Изобретение относится к области космической техники и может быть использовано для ориентации космических аппаратов (КА) различного назначения в орбитальной системе координат.
Среди известных способов ориентации КА в орбитальной системе координат наибольшей простотой, надежностью и экономичностью характеризуется способ, заключающийся в использовании для ориентации КА действующих на него гравитационных и центробежных моментов. Их действие приводит к стремлению удлиненных тел, движущихся по орбите, занять такое положение, при котором наибольшая ось тела была бы направлена в сторону центрального тела (вдоль местной вертикали), например Земли. Кроме того, если тело вытянуто несколько в меньшей степени и вдоль другой оси, перпендикулярной местной вертикали, то эта ось стремится расположиться перпендикулярно к плоскости орбиты. Этот способ реализован во многих известных системах ориентации, например, таких как а. с. N 173682, N 209546, N 232219, N 296680, N 326110, КА спутниковых систем "Цикада", "КОСПАССАРСАТ" и т.д.
С использованием этого способа обеспечивается ориентация и многих перспективных коммерческих и научных спутников, запущенных в последние годы или запуск которых планируется в ближайшее время, например таких как: UoSAT (Англия), KitSAT (Южная Корея), S80/T (Франция), PoSAT-1 (Португалия), TumgSAT (Малайзия), TMSAT (Англия), КосКон (Россия) и т.д.
Однако в чистом виде обычно использовать этот способ практически невозможно, т.к. из-за отсутствия в космосе внешней среды, способствующей эффективному рассеиванию энергии вращения КА, он будет совершать незатухающие колебания, амплитуды которых определяются начальными отклонениями осей системы координат, связанной с КА, от осей орбитальной системы координат. Для рассеивания энергии вращения колебаний КА используют трение, гистерезис в ферромагнитных материалах, токи Фуко и т.д., но наиболее эффективным является создание вдоль осей КА дополнительно к ориентирующим гравитационным и центробежным моментам, демпфирующих магнитных моментов, при взаимодействии которых с вектором индукции магнитного поля Земли (МПЗ), создаются механические моменты, обеспечивающие рассеивание энергии вращений КА.
За прототип по результатам исследования патентной и периодической печати, имеющейся на предприятии, взят способ ориентации, который использовался для ориентации КА США DODGE, находящегося на круговой экваториальной орбите ("Стабилизация искусственных спутников", под редакцией В.А. Сарычева, "Мир", М. , 1974 г., стр. 126-151). Этот способ заключается в создании эллипсоида инерции, ориентирующего КА в гравитационном поле Земли в орбитальной системе координат, путем перемещения элементов конструкции КА на заданные расстояния относительно друг друга, в первичном измерении через фиксированные интервалы времени сигналов, пропорциональных проекциям вектора индукции МПЗ на оси связанной с КА системы координат, запоминании величины и полярности измеренных сигналов до момента следующего первичного измерения, создании на временных интервалах между первичными измерениями демпфирующего магнитного момента вдоль каждой оси КА, величина которого пропорциональна величине измеренного и запомненного по этой оси сигнала первичного измерения, а направление соответствует полярности этого сигнала.
Демпфирование по этому способу обеспечивается следующим образом.
Предположим, что ось OX орбитальной системы координат направлена по местной вертикали в сторону от Земли. OY по направлению полета, OZ перпендикулярна к плоскости орбиты и направлена для случая экваториальной орбиты в сторону северного географического полюса Земли (для всех остальных случаев ось OZ дополняет систему координат до правой). Оси связанной с КА системы координат при идеальной ориентации совпадают с осями орбитальной системы координат, а при небольших угловых отклонениях угол поворота КА вокруг оси OX соответствует углу рыскания ψ, вокруг оси OY - углу крена ϕ и вокруг оси OZ - углу тангажа ν. Тогда при малых углах отклонения КА от орбитальной системы координат, дипольной модели МПЗ и с учетом составляющих первого порядка малости величины первичных измерений сигналов, пропорциональных проекциям вектора индукции МПЗ на оси связанной с КА системы координат для случая экваториальной орбиты, равны ("Стабилизация искусственных спутников", под редакцией В.А. Сарычева, "Мир", М., 1974 г., стр. 142):
где  абсолютная магнитная проницаемость, LE - магнитный момент диполя Земли, R - расстояние от центра масс Земли до центра масс КА.
абсолютная магнитная проницаемость, LE - магнитный момент диполя Земли, R - расстояние от центра масс Земли до центра масс КА.
Демпфирующие магнитные моменты на интервалах между первичными измерениями (t0 < t < t0 + r, где r - интервал между первичными измерениями) задаются как ("Стабилизация искусственных спутников", под редакцией В.А. Сарычева, "Мир", М., 1974 г., стр. 142):
Lx = KBx(t0),
Ly = KBy(t0), (2)
Lz = KBz(t0),
где K - коэффициент пропорциональности.
Выражения для проекций механического момента на оси связанной с КА системы координат при взаимодействии магнитных моментов L с вектором индукции имеют вид ("Стабилизация искусственных спутников", под редакцией В.А. Сарычева, "Мир", 1974 г., стр. 141):
Mmx = BzLy - ByLz,
Mmy = BxLz - BzLx, (3)
Mmz = ByLx - BxLy,
Подставив выражения (1) и (2) в (3) с учетом составляющих первого порядка малости, получим выражения для демпфирующих моментов ("Стабилизация искусственных спутников", под редакцией В.А. Сарычева, "Мир", М., 1974 г., стр. 143):
Способ, рассмотренный в прототипе, может быть использован не только на экваториальных орбитах, но и на орбитах с другим наклонением, например на очень важных с практической точки зрения околополярных орбитах. Действительно, при дипольной модели МПЗ проекции вектора индукции МПЗ на оси орбитальной системы координат для полярной орбиты имеют вид (Боевкин В.И., Гуревич Ю.Г., Павлов Ю.Н., Толстоусов Г.Н. "Ориентация искусственных спутников в гравитационных и магнитных полях", "Наука", М,, 1976 г., стр. 208):
где P = BN.
Тогда при малых углах отклонения КА от орбитальной системы координат с учетом составляющих первого порядка малости величины первичных измерений сигналов, пропорциональных проекциям вектора индукции МПЗ на оси связанной с КА системы координат, равны:
Подставив запомненные величины первичных измерений (6) в (2), получим:
Отсюда, подставив (6) и (7) в (3) и опуская промежуточные преобразования, получим с учетом составляющих первого порядка малости следующие выражения проекций вектора механического момента на оси связанной с КА системы координат:
Учитывая то, что при периоде первичных измерений, значительно меньшем, чем период обращения КА по орбите, Cosωt ≈ Cos0ωt, а Sinωt ≈ Sin0ωt, выражения (8) можно записать в более простой форме:
Из полученных выражений (9) видно, что и в случае полярной орбиты в выражениях проекций механического момента, который получается в результате взаимодействия создаваемых магнитных моментов с вектором индукции МПЗ, присутствуют демпфирующие составляющие: [ψ(t)-ψ(t0)]Cos2ωt - по углу рыскания, 4[ψ(t)-ψ(t0)]Sin2ωt - по углу крена, [ν(t)-ν(t0)]Cos2ωt и 4[ν(t)-ν(t0)]Sin2ωt - по углу тангажа. При этом демпфирование колебаний КА на полярной орбите в отличии от случая экваториальной орбиты (4) производится относительно трех осей.
Однако, несмотря на простоту и универсальность прототипа, ему присущи недостатки, а именно:
1. Низкая отказоустойчивость. Это обусловлено тем, что для нормального прохождения ориентации КА необходимо одновременно задавать магнитные моменты вдоль трех осей КА. В противном случае происходит потеря управления ориентацией. Действительно, например, в случае экваториальной орбиты при отсутствии возможности задания магнитного момента вдоль оси OZ КА, подставив (1) и (2) в (3) при Lz = 0, получим:
Как видно из выражения (10), в этом случае демпфирование полностью отсутствует, а относительно осей OX и OY на КА действуют дезориентирующие моменты.
Аналогично и для полярной орбиты, например, при Lx = 0, подставив (6) и (7) в (3), получим:
а при Ly = 0:
Из выражений (11) и (12) видно, что в случае полярной орбиты для рассмотренных примеров демпфирование сохраняется только в одном канале, в двух других каналах моменты не являются демпфирующими.
2. Способ требует создание магнитных моментов, пропорциональных величинам и знакам запомненных значений первичных измерений. Применение более простых методов, например создание магнитных моментов постоянной величины, независящей от величины запомненных значений первичных измерений, но со знаками, соответствующими знакам этих значений, является недопустимым. Например, если для случая экваториальной орбиты магнитные моменты задавать как:
Lx = KSignBx(t0),
Ly = KSignBy(t0), (13)
Lz = KSignBz(t0),
то после подстановки (1) и (13) в (3) выражения для проекций механического момента на оси связанной с КА системы координат с учетом составляющих первого порядка малости буду иметь вид:
Эти моменты не способствуют рассеиванию энергии колебаний КА. Они были бы демпфирующими, если бы задавались, например, по углу рыскания как Mmx= -KBNSign[ψ(t)-ψ(t0)]. Однако при использовании рассматриваемого способа такое задание магнитного момента невозможно, т.к. разность в квадратных скобах формируется не в аппаратуре, реализующей способ, а за счет процесса взаимодействия задаваемых магнитных моментов с вектором индукции МПЗ.
3. Ограниченная возможность уменьшения влияния помех от внешних источников, возмущающих МПЗ в районе КА, на величины демпфирующих моментов. Действительно, предположим для упрощения математических выкладок, что в данный момент внешний источник электромагнитного возмущения воздействует, например, на одну из компонент МПЗ, а именно, на Bx. Возмущение компоненты обозначим через ΔBx Предположим также, что запомненные сигналы, которые используются для задания магнитных моментов, могут быть подвергнуты любому из известных методов фильтрации, позволяющему исключить из запомненных первичных измерений искажения, вызываемые помехой ΔBx. Тогда выражения (3) для проекций вектора механического момента на оси системы координат, связанной с КА, примут вид:
Последние слагаемые во втором и третьем выражениях (15) представляют собой возмущающие добавки Δmy= ΔBxLz и Δmz= -ΔBxLy в проекции механического момента. Для случая экваториальной орбиты с учетом выражений (1) и (2) эти возмущающие добавки равны:
а для случая полярной орбиты с учетом (7):
Из (15), (16) и (17) видно, что уменьшение величин возмущающих добавок в демпфирующие моменты возможно только путем уменьшения внешних электромагнитных возмущений МПЗ, а это не всегда представляется возможным, например, в случаях магнитных бурь.
Предлагаемое изобретение предназначено для исключения перечисленных недостатков прототипа, а именно, повышения отказоустойчивости, снятия ограничений на создание магнитных моментов и увеличения его помехозащищенности.
Указанная цель достигается тем, что в способ ориентации КА, заключающийся в создании эллипсоида инерции, ориентирующего КА в гравитационном поле Земли в орбитальной системе координат, путем перемещения элементов конструкции КА на заданные расстояния относительно друг друга, в первичном измерении через фиксированные интервалы времени сигналов, пропорциональных проекциям вектора индукции МПЗ на оси связанной с КА системы координат, запоминании величины и полярности измеренных сигналов до момента следующего первичного измерения, создании демпфирующего магнитного момента вдоль каждой оси КА, вводят вторичные измерения сигналов, пропорциональных проекциям вектора индукции МПЗ, непрерывно или с временными интервалами, меньшими или равными по величине интервалам запоминания первичных измерений сигналов, сравнивают по каждой оси сигналы вторичных измерений с соответствующими запомненными сигналами первичных измерений, получают сигналы сравнения и создают непрерывно или на временных интервалах между вторичными измерениями демпфирующий магнитный момент вдоль каждой оси КА, величина которого постоянна или пропорциональна величине соответствующего данной оси КА сигнала сравнения, а направление противоположно полярности этого сигнала.
В этом случае демпфирующие магнитные моменты на интервалах между вторичными измерениями (tB < t < tB + rB, где rB интервал между вторичными измерениями) будут задаваться как:
Lx = -K[Bx(tB)-Bx(t0)],
Ly = -K[By(tB)-By(t0)], (18)
Lz = -K[Bz(tB)-Bz(t0)].
Отсюда с учетом (1) в случае экваториальной орбиты:
а с учетом (6) в случае полярной орбиты:
Подставив выражения (6), (19) и (20) в (3) и опуская промежуточные преобразования, а также учитывая для большей наглядности, что при близких по величине периодах первичных и вторичных измерений, но значительно меньших, чем период обращения КА по орбите, Cosωt ≈ Cos0ωt ≈ Cosвωt, а Sinωt ≈ Sin0ωt ≈ Sinвωt, получим с учетом составляющих первого порядка малости выражения для демпфирующих моментов для случая экваториальной орбиты:
и для случая полярной орбиты:
Сравнение выражений (4) с (21) и (9) с (22) показывает, что предлагаемое изобретение обеспечивает практически аналогичное демпфирование колебаний КА, что и прототип. При этом из выражений (21) и (22) видно, что если вторичные измерения проводятся непрерывно или с большой частотой, а частота проведения вторичных измерений не меняется, то эти выражения практически совпадают с выражениями (4) и (9). Таким образом, как видно из приведенных математических выкладок, предлагаемое изобретение сохраняет все полезные свойства прототипа.
Касательно недостатков прототипа:
1. Отказоустойчивость. Как видно из выражений (19), для случая экваториальной орбиты в предлагаемом изобретении по сравнению с выражениями (2) прототипа вообще не требуется создание магнитного момента Lz.
Рассмотрим случай полярной орбиты на тех же примерах, что и для прототипа. Подставив выражения (6) и (20) в выражение (3) при тех же самых допущениях, что и при выводе уравнений (22) и Lx = 0, получим:
а при Ly = 0:
Полученные выражения (23) и (24) показывают, что в случае полярной орбиты при невозможности создания магнитных моментов Lx и Ly демпфирование относительно всех осей сохраняется. Лишь только изменяется его эффективность относительно угла тангажа ν Результаты анализа также показывают, что на практике в целях упрощения управления демпфирование колебаний КА можно осуществлять путем создания магнитных моментов только вдоль двух осей системы координат, связанной с КА.
2. Предлагаемое изобретение расширяет возможности способа по созданию магнитных моментов. Оно допускает применение более простых методов, например создание магнитных моментов постоянной величины, независящей от величины измеренных или запомненных значений первичных и вторичных измерений. Например, как:
для случая экваториальной орбиты и как:
для случая полярной орбиты.
После подстановки (1) и (25) в (3) выражения для проекций механического момента на оси связанной с КА системы координат с учетом составляющих первого порядка малости для случая экваториальной орбиты будут иметь вид:
Из полученных выражений (27) видно, что и при создании магнитных моментов в соответствии с выражениями (25) демпфирование колебаний КА сохраняется.
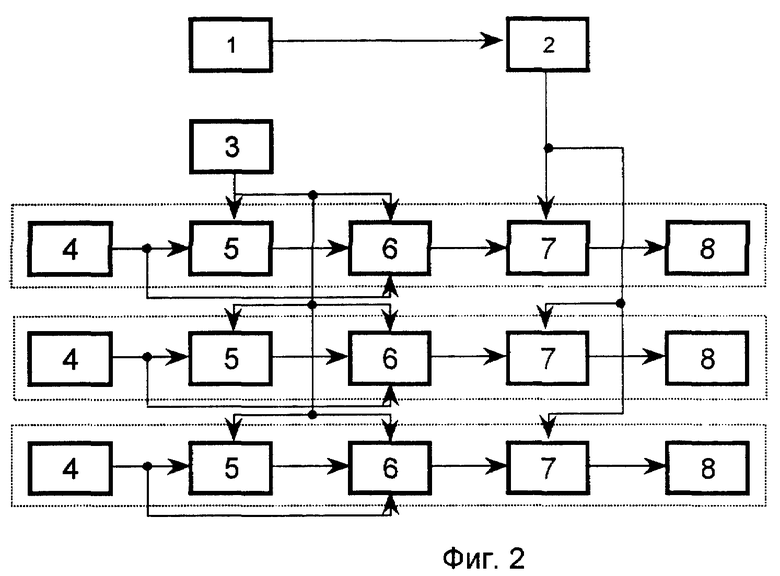
Ввиду сильной нелинейности уравнений проекций механического момента для случая полярной орбиты возможность демпфирования колебаний КА при создании магнитных моментов в соответствии с (26) была подтверждена результатами численного моделирования вращений КА, результаты которого приведены на фиг.1. Моделирование проводилось для КА, находящегося на орбите высотой 1000 км и наклонением i = 83o. Из графиков, приведенных на фиг. 1, видно, что примерно через 10 витков после включения демпфирования в соответствии с (26) устанавливается устойчивая ориентация КА в орбитальной системе координат.
3. Предлагаемое изобретение расширяет возможности способа по уменьшению влияния помех от внешних источников, возмущающих МПЗ в районе КА, на величины демпфирующих моментов. Действительно, как и в случае прототипа, предположим для упрощения математических выкладок, что в данный момент внешний источник электромагнитного возмущения воздействует, например, на одну из компонент МПЗ, а именно, на Bx. Возмущение компоненты обозначим через ΔBx. Предположим также, что сигналы первичных и вторичных измерений или сигналы сравнения, которые используются для задания магнитных моментов, могут быть подвергнуты любому из известных методов фильтрации, позволяющему исключить из запомненных первичных измерений искажения, вызываемые помехой ΔBx. Тогда последние слагаемые во втором и третьем выражениях (15), представляющие собой возмущающие добавки Δmy= ΔBxLz и Δmz= -ΔBxLy в проекции механического момента, для случая экваториальной орбиты с учетом выражений (19) равны:
а для случая полярной орбиты с учетом (20):
При малых периодах первичных и вторичных измерений выражения (29) примут вид: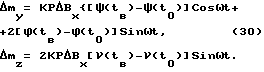
Из (28), (29) и (30) видно, что в этом случае уменьшение величин возмущающих добавок в демпфирующие моменты возможно не только путем уменьшения внешних электромагнитных возмущений МПЗ, но и выбором периодов проведения первичных и вторичных измерений. При этом, чем они меньше и ближе по величине, тем меньше возмущающие добавки в проекции механического момента.
Кроме того, как это видно из выражений (28), отсутствие необходимости в создании магнитного момента Lz теоретически почти полностью исключает помехи из канала демпфирования по углу крена ϕ. Аналогично и для случая полярной орбиты, например при Ly = 0, можно теоретически почти полностью исключить помехи из канала демпфирования по углу тангажа ν.
Для реализации указанного способа предлагается система ориентации, прототипом которой является система ориентации, реализующая способ-прототип и содержащая гравитационное устройство, датчик времени и три канала демпфирования, каждый из которых содержит блок памяти и магнитометр, выход которого соединен с первым входом блока памяти, второй вход которого соединен с выходом датчика времени, электромагнитное устройство и усилительно-преобразовательное устройство, выход которого соединен с входом электромагнитного устройства ("Стабилизация искусственных спутников", под редакцией В.А. Сарычева, "Мир", М., 1974 г., стр. 140). Функционирование каждого канала аналогично и заключается в следующем. После отделения КА от ракеты-носителя производится его успокоение, суть которого заключается в гашении угловых скоростей вращения КА, сообщаемых ему системой отделения, до заданных значений. По окончании успокоения и выдвижения гравитационной штанги сигнал первичных измерений с выхода магнитометра поступает в блок памяти и хранится там в течение заданного интервала времени. После запоминания сигнал с выхода этого блока, пропорциональный проекции вектора индукции МПЗ, измеренной магнитометром, поступает в усилительно-преобразовательное устройство. Усилительно-преобразовательное устройство в соответствии с выражениями (2) преобразуют этот сигнал в стабилизированный ток, величина которого пропорциональна сигналу с выхода блока памяти. Стабилизированный ток, протекая через обмотку электромагнитного устройства, создает требуемый демпфирующий магнитный момент. Величина этого магнитного момента сохраняется в течение заданного интервала времени, а затем в блок памяти вновь вводится сигнал с магнитометра, усилительно-преобразовательное и электромагнитные устройства создают новую величину демпфирующего магнитного момента для следующего интервала запоминания и т.д.
Этой системе ориентации присущи следующие недостатки, обусловленные недостатками способа-прототипа, а именно: низкая отказоустойчивость и помехозащищенность, сложность конструкции. Последнее является следствием ограничения на создание магнитных моментов, что требует при реализации сложного по конструкции усилительно-преобразовательного устройства для питания электромагнитного устройства линейно изменяющимся стабилизированным током.
Предлагаемая система ориентации предназначена для устранения вышеперечисленных недостатков, а именно: повышения отказоустойчивости и надежности, упрощения конструкции усилительно-преобразовательного устройства, увеличения помехозащищенности. Для этого в систему ориентации, содержащую гравитационное устройство, датчик времени и три канала демпфирования, каждый из которых содержит блок памяти и магнитометр, выход которого соединен с первым входом блока памяти, второй вход которого соединен с выходом датчика времени, электромагнитное устройство и усилительно-преобразовательное устройство, выход которого соединен с входом электромагнитного устройства, введены последовательно соединенный с гравитационным устройством блок установки уровней магнитных моментов, выход которого соединен с первым входом усилительно-преобразовательного устройства каждого канала демпфирования, а в каждый канал демпфирования введены блок сравнения, выход которого соединен со вторым входом усилительно-преобразовательного устройства, при этом первый вход блока сравнения соединен с выходом магнитометра, второй вход блока сравнения соединен с выходом блока памяти, а третий вход блока сравнения соединен с выходом датчика времени.
Блок-схема предлагаемой системы ориентации приведена на фиг. 2. Здесь: 1 - гравитационное устройство, 2 - блок установки уровней магнитных моментов, 3 - датчик времени, 4 - магнитометр, 5 - блок памяти, 6 - блок сравнения, 7 - усилительно-преобразовательное устройство и 8 - электромагнитное устройство.
Коротко, работа системы ориентации с учетом, что функционирование каждого канала демпфирования аналогично, может быть описана следующим образом. После отделения КА от ракеты-носителя производится его успокоение. Так как гашение угловых скоростей вращения КА, сообщаемых ему системой отделения, есть по существу их демпфирование, то система ориентации включается сразу по отделении КА. По включении системы ориентации проводятся первичные и вторичные измерения сигнала на выходе магнитометра (4). При этом вторичные измерения проводятся непрерывно или через временные интервалы, меньшие или равные интервалу проведения первичных измерений. Сигнал первичных измерений с выхода магнитометра (4) поступает в блок памяти (5) и хранится там в течение заданного интервала времени. После запоминания сигнал с выхода этого блока, пропорциональный проекции вектора индукции МПЗ, измеренной магнитометром, поступает в блок сравнении (6) на его второй вход. Сигнал вторичных измерений сразу поступает на первый вход блока сравнения (6). Блок сравнения (6) может быть выполнен, например, в виде обычного сумматора-вычитателя. Инвертированный сигнал результата сравнения сигналов первичных и вторичных измерений с выхода блока сравнения (6) поступает в усилительно-преобразовательное устройство (7). Усилительно-преобразовательное устройство (7) преобразует этот сигнал в стабилизированный ток. Величина этого тока, когда нет ограничений на простоту конструкции усилительно-преобразовательного устройства (7), может задаваться пропорциональной сигналу с выхода блока сравнения (6). При наличии ограничений, например, на массу или габариты усилительно-преобразовательного устройства (7), величина стабилизированного тока может задаваться постоянной по величине, но со знаком, соответствующим знаку сигнала с выхода блока сравнения (6). Стабилизированный ток, протекая через обмотку электромагнитного устройства (8), создает требуемый демпфирующий магнитный момент. Этот магнитный момент сохраняется в течение заданного для вторичных измерений интервала времени, а затем в блок сравнения (6) вновь вводится сигнал вторичных измерений с магнитометра (4) и т.д. Новая величина демпфирующего магнитного момента может быть сформирована и при обновлении содержимого блока памяти (5) по результатам первичных измерений. По окончании успокоения при выдвижении гравитационной штанги гравитационное устройство (1) выдает сигнал в блок установки уровней магнитных моментов (2), который формирует сигнал на изменение параметров усилительно-преобразовательного устройства (7) во всех каналах демпфирования. По этому сигналу усилительно-преобразовательные устройства (7) уменьшают величину стабилизированных токов, выдаваемых в обмотки электромагнитных устройств (8). Такое переключение уровней магнитных моментов необходимо в связи с тем, что для быстрого успокоения КА величины магнитных моментов электромагнитных устройств (8) должны быть значительно больше тех, которые необходимы для устойчивого демпфирования вращений КА при его ориентации в орбитальной системе координат (ввиду малости ориентирующих гравитационных и центробежных моментов).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА С УПРУГИМИ ВЫНОСНЫМИ ЭЛЕМЕНТАМИ | 1992 |
|
RU2020112C1 |
| Способ ориентации космического аппарата и устройство для реализации способа | 2016 |
|
RU2618664C1 |
| СПОСОБ ПРОВЕДЕНИЯ СЪЕМОК ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 2001 |
|
RU2232110C2 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 1992 |
|
RU2020113C1 |
| СПОСОБ ФОРМИРОВАНИЯ ГРАВИТАЦИОННОГО УСТРОЙСТВА И ГРАВИТАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2223895C2 |
| СПОСОБ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА В ПУТЕВОЙ СИСТЕМЕ КООРДИНАТ С ПРИВОДОМ ПОВОРОТА АППАРАТУРЫ НАБЛЮДЕНИЯ НАЗЕМНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2497728C2 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2009 |
|
RU2408508C1 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ИСКУССТВЕННОГО СПУТНИКА ЗЕМЛИ | 1998 |
|
RU2159201C2 |
Изобретение относится к космической технике, в частности к средствам ориентации космических аппаратов (КА), движущихся в гравитационном и магнитном полях по орбите вокруг планеты. При осуществлении гравитационной ориентации КА производят первичные и вторичные разные по частоте измерения проекций вектора индукции магнитного поля Земли. По результатам сравнения этих измерений формируют магнитные моменты, демпфирующие колебания КА при его гравитационной ориентации. Предлагаемая система ориентации содержит гравитационное устройство и три канала демпфирования, в которые введены блоки сравнения. Эти блоки связаны с выходами магнитометров, блоками памяти и устройствами создания магнитных моментов КА. Изобретение позволяет повысить отказоустойчивость и помехозащищенность, а также упростить конструкцию системы ориентации. 2 с.п.ф-лы, 2 ил.
| Стабилизация искусственных спутников | |||
| / Под ред | |||
| В.А.САРЫЧЕВА | |||
| - М.: Мир, 1974, с.126 - 151 | |||
| Способ гравитационной ориентации космического аппарата,движущегося по эллиптической орбите | 1979 |
|
SU888444A1 |
| US 3768756 A, 1973-10-30 | |||
| СПОСОБ СЖИГАНИЯ ТВЕРДОГО ТОПЛИВА | 2012 |
|
RU2498155C1 |

