха максимально: I=argmax{qi}. Мощность сигнала в выбранном частотном диапазоне UI и среднегеометрическая частота этого диапазона ƒI поступают в следующие блоки. В блоке 4 осуществляется определение значения коэффициента частотного затухания β на частоте ƒi. Для определения β могут быть использованы методы непосредственного измерения [Глотов В.П. Метод реверберационного бака для исследования поглощения звука в море // Акустический журнал. 1958. т. IV. вып. 3. С. 239, Таранов Э.С., Тюрин A.M., Сташкевич А.П. Гидроакустические измерения в океанологии. Л.: Гидрометеоиздат.1972. С. 272] либо использованы таблицы по формулам Марша и Шулькина, которые определяют зависимость Р для выбранной частоты при измеренных температуре и солености морской среды [Урик Р.Дж. Основы гидроакустики / пер. с англ. Л.: Судостроение. 1978, Справочник по гидроакустике / Евтютов А.П., Колесников А.Е., Корепин Е.А. и др. Л.: Судостроение. 1988]. В блоке 5 осуществляется расчет уровня шума в источнике по формуле (5)  Полученное значение уровня шума в источнике из блока 5 поступает в блок 6, где осуществляется разделение объектов на классы малошумных и сильно шумящих по алгоритму (1). Объект относится к классу малошумных в случае, если уровень шума в источнике не превышает порог, и к классу сильно шумящих в противном случае.
Полученное значение уровня шума в источнике из блока 5 поступает в блок 6, где осуществляется разделение объектов на классы малошумных и сильно шумящих по алгоритму (1). Объект относится к классу малошумных в случае, если уровень шума в источнике не превышает порог, и к классу сильно шумящих в противном случае.
Все изложенное позволяет считать задачу изобретения решенной: предложен способ классификации морских объектов по уровню шума в источнике, который может быть использован в гидроакустических средствах шумопеленгования для разделения обнаруженных объектов на классы малошумных и сильно шумящих.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ классификации морских объектов на основе весовых коэффициентов их классификационных признаков | 2018 |
|
RU2687994C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ | 2015 |
|
RU2590933C1 |
| Способ классификации морских объектов в типовой шумопеленгаторной станции | 2018 |
|
RU2689968C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| Способ обработки информации в режиме шумопеленгования гидроакустического комплекса | 2022 |
|
RU2788477C1 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
Использование: изобретение относится к области гидроакустики и предназначено для разделения объектов, обнаруженных при шумопеленговании, на классы малошумных и сильношумящих. Сущность: способ применим для гидроакустической шумопеленгаторной станции, в которой осуществляют прием и частотно-временную обработку сигнала с измерением мощности и отношения сигнал/помеха не менее чем в трех частотных диапазонах. При реализации способа дополнительно выбирают частотный диапазон, в котором отношение сигнал/помеха максимально, и определяют коэффициент затухания сигнала для текущих гидролого-акустических условий. Затем определяют уровень шума в источнике на основании коэффициента затухания, среднегеометрической частоты и мощности принятого сигнала в выбранном частотном диапазоне, а классификацию обнаруженного объекта на два класса осуществляют автоматически на основании анализа уровня шума в источнике. Технический результат: достижение возможности автоматического разделения обнаруженных объектов на классы малошумных и сильношумящих, без предварительного определения расстояния до объекта, с одновременным уменьшением общего количества арифметических операций при проведении процедуры классификации. 1 ил.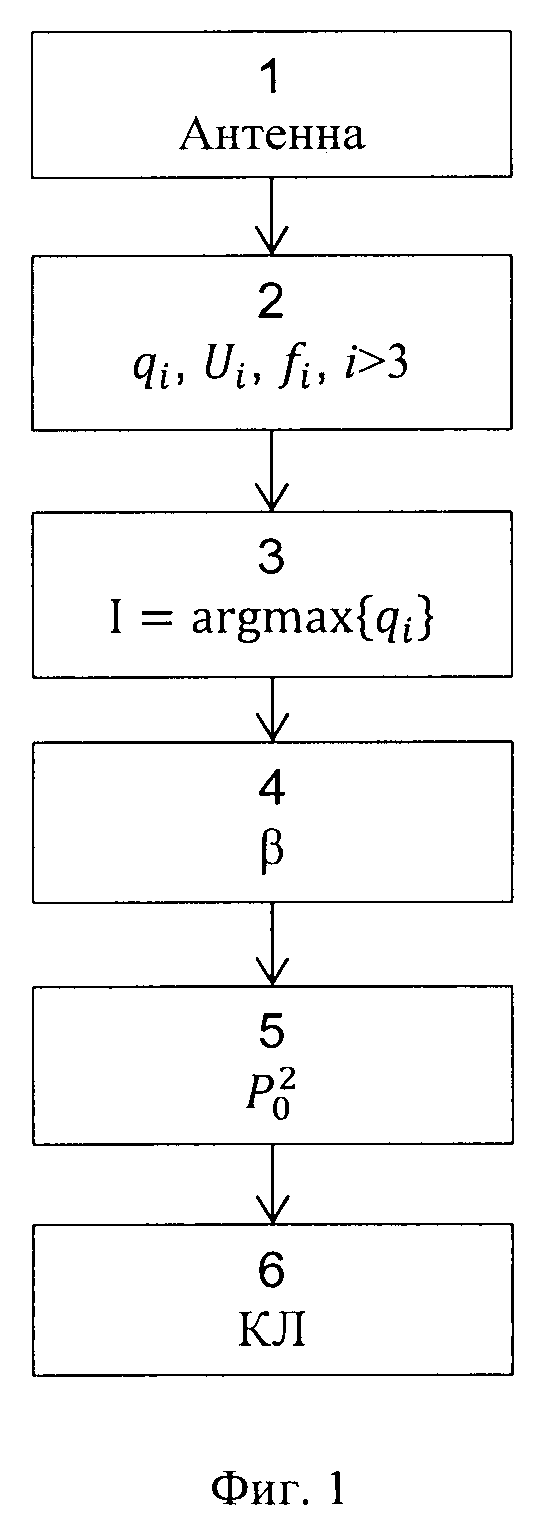
Способ классификации морских объектов по уровню шума в источнике, при котором принимают шумовой сигнал объекта гидроакустической антенной, осуществляют частотно-временную обработку сигнала с формированием не менее трех частотных диапазонов, где ƒi - среднегеометрическая частота диапазона номер i, измеряют мощность принятого сигнала Ui и отношение сигнал/помеха qi в каждом из сформированных частотных диапазонов, и производят классификацию обнаруженного объекта на два класса, отличающийся тем, что при формировании частотных диапазонов используют полосы октавной ширины, определяют номер частотного диапазона I, в котором отношение сигнал/помеха максимально I=argmax{qi}, запоминают мощность принятого сигнала UI и среднегеометрическую частоту ƒI в частотном диапазоне номер I, определяют коэффициент затухания сигнала β для текущих гидролого-акустических условий на частоте ƒI, определяют уровень шума в источнике  на основании коэффициента затухания β, среднегеометрической частоты ƒI и мощности принятого сигнала UI в частотном диапазоне номер I по формуле
на основании коэффициента затухания β, среднегеометрической частоты ƒI и мощности принятого сигнала UI в частотном диапазоне номер I по формуле  а классификацию обнаруженного объекта на два класса осуществляют автоматически на основании сравнения уровня шума в источнике с порогом С в соответствии с выражением
а классификацию обнаруженного объекта на два класса осуществляют автоматически на основании сравнения уровня шума в источнике с порогом С в соответствии с выражением
 ,
,
где С - порог, определяемый на основании статистического описания классов объектов, γ0 - класс малошумных объектов, γ1 - класс сильно шумящих объектов.
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| Способ классификации морских объектов на основе весовых коэффициентов их классификационных признаков | 2018 |
|
RU2687994C1 |
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| US 6714155 B1, 30.03.2004. | |||

