Настоящее изобретение относится к гидроакустике и предназначено для определения положения обнаруженного объекта в пространстве при обработке принятого сигнала шумоизлучения объекта стационарным гидроакустическим комплексом. Известен способ, в котором измеряют расстояние между подводными объектами в пассивном режиме при многолучевом распространении [Бурдик B.C. / В.С.Бурдик; Перевод с англ. Н.М. Гусева и др. - Ленинград: Судостроение, 1988. - 391 с.]. Однако, как указывается там же, сложность оценки лучевой структуры делает способ пассивного измерения дистанции практически невыполнимым, поскольку лучевая структура сигнала шумоизлучения для реальных акваторий оказывается значительно сложнее расчетной структуры.
Известны способы, которые направлены на решение задач определения координат: дальности и глубины с использованием результатов расчета поля и сравнения полученных результатов с видом спектров принимаемого сигнала шумоизлучения [Корецкая А.С., Зеленкова И.Д. Патент на РФ №2788341 от 17.01.2023. Способ локализации в пространстве шумящего в море объекта. МПК G01S 3/80, Зеленкова И.Д., Афанасьев А.Н., Корецкая А.С.Патент на РФ №2740169 от 12.01.2021. Способ определения координат морской шумящей цели. МПК G01S 15/00, 3/80, Корецкая А.С., Зеленкова И.Д. Патент на РФ №2782843 от 03.11.2022. Способ определения координат морской шумящей цели. МПК G01S 15/00]. Эти способы содержат прием гидроакустического шумового сигнала гидроакустической антенной, преобразование принятого аналогового сигнала в цифровой вид, сопровождение шумящего объекта в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала в широкой полосе частот, определение помехи и измерение спектра сигнала и его корреляционную обработку, а для определения координат шумящего в море объекта, в том числе и его глубины эти способы используют расчет структуры многолучевого сигнала, достоверность которого не нашла практического подтверждения.
В реальных условиях указанные и подобные им способы на практике не могут обеспечить решения задач определения координат шумящего объекта, когда источник и постоянно, а любой расчет структуры сигнала шумизлучения в дальнем поле не соответствует моменту приема. Скорость звука при этом определяется в точке приема и только для глубины погружения приемника, а не по трассе распространения. В работе [Матвиенко В.Н., Тарасюк Ю.Ф. Дальность действия гидроакустических средств // Судостроение. - 1981. С. 146] отмечается, что «дальность действия станции в районе может оказаться в шесть раз меньше или в два раза больше ожидаемой или наоборот». В работе [Матвиенко В.Н., Тарасюк Ю.Ф. Дальность действия гидроакустических средств // Судостроение. - 1981. С. 183] «при одних и тех же гидроакустических характеристиках среды положение приемника по глубине существенно изменяет условия распространения сигнала от источника. В результате на одном и том же расстоянии от источника его уровень может различаться на 30 дб».
Недостатком этих технических решений является низкая достоверность определения дистанции и глубины из-за сложности определения расчетных координат обнаруженной цели на основе расчета структуры сигнала шумоизлучения по измеренной оценки скорости звука в точке приема. Кроме того, имеются сложности формирования массива расчетных координат для определения коэффициента корреляции, определяемых на основании обработки рассчитанного массива звукового поля. Для использования этих методов требуется обязательно использование гидроакустической антенны, которая развитай в вертикальном направлении для формирования веера узких вертикальных характеристик направленности.
Возникает задача упрощения способа определения глубины погружения шумящего в море источника и повышение его достоверности
Эта задача может быть решена для позиционного стационарного гидроакустического комплекса.
Для решения поставленной задачи предложен способ определения глубины погружения шумящего в море подводного объекта, содержащий прием гидроакустического шумового сигнала гидроакустической антенной, преобразование принятого аналогового сигнала в цифровой вид, сопровождение шумящего объекта в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала в широкой полосе частот Fн-Fв-, где Fн и Fв - нижняя и верхняя частоты диапазона обработки сигнала шумоизлучения аппаратурой, определение помехи и измерение спектра сигнала в который введены новые признаки, а именно прием гидроакустического шумового сигнала гидроакустической антенной позиционного стационарного гидроакустического комплекса, определяют частоту Fмак спектральной составляющей, на которой амплитуда принятого сигнала максимальна Амак, определяют значение частоты F0,5 для спектральной составляющей, амплитуда сигнала на которой составляет 0,5 Амах, и, если значение частоты F0,5<Fмак, то определяют нижнюю частоту спектральной составляющей спектра, на которой амплитуда сигнала превысила порог, принимают ее за нижнюю граничную частоту Fнс диапазона шумоизлучения шумящего объекта, определяют разрешающую способность частотного диапазона системы шумопеленгования по глубине ΔЧД, где  где Н предполагаемая максимальная глубина нахождения объекта, определяют полосу отсутствующей низкочастотной части спектра сигнала шумоизлучения (Fнс-Fн), как разность значения граничной нижней частоты принятого сигнала Fнс и граничной нижней частотой аппаратуры Fн, а ожидаемую глубину положения шумящего объекта Ноб определяют как
где Н предполагаемая максимальная глубина нахождения объекта, определяют полосу отсутствующей низкочастотной части спектра сигнала шумоизлучения (Fнс-Fн), как разность значения граничной нижней частоты принятого сигнала Fнс и граничной нижней частотой аппаратуры Fн, а ожидаемую глубину положения шумящего объекта Ноб определяют как 
Сущность предлагаемого технического решения заключается в следующем.
В работе [Бальян Р.Х., Тимошенков В.Г. Частотная зависимость уровня шумоизлучения морских объектов в низком звуковом диапазоне частот (экспериментальные данные). - НТС Гидроакустика. - 2003. - Вып.№4. - С. 41-46] приведены спектральные характеристик шумоизлучения различных объектов в диапазоне работы стационарного позиционного комплекса на различных дистанциях в низкочастотном диапазоне обработки принимаемого сигнала шумоизлучения. Были получены различные частотные характеристики шумоизлучения для надводных кораблей (НК) и подводных лодок (ПЛ) в зависимости от их положения относительно водной поверхности. Известно, что НК имеют дизельные двигатели, которые вращают винты, расположенные практически на поверхности. Винты рассекают водную поверхность и создают кавитацию при вращении винтов. В результате этого формируется мощный нестационарный всенаправленный шум за счет работы дизеля и за счет кавитации. Максимум шумоизлучения сосредоточен в низкочастотной части излученного спектра и зависит от мощности двигателя, скорости движения, размера судна и состояния морской среды. Физическая природа шумоизлучения подводной лодки, которая находится на глубине, существенно отличается от формирования шумоизлучения НК. В работе [Дж. У. Роберт Основы гидроакустики. - 1978. - 364 с.] приводятся спектры шумоизлучения НК и их зависимости от скорости хода и спектры шумоизлучения ПЛ на поверхности и на перископной глубине, когда ПЛ приводится в движение дизельным двигателем и вид ее спектра шумоизлучения не отличается от вида спектра надводного корабля. Другое дело, если ПЛ движется на глубине не за счет дизельного двигателя, а на электромоторах или на другом малошумном приводе. При движении на поверхности будет формироваться кавитационный шум за счет вращения винтов вблизи поверхности. Чем больше глубина погружения ПЛ, тем меньше кавитация и меньше низкочастотная составляющая спектра, определяемая вращением винтов. На предельных глубинах она практически отсутствует. На этих глубинах в шумоизлучении ПЛ будет присутствовать только средняя и высокочастотная части спектра. При этом излучаемый спектр будет иметь высокочастотную часть, определяемую работой механизмов, и практически не будет зависеть от глубины. На большой глубине погружения подводной лодки низкочастотная часть спектра шумоизлучения не обнаруживаться при движении. Поэтому величина уменьшение низкочастотной части спектра будет говорить об увеличении глубины погружения подводной лодки при неизменной скорости движения и по сокращению нижней части спектра можно определить глубину погружения подводного объекта (ПЛ).
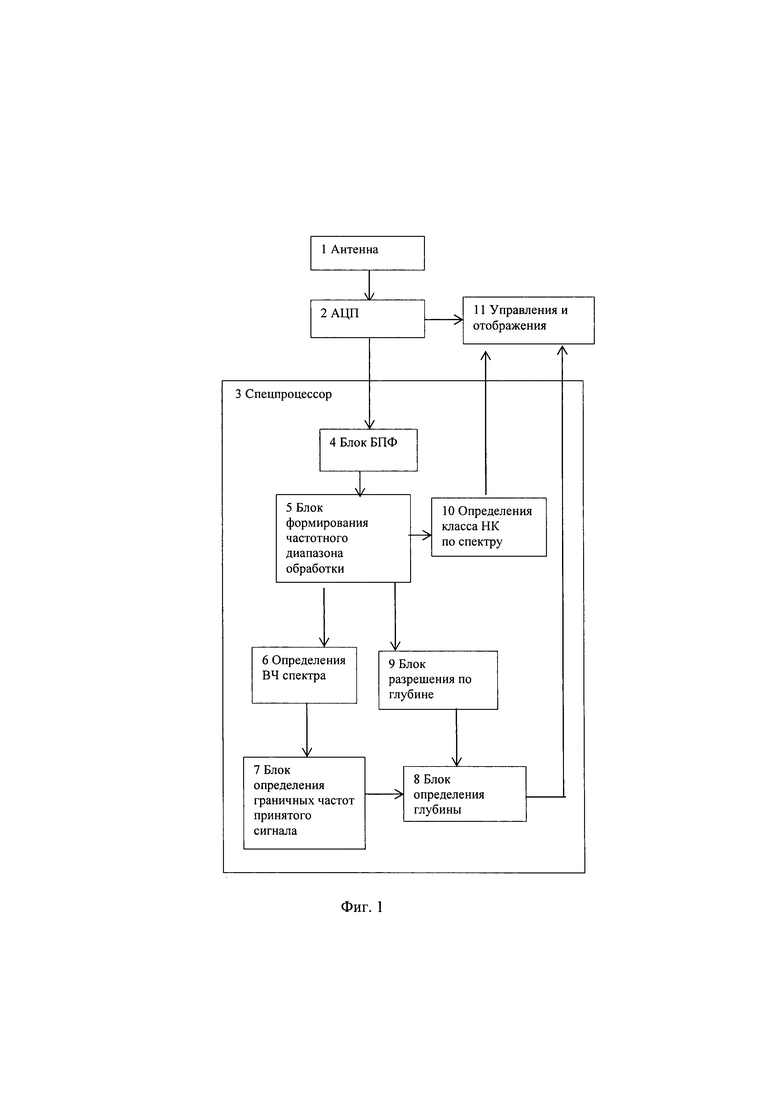
На фиг. 1 представлена блок-схема устройства, реализующего предложенный способ.
Устройство (фиг. 1) содержит антенну 1, которая через аналого-цифровой преобразователь (АЦП) 2 последовательно соединена с блоком 4 быстрого преобразования Фурье (БПФ) спецпроцессора 3. Первый выход блока БПФ через блок 5 формирования частотного диапазона обработки, блок 6 определения высокочастотной части спектра (ВЧ) спектра, блок 7 определения граничных частот принятого сигнала, первый вход блока 8 определения глубины соединен с первым входом блока 11 управления и отображения. Второй выход блока 5 через блок 9 определения разрешения по глубине соединен со вторым входом блока 8 определения глубины. Третий выход блока 5 соединен через блок 10 определения класса объекта по входному спектру со вторым входом блока 11.
Предложенный способ с помощью устройства (фиг. 1) может быть реализован следующим образом.
Антенна 1 принимает шумоизлучение обнаруженной цели и передает сигнал в блок 2 АЦП, в котором производится преобразование аналогового сигнала в цифровой для работы спецпроцессора 3. Спецпроцессор 3 является известным устройством, который используется в современных гидроакустических системах для обработки принятых сигналов в цифровом виде [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. «Корабельная гидроакустическая техника». СПб. Наука. - 2004.].
В спецпроцессоре 3 цифровая информация подается в блок 4 БПФ, где производится определения спектра принятого аналогового сигнала во всей полосе принятой обработки. Выработанный спектр подается в блок 8, где формируется частотный диапазон для определения глубины погружения. В этом диапазоне частот может присутствовать спектр надводного корабля, который находится в том же направлении, что и объект, по которому определяется глубина. Для определения класса объекта определяется форма спектра исследуемого объекта и характер изменения последовательности частот после положения частоты с максимальной амплитудой. Спектр НК находится в низкочастотной части принятого сигнала и его амплитуда уменьшается с повышением частоты. Поэтому этот спектр передается в блок 10 определения класса объекта и далее в блок 11 управления и отображения для представления оператору. В этой ситуации определения глубины погружения не производится. Если решение по наличию шумоизлучения НК в принятом спектре не принято, то дальнейшая обработка принятого спектра шумоизлучения продолжается в блоке 6, где измеряются параметры высокочастотной части спектра. В блоке 7 определяется ширина высокочастотной части принятого спектра шумоизлучения и ширина отсутствующей низкочастотной части спектра, которое передается в блок 8 определения глубины. На второй вход из блока 9 поступает оценка разрешающей способности системы обработки для предполагаемой глубины погружения.
Ниже рассмотрен пример получения оценки глубины при последовательных измерениях
Если ширина полосы обработки входного сигнала аппаратурой, которая формируется в блоке 5, составляет от Fв 1500 Гц до Fн 200 Гц, то предварительно не известно, какой спектр сигнала принят.В блоке 5 определяют наличие сигнала от НК, который находится в диапазоне от 200 Гц и выше и принимается решение, что это НК и дальнейшая обработка не производится. При предполагаемой максимальной глубине погружения подводной лодки Н=400 м. разрешающая способность системы обработки ΔЧД=(Fв-Fн)/Н=1300 Гц/400 м=3,2 гц/м. При определении глубины объекта эта величина определяется в блоке 9. Если ширина спектра принятого сигнала, определенная в блоке 6, равна 500 Гц, то нижняя частота спектра Fнс будет ровна 1000 гц, ширина изменения низкочастотной части спектра, определенной в блоке 7 для глубины погружения ПЛ, (Fнс-Fн)=1000 Гц-200 Гц=800 Гц. При этом ожидаемая глубина погружения обнаруженного объекта, определяемая в блоке 8, может находиться в районе Ноб=(Fнс-Fн)/ΔЧД=800 гц/3,2=250 м. Полученное значение Ноб передается в блок 11 управления и отображения.
Таким образом, используя оценку изменения низкочастотной части спектра можно получить оценку глубины погружения обнаруженного подвижного объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| СПОСОБ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2013 |
|
RU2559310C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ШУМЯЩЕГО В МОРЕ ОБЪЕКТА | 2016 |
|
RU2624798C1 |
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морского объекта | 2020 |
|
RU2754602C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2001 |
|
RU2208811C2 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
Использование: настоящее изобретение относится к гидроакустике и предназначено для определения положения обнаруженного объекта в пространстве при обработке принятого сигнала шумоизлучения объекта стационарным гидроакустическим комплексом. Сущность: способ содержит прием гидроакустического шумового сигнала гидроакустической антенной, преобразование принятого аналогового сигнала в цифровой вид, сопровождение шумящего объекта в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала в широкой полосе частот Fн-Fв, где Fн и Fв - нижняя и верхняя частоты диапазона обработки сигнала шумоизлучения аппаратурой, определение помехи и измерение спектра сигнала, прием гидроакустического шумового сигнала производят гидроакустической антенной позиционного стационарного гидроакустического комплекса, определяют частоту Fмак спектральной составляющей, на которой амплитуда принятого сигнала максимальна Амак, определяют значение частоты F0,5 для спектральной составляющей, амплитуда сигнала на которой составляет 0,5 Амак, и, если значение частоты F0,5<Fмак, то определяют нижнюю частоту спектральной составляющей спектра, на которой амплитуда сигнала превысила порог, принимают ее за нижнюю граничную частоту Fнс диапазона шумоизлучения шумящего объекта, определяют разрешающую способность частотного диапазона системы шумопеленгования по глубине ΔЧД, где  где Н - предполагаемая максимальная глубина нахождения объекта, определяют полосу отсутствующей низкочастотной части сигнала шумоизлучения как разность значения граничной нижней частоты принятого сигнала Fнс и граничной нижней частотой аппаратуры Fн (Fнс-Fн), а ожидаемую глубину положения шумящего объекта Ноб определяют как
где Н - предполагаемая максимальная глубина нахождения объекта, определяют полосу отсутствующей низкочастотной части сигнала шумоизлучения как разность значения граничной нижней частоты принятого сигнала Fнс и граничной нижней частотой аппаратуры Fн (Fнс-Fн), а ожидаемую глубину положения шумящего объекта Ноб определяют как  Технический результат: упрощение способа определения глубины погружения шумящего в море источника и повышение его достоверности. 1 ил.
Технический результат: упрощение способа определения глубины погружения шумящего в море источника и повышение его достоверности. 1 ил.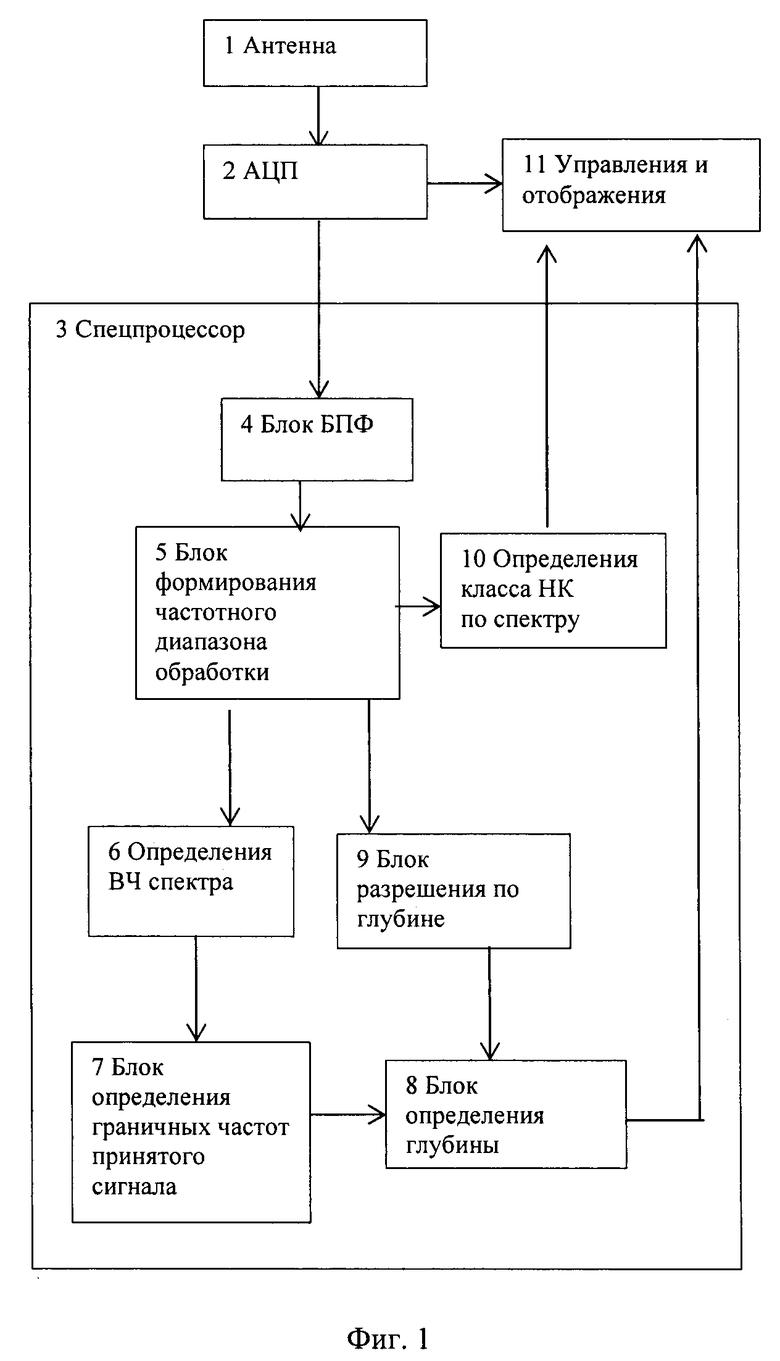
Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом, содержащий прием гидроакустического шумового сигнала гидроакустической антенной, преобразование принятого аналогового сигнала в цифровой вид, сопровождение шумящего объекта в режиме шумопеленгования, спектральный анализ гидроакустического шумового сигнала в широкой полосе частот Fн-Fв, где Fн и Fв - нижняя и верхняя частоты диапазона обработки сигнала шумоизлучения аппаратурой, определение помехи и измерение спектра сигнала, отличающийся тем, что прием гидроакустического шумового сигнала производят гидроакустической антенной позиционного стационарного гидроакустического комплекса, определяют частоту Fмак спектральной составляющей, на которой амплитуда принятого сигнала максимальна Амак, определяют значение частоты F0,5 для спектральной составляющей, амплитуда сигнала на которой составляет 0,5 Амак, и, если значение частоты F0,5<Fмак, то определяют нижнюю частоту спектральной составляющей спектра, на которой амплитуда сигнала превысила порог, принимают ее за нижнюю граничную частоту Fнс диапазона шумоизлучения шумящего объекта, определяют разрешающую способность частотного диапазона системы шумопеленгования по глубине ΔЧД, где ΔЧД=(Fв-Fн)/Н, где Н - предполагаемая максимальная глубина нахождения объекта, определяют полосу отсутствующей низкочастотной части сигнала шумоизлучения (Fнс-Fн) как разность значения граничной нижней частоты принятого сигнала Fнс и граничной нижней частотой аппаратуры Fн, а ожидаемую глубину положения шумящего объекта Ноб определяют как Ноб=(Fнс-Fн)/AЧД.
| Способ локализации в пространстве шумящего в море объекта | 2022 |
|
RU2788341C1 |
| Способ определения координат морской шумящей цели | 2020 |
|
RU2740169C1 |
| Способ определения координат морской шумящей цели | 2021 |
|
RU2782843C1 |
| Способ пассивного определения координат шумящего в море объекта | 2021 |
|
RU2764386C1 |
| Способ определения координат морской шумящей цели | 2018 |
|
RU2690223C1 |
| Способ определения местоположения объектов гидроакустической пассивной системой в условиях многомодового распространения звука | 2017 |
|
RU2667330C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| KR 101939766 B1, 17.01.2019. | |||
