Изобретение относится к космической технике, к классу устройств для управления положением в пространстве с использованием магнитного поля Земли и предназначено в основном для увода отработавших свой срок космических аппаратов (КА) с рабочих орбит (деорбитинга) в плотные слои атмосферы, то есть относится способам и устройствам очистки околоземного космического пространства от космического мусора.
В силу остроты проблемы космического мусора в ближайшие годы требование оснащать все КА системами увода станет одной из норм международного права и войдет в стандарты деятельности аэрокосмических ведомств всех стран мира. В 2003 году, по поручению Комитета ООН по мирному использованию космического пространства (COPUOS), Межагентским координационным комитетом по космическому мусору подготовлен, а в 2007 году Генеральной ассамблеей ООН одобрен список мер, направленных на ограничение техногенного засорения космоса. Предложения включают в себя 25-летнее ограничение на максимальное время жизни исчерпавших свой ресурс низкоорбитальных КА и перевод геостационарных КА на орбиты захоронения. Настоящее изобретение не делает разницы между КА на орбитах: будь то орбиты низкие или высокие. Уводить на орбиты захоронения с высот околостационарных орбит станет нецелесообразным.
Из уровня техники известен электродвигатель, использующий силу Ампера для создания вращающих моментов якорю ([1] Электрические машины. Учебник для учащихся электротехн. спец., 2-е изд., перераб. и доп. М.М.Кацман, М.: Высш. шк., 1990, стр. 321-324). Однако главной целью заявленного технического решения является создание не вращательного, а поступательного движения тела.
Известен способ создания электродинамической тяги (RU 2510567 C2, МПК H02K53/00) в направлении вектора импульса силы преобразованием электроэнергии источника переменного тока путем воздействия магнитного поля магнитопровода индуктора и электрического тока, отличающийся тем, что обеспечивают взаимодействие вектора магнитной индукции замкнутого магниторовода, выполненного из электропроводящего материала, с ортогональным ему вектором тока проводимости, протекающего между электродами, охватывающими внешнюю и внутреннюю поверхности замкнутого магнитопровода. Выпрямляемый переменный ток от источника питания проходит через тороидальную катушку, генерирующую внутри себя магнитный поток, он же посредством двух пар электродов, подведенных к противоположным участкам сердечника катушки, организует ток проводимости во взаимно противоположных направлениях, что создает условия для возникновения двух сил Ампера одинакового направления, что, по идее авторов аналога, должно привести к перемещению и катушки, и источника тока, и вообще транспортного средства, на котором размещены катушка и источник тока.
Все типы электродвигателей, так или иначе, используют силу Ампера, все электрореактивные двигатели используют ионизацию рабочего тела и разгон плазмы в электрических полях.
Задачей заявленного изобретения является создание узкоспециализированного двигателя, работающего в период деорбитинга.
Идея предлагаемого изобретения состоит в использовании силы отталкивания специальным образом собранного электромагнита на постоянном токе от внешней среды - магнитного поля Земли. Такой электромагнит с ферромагнитным магнитоводом выдает магнитный поток только в одном направлении (магнитные потоки вне магнитоводов относительно магнитных потоков по ходу внутри магнитоводов и в их торцах пренебрежимо малы). В заявленном техническом решении индуктором внешнего магнитного поля выступает Земля, которое при деорбитинге КА, вступая во взаимодействие с магнитным полем предлагаемого устройства - индуктором одностороннего магнитного потока, создает на КА, летающих по наклонным орбитам, составляющие тяги вдоль орбит.
В результате проведенного информационного поиска, а также анализа уровня техники, аналогов и прототипа с совокупностью существенных признаков, близкой к совокупности существенных признаков заявленного изобретения, обнаружено не было.
Задачей заявленного изобретения является создание экономичного электромагнитного устройства. Устройство должно потреблять некритичное для системы электропитания КА количество электроэнергии, как двигатель иметь более чем удовлетворительную тягу, позволяющую завершать процесс увода КА в плотные слои атмосферы за полгода - год с момента принятия решения о прекращении активного функционирования КА.
Решение задачи заключено в следующем.
Электромагнитный космический двигатель (ЭМКД), преобразует непосредственно электрическую энергию от источника постоянного тока на борту космического аппарата (КА) в кинетическую энергию, содержит индукционные устройства (ИУ), расположенные поровну на двух платформах, закрепленных на диагонально противоположных относительно центра масс КА посадочных местах корпуса КА посредством штанг, расстояния центров посадочных мест которых до центра масс КА производят равенство плеч сил, и каждое из которых содержит: соленоид с неферромагнитной трубкой, внутри которой находится магнитомягкий сердечник и, под срез, - неферромагнитный материал или вакуум; монолитный, в целом дискообразный плоский магнитомягкий магнитный экран, центральная часть которого имеет форму гиперболического конуса и обращена внутрь трубки; жесткое соединение соосных соленоида и магнитного экрана, размер которого перекрывает возможность прямого взаимодействия магнитных полей Земли и ИУ со стороны ближайшего к экрану торца сердечника соленоида.
ЭМКД обслуживает электрическая цепь с источником постоянного тока и переключателем входного направления тока.
Заявленное изобретение основано на том, что поступательное движение (движение центра масс) собранного определенным образом устройства с намагниченным телом в локально однородном внешнем магнитном поле, например - в поле Земли, возможно.
Описание эксперимента
1. Над кольцевым магнитом перпендикулярно его оси симметрии установили через неферромагнитный материал железистую пластину - магнитный экран диаметром, много превышающим размер магнита. Имели простейшее тяговое ИУ, или просто ИУ.
2. В неферромагнитную емкость водой опустили платформу из пенопласта с закрепленным на ней в боковом (ось симметрии магнита параллельна уровню воды) положении ИУ. Платформа в горизонтальном сечении круглая, что исключило принципиальную погрешность курса движения центра масс ИУ за счет различного сопротивления воде бортов платформы в основном из-за того, что ось симметрии ИУ в той или иной мере не совпадает с осью симметрии прямоугольной платформы. Такая операция минимизировала влияние сил тяготения и трения.
3. Из своего начального положения ИУ, вместе с платформой, взаимодействуя с геомагнитным полем, развернулось и начало в направлении «север-юг» поступательное ускоренное движение.
В обычных земных условиях сила трения, возникающая в относительно массивных телах, значительно перекрывает магнитную тягу. Да и условия для возникновения поступательного движения за счет магнитной тяги весьма специфичные. В условиях же космоса отсутствуют (или практически отсутствуют) силы трения при взаимодействии с окружающим пространством. Значит, магнитная тяга в предлагаемых данным изобретением обстоятельствах - в околоземной космической магнитной обстановке реальна, возможна и воспроизводима, в теории, - при сколь угодно малом уровне напряженности геомагнитного поля. Потому в названии двигателя присутствует слово «космический».
Технический результат достигается за счет использования ЭМКД - набора ИУ из соленоидов и магнитоводов, одно из которых представлено на фиг. 3 (см. ниже). Деорбитинг достигается благодаря тяге, создаваемой ИУ, в состав которого входят магнитный экран и соленоид с магнитомягким сердечником, все силовые линии магнитного поля ИУ пропускающего через себя, один из торцов которого является единственной рабочей активной поверхностью (АП). В этом суть изобретения.
Сущность изобретения поясняется фиг. 1 - фиг. 3, где представлены:
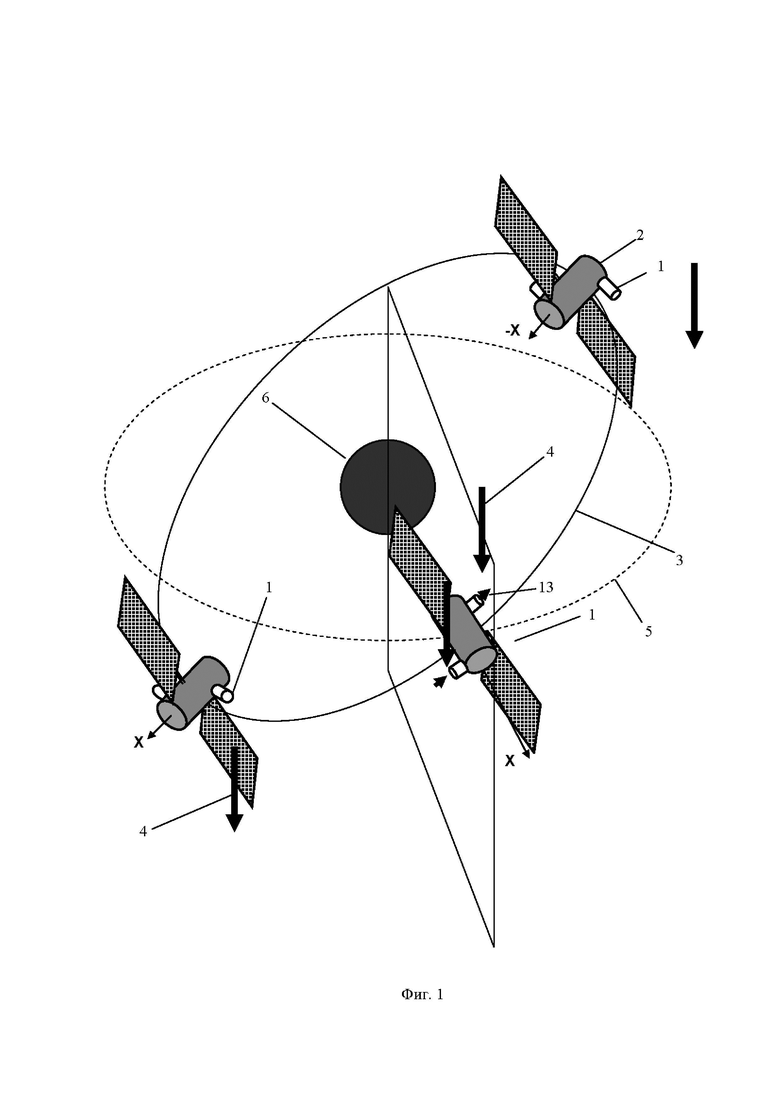
- на фиг. 1 схема натурных условий работы ЭМКД;
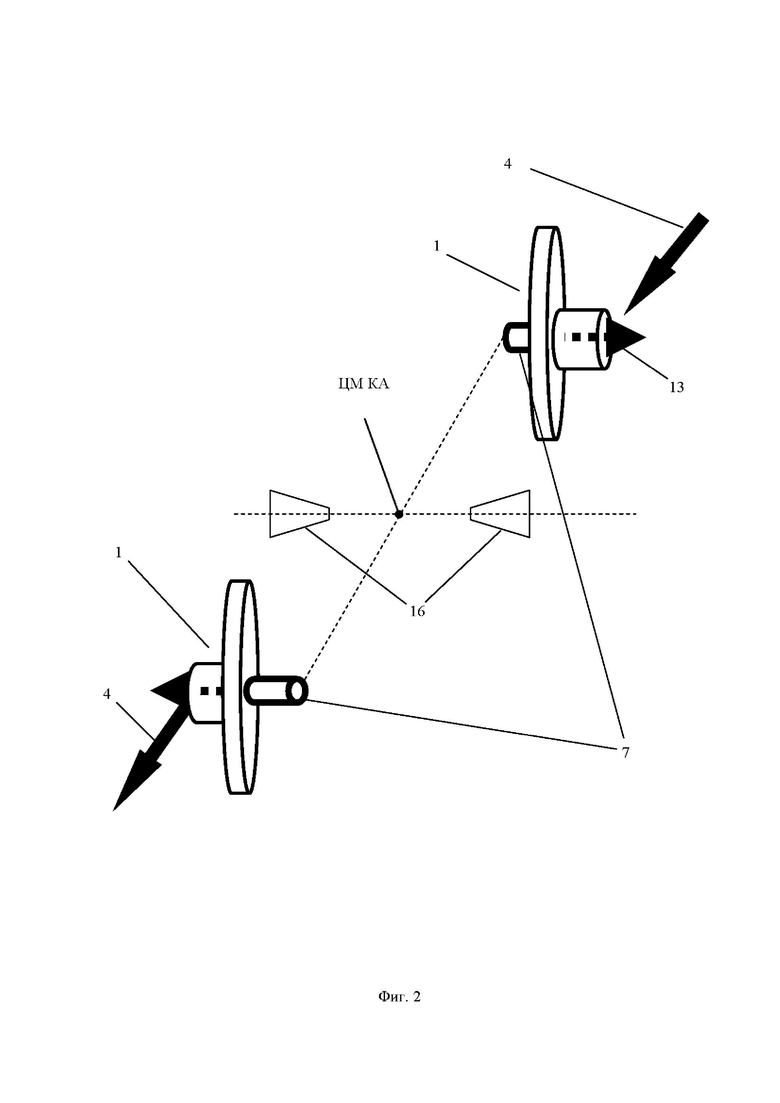
- на фиг. 2 монтажная схема ЭМКД;
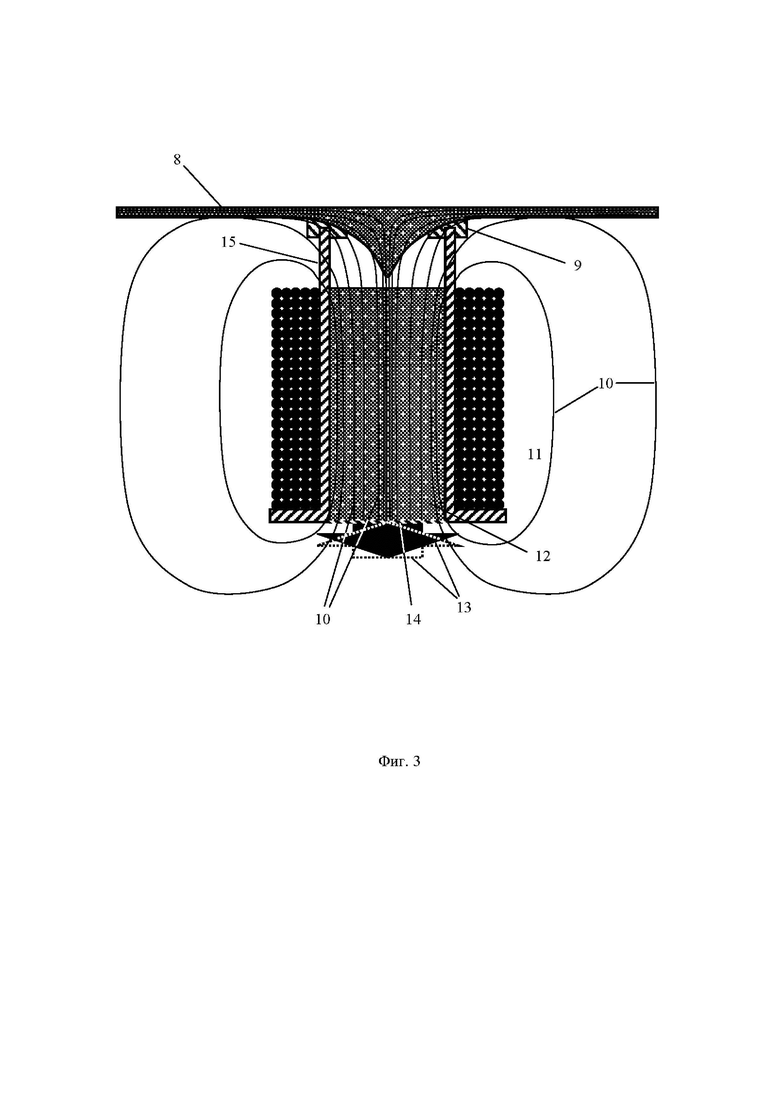
- на фиг. 3 электрическая принципиальная схема ИУ ЭМКД.
Введены следующие обозначения:
1 - ИУ ЭМКД;
2 - корпус КА;
3 - орбита КА;
4 - силовые линии магнитного поля Земли;
5 - плоскость магнитного экватора;
6 - Земля;
7 - штанга-держатель;
8 - магнитный экран ИУ;
9 - кольцевой держатель магнитного экрана;
10 - силовые линии сердечника - линии магнитной индукции ИУ;
11 - обмотка соленоида неферромагнитные стенки соленоидов;
12 - магнитомягкий сердечник соленоида;
13 - выходной вектор магнитного потока из ИУ;
14 - АП;
15 - неферромагнитная трубка соленоида;
16 - двигатели коррекции;
ЦМ КА - центр масс КА.
Под ИУ следует понимать самостоятельную функциональную часть целого - ЭМКД; каждый модуль - ИУ вносит свой одинаковый с другими модулями вклад в общую тягу ЭМКД.
Обоснование предлагаемого решения
Силовые линии 4 магнитного поля Земли в локациях можно рассматривать как равновекторные, а само магнитное поле можно считать однородным. Тогда столб локального околоземного пространства (СЛОП), ось магнитной симметрии которого совпадает с осью магнитной симметрии ИУ, можно считать вакуум-сердечником некоего соленоида, площадь торца которого равна площади торца основного соленоида ИУ.
Вращательное движение соленоида или просто постоянного магнита в магнитном поле Земли наблюдаемо уже на примере магнитной стрелки компаса. Вращательное движение намагниченного тела во внешнем магнитном поле обязано несовпадением направлений интегральной магнитной индукции поля этого тела и магнитной индукции источника внешнего магнитного поля, с учетом, в меньшей степени - замкнутости силовых линий внешнего контура магнитного поля тела, которые, в отсутствие возмущающих факторов, образуют фигуру вращения, в общем случае, переменного сечения. Придавать особого значения этому (последнему) фактору не следует. На практике силовые линии магнитного поля под действием внешних факторов, таких как потоки плазмы или просто жидкости, способны сильно деформироваться и даже уноситься вслед набегающему потоку, что говорит только о декларативной замкнутости силовых линий магнитных полей. Имеют решающее значение магнитные потоки в районе полюсов электромагнита. Чем плотнее встречающиеся магнитные потоки опытного образца и внешней среды, тем, при прочем равном, больше момент силы относительно центра вращения.
Почему не наблюдается поступательное движение ИУ с соленоидом без магнитного экрана в локально однородном магнитном поле Земли? Потому, что интересующее взаимодействие одного полюса соленоида со СЛОП (всегда говорим именно о соленоидах - цилиндрических катушках индуктивности) полностью компенсируемо взаимодействием со СЛОП другого полюса соленоида: на соленоид действует пара сил взаимно противоположных направлений. При этом внешний контур магнитного поля соленоида не может вызывать его поступательного движения, что демонстрируется взаимодействием пробного соленоида с двумя другими соленоидами, имеющими одинаковые характеристики магнитного поля, когда центры всех соленоидов находятся на одной линии, перпендикулярной их осям.
Еще одно соображение. Если пару соленоидов закрепить на каком-либо объекте на достаточном диагонально противоположном удалении от центра масс этого объекта так, чтобы производить всегда равенство плеч сил, ориентация объекта в пространстве нарушаться не будет.
Центральная часть магнитного экрана 8 имеет форму конуса, лучше - гиперболического, способного более эффективно ориентировать оси намагниченности доменов вдоль направляющих, ведущих к краям этого магнитного экрана-диска. Попадая внутрь магнитного экрана, в немалой степени благодаря этому конусу, вершина которого обращена к центру сердечника 12 соленоида ИУ, силовые линии 10 сердечника соленоида расходятся лучами от центра экрана или сходятся к этому центру, проходя весь объем экрана практически без потерь. Силовые линии 4 магнитного поля Земли (МПЗ) со стороны экрана взаимодействуют с силовыми линиями 10 ИУ, усиливая или ослабляя суммарное магнитное поле только внутри экрана. За краями диска результирующее влияние этих силовых линий полностью сбалансировано. Потому магнитный экран в полной мере отвечает своему назначению.
Теперь можно говорить об одностороннем воздействии МПЗ на работающее ИУ (то же, что и на соленоид).
Сила F (притяжения, подъемная сила) электромагнита рассчитывается по известной [1] (Справочник по элементарной физике. Н.И.Кошкин, М.Г.Ширкевич, 10-е издание, М., Наука, 1988, стр. 140) формуле:
где В = μ0 μсН - магнитная индукция соленоида, Тл;
Н - напряженность поля внутри соленоида без сердечника, Гн;
μс - коэффициент усиления магнитной индукции поля в сердечнике соленоида - относительная магнитная проницаемость сердечника;
S - площадь поперечного сечения наконечника электромагнита (например, торца сердечника соленоида), м2;
μ0 = 4π⋅10-7⋅Н⋅А2 - магнитная постоянная;
μ - коэффициент усиления магнитной индукции внешнего магнитного поля - относительная магнитная проницаемость среды (для воздуха, вакуума μ равно 1).
Формула (1) применима для подъемных электромагнитов. Перепишем ее в виде:
где Rс - радиус сердечника, м.
Но F - это вообще-то сила действия магнита на намагничиваемое тело. В случае с подъемной силой грузового электромагнита считается, что наведенная магнитная индукция в намагничиваемом (намагниченном) теле та же, что и в подъемнике (хотя это не совсем так), и радиус Rс для магнита-подъемника тот же, что и совокупный радиус поднимаемого магнитовосприимчивого груза. Поскольку в нашем случае нет наведенной магнитной индукции, а есть активный, пусть и слабый магнит-Земля 6 со своей самостоятельной магнитной индукцией, будем формулу (2) приводить в соответствие нашему случаю:
где F - сила взаимодействия магнитных полей соленоида с сердечником 12 и Земли, Н;
В с - магнитная индукция АП 19 соленоида, Тл;
В вн - магнитная индукция (внешнего) МПЗ, Тл;
Ф с, Фвн - соответственно магнитный поток из АП 14 и встречный (внешний) магнитный поток индукции 4 МПЗ, Вб.
Сравним (3) с формулой силы взаимодействия (F0≡0) торцов двух одинаковых соосных соленоидов c одинаковой индукцией ([2] Б.М.Яворский и А.А.Детлаф, Справочник по физике, издание 7-е, стр.434, 437):
d >> Rс, (5)
где d - расстояние между торцами сердечников, м.
Условие (5) гарантирует, что линии магнитной индукции в достаточно узком цилиндрическом пространстве между соленоидами будут параллельны друг другу, то есть коллинеарны. Тем самым создаются идеальные (простейшие, точно описываемые) условия взаимодействия магнитных полей. Но формула (4) не работает при d равном нулю, а формулы (1) и (3) работают. Формула (1) имеет важное практическое значение, и она в представлении (3) в основном повторяет формулу (4). В случае с формулой (3) в линейных размерах имеет значение лишь площадь и соответственный радиус; в случае с формулой (4) имеет значение площадь и расстояние. Как в (3), так и в (4) μ равно 1.
Примем за отправные данные:
- I - ток нагрузки 5 А;
- U - напряжение на шинах КА 300/27 В;
- ρ - удельное сопротивление медных частей ЭМКД 0,0178⋅10-6Ом·м (обмотка);
- Bвн - на высоте геосинхронной 24-часовой орбиты (ГСхО) магнитная индукция 0,16…10-6 Тл;
- μс - коэффициент усиления магнитной индукции поля в соленоида, примем равным 1000.
ГСхО имеет ту же большую полуось, что и геостационарная орбита и отличается ненулевым наклонением.
Рассмотрим, какие материальные и энергетические затраты потребуются для создания приемлемой результирующей силы (равно - тяги) ЭМКД.
Следует отметить, что комплект ЭМКД состоит (фиг. 2) минимум из двух одинаковых ИУ 1, тяги которых направлены вдоль орбиты 3 КА, и расположенных на двух платформах, закрепленных на диагонально противоположных относительно центра масс КА посадочных местах корпуса 2 КА посредством штанг 7, длины которых, вкупе с расстояниями центров посадочных до центра масс КА, производят равенство плеч сил, действующих со стороны ЭМКД на ориентацию КА. Векторы тяг ИУ ЭМКД могут не проходить через ЦМ КА, так как такая ориентация векторов тяг предназначена, скорее всего, для двигателей 16 системы коррекции КА.
Рассмотрим техническую состоятельность одного ИУ 1 на высоте ГСхО. Будем иметь согласно (3) с учетом выдачи импульса тяги в точке орбиты, в принципе, где вектор 13 был бы коллинеарным силовым линиям 4 МПЗ:
где 
N - число витков обмотки;
L = 4Rc - длина соленоида, м;
α 1, α2 - углы, отсчитываемые от оси соленоида, под которыми из середины АП (характерной точки) видны концы соленоида;
В данном примере угол α1 всегда равен π/2, поскольку характерная точка находится на оси соленоида и в его торце (или, - на АП 14).
Напряженность магнитного поля на концах соленоида без сердечника при I равном 5 A, толщине изоляции равной 10% диаметра сечения провода 1 мм и соответствующей концентрации 833 витков/м, составляет ([3] Б.М.Яворский и А.А.Детлаф, Справочник по физике, издание 8-е, стр.453) 2016 А/м, соответственно магнитная индукция ([3] стр. 458) 0,0025 Тл. Это немного, и соответствует начальному этапу технического намагничивания, когда зависимость магнитной проницаемости от магнитной индукции носит линейный характер. Именно здесь и возможно намагничивание и размагничивание без необратимых последствий. Магнитомягкий сердечник с коэффициентом усиления μс равным 1000 уже выбран. Малая коэрцитивная сила: при отключении от сети ЭМКД будет практически полностью размагничен.
Магнитная индукция соленоида в точках оси, совпадающих с его концами, равна:
где α1= π/2.
Остановимся на соотношении L = 4Rc. Тогда плотность магнитного потока (магнитная индукция) составит у АП:

Будем считать, что радиус АП 0,1 м. Тогда согласно (6) с учетом (8) тяга ИУ (при ассистировании геомагнитным полем) равна 10,13 мН или 1,0 Г. Пара ИУ ЭМКД обеспечивает 2,0 Г. Удовлетворительной тягой можно считать тягу более 4 Г - такая тяга используется в баллистическом обеспечении полетов КА и гарантирует деорбитинг (именно увод КА в плотные слои атмосферы) в приемлемые сроки даже с ГСхО. Хорошо бы иметь удовлетворительную тягу и уменьшить радиус АП 14. Пусть вместо одного ряда витков обмотки 11 у соленоида будет пять. Тогда тяга двух ИУ 1 при радиусе АП 0,05 м составит 25,3 мН (2,6 Г). Но ИУ на борту КА планируется 6-8 - по три-четыре ИУ на каждой из двух платформ. Это уже может быть 100 мН. Этого вполне достаточно для деорбитинга с ГСхО. Оптимальную напряженность магнитного поля в ИУ находят на этапе проектирования.
Следует отметить, что все формулы магнитной индукции и напряженности магнитного поля внутри соленоидов приведены для случаев измерения соответствующих величин на электрической оси соленоида. Напряженность магнитного поля выше, и величина магнитной индукции всего больше возле стенок 15, на которые наложена обмотка 11. Потому общий магнитный поток через АП 14 будет больше по сравнению с магнитным потоком, имеющим плотность (магнитную индукцию), рассчитанную по формуле (8).
В заявленном техническом решении описан лишь принципиальный подход к созданию тяги на борту КА с помощью ЭМКД и доказывается принципиальная и фактическая возможность решения такой задачи.
Подсчитаем общую длину обмоточного провода ЭМКД. Этот параметр является определяющим в отношении энергетической и массовой характеристик изделия. Имеем пять витков обмотки соленоида. Общую длину l обмоточного провода соленоида рассчитаем по формуле:

где N - количество рядов обмотки, 5;
Rст - внешний радиус стенки трубки 15 соленоида, м;
L - длина соленоида, м.
Общая длина обмоточного провода соленоида одного ИУ (см. ниже) при толщине стенки трубки 15 соленоида 4 мм составит 288 м, и общая длина обмоточного провода соленоидов при количестве модулей равном восьми составит 2307 м.
Фиксируем характеристики электрической цепи ЭМКД:
- внешний радиус стенки 15 соленоида - 0,054 м;
- радиус поперечного сечения обмоточного провода - 0,5 мм;
- толщина изоляции ~ 0,1 мм;
- количество ИУ ЭМКД - 8 шт.;
- длина обмоточного провода соленоида ~ 288 м;
- общая длина обмоточного провода ~ 2300 м;
- количество слоев витков обмотки 11 соленоида - 5;
- сопротивление обмотки соленоида ~ 6,5 Ом;
- общее сопротивление обмоток ЭМКД ~ 52 Ом;
- соединения соленоидов в ИУ и ИУ ЭМКД последовательные;
- напряжение ~ 260 В (отказываемся от дежурного напряжения в 27 В);
- ток в цепи ЭМКД ~ 5 А и электрическая мощность ~ 1300 Вт;
- диаметр диска магнитного экрана 400 мм;
- высота диска магнитного экрана без гиперболического конуса 5 мм;
- общая масса одного ИУ при плотности магнитомягкого железа - электротехнической стали 7,65⋅103 кг/м3 (сердечник 12, магнитный экран 8, не более 17,8 кг); при плотности меди 8,92⋅103 кг/м3 (обмотка 11 соленоида, не более 16,1 кг); при плотности алюминия 2,70⋅103 кг/м3 (неферромагнитные части ЭМКД: трубка соленоида 13, кольцевой держатель 9 магнитного экрана, не более 1,3 кг) порядка 35,2 кг или 35,2 кГ (Р=mg, где Р - нормированная сила тяжести (вес) в Н; m - масса, кг; g - ускорение свободного падения, 9,81 м/с2; по определению 1 кГ силы равен 9,81⋅Н; m кГ = 9,81⋅m⋅1Н; но в 9,81⋅m, Н содержится m кг массы, значит, m кГ силы соответствует m кг массы, и, если не хотим прибегать к не совсем определенному понятию веса, можем это понятие заменить на массу, приравняв кГ к кг. Это не противоречит тому, если бы мы хотели иметь в виду массу именно в кг. Дело вкуса). ЭМКД, состоящий из восьми ИУ, имеет массу 282 кг.
Уровень круглосуточной средней эффективной тяги ЭМКД:

где Fэфф - средняя эффективная тяга вдоль орбиты КА 3, Н;
k - количество модулей в ЭМКД;
F 0 = F - максимальная инструментальная тяга одного модуля ЭМКД при iМ равном π/2 и UM равном 0, Н;
iМ - наклонение орбиты 3 к плоскости магнитного экватора 5;
(cosUM)ср = 0,64 - средний косинус на интервале UM от 0 до π/2;
UM - текущий угол между положением КА в пространстве и точкой пересечения орбиты 3 КА с магнитным экватором Земли («магнитный» аргумент широты КА),
при среднем iМ порядка 58,5 градусов (географическое наклонение орбит КА) ± 10 градусов (отклонение магнитного полюса от географического) составит порядка 0,054 Н (5,5 Г). Будем иметь в виду сказанное выше о том, что напряженность магнитного поля на АП будет выше, чем рассчитанная по формуле (8).
На высоте низких круговых орбит (НКО), где для наклонных орбит средняя на витке Bвн равна 40⋅10-6Тл, при тех же вышеприведенных фиксированных характеристиках ЭМКД, круглосуточная эффективная тяга будет в 250 раз больше и равна 13,5 Н (1,4 кГ). Конечно, массогабаритные характеристики ЭМКД на НКО можно уменьшить и должны быть в разы уменьшены. Уменьшая характерный радиус модуля ЭМКД в три раза с соответственным увеличением пропорций радиуса Rс к неизменной длине L, тем самым уменьшим массу ЭМКД в 9 раз. Тогда диаметр АП 14 станет равным 0,0333 м, масса одного ИУ - порядка 3,9 кг, общая масса восьми ИУ не более 32 кг. Тяга укомплектованного ЭМКД на НКО составит порядка 1,5 Н.
Конечно, приведенные характеристики ЭМКД - один из вариантов его решения. Можно найти решения более удачные. Можно, к примеру, перейти на напряжение ниже 260 В, поскольку спешить с деорбитингом, по большому счету, нерационально.
Поскольку энергобаланс КА нисколько не пострадает от круглосуточной работы ЭМКД, деорбитинг следует проводить круглосуточно, то есть безостановочно, для чего в точках вертекса, где аргументы широты КА равны π/2 или 3π/2, в электрической цепи ЭМКД следует переключать входные направления тока. Все это можно делать с земли, но лучше - согласно типовой программы, заложенной на борт КА, предусматривающей весь комплекс работ по деорбитингу в автоматическом (автономном) режиме с регламентным контролем оператором.
На фиг. 4 приведена зависимость тяги ЭМКД от высоты полета КА, в таблице 1 и таблице 2 приведены баллистические и временные характеристики полета геосинхронных КА (масса 3500 кг) с начала деорбитинга с высоты ГСхО и на заключительном этапе существования КА, в таблице 3 приведены баллистические и временные характеристики полета КА массы 1500 кг в условиях деорбитинга с НКО. В таблицах 1 - 3:
Δt - шаг расчета , временной интервал;
r/RЗ - отношение радиуса орбиты КА к среднему радиусу Земли;
r - радиус орбиты КА;
ΔV - приращение скорости;
V - орбитальная скорость;
Fэфф - тяга.
Время деорбитинга с геосинхронных 24-часовых орбит при начальной средней эффективной тяге 0,067 Н не превышает 9,5 месяцев. На высоких орбитах встречаются и малые КА с массой и 350 кг. Значит, ускорение КА под действием той же тяги 0,067 Н будет в 10 раз больше, что позволяет проводить значимую минимизацию массогабаритных характеристик ЭМКД. Время деорбитинга с высоты 1000 км при начальной средней эффективной тяге 1,5 Н и массе находящихся там КА не более 1500 кг составит 5 суток. Основная масса КА на НКО 250 - 350 кг. Значит, ускорение КА под действием той же тяги 1,5 Н будет в 4 - 6 раз больше, что также позволяет проводить значимую минимизацию массогабаритных характеристик ЭМКД.
Уводить КА со средних орбит, где находятся спутники глобальной навигационной связи типа ГЛОНАСС и GPS, на околоземные орбиты утилизации станет возможным, и разработка ЭМКД того стоит.
Следует отметить небольшие затраты трудовых и материальных ресурсов на реализацию заявленного устройства и превосходную степень надежности его работы (ломаться нечему).
Данное изобретение целесообразно использовать вместе с [4] (Способ ликвидации КА, уведенных с рабочих орбит в плотные слои атмосферы, и устройство для фрагментации КА в плотных слоях атмосферы (RU 2708407 МПК B64G 9/00).
Все типы электродвигателей, так или иначе, используют силу Ампера, все электрореактивные двигатели используют ионизацию рабочего тела и разгон плазмы в электрических полях.
Задачей заявленного изобретения является создание узкоспециализированного двигателя, работающего в период деорбитинга.
Идея предлагаемого изобретения состоит в использовании силы отталкивания специальным образом собранного электромагнита на постоянном токе от внешней среды - магнитного поля Земли. Такой электромагнит с ферромагнитным магнитоводом выдает магнитный поток только в одном направлении (магнитные потоки вне магнитоводов относительно магнитных потоков по ходу внутри магнитоводов и в их торцах пренебрежимо малы). В заявленном техническом решении индуктором внешнего магнитного поля выступает Земля, которое при деорбитинге КА, вступая во взаимодействие с магнитным полем предлагаемого устройства - индуктором одностороннего магнитного потока, создает на КА, летающих по наклонным орбитам, составляющие тяги вдоль орбит.
В результате проведенного информационного поиска, а также анализа уровня техники, аналогов и прототипа с совокупностью существенных признаков, близкой к совокупности существенных признаков заявленного изобретения, обнаружено не было.
Задачей заявленного изобретения является создание экономичного электромагнитного устройства. Устройство должно потреблять некритичное для системы электропитания КА количество электроэнергии, как двигатель иметь более чем удовлетворительную тягу, позволяющую завершать процесс увода КА в плотные слои атмосферы за полгода - год с момента принятия решения о прекращении активного функционирования КА.
Решение задачи заключено в следующем.
Электромагнитный космический двигатель (ЭМКД), преобразует непосредственно электрическую энергию от источника постоянного тока на борту космического аппарата (КА) в кинетическую энергию, содержит индукционные устройства (ИУ), расположенные поровну на двух платформах, закрепленных на диагонально противоположных относительно центра масс КА посадочных местах корпуса КА посредством штанг, расстояния центров посадочных мест которых до центра масс КА производят равенство плеч сил, и каждое из которых содержит: соленоид с неферромагнитной трубкой, внутри которой находится магнитомягкий сердечник и, под срез, - неферромагнитный материал или вакуум; монолитный, в целом дискообразный плоский магнитомягкий магнитный экран, центральная часть которого имеет форму гиперболического конуса и обращена внутрь трубки; жесткое соединение соосных соленоида и магнитного экрана, размер которого перекрывает возможность прямого взаимодействия магнитных полей Земли и ИУ со стороны ближайшего к экрану торца сердечника соленоида.
ЭМКД обслуживает электрическая цепь с источником постоянного тока и переключателем входного направления тока.
Заявленное изобретение основано на том, что поступательное движение (движение центра масс) собранного определенным образом устройства с намагниченным телом в локально однородном внешнем магнитном поле, например - в поле Земли, возможно.
Описание эксперимента
1. Над кольцевым магнитом перпендикулярно его оси симметрии установили через неферромагнитный материал железистую пластину - магнитный экран диаметром, много превышающим размер магнита. Имели простейшее тяговое ИУ, или просто ИУ.
2. В неферромагнитную емкость водой опустили платформу из пенопласта с закрепленным на ней в боковом (ось симметрии магнита параллельна уровню воды) положении ИУ. Платформа в горизонтальном сечении круглая, что исключило принципиальную погрешность курса движения центра масс ИУ за счет различного сопротивления воде бортов платформы в основном из-за того, что ось симметрии ИУ в той или иной мере не совпадает с осью симметрии прямоугольной платформы. Такая операция минимизировала влияние сил тяготения и трения.
3. Из своего начального положения ИУ, вместе с платформой, взаимодействуя с геомагнитным полем, развернулось и начало в направлении «север-юг» поступательное ускоренное движение.
В обычных земных условиях сила трения, возникающая в относительно массивных телах, значительно перекрывает магнитную тягу. Да и условия для возникновения поступательного движения за счет магнитной тяги весьма специфичные. В условиях же космоса отсутствуют (или практически отсутствуют) силы трения при взаимодействии с окружающим пространством. Значит, магнитная тяга в предлагаемых данным изобретением обстоятельствах - в околоземной космической магнитной обстановке реальна, возможна и воспроизводима, в теории, - при сколь угодно малом уровне напряженности геомагнитного поля. Потому в названии двигателя присутствует слово «космический».
Технический результат достигается за счет использования ЭМКД - набора ИУ из соленоидов и магнитоводов, одно из которых представлено на фиг. 3 (см. ниже). Деорбитинг достигается благодаря тяге, создаваемой ИУ, в состав которого входят магнитный экран и соленоид с магнитомягким сердечником, все силовые линии магнитного поля ИУ пропускающего через себя, один из торцов которого является единственной рабочей активной поверхностью (АП). В этом суть изобретения.
Сущность изобретения поясняется фиг. 1 - фиг. 3, где представлены:
- на фиг. 1 схема натурных условий работы ЭМКД;
- на фиг. 2 монтажная схема ЭМКД;
- на фиг. 3 электрическая принципиальная схема ИУ ЭМКД.
Введены следующие обозначения:
1 - ИУ ЭМКД;
2 - корпус КА;
3 - орбита КА;
4 - силовые линии магнитного поля Земли;
5 - плоскость магнитного экватора;
6 - Земля;
7 - штанга-держатель;
8 - магнитный экран ИУ;
9 - кольцевой держатель магнитного экрана;
10 - силовые линии сердечника - линии магнитной индукции ИУ;
11 - обмотка соленоида неферромагнитные стенки соленоидов;
12 - магнитомягкий сердечник соленоида;
13 - выходной вектор магнитного потока из ИУ;
14 - АП;
15 - неферромагнитная трубка соленоида;
16 - двигатели коррекции;
ЦМ КА - центр масс КА.
Под ИУ следует понимать самостоятельную функциональную часть целого - ЭМКД; каждый модуль - ИУ вносит свой одинаковый с другими модулями вклад в общую тягу ЭМКД.
Обоснование предлагаемого решения
Силовые линии 4 магнитного поля Земли в локациях можно рассматривать как равновекторные, а само магнитное поле можно считать однородным. Тогда столб локального околоземного пространства (СЛОП), ось магнитной симметрии которого совпадает с осью магнитной симметрии ИУ, можно считать вакуум-сердечником некоего соленоида, площадь торца которого равна площади торца основного соленоида ИУ.
Вращательное движение соленоида или просто постоянного магнита в магнитном поле Земли наблюдаемо уже на примере магнитной стрелки компаса. Вращательное движение намагниченного тела во внешнем магнитном поле обязано несовпадением направлений интегральной магнитной индукции поля этого тела и магнитной индукции источника внешнего магнитного поля, с учетом, в меньшей степени - замкнутости силовых линий внешнего контура магнитного поля тела, которые, в отсутствие возмущающих факторов, образуют фигуру вращения, в общем случае, переменного сечения. Придавать особого значения этому (последнему) фактору не следует. На практике силовые линии магнитного поля под действием внешних факторов, таких как потоки плазмы или просто жидкости, способны сильно деформироваться и даже уноситься вслед набегающему потоку, что говорит только о декларативной замкнутости силовых линий магнитных полей. Имеют решающее значение магнитные потоки в районе полюсов электромагнита. Чем плотнее встречающиеся магнитные потоки опытного образца и внешней среды, тем, при прочем равном, больше момент силы относительно центра вращения.
Почему не наблюдается поступательное движение ИУ с соленоидом без магнитного экрана в локально однородном магнитном поле Земли? Потому, что интересующее взаимодействие одного полюса соленоида со СЛОП (всегда говорим именно о соленоидах - цилиндрических катушках индуктивности) полностью компенсируемо взаимодействием со СЛОП другого полюса соленоида: на соленоид действует пара сил взаимно противоположных направлений. При этом внешний контур магнитного поля соленоида не может вызывать его поступательного движения, что демонстрируется взаимодействием пробного соленоида с двумя другими соленоидами, имеющими одинаковые характеристики магнитного поля, когда центры всех соленоидов находятся на одной линии, перпендикулярной их осям.
Еще одно соображение. Если пару соленоидов закрепить на каком-либо объекте на достаточном диагонально противоположном удалении от центра масс этого объекта так, чтобы производить всегда равенство плеч сил, ориентация объекта в пространстве нарушаться не будет.
Центральная часть магнитного экрана 8 имеет форму конуса, лучше - гиперболического, способного более эффективно ориентировать оси намагниченности доменов вдоль направляющих, ведущих к краям этого магнитного экрана-диска. Попадая внутрь магнитного экрана, в немалой степени благодаря этому конусу, вершина которого обращена к центру сердечника 12 соленоида ИУ, силовые линии 10 сердечника соленоида расходятся лучами от центра экрана или сходятся к этому центру, проходя весь объем экрана практически без потерь. Силовые линии 4 магнитного поля Земли (МПЗ) со стороны экрана взаимодействуют с силовыми линиями 10 ИУ, усиливая или ослабляя суммарное магнитное поле только внутри экрана. За краями диска результирующее влияние этих силовых линий полностью сбалансировано. Потому магнитный экран в полной мере отвечает своему назначению.
Теперь можно говорить об одностороннем воздействии МПЗ на работающее ИУ (то же, что и на соленоид).
Сила F (притяжения, подъемная сила) электромагнита рассчитывается по известной [1] (Справочник по элементарной физике. Н.И.Кошкин, М.Г.Ширкевич, 10-е издание, М., Наука, 1988, стр. 140) формуле:
где В = μ0 μсН - магнитная индукция соленоида, Тл;
Н - напряженность поля внутри соленоида без сердечника, Гн;
μс - коэффициент усиления магнитной индукции поля в сердечнике соленоида - относительная магнитная проницаемость сердечника;
S - площадь поперечного сечения наконечника электромагнита (например, торца сердечника соленоида), м2;
μ0 = 4π⋅10-7 Н⋅А2 - магнитная постоянная;
μ - коэффициент усиления магнитной индукции внешнего магнитного поля - относительная магнитная проницаемость среды (для воздуха, вакуума μ равно 1).
Формула (1) применима для подъемных электромагнитов. Перепишем ее в виде:
где Rс - радиус сердечника, м.
Но F - это вообще-то сила действия магнита на намагничиваемое тело. В случае с подъемной силой грузового электромагнита считается, что наведенная магнитная индукция в намагничиваемом (намагниченном) теле та же, что и в подъемнике (хотя это не совсем так), и радиус Rс для магнита-подъемника тот же, что и совокупный радиус поднимаемого магнитовосприимчивого груза. Поскольку в нашем случае нет наведенной магнитной индукции, а есть активный, пусть и слабый магнит-Земля 6 со своей самостоятельной магнитной индукцией, будем формулу (2) приводить в соответствие нашему случаю:
где F - сила взаимодействия магнитных полей соленоида с сердечником 12 и Земли, Н;
В с - магнитная индукция АП 19 соленоида, Тл;
В вн - магнитная индукция (внешнего) МПЗ, Тл;
Ф с, Фвн - соответственно магнитный поток из АП 14 и встречный (внешний) магнитный поток индукции 4 МПЗ, Вб.
Сравним (3) с формулой силы взаимодействия (F0≡0) торцов двух одинаковых соосных соленоидов c одинаковой индукцией ([2] Б.М.Яворский и А.А.Детлаф, Справочник по физике, издание 7-е, стр.434, 437):
d >> Rс,(5)
где d - расстояние между торцами сердечников, м.
Условие (5) гарантирует, что линии магнитной индукции в достаточно узком цилиндрическом пространстве между соленоидами будут параллельны друг другу, то есть коллинеарны. Тем самым создаются идеальные (простейшие, точно описываемые) условия взаимодействия магнитных полей. Но формула (4) не работает при d равном нулю, а формулы (1) и (3) работают. Формула (1) имеет важное практическое значение, и она в представлении (3) в основном повторяет формулу (4). В случае с формулой (3) в линейных размерах имеет значение лишь площадь и соответственный радиус; в случае с формулой (4) имеет значение площадь и расстояние. Как в (3), так и в (4) μ равно 1.
Примем за отправные данные:
- I - ток нагрузки 5 А;
- U - напряжение на шинах КА 300/27 В;
- ρ - удельное сопротивление медных частей ЭМКД 0,0178⋅10-6Ом⋅м (обмотка);
- Bвн - на высоте геосинхронной 24-часовой орбиты (ГСхО) магнитная индукция 0,16…10-6 Тл;
- μс - коэффициент усиления магнитной индукции поля в соленоида, примем равным 1000.
ГСхО имеет ту же большую полуось, что и геостационарная орбита и отличается ненулевым наклонением.
Рассмотрим, какие материальные и энергетические затраты потребуются для создания приемлемой результирующей силы (равно - тяги) ЭМКД.
Следует отметить, что комплект ЭМКД состоит (фиг. 2) минимум из двух одинаковых ИУ 1, тяги которых направлены вдоль орбиты 3 КА, и расположенных на двух платформах, закрепленных на диагонально противоположных относительно центра масс КА посадочных местах корпуса 2 КА посредством штанг 7, длины которых, вкупе с расстояниями центров посадочных до центра масс КА, производят равенство плеч сил, действующих со стороны ЭМКД на ориентацию КА. Векторы тяг ИУ ЭМКД могут не проходить через ЦМ КА, так как такая ориентация векторов тяг предназначена, скорее всего, для двигателей 16 системы коррекции КА.
Рассмотрим техническую состоятельность одного ИУ 1 на высоте ГСхО. Будем иметь согласно (3) с учетом выдачи импульса тяги в точке орбиты, в принципе, где вектор 13 был бы коллинеарным силовым линиям 4 МПЗ:
где
N - число витков обмотки;
L = 4Rc - длина соленоида, м;
α 1, α2 - углы, отсчитываемые от оси соленоида, под которыми из середины АП (характерной точки) видны концы соленоида;
В данном примере угол α1 всегда равен π/2, поскольку характерная точка находится на оси соленоида и в его торце (или, - на АП 14).
Напряженность магнитного поля на концах соленоида без сердечника при I равном 5 A, толщине изоляции равной 10% диаметра сечения провода 1 мм и соответствующей концентрации 833 витков/м, составляет ([3] Б.М.Яворский и А.А.Детлаф, Справочник по физике, издание 8-е, стр.453) 2016 А/м, соответственно магнитная индукция ([3] стр. 458) 0,0025 Тл. Это немного, и соответствует начальному этапу технического намагничивания, когда зависимость магнитной проницаемости от магнитной индукции носит линейный характер. Именно здесь и возможно намагничивание и размагничивание без необратимых последствий. Магнитомягкий сердечник с коэффициентом усиления μс равным 1000 уже выбран. Малая коэрцитивная сила: при отключении от сети ЭМКД будет практически полностью размагничен.
Магнитная индукция соленоида в точках оси, совпадающих с его концами, равна:
где α1= π/2.
Остановимся на соотношении L = 4Rc. Тогда плотность магнитного потока (магнитная индукция) составит у АП:
Будем считать, что радиус АП 0,1 м. Тогда согласно (6) с учетом (8) тяга ИУ (при ассистировании геомагнитным полем) равна 10,13 мН или 1,0 Г. Пара ИУ ЭМКД обеспечивает 2,0 Г. Удовлетворительной тягой можно считать тягу более 4 Г - такая тяга используется в баллистическом обеспечении полетов КА и гарантирует деорбитинг (именно увод КА в плотные слои атмосферы) в приемлемые сроки даже с ГСхО. Хорошо бы иметь удовлетворительную тягу и уменьшить радиус АП 14. Пусть вместо одного ряда витков обмотки 11 у соленоида будет пять. Тогда тяга двух ИУ 1 при радиусе АП 0,05 м составит 25,3 мН (2,6 Г). Но ИУ на борту КА планируется 6-8 - по три-четыре ИУ на каждой из двух платформ. Это уже может быть 100 мН. Этого вполне достаточно для деорбитинга с ГСхО. Оптимальную напряженность магнитного поля в ИУ находят на этапе проектирования.
Следует отметить, что все формулы магнитной индукции и напряженности магнитного поля внутри соленоидов приведены для случаев измерения соответствующих величин на электрической оси соленоида. Напряженность магнитного поля выше, и величина магнитной индукции всего больше возле стенок 15, на которые наложена обмотка 11. Потому общий магнитный поток через АП 14 будет больше по сравнению с магнитным потоком, имеющим плотность (магнитную индукцию), рассчитанную по формуле (8).
В заявленном техническом решении описан лишь принципиальный подход к созданию тяги на борту КА с помощью ЭМКД и доказывается принципиальная и фактическая возможность решения такой задачи.
Подсчитаем общую длину обмоточного провода ЭМКД. Этот параметр является определяющим в отношении энергетической и массовой характеристик изделия. Имеем пять витков обмотки соленоида. Общую длину l обмоточного провода соленоида рассчитаем по формуле:
где N - количество рядов обмотки, 5;
Rст - внешний радиус стенки трубки 15 соленоида, м;
L - длина соленоида, м.
Общая длина обмоточного провода соленоида одного ИУ (см. ниже) при толщине стенки трубки 15 соленоида 4 мм составит 288 м, и общая длина обмоточного провода соленоидов при количестве модулей равном восьми составит 2307 м.
Фиксируем характеристики электрической цепи ЭМКД:
- внешний радиус стенки 15 соленоида - 0,054 м;
- радиус поперечного сечения обмоточного провода - 0,5 мм;
- толщина изоляции ~ 0,1 мм;
- количество ИУ ЭМКД - 8 шт.;
- длина обмоточного провода соленоида ~ 288 м;
- общая длина обмоточного провода ~ 2300 м;
- количество слоев витков обмотки 11 соленоида - 5;
- сопротивление обмотки соленоида ~ 6,5 Ом;
- общее сопротивление обмоток ЭМКД ~ 52 Ом;
- соединения соленоидов в ИУ и ИУ ЭМКД последовательные;
- напряжение ~ 260 В (отказываемся от дежурного напряжения в 27 В);
- ток в цепи ЭМКД ~ 5 А и электрическая мощность ~ 1300 Вт;
- диаметр диска магнитного экрана 400 мм;
- высота диска магнитного экрана без гиперболического конуса 5 мм;
- общая масса одного ИУ при плотности магнитомягкого железа - электротехнической стали 7,65⋅103 кг/м3 (сердечник 12, магнитный экран 8, не более 17,8 кг); при плотности меди 8,92⋅103 кг/м3 (обмотка 11 соленоида, не более 16,1 кг); при плотности алюминия 2,70⋅103 кг/м3 (неферромагнитные части ЭМКД: трубка соленоида 13, кольцевой держатель 9 магнитного экрана, не более 1,3 кг) порядка 35,2 кг или 35,2 кГ (Р = mg, где Р - нормированная сила тяжести (вес) в Н; m - масса, кг; g - ускорение свободного падения, 9,81 м/с2; по определению 1 кГ силы равен 9,81 Н; m кГ = 9,81⋅m·1Н; но в 9,81⋅m, Н содержится m кг массы, значит, m кГ силы соответствует m кг массы, и, если не хотим прибегать к не совсем определенному понятию веса, можем это понятие заменить на массу, приравняв кГ к кг. Это не противоречит тому, если бы мы хотели иметь в виду массу именно в кг. Дело вкуса). ЭМКД, состоящий из восьми ИУ, имеет массу 282 кг.
Уровень круглосуточной средней эффективной тяги ЭМКД:
где Fэфф - средняя эффективная тяга вдоль орбиты КА 3, Н;
k - количество модулей в ЭМКД;
F 0 = F - максимальная инструментальная тяга одного модуля ЭМКД при iМ равном π/2 и UM равном 0, Н;
iМ - наклонение орбиты 3 к плоскости магнитного экватора 5;
(cosUM)ср = 0,64 - средний косинус на интервале UM от 0 до π/2;
UM - текущий угол между положением КА в пространстве и точкой пересечения орбиты 3 КА с магнитным экватором Земли («магнитный» аргумент широты КА),
при среднем iМ порядка 58,5 градусов (географическое наклонение орбит КА) ± 10 градусов (отклонение магнитного полюса от географического) составит порядка 0,054 Н (5,5 Г). Будем иметь в виду сказанное выше о том, что напряженность магнитного поля на АП будет выше, чем рассчитанная по формуле (8).
На высоте низких круговых орбит (НКО), где для наклонных орбит средняя на витке Bвн равна 40⋅10-6 Тл, при тех же вышеприведенных фиксированных характеристиках ЭМКД, круглосуточная эффективная тяга будет в 250 раз больше и равна 13,5 Н (1,4 кГ). Конечно, массогабаритные характеристики ЭМКД на НКО можно уменьшить и должны быть в разы уменьшены. Уменьшая характерный радиус модуля ЭМКД в три раза с соответственным увеличением пропорций радиуса Rс к неизменной длине L, тем самым уменьшим массу ЭМКД в 9 раз. Тогда диаметр АП 14 станет равным 0,0333 м, масса одного ИУ - порядка 3,9 кг, общая масса восьми ИУ не более 32 кг. Тяга укомплектованного ЭМКД на НКО составит порядка 1,5 Н.
Конечно, приведенные характеристики ЭМКД - один из вариантов его решения. Можно найти решения более удачные. Можно, к примеру, перейти на напряжение ниже 260 В, поскольку спешить с деорбитингом, по большому счету, нерационально.
Поскольку энергобаланс КА нисколько не пострадает от круглосуточной работы ЭМКД, деорбитинг следует проводить круглосуточно, то есть безостановочно, для чего в точках вертекса, где аргументы широты КА равны π/2 или 3π/2, в электрической цепи ЭМКД следует переключать входные направления тока. Все это можно делать с земли, но лучше - согласно типовой программы, заложенной на борт КА, предусматривающей весь комплекс работ по деорбитингу в автоматическом (автономном) режиме с регламентным контролем оператором.
На фиг. 4 приведена зависимость тяги ЭМКД от высоты полета КА, в таблице 1 и таблице 2 приведены баллистические и временные характеристики полета геосинхронных КА (масса 3500 кг) с начала деорбитинга с высоты ГСхО и на заключительном этапе существования КА, в таблице 3 приведены баллистические и временные характеристики полета КА массы 1500 кг в условиях деорбитинга с НКО. В таблицах 1 - 3:
Δt - шаг расчета , временной интервал;
r/RЗ - отношение радиуса орбиты КА к среднему радиусу Земли;
r - радиус орбиты КА;
ΔV - приращение скорости;
V - орбитальная скорость;
Fэфф - тяга.
Время деорбитинга с геосинхронных 24-часовых орбит при начальной средней эффективной тяге 0,067 Н не превышает 9,5 месяцев. На высоких орбитах встречаются и малые КА с массой и 350 кг. Значит, ускорение КА под действием той же тяги 0,067 Н будет в 10 раз больше, что позволяет проводить значимую минимизацию массогабаритных характеристик ЭМКД. Время деорбитинга с высоты 1000 км при начальной средней эффективной тяге 1,5 Н и массе находящихся там КА не более 1500 кг составит 5 суток. Основная масса КА на НКО 250 - 350 кг. Значит, ускорение КА под действием той же тяги 1,5 Н будет в 4 - 6 раз больше, что также позволяет проводить значимую минимизацию массогабаритных характеристик ЭМКД.
Уводить КА со средних орбит, где находятся спутники глобальной навигационной связи типа ГЛОНАСС и GPS, на околоземные орбиты утилизации станет возможным, и разработка ЭМКД того стоит.
Следует отметить небольшие затраты трудовых и материальных ресурсов на реализацию заявленного устройства и превосходную степень надежности его работы (ломаться нечему).
Данное изобретение целесообразно использовать вместе с [4] (Способ ликвидации КА, уведенных с рабочих орбит в плотные слои атмосферы, и устройство для фрагментации КА в плотных слоях атмосферы (RU 2708407 МПК B64G 9/00).
Электромагнитный космический двигатель
Таблица 1
Таблица 2
Электромагнитный космический двигатель
Электромагнитный космический двигатель
Таблица 3

Изобретение относится к устройствам космического летательного аппарата для управления его положением в пространстве. Электромагнитный космический двигатель, преобразующий непосредственно электрическую энергию от источника постоянного тока на борту космического аппарата (КА) в кинетическую энергию, содержит индукционные устройства (ИУ), расположенные поровну на двух платформах, закрепленных на диагонально противоположных относительно центра масс КА посадочных местах корпуса КА посредством штанг. Индукционные устройства содержат соленоид с неферромагнитной трубкой, внутри которой находится магнитомягкий сердечник и неферромагнитный материал или вакуум, монолитный, дискообразный плоский магнитомягкий магнитный экран, центральная часть которого имеет форму гиперболического конуса и обращена внутрь трубки, жесткое соединение соосных соленоида и магнитного экрана. Размер экрана перекрывает возможность прямого взаимодействия магнитных полей Земли и ИУ со стороны ближайшего к экрану торца сердечника соленоида. Технический результат заключается в повышении эффективности электромагнитного двигателя. 4 ил., 3 табл.
Электромагнитный космический двигатель, преобразующий непосредственно электрическую энергию от источника постоянного тока на борту космического аппарата (КА) в кинетическую энергию, содержащий индукционные устройства (ИУ), расположенные поровну на двух платформах, закрепленных на диагонально противоположных относительно центра масс КА посадочных местах корпуса КА посредством штанг, расстояния центров посадочных мест которых до центра масс КА производят равенство плеч сил, и каждое из которых содержит: соленоид с неферромагнитной трубкой, внутри которой находится магнитомягкий сердечник и, под срез, - неферромагнитный материал или вакуум; монолитный, в целом дискообразный плоский магнитомягкий магнитный экран, центральная часть которого имеет форму гиперболического конуса и обращена внутрь трубки; жесткое соединение соосных соленоида и магнитного экрана, размер которого перекрывает возможность прямого взаимодействия магнитных полей Земли и ИУ со стороны ближайшего к экрану торца сердечника соленоида.
| СПОСОБ УВОДА ПРЕКРАТИВШИХ АКТИВНОЕ СУЩЕСТВОВАНИЕ КОСМИЧЕСКИХ АППАРАТОВ С РАБОЧИХ НАКЛОННЫХ И ЭКВАТОРИАЛЬНЫХ ОРБИТ В ПЛОТНЫЕ СЛОИ АТМОСФЕРЫ | 2018 |
|
RU2708406C1 |
| Способ флотации неметаллических полезных ископаемых | 1948 |
|
SU76876A1 |
| УСТРОЙСТВО ЛИНЕЙНОГО ЭЛЕКТРОМАГНИТНОГО ДВИЖИТЕЛЯ | 1998 |
|
RU2162812C2 |
| US 2020407083 A1, 31.12.2020. | |||

