Изобретение относится к области гидроакустики и предназначено для предупреждения о возможном столкновении с морским объектом, обнаруженным по шумовому полю.
Способы предупреждения о столкновениях важны для любых движущихся технических средств. Такие способы известны и для наземных транспортных средств [Галимов А.И. Патент РФ №2724044 от 18.06.2020. Способ предупреждения о столкновении. G08G 1/16], и для летательных аппаратов [Мейер Й. и др. Патент РФ №2597047 от 20.00.2013. Беспилотный летательный аппарат со встроенной системой предупреждения о столкновениях. МПК В64С 39/00, G08G 5/04, G05D 1/12].
Для морских движущихся технических средств при использовании гидроакустики используют способы предупреждения о столкновениях, основанные на активной локации, так называемые гидролокационные станции обеспечения безопасности плавания [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука, 2004, Машошин А.И., Пашкевич И.В. Патент РФ №2725706 от 30.07.2020. Способ обзора пространства гидролокатором обеспечения безопасности плавания автономного необитаемого подводного аппарата]. Понятно, что использование активных средств, во-первых, является энергозатратным, что может быть критичным для малогабаритных аппаратов, и, во-вторых, негативно влияет на представителей морской фауны. Было бы полезно создать способ предупреждения о столкновениях в море, основанный на пассивной локации, то есть при шумопеленговании.
Наиболее близким аналогом по выполняемым процедурам к предлагаемому изобретению является способ обработки информации в режиме шумопеленгования [Справочник по гидроакустике / А.П. Евтютов, А.Е. Колесников, Е.А. Корепин и др. - 2-е изд., перераб. и доп. - Л.: Судостроение. 1988], который можно принять за прототип.
В способе-прототипе выполняются следующие операции:
принимают шумовой сигнал объекта гидроакустической антенной,
осуществляют частотно-временную обработку сигнала в нескольких частотных диапазонах с определением отношения сигнала к помехе в каждом из частотных диапазонов,
определяют направления на объект в горизонтальной плоскости и мощности сигнала в последовательные моменты времени,
определяют угловую скорость объекта,
осуществляют прослушивание сигнала.
В указанном способе отсутствует процедура проверки параметров маневрирования наблюдаемого объекта на предмет возможного столкновения с носителем шумопеленгаторной станции.
Задачей заявляемого способа является обеспечение объективной проверки обнаруженных морских объектов на опасное сближение с носителем шумопеленгаторной станции без увеличения состава измеряемых параметров сигнала.
Для решения поставленной задачи для способа обработки информации в режиме шумопеленгования гидроакустического комплекса, по которому
принимают шумовой сигнал объекта гидроакустической антенной,
осуществляют частотно-временную обработку сигнала в нескольких частотных диапазонах с определением отношения сигнала к помехе qj в каждом из частотных диапазонов j,
определяют направления на объект ϕi в горизонтальной плоскости и мощности сигнала Si в последовательные моменты времени ti,
определяют угловую скорость объекта Vϕ как Vϕ=(ϕi-ϕi-1)/(ti-ti-1),
введены новые признаки, а именно:
определяют скорость изменения мощности сигнала VS как VS=(Si-Si-1)/(ti-ti-1),
определяют номер частотного диапазона N, в котором отношение сигнала к помехе максимально N=arg maxj(qj)
и принимают решение об опасном сближении с морским шумящим объектом при совместном выполнении трех условий N>PorN и VS>PorS и |Vϕ|<Porϕ, где |Vϕ| - абсолютное значение угловой скорости объекта, PorN, PorS, Porϕ - пороговые значения для номера частотного диапазона, скорости изменения мощности сигнала и абсолютного значения угловой, соответственно.
Техническим результатом изобретения является обеспечение непрерывного контроля морских шумящих объектов на предмет их возможного опасного сближения с носителем гидроакустических средств без использования активной локации.
Покажем возможность достижения указанного технического результата предложенным способом.
Основой способа является проверка совместного выполнения трех условий, которые в совокупности позволяют принять решение об опасном сближении с шумящим объектом без использования активной локации:
- N>PorN - анализ номера частотного диапазона, в котором наблюдается максимальное значение отношения сигнала к помехе;
- |Vϕ|<Porϕ - анализ абсолютного значения угловой скорости объекта;
- VS>PorS - анализ скорости изменения мощности сигнала.
В первом условии осуществляется анализ номера частотного диапазона, в котором наблюдается максимальное значение отношения сигнала к помехе. Известно [Марасёв С.В., Машошин А.И. Оптимальная частота работы гидроакустических средств обнаружения в реальном океаническом волноводе // Фундаментальная и прикладная гидрофизика. 2016. Т. 9, №4. С. 85-92], что для объектов, находящихся близко, максимальное значение отношения сигнала к помехе будет наблюдаться в наиболее высоком частотном диапазоне. Поэтому, сравнение соответствующего номера частотного диапазона с порогом позволяет ограничить расстояние до наблюдаемого шумящего объекта и выбрать те объекты, расстояние до которых критично мало для осуществления маневра уклонения. Однако, объекты, находящиеся на малом расстоянии, могут не представлять опасность столкновения, если их траектории движения не пересекаются с траекторией движения носителя шумопеленгаторной станции. Для этого необходима проверка второго условия.
Во втором условии осуществляется анализ абсолютного значения угловой скорости объекта. Известно [Основы маневрирования кораблей. Под общей ред. М.И. Скворцова. Военное изд-во Мин. Обороны СССР. М.: 1966], что необходимым условием сближения двух маневрирующих объектов вплотную является равенство нулю значения угловой скорости одного объекта, наблюдаемого средствами другого объекта, в нашем случае, наблюдаемого средствами носителя шумопеленгаторной станции. Поэтому, определение абсолютного значения угловой скорости объекта и сравнение его с порогом позволяет выбрать те объекты, траектория движения которых пересекает траекторию движения носителя шумопеленгаторной станции. При этом, указанное второе условие, являясь необходимым, также не является достаточным, поскольку наблюдаемый объект и носитель шумопеленгаторной станции могут двигаться на удаление, а точка пересечения их траекторий является гипотетической. Для окончательного выбора опасных для столкновения объектов необходима проверка третьего условия.
В третьем условии осуществляется анализ скорости изменения мощности сигнала. Известно [Волкова А.А., Никулин М.Н. Интервал времени наблюдения, необходимый для оценивания параметра «величина изменения сигнала» с целью классификации источника // Гидроакустика. 2014. Вып. 20(2). С. 53-60], что при сближении шумящего объекта и носителя шумопеленгаторной станции мощность сигнала увеличивается, и значение скорости изменения мощности сигнала должно быть положительным. Поэтому, определение скорости изменения мощности сигнала и сравнение ее с порогом позволяет выбрать те объекты, расстояние до которых уменьшается.
Выполнение всех трех условий совместно предполагает опасное, вплоть до столкновения, сближение наблюдаемого объекта с носителем шумопеленгаторной станции:
- во-первых, объект и носитель находятся близко,
- во-вторых, траектории движения объекта и носителя пересекаются,
- в-третьих, объект и носитель движутся на сближение.
Таким образом, анализ параметров, измеряемых в режиме шумопеленгования гидроакустического комплекса, позволяет осуществлять непрерывный контроль наблюдаемых морских объектов на предмет их возможного опасного сближения с носителем гидроакустических средств без использования активной локации.
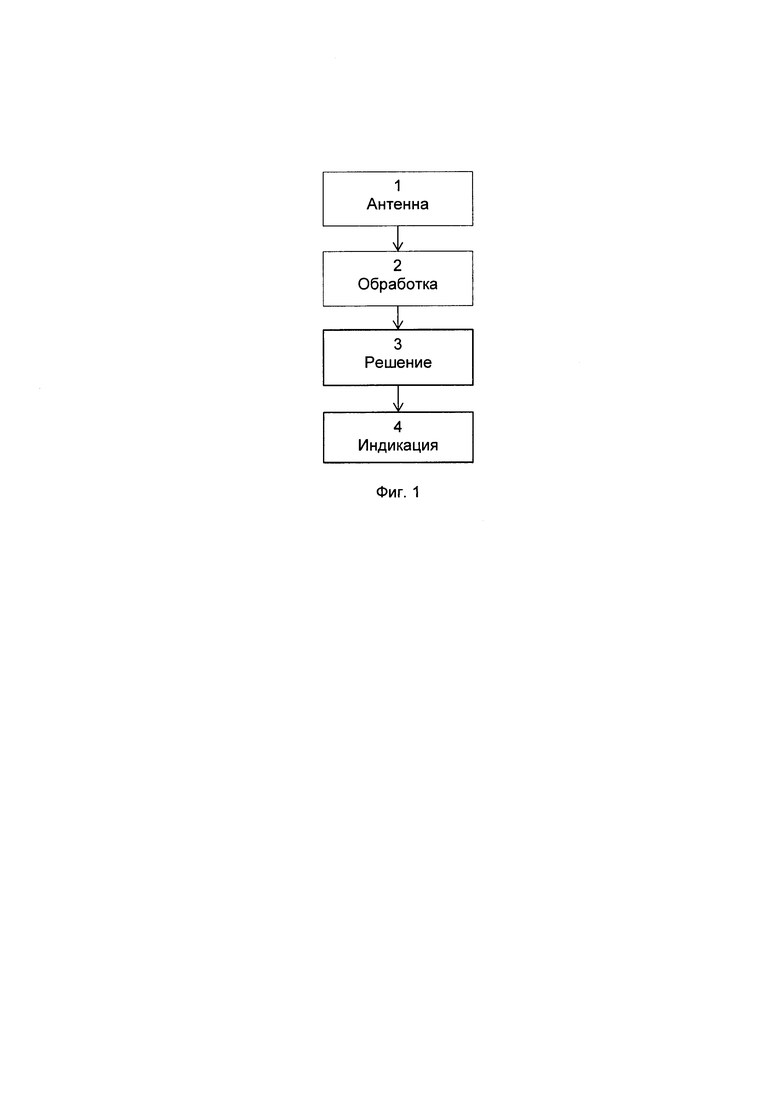
Сущность изобретения поясняется фиг. 1, на которой приведена блок-схема устройства, реализующего предлагаемый способ.
Устройство (фиг. 2) содержит последовательно соединенные блоки: антенну 1, блок 2 определения параметров принятого сигнала (Обработка), блок 3 принятия решения (Решение), блок 4 индикации принятого решения (Индикация).
В динамике работы типовой шумопеленгаторной станции предлагаемый способ реализуется следующим образом.
Сигнал объекта принимается антенной 1, поступает в блок 2, где выполняются типовые процедуры шумопеленгования: осуществляют частотно-временную обработку сигнала в нескольких частотных диапазонах с определением отношения сигнала к помехе qj в каждом из частотных диапазонов j, определяют направления на объект ϕi в горизонтальной плоскости и мощности сигнала Si в последовательные моменты времени ti, определяют угловую скорость объекта как Vϕ=(ϕi-ϕi-1)/(ti-ti-1). Кроме того, в блоке 2 определяют скорость изменения мощности сигнала как VS=(Si-Si-1)/(ti-ti-1) и номер частотного диапазона, в котором отношение сигнала к помехе максимально N=arg maxj(qj), а также определяют абсолютное значение угловой скорости объекта |Vϕ|.
Далее выработанные параметры сигнала N, VS и |Vϕ| поступают в блок 3, в котором осуществляется их сравнение с порогами.
Пороги могут быть установлены на основании известного способа получения ошибок в косвенных измерениях таким образом, чтобы обеспечить требуемую вероятность правильного решения [Тейлор Дж. Введение в теорию ошибок. Пер. с англ. М.: Мир. 1985]. При необходимости, пороги могут быть уточнены экспериментально.
Порог для номера частотного диапазона может быть сформирован на основании известной зависимости оптимальной частоты шумопеленгования от расстояния до объекта [Марасев С.В., Машошин А.И. Оптимальная частота работы гидроакустических средств обнаружения в реальном океаническом волноводе // Фундаментальная и прикладная гидрофизика. 2016. Т. 9, №4. С. 85-92]. Выбирают расстояние до объекта, которое можно считать критически опасным, определяют соответствующую ему оптимальную частоту и номер частотного диапазона для присущего конкретной шумопеленгаторной станции разделения на диапазоны.
Порог для скорости изменения мощности сигнала может быть сформирован на основании известной зависимости ошибки скорости изменения мощности сигнала от интервала времени наблюдения с учетом ошибки измерения мощности сигнала в конкретной шумопеленгаторной станции. Определяют ошибку скорости изменения мощности сигнала, и в качестве порога используют значение, составляющее от двух до трех ошибок для обеспечения требуемой вероятности правильного решения.
Порог для абсолютного значения угловой скорости может быть сформирован аналогично на основании зависимости ошибки угловой скорости от интервала времени наблюдения с учетом ошибки измерения направления в конкретной шумопеленгаторной станции. Определяют ошибку угловой скорости, и в качестве порога используют значение, составляющее от двух до трех ошибок. Для выполнения условия при анализе угловой скорости важно, чтобы значение величины стремилось к нулю при любом знаке, поэтому вычисляется абсолютное значение, которое и сравнивается с порогом.
При совместном выполнении условий N>PorN и VS>PorS и |Vϕ|<Porϕ принимается решение об опасном сближении с шумящим объектом, которое поступает в блок 4 для индикации.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ предупреждения столкновения с морским объектом, основанный на пассивной локации, который может быть использован в режиме шумопеленгования гидроакустического комплекса для объективной проверки обнаруженных морских объектов на опасное сближение с носителем.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
| Способ панорамного обнаружения звука в море | 2021 |
|
RU2776957C1 |
| СПОСОБ ЦВЕТОВОГО КОДИРОВАНИЯ ИНФОРМАЦИИ ГИДРОАКУСТИЧЕСКОГО ШУМОПЕЛЕНГОВАНИЯ | 2015 |
|
RU2593621C1 |
| Способ обнаружения шумящих в море объектов | 2019 |
|
RU2726293C1 |
Использование: изобретение относится к области гидроакустики и предназначено для предупреждения о возможном столкновении с морским объектом, обнаруженным по шумовому полю. Сущность: способ применим для режима шумопеленгования гидроакустического комплекса, осуществляющего прием шумового сигнала объекта гидроакустической антенной, определение отношения сигнала к помехе в совокупности частотных диапазонов, определение направлений на объект и мощностей сигнала в последовательные моменты времени, определение угловой скорости объекта. При реализации способа определяют скорость изменения мощности сигнала, определяют номер частотного диапазона, в котором отношение сигнала к помехе максимально, и принимают решение об опасном сближении с морским шумящим объектом при совместном выполнении трех условий: номер частотного диапазона более порога, скорость изменения мощности сигнала более порога, и абсолютное значение угловой скорости объекта менее порога. Технический результат: обеспечение непрерывного контроля морских шумящих объектов на предмет их возможного опасного сближения с носителем гидроакустических средств без использования активной локации. 1 ил.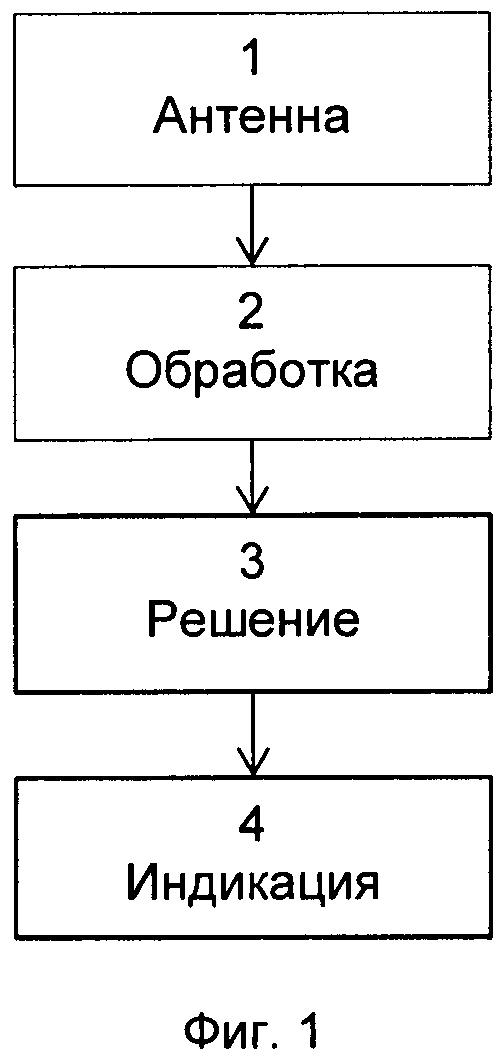
Способ обработки информации в режиме шумопеленгования гидроакустического комплекса, по которому принимают шумовой сигнал объекта гидроакустической антенной, осуществляют частотно-временную обработку сигнала в нескольких частотных диапазонах с определением отношения сигнала к помехе qj в каждом из частотных диапазонов j, определяют направления на объект ϕi в горизонтальной плоскости и мощности сигнала Si в последовательные моменты времени ti, определяют угловую скорость объекта Vϕ как Vϕ=(ϕi-ϕi-1)/(ti-ti-1), отличающийся тем, что определяют скорость изменения мощности сигнала VS как VS=(Si-Si-1)/(ti-ti-1), определяют номер частотного диапазона N, в котором отношение сигнала к помехе максимально N=arg maxj(qj), и принимают решение об опасном сближении с морским шумящим объектом при совместном выполнении трех условий N>PorN и VS>PorS и |Vϕ|<Porϕ, где |Vϕ| - абсолютное значение угловой скорости объекта, PorN, PorS, Porϕ - пороговые значения для номера частотного диапазона, скорости изменения мощности сигнала и абсолютного значения угловой, соответственно.
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
| Способ фотографической печати растров | 1956 |
|
SU122494A1 |
| Способ обзора пространства гидролокатором обеспечения безопасности плавания автономного необитаемого подводного аппарата | 2019 |
|
RU2725706C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |

